
Improved PSO-Based Two-Phase Logistics UAV Path Planning under Dynamic Demand and Wind Conditions

 ,
,  , and
, and
Abstract
1. Introduction
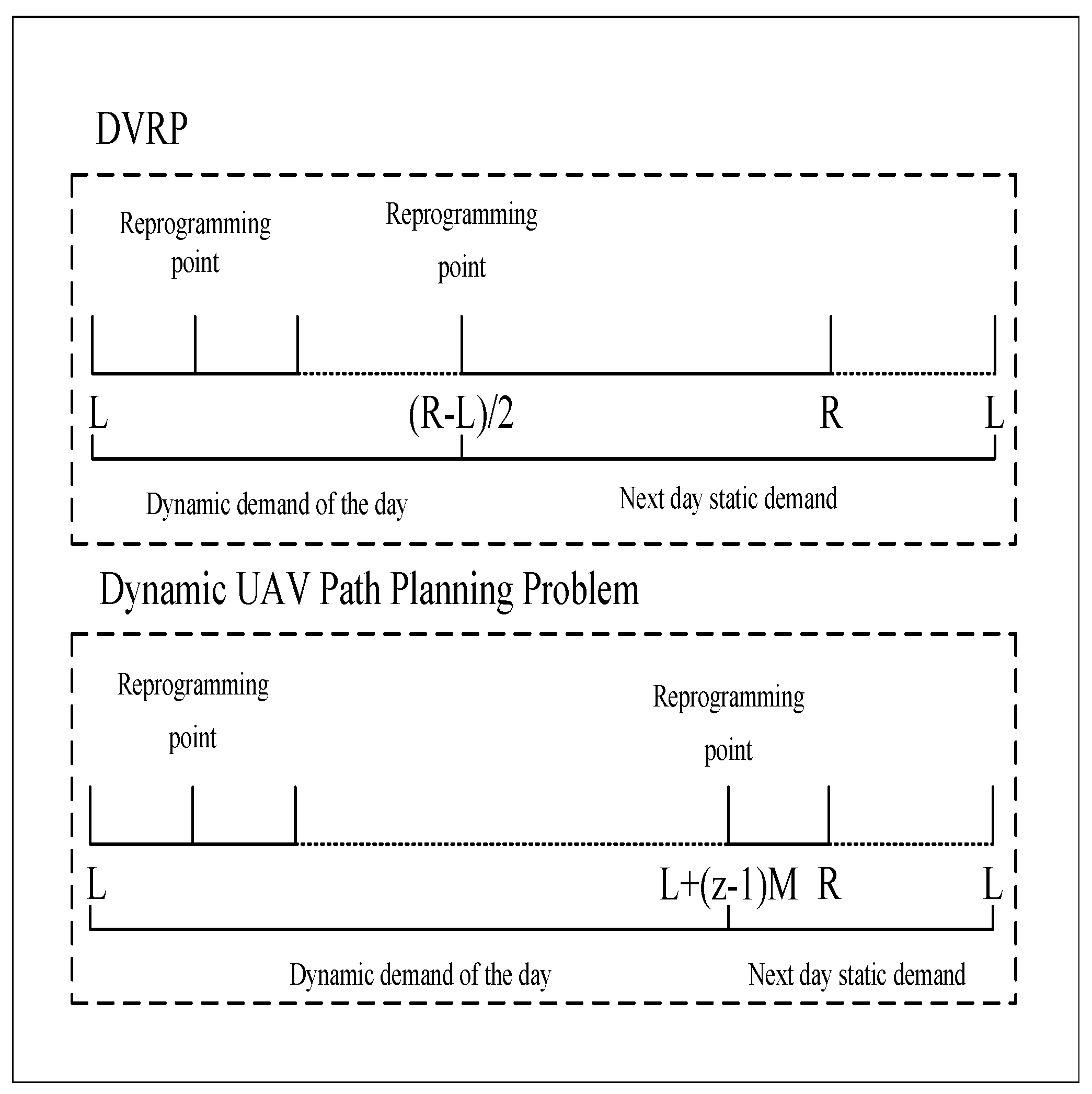
- We introduce the concept of time slicing, which accounts for the time-varying demand and wind, and then propose a two-phase logistics UAV path planning framework to address the dynamic customer demands through customer pool updates and kinetic attitude analysis. Based on this framework, the dynamic UAV path planning problem is transformed into a static problem at each time-slice node through initial pre-planning and subsequent delayed replanning. Then, a dynamic demand and wind-aware logistics UAV path planning problem is formulated to minimize the weighted average of the energy consumption cost and customer satisfaction penalty cost, while thoroughly considering constraints related to the energy consumption, load capacity, and hybrid time window.
