
Pseudospectral-Based Rapid Trajectory Planning and Feedforward Linearization Guidance




Abstract
1. Introduction
2. Preliminaries
2.1. Mathematical Model of Reusable USV in TAEM Phase
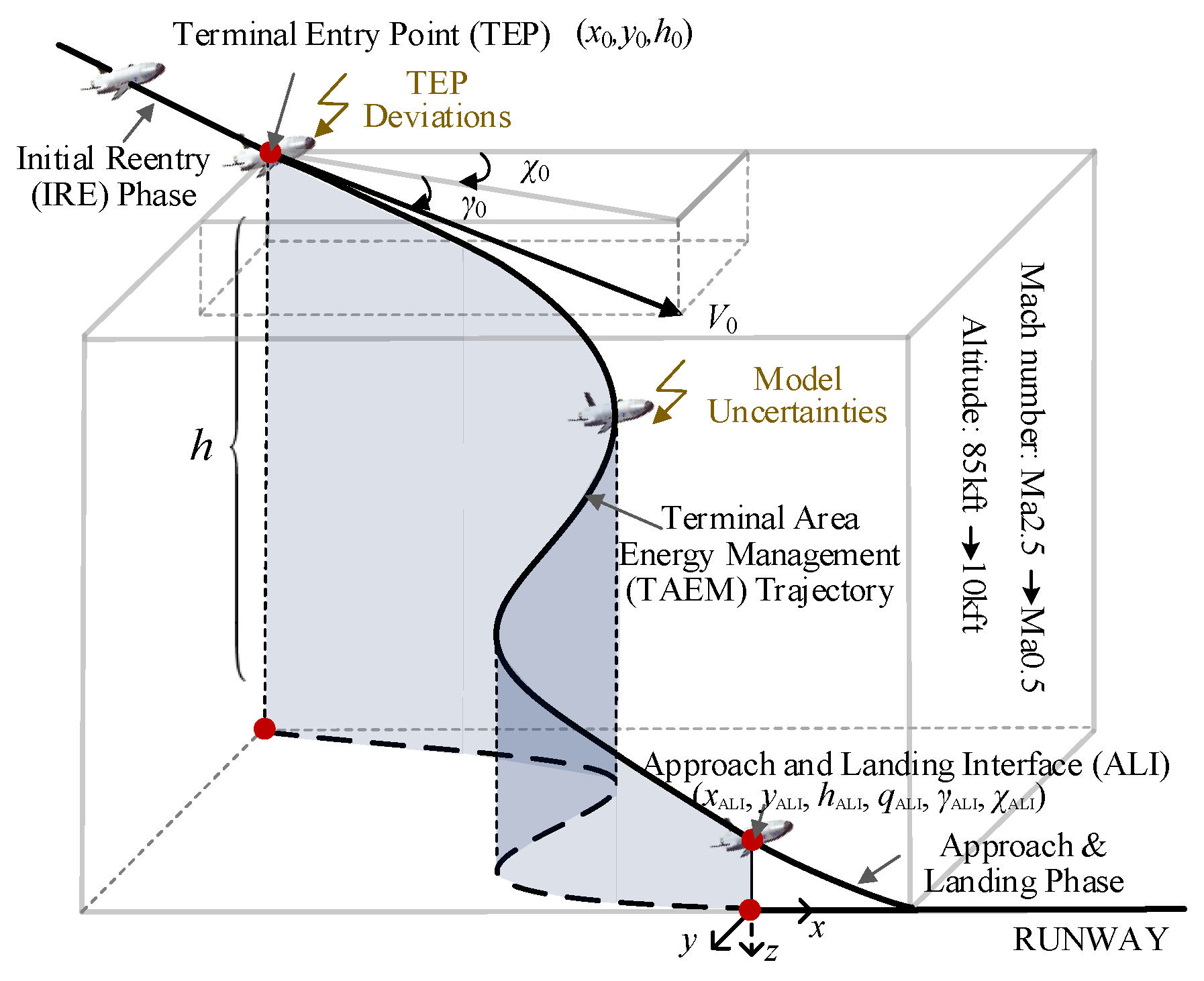
2.2. Description of the TAEM Guidance Problem
3. TAEM Guidance Strategy Design
4. Altitude-Domain Motion Equation and Its Flatness Property
4.1. Altitude-Domain-Based Model of USV in TAEM Phase
4.2. Flatness Property of Altitude-Domain Model
5. Trajectory Planning Problem Formulation
5.1. OCP Problem Formulation
5.2. OCP Reformulation in a Lower-Dimensional Space Using Flat Outputs
5.3. NLP Problem Formulation Using Pseudospectral-Based Discretization Method
5.3.1. The Pseudospectral Legendre Method
5.3.2. Disretization of Optimal Control Problem
6. Trajectory Generation Algorithm
6.1. Initialization of Variables to be Optimized
6.2. Trajectory Generation Algorithm Realization
7. Robust Trajectory Tracking Law
8. Numerical Simulations and Analysis
8.1. USV Model Description
8.2. Comparison Results with and without Initial Guess Strategy
8.3. Comparison Results with and without Dimension Reduction
8.4. Results for Different TAEM Entry Points
8.5. Results for Different Reference Dynamic Pressure Profiles
8.6. Closed-Loop Guidance Results with Consideration of Model Uncertainties
8.7. Monte Carlo Simulation Test
9. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Acquatella, P.; Briese, L.E.; Schnepper, K. Guidance command generation and nonlinear dynamic inversion control for reusable launch vehicles. Acta Astronaut. 2020, 174, 334–346. [Google Scholar] [CrossRef]
- Jo, B.U.; Ahn, J. Optimal staging of reusable launch vehicles for minimum life cycle cost. Aerosp. Sci. Technol. 2022, 127, 107703. [Google Scholar] [CrossRef]
- Tian, B.L.; Fan, W.R.; Su, R.; Zong, Q. Real-time trajectory and attitude coordination control for reusable launch vehicle in reentry phase. IEEE Trans. Ind. Electron. 2015, 62, 1639–1650. [Google Scholar] [CrossRef]
- Mu, L.X.; Wang, X.M.; Xie, R.; Zhang, Y.M.; Li, B.; Wang, J. A survey of the hypersonic flight vehicle and its guidance and control technology. J. Harbin Inst. Technol. 2019, 51, 1–14. [Google Scholar]
- Yao, J.; Xin, M. Finite-horizon near-optimal approach and landing planning of reusable launch vehicles. J. Guid. Control. Dyn. 2023, 46, 571–580. [Google Scholar] [CrossRef]
- Mu, L.X.; Xie, G.; Yu, X.; Wang, B.; Zhang, Y.M. Robust guidance for a reusable launch vehicle in terminal phase. IEEE Trans. Aerosp. Electron. Syst. 2022, 58, 1996–2011. [Google Scholar] [CrossRef]
- Zhou, H.; Wang, X.; Cui, N. Glide guidance for reusable launch vehicles using analytical dynamics. Aerosp. Sci. Technol. 2020, 98, 105678. [Google Scholar] [CrossRef]
- Moore, T.E. Space sHuttle Entry Terminal Area Energy Management; Technical Report NASA TM-104744; NASA Lyndon B. Johnson Space Center: Houston, TX, USA, 1991. [Google Scholar]
- Barton, G.H.; Grubler, A.C.; Dyckman, T.R. New methodologies for onboard generation of TAEM trajectories for autonomous RLVs. In Proceedings of the 2002 Core Technologies for Space Systems Conference, Colorado Springs, CO, USA, 19–21 November 2002. [Google Scholar]
- Horneman, K.; Kluever, C. Terminal area energy management trajectory planning for an unpowered reusable launch vehicle. In Proceedings of the AIAA Atmospheric Flight Mechanics Conference and Exhibit, Seattle, WA, USA, 16–19 August 2004; pp. 5183–5201. [Google Scholar]
- Kluever, C.; Horneman, K. Terminal trajectory planning and optimization for an unpowered reusable launch vehicle. In Proceedings of the AIAA Guidance, Navigation, and Control Conference and Exhibit, Honolulu, HI, USA, 18–21 August 2005; pp. 6058–6081. [Google Scholar]
- Salgueiro, F.N.R.; de Weerdt, E.; van Kampen, E.; Chu, Q.P.; Mulder, J.A. Terminal Area Energy Management Trajectory Optimization Using Interval Analysis. In Proceedings of the AIAA Guidance, Navigation, and Control Conference, Chicago, IL, USA, 10–13 August 2009; pp. 5768–5788. [Google Scholar]
- De Ridder, S.; Mooij, E. Terminal area trajectory planning using the energy-tube concept for reusable launch vehicles. Acta Astronaut. 2011, 68, 915–930. [Google Scholar] [CrossRef]
- Mu, L.X.; Yu, X.; Zhang, Y.M.; Li, P.; Wang, X.M. Trajectory Planning for Terminal Area Energy Management Phase of Reusable Launch Vehicles. IFAC-PapersOnLine 2016, 49, 462–467. [Google Scholar] [CrossRef]
- Mu, L.X.; Yu, X.; Zhang, Y.M.; Li, P.; Wang, X.M. Onboard guidance system design for reusable launch vehicles in the terminal area energy management phase. Acta Astronaut. 2018, 143, 62–75. [Google Scholar] [CrossRef]
- Kluever, C.A. Terminal guidance for an unpowered reusable launch vehicle with bank constraints. J. Guid. Control. Dyn. 2007, 30, 162–168. [Google Scholar] [CrossRef]
- Ridder, S.D.; Mooij, E. Optimal longitudinal trajectories for reusable space vehicles in the terminal area. J. Spacecr. Rockets 2011, 48, 642–653. [Google Scholar] [CrossRef]
- Morani, G.; Cuciniello, G.; Corraro, F.; Di Vito, V. On-line guidance with trajectory constraints for terminal area energy management of re-entry vehicles. Proc. Inst. Mech. Eng. Part J Aerosp. Eng. 2011, 225, 631–643. [Google Scholar] [CrossRef]
- Lan, X.J.; Liu, L.; Wang, Y.J. Online trajectory planning and guidance for reusable launch vehicles in the terminal area. Acta Astronaut. 2016, 118, 237–245. [Google Scholar] [CrossRef]
- Liang, Z.X.; Li, Q.D.; Ren, Z. Onboard planning of constrained longitudinal trajectory for reusable launch vehicles in terminal area. Adv. Space Res. 2016, 57, 742–753. [Google Scholar] [CrossRef]
- Kluever, C.A. Simple analytical terminal area guidance for an unpowered reusable launch vehicle. J. Guid. Control Dyn. 2022, 45, 740–747. [Google Scholar] [CrossRef]