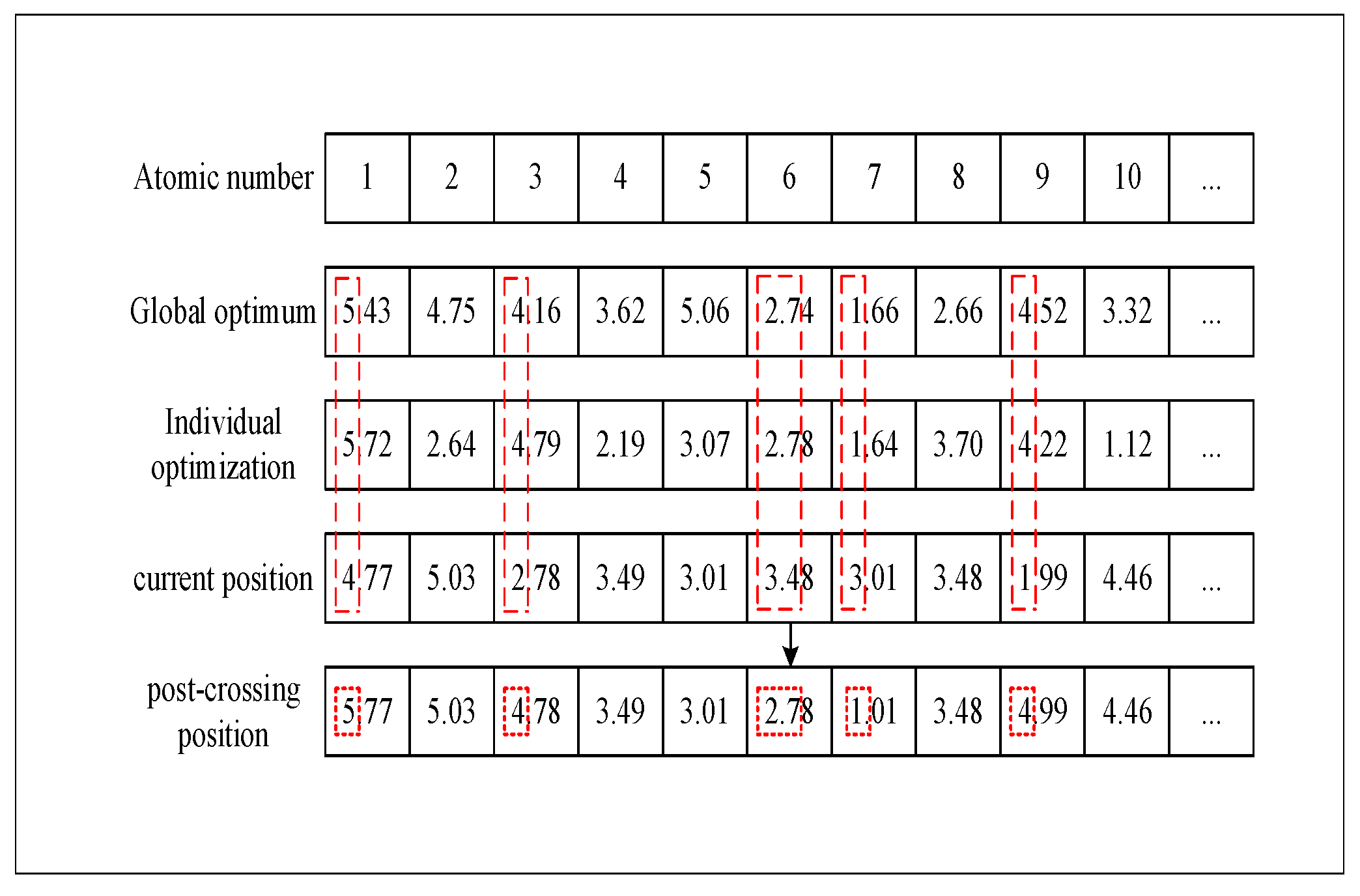
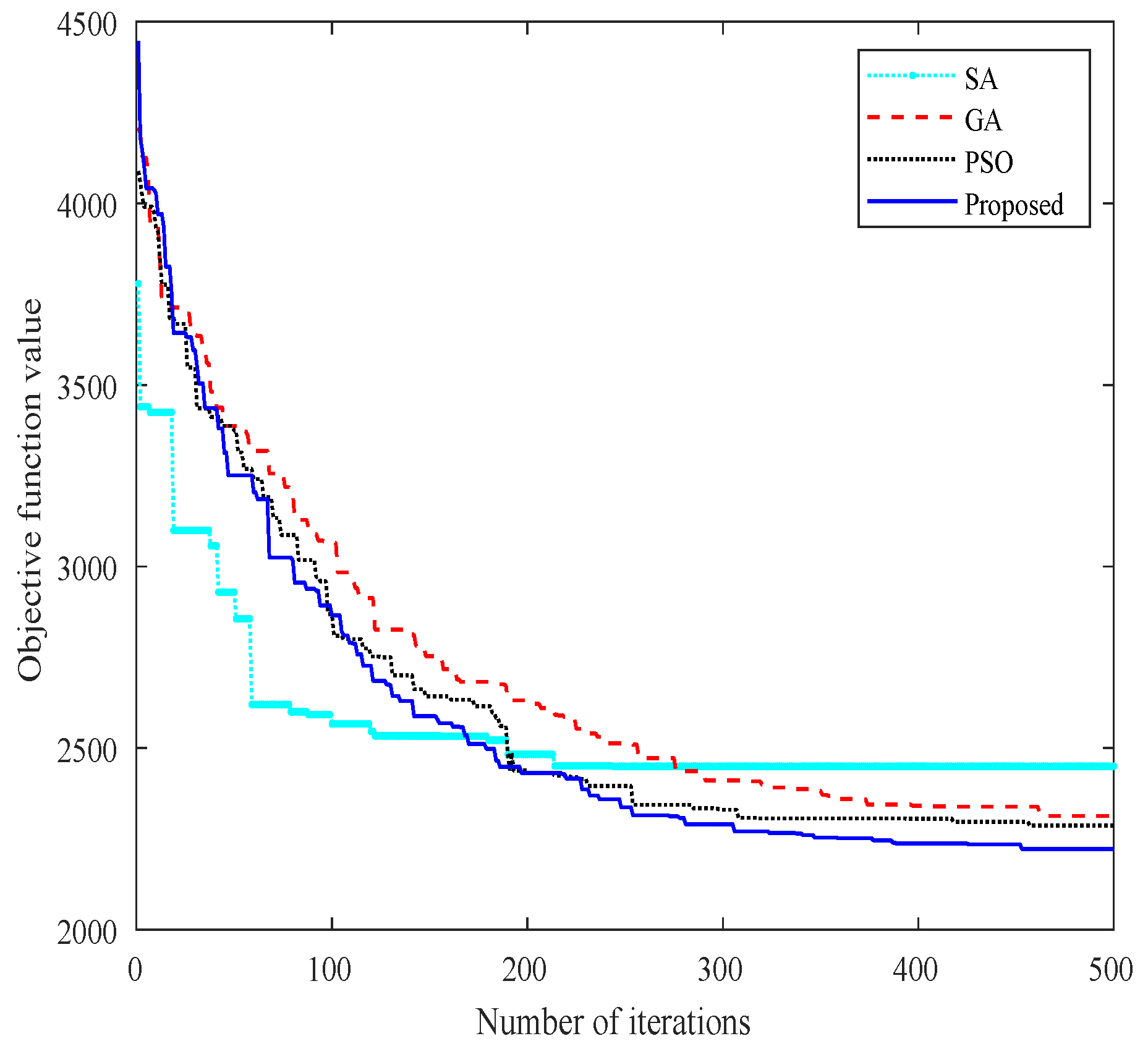
- To address the issue of slow convergence and the tendency of the traditional PSO algorithm to fall into local optima, we incorporate an inferior solution mutation strategy. Specifically, a threshold is established, and when the number of successive iterations without the appearance of a superior individual exceeds this threshold, poorly-adapted particles within the swarm are reinitialized. Furthermore, we introduce the concept of selective crossover, commonly found in GA, into the traditional PSO algorithm. This approach allows for the “inheritance” of better values from certain dimensions retained from previous iterations, enabling newly generated particles to search for optimal positions based on these values. Consequently, we have an improved PSO-based multiple logistics UAV path planning algorithm to solve the formulated problem, which has a good performance with fast convergence and better solutions.