- Kluever, C.A.; Neal, D.A. Approach and landing range guidance for an unpowered reusable launch vehicle. J. Guid. Control Dyn. 2015, 38, 2057–2066. [Google Scholar] [CrossRef]
- Sana, K.S.; Weiduo, H. Hypersonic reentry trajectory planning by using hybrid fractional-order particle swarm optimization and gravitational search algorithm. Chin. J. Aeronaut. 2021, 34, 50–67. [Google Scholar] [CrossRef]
- Zhang, Y.L.; Chen, K.J.; Liu, L.H.; Tang, G.J.; Bao, W.M. Entry trajectory planning based on three-dimensional acceleration profile guidance. Aerosp. Sci. Technol. 2016, 48, 131–139. [Google Scholar] [CrossRef]
- Sarkar, R.; Mukherjee, J.; Patil, D.; Kar, I.N. Re-entry trajectory tracking of reusable launch vehicle using artificial delay based robust guidance law. Adv. Space Res. 2021, 67, 557–570. [Google Scholar] [CrossRef]
- Chai, R.; Tsourdos, A.; Savvaris, A.; ChaiI, S.; Xia, Y. High-fidelity trajectory optimization for aeroassisted vehicles using variable order pseudospectral method. Chin. J. Aeronaut. 2021, 34, 237–251. [Google Scholar] [CrossRef]
- Cheng, G.; Jing, W.; Gao, C. Recovery trajectory planning for the reusable launch vehicle. Aerosp. Sci. Technol. 2021, 117, 106965. [Google Scholar] [CrossRef]
- Zhao, J.; He, X.; Li, H.; Lu, L. An adaptive optimization algorithm based on clustering analysis for return multi-flight-phase of VTVL reusable launch vehicle. Acta Astronaut. 2021, 183, 112–125. [Google Scholar] [CrossRef]
- Li, Y.; Wei, C.; He, Y.; Hu, R. A convex approach to trajectory optimization for boost back of vertical take-off/vertical landing reusable launch vehicles. J. Frankl. Inst. 2021, 358, 3403–3423. [Google Scholar] [CrossRef]
- Yakimenko, O.A. Direct method for rapid prototyping of near-optimal aircraft trajectories. J. Guid. Control Dyn. 2000, 23, 865–875. [Google Scholar] [CrossRef]
- Basset, G.; Xu, Y.; Yakimenko, O. Computing short-time aircraft maneuvers using direct methods. J. Comput. Syst. Sci. Int. 2010, 49, 481–513. [Google Scholar] [CrossRef]
- Wang, J.; Liang, H.; Qi, Z.; Ye, D. Mapped Chebyshev pseudospectral methods for optimal trajectory planning of differentially flat hypersonic vehicle systems. Aerosp. Sci. Technol. 2019, 89, 420–430. [Google Scholar] [CrossRef]
- Poustini, M.J.; Esmaelzadeh, R.; Adami, A. A new approach to trajectory optimization based on direct transcription and differential flatness. Acta Astronaut. 2015, 107, 1–13. [Google Scholar] [CrossRef]
- Morio, V.; Cazaurang, F.; Falcoz, A.; Vernis, P. Robust terminal area energy management guidance using flatness approach. IET Control Theory Appl. 2010, 4, 472–486. [Google Scholar] [CrossRef]
- Bryan, J.A. Maximum-Range Trajectories for an Unpowered Reusable Launch Vehicle. Master’s Thesis, University of Missouri, Columbia, MI, USA, 2011. [Google Scholar]
- Sira Ramirez, H.; Agrawal, S.K. Differentially Flat Systems; Marcel Dekker: New York, NY, USA, 2004. [Google Scholar]
- Williams, P.; Sgarioto, D.; Trivailo, P.M. Constrained path-planning for an aerial-towed cable system. Aerosp. Sci. Technol. 2008, 12, 347–354. [Google Scholar] [CrossRef]
- Zhuang, Y.F.; Ma, G.F.; Huang, H.B.; Li, C.J. Real-time trajectory optimization of an underactuated rigid spacecraft using differential flatness. Aerosp. Sci. Technol. 2012, 23, 132–139. [Google Scholar] [CrossRef]
- Chamseddine, A.; Zhang, Y.M.; Rabbath, C.A.; Theilliol, D. Trajectory planning and replanning strategies applied to a quadrotor unmanned aerial vehicle. J. Guid. Control Dyn. 2012, 35, 1667–1671. [Google Scholar] [CrossRef]
- Chamseddine, A.; Zhang, Y.M.; Rabbath, C.A.; Join, C.; Theilliol, D. Flatness-based trajectory planning/replanning for a quadrotor unmanned aerial vehicle. IEEE Trans. Aerosp. Electron. Syst. 2012, 48, 2832–2848. [Google Scholar] [CrossRef]
- Chamseddine, A.; Theilliol, D.; Zhang, Y.M.; Join, C.; Rabbath, C.A. Active fault-tolerant control system design with trajectory re-planning against actuator faults and saturation: Application to a quadrotor unmanned aerial vehicle. Int. J. Adapt. Control Signal Process. 2015, 29, 1–23. [Google Scholar] [CrossRef]
- Sun, S.; Romero, A.; Foehn, P.; Kaufmann, E.; Scaramuzza, D. A comparative study of nonlinear mpc and differential-flatness-based control for quadrotor agile flight. IEEE Trans. Robot. 2022, 38, 3357–3373. [Google Scholar] [CrossRef]
- Tal, E.; Karaman, S. Accurate tracking of aggressive quadrotor trajectories using incremental nonlinear dynamic inversion and differential flatness. IEEE Trans. Control Syst. Technol. 2020, 29, 1203–1218. [Google Scholar] [CrossRef]
- Yu, X.; Zhou, X.; Guo, K.; Jia, J.; Guo, L.; Zhang, Y. Safety flight control for a quadrotor UAV using differential flatness and dual-loop observers. IEEE Trans. Ind. Electron. 2021, 69, 13326–13336. [Google Scholar] [CrossRef]
- Desiderio, D.; Lovera, M. Guidance and control for planetary landing: Flatness-based approach. IEEE Trans. Control Syst. Technol. 2013, 21, 1280–1294. [Google Scholar] [CrossRef]
- Ross, I.M.; Fahroo, F. Pseudospectral methods for optimal motion planning of differentially flat systems. IEEE Trans. Autom. Control 2004, 49, 1410–1413. [Google Scholar] [CrossRef]
- Fliess, M.; Lévine, J.; Martin, P.; Rouchon, P. Flatness and defect of non-linear systems: Introductory theory and examples. Int. J. Control 1995, 61, 1327–1361. [Google Scholar] [CrossRef]
- Elnagar, G.; Kazemi, M.A.; Razzaghi, M. The pseudospectral Legendre method for discretizing optimal control problems. IEEE Trans. Autom. Control 1995, 40, 1793–1796. [Google Scholar] [CrossRef]
- Garg, D.; Hager, W.W.; Rao, A.V. Pseudospectral methods for solving infinite-horizon optimal control problems. Automatica 2011, 47, 829–837. [Google Scholar] [CrossRef]