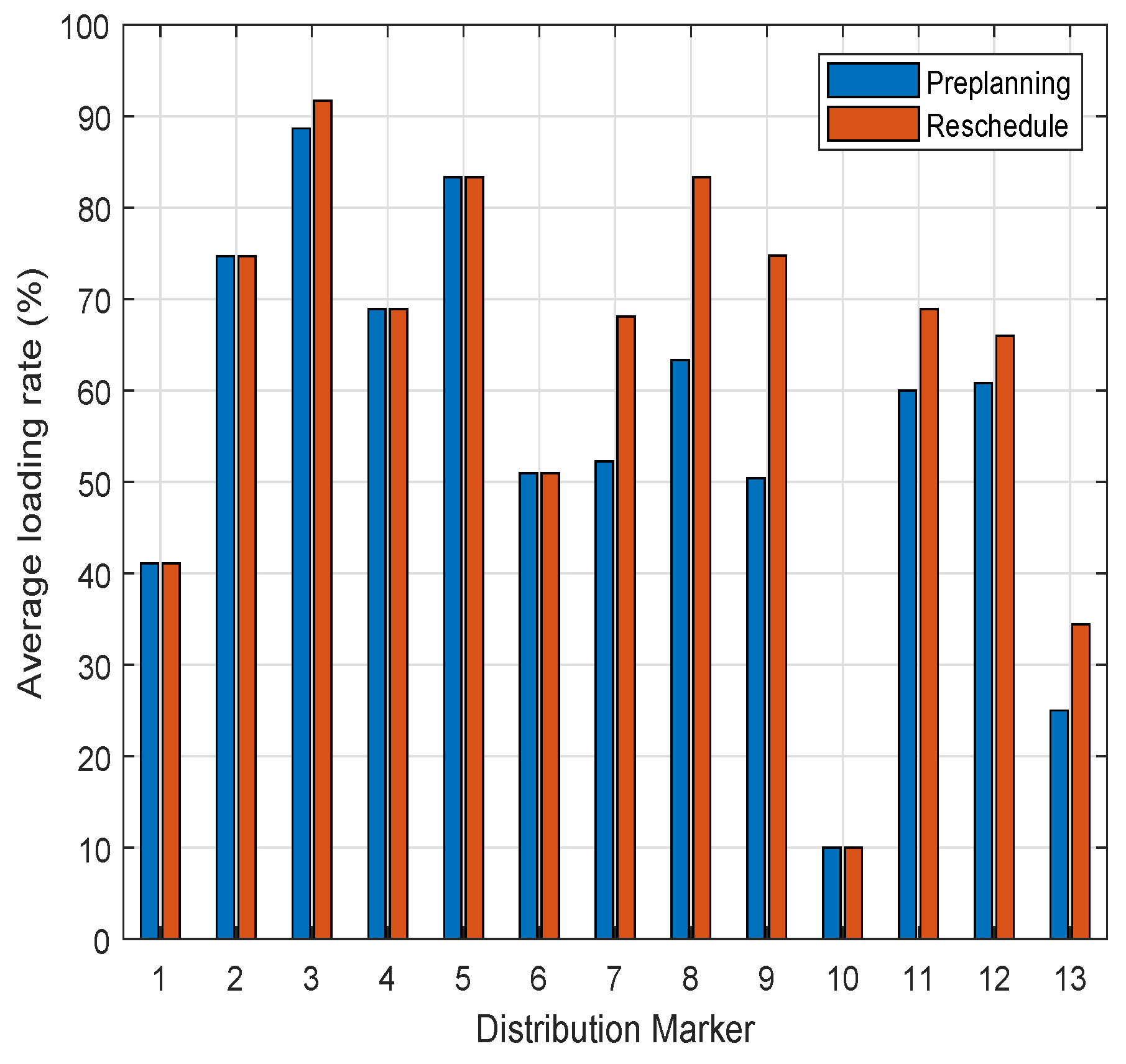
- To validate the advantages of the proposed algorithm, we utilize the Solomon-R201 dataset [41] for simulations, which is widely used as a standard benchmark dataset for testing and evaluating UAV delivery path planning algorithms. Wherein certain customer locations were randomized to represent new customer demands and alterations in existing customer information. Abundant simulation results verify that, when compared with the GA, simulated annealing (SA), and PSO-based UAV path planning strategies, the proposed algorithm achieves a satisfactory solution within a reasonable time and manages to reduce the distribution cost by up to % amidst the dynamic customer demands and wind. Moreover, the average loading rate and battery consumption rate on the distribution paths, where the customer locations undergoing replanning are situated, are enhanced to % and %, respectively. This enhancement significantly boosts the loading efficiency and battery utilization rate during the UAV distribution, adhering to the constraints of the UAV’s maximum load and battery power.
2. System Model and Problem Formulation
2.1. Network Model
- It is assumed that the logistics UAVs depart from and subsequently return to the depot upon completing their pickup and delivery services. These UAVs execute battery replacements, as well as cargo loading and unloading tasks within the depot, in minimal time. In addition, these UAVs are uniform in type, and details regarding their loaded battery power and maximum payload capacity are precisely defined.
- Each customer’s pickup and delivery requirements are serviced by a single UAV during a singular instance. These requirements cannot be divided, ensuring the total weight remains within the UAV’s maximum payload capacity. Furthermore, each customer’s location is accurately identified and falls within the UAV’s operational delivery range.
- During the delivery tasks, the UAV maintains a constant airspeed, with wind speed and direction subject to time variations, impacting the entire delivery process and range. Foreknowledge of changes in wind speed and direction is assumed. It is presumed that, despite changes in wind patterns during cross-node flights or flights across different wind speed and direction time windows, the UAV maintains its trajectory by adjusting its heading, ignoring the potential time and errors associated with heading adjustments.
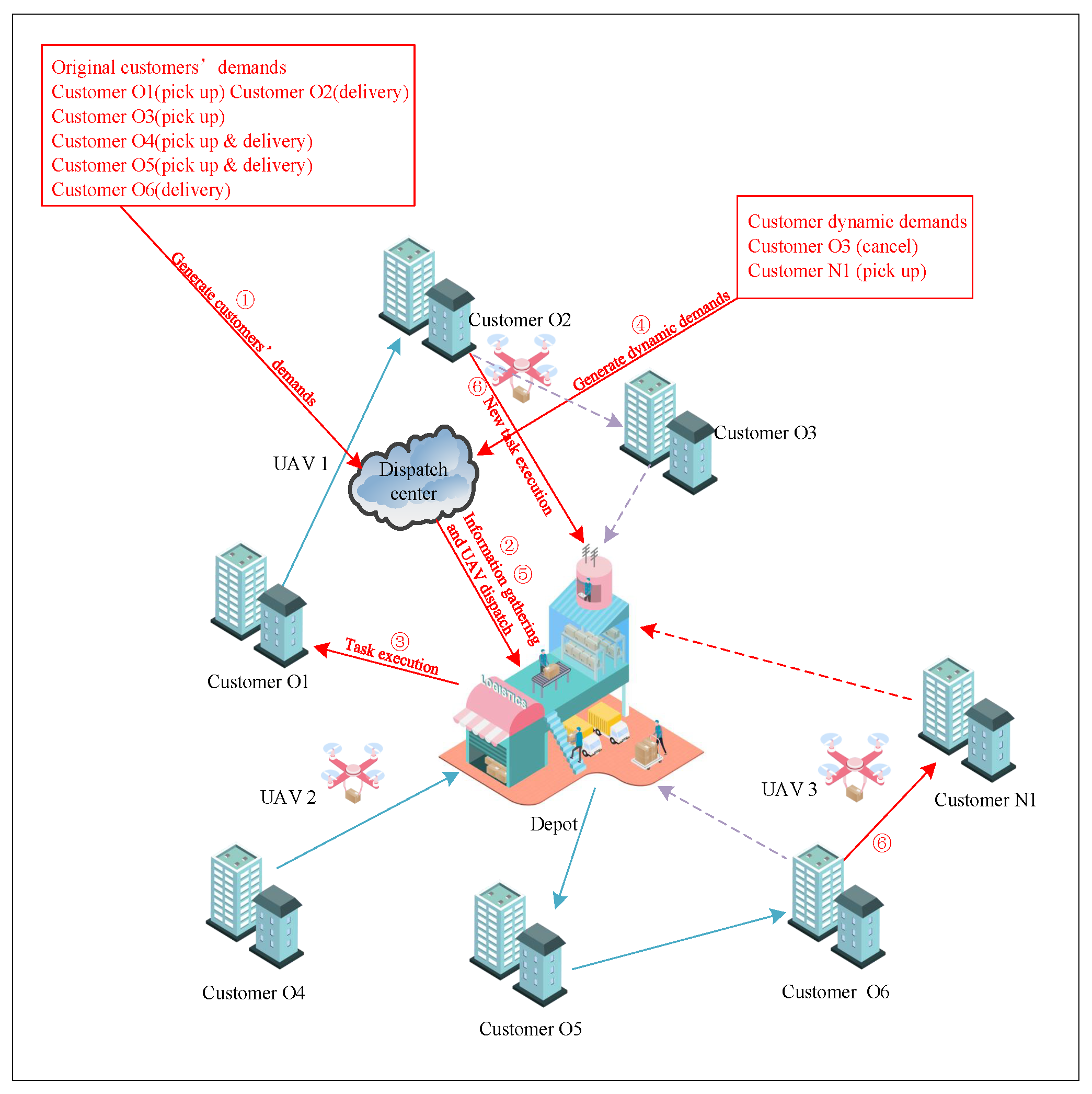
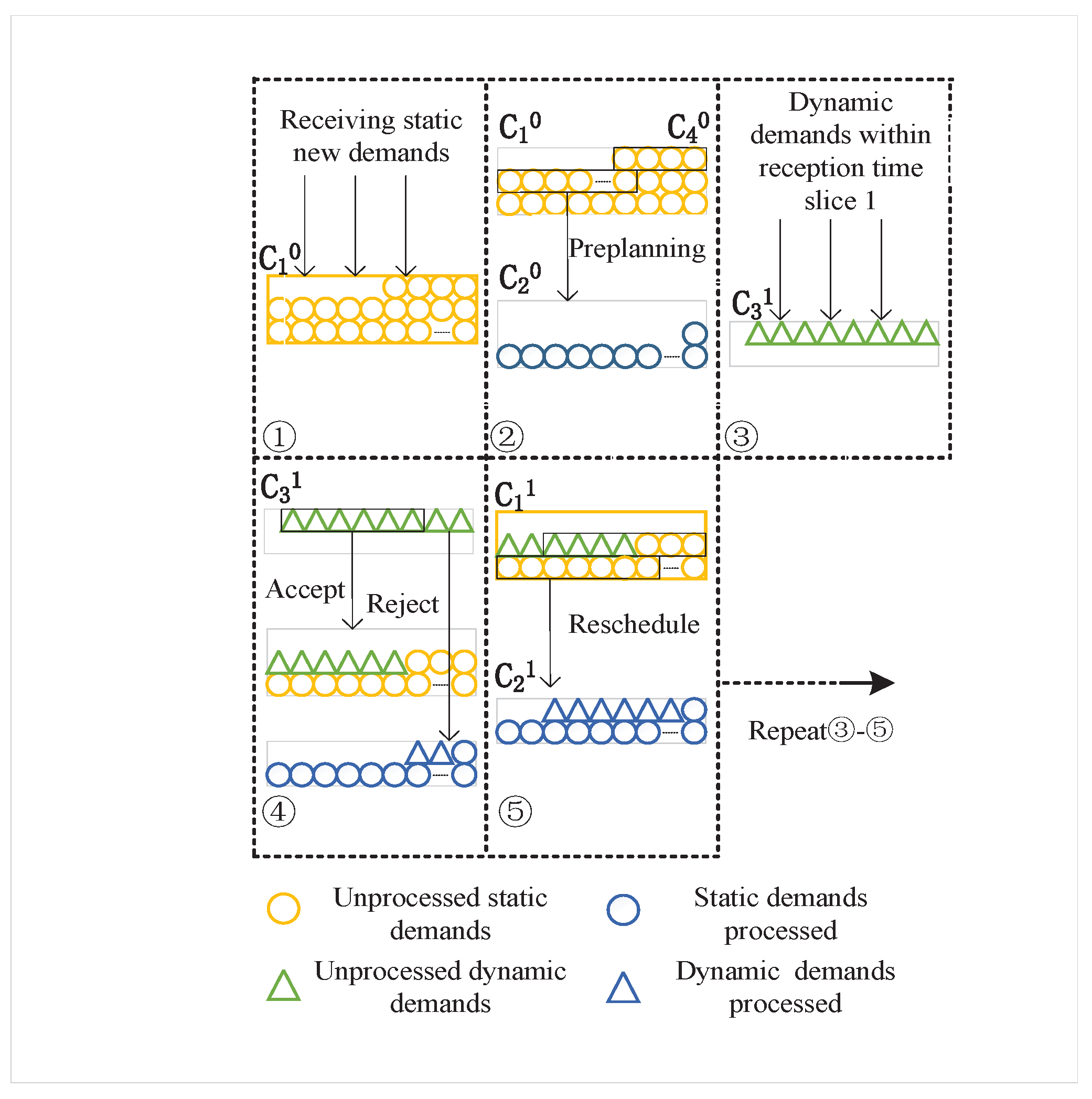
2.2. The Two-Phase Customer Demands Processing Model
2.3. The Dynamic Customer Pool Model
2.4. The Customers’ Dynamic Attitude Model
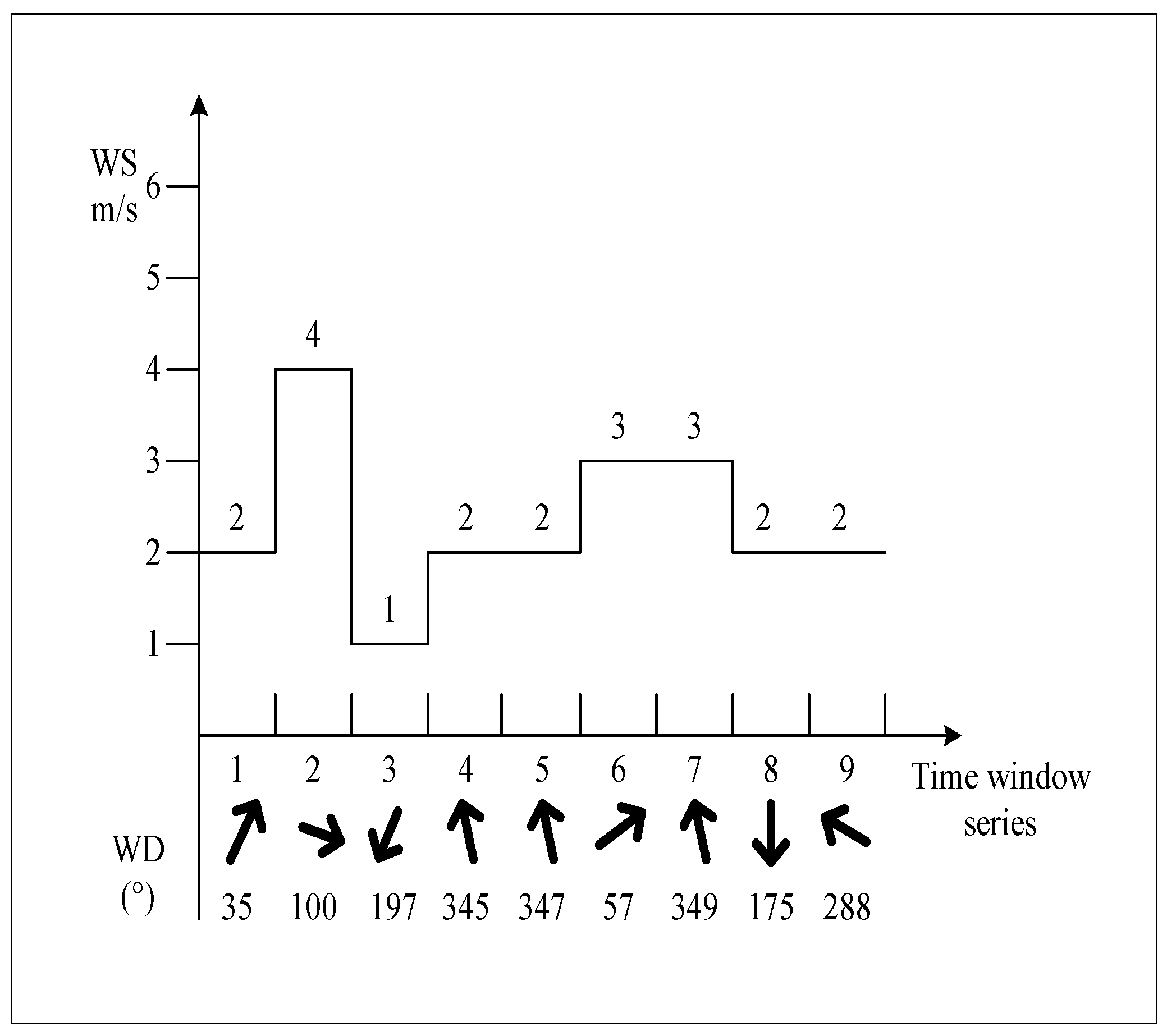
2.5. The Dynamic Wind Model
2.6. The Degree of Dynamism
2.7. Problem Formulation
3. Proposed Dynamic Demand and Wind-Aware Logistics UAV Path Planning Algorithm
3.1. The Description of Proposed Algorithm
| Algorithm 1 Dynamic Demand and Wind-aware Logistics UAV Path Planning Algorithm |
|
3.2. The Improved PSO-Based UAV Path Pre-Planning Algorithm
| Algorithm 2 The Improved PSO-based UAV Path Pre-Planning Algorithm |
|
3.2.1. Encoding and Decoding Strategies
3.2.2. Update of Particles
3.2.3. Calculation of Individual Fitness Values
3.2.4. The Mutation Strategy
3.2.5. Selection of Cross-Cutting Strategy
3.3. The Insertion-Based Local Optimization Algorithm
| Algorithm 3 The Insertion-based Local Optimization Algorithm |
|
3.4. The Analysis of Time Complexity
4. Simulation Results
4.1. Simulation Scenario and Parameters Description
4.2. Simulation Results Analysis
5. Conclusions and Future Work