- Chai, D.; Fang, Y.W.; Wu, Y.L.; Xu, S.H. Boost-skipping trajectory optimization for air-breathing hypersonic missile. Aerosp. Sci. Technol. 2015, 46, 506–513. [Google Scholar] [CrossRef]
- Milam, M.B. Real-Time Optimal Trajectory Generation for Constrained Dynamical Systems. Ph.D. Thesis, California Institute of Technology, Pasadena, CA, USA, 2003. [Google Scholar]
- Gill, P.E.; Murray, W.; Saunders, M.A. SNOPT: An SQP algorithm for large-scale constrained optimization. SIAM Rev. 2005, 47, 99–131. [Google Scholar] [CrossRef]
- Philip, E.; Murray, W.; Saunders, M.A. User’s Guide for SNOPT Version 7: Software for Large-Scale Nonlinear Programming; UCSD: San Diego, CA, USA, 2015. [Google Scholar]
- Hagenmeyer, V.; Delaleau, E. Exact feedforward linearization based on differential flatness. Int. J. Control 2003, 76, 537–556. [Google Scholar] [CrossRef]
- Hagenmeyer, V.; Delaleau, E. Robustness analysis with respect to exogenous perturbations for flatness-based exact feedforward linearization. IEEE Trans. Autom. Control 2010, 55, 727–731. [Google Scholar] [CrossRef]
- Pamadi, B.N.; Brauckmann, G.J.; Ruth, M.J.; Fuhrmann, H.D. Aerodynamic characteristics, database development, and flight simulation of the X-34 vehicle. J. Spacecr. Rocket. 2001, 38, 334–344. [Google Scholar] [CrossRef]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Types | Variables | Constraints |
|---|---|---|
| State | Dynamic pressure | |
| Terminal energy | Altitude | |
| Dynamic pressure | ||
| Terminal task | Cross-track position | |
| Down-track position | ||
| Heading angle | ||
| Flight path angle |
| Feature | Value | Unit |
|---|---|---|
| Mass | 560 | slug |
| Wing chord | 14.5 | ft |
| Wing span | 27.7 | ft |
| Reference area | 357.5 | |
| Max ratio | [2, 8] | / |
| Nominal TEP Conditions | Value | ALI Constraints | Value |
|---|---|---|---|
| , kft | 85 | , kft | 10 |
| , psf | 200 | , psf | 255 |
| , kft | , ft | 0 | |
| , kft | , ft | 0 | |
| , deg | , deg | 0 | |
| , deg | 60 | , deg |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Mu, L.; Cao, S.; Wang, B.; Zhang, Y.; Feng, N.; Li, X. Pseudospectral-Based Rapid Trajectory Planning and Feedforward Linearization Guidance. Drones 2024, 8, 371. https://doi.org/10.3390/drones8080371
Mu L, Cao S, Wang B, Zhang Y, Feng N, Li X. Pseudospectral-Based Rapid Trajectory Planning and Feedforward Linearization Guidance. Drones. 2024; 8(8):371. https://doi.org/10.3390/drones8080371
Chicago/Turabian StyleMu, Lingxia, Shaowei Cao, Ban Wang, Youmin Zhang, Nan Feng, and Xiao Li. 2024. "Pseudospectral-Based Rapid Trajectory Planning and Feedforward Linearization Guidance" Drones 8, no. 8: 371. https://doi.org/10.3390/drones8080371
APA StyleMu, L., Cao, S., Wang, B., Zhang, Y., Feng, N., & Li, X. (2024). Pseudospectral-Based Rapid Trajectory Planning and Feedforward Linearization Guidance. Drones, 8(8), 371. https://doi.org/10.3390/drones8080371