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Ding, Y.; Jin, M.; Li, S.; Feng, D. Smart Logistics Based on the Internet of Things Technology: An Overview. Int. J. Logist. Res. Appl. 2021, 24, 323–345. [Google Scholar] [CrossRef]
- Feng, B.; Ye, Q. Operations Management of Smart Logistics: A Literature Review and Future Research. Front. Eng. Manag. 2021, 8, 344–355. [Google Scholar] [CrossRef]
- Aliahmadi, A.; Nozari, H.; Ghahremani-Nahr, J. Big Data IoT-based Agile-lean Logistic in Pharmaceutical Industries. Int. J. Innov. Manag. Econ. Soc. Sci. 2022, 2, 70–81. [Google Scholar] [CrossRef]
- Li, X.; Gong, L.; Jiang, F.; Shi, W.; Fan, L.; Gao, H.; Li, R.; Xu, J. Solving the Last Mile Problem in Logistics: A Mobile Edge Computing and Blockchain-Based Unmanned Aerial Vehicle Delivery System. Concurr. Comput. Pract. Exp. 2022, 34, e6068. [Google Scholar] [CrossRef]
- Jones, W.D. Amazon Plans to Take Home Delivery to New Heights. IEEE Spectr. 2023, 60, 16–17. [Google Scholar] [CrossRef]
- Yigit, K.A.; Dalkiran, A.; Karakoc, T.H. Applications of Drones in the Health Industry. In Unmanned Aerial Vehicle Design and Technology; Springer: Cham, Switzerland, 2023; pp. 69–93. Available online: https://link.springer.com/chapter/10.1007/978-3-031-45321-2_5 (accessed on 25 May 2024).
- Baloch, G.; Gzara, F. Strategic Network Design for Parcel Delivery with Drones under Competition. Transp. Sci. 2020, 54, 204–228. [Google Scholar] [CrossRef]
- Agatz, N.; Bouman, P.; Schmidt, M. Optimization Approaches for the Traveling Salesman Problem with Drone. Transp. Sci. 2018, 52, 965–981. [Google Scholar] [CrossRef]
- Chiang, W.C.; Li, Y.; Shang, J.; Urban, T.L. Impact of Drone Delivery on Sustainability and Cost: Realizing the UAV Potential through Vehicle Routing Optimization. Appl. Energy 2019, 242, 1164–1175. [Google Scholar] [CrossRef]
- Wu, Y.; Low, K.H. An Adaptive Path Replanning Method for Coordinated Operations of Drone in Dynamic Urban Environments. IEEE Syst. J. 2020, 15, 4600–4611. [Google Scholar] [CrossRef]
- Campuzano, G.; Lalla-Ruiz, E.; Mes, M. The Dynamic Drone Scheduling Delivery Problem. In International Conference on Computational Logistics; Springer International Publishing: Cham, Switzerland, 2022; pp. 260–274. Available online: https://springer.longhoe.net/chapter/10.1007/978-3-031-16579-5_18 (accessed on 25 May 2024).
- Sawadsitang, S.; Niyato, D.; Tan, P.S.; Wang, P.; Nutanong, S. Shipper Cooperation in Stochastic Drone Delivery: A Dynamic Bayesian Game Approach. IEEE Trans. Veh. Technol. 2021, 70, 7437–7452. [Google Scholar] [CrossRef]
- Khamidehi, B.; Raeis, M.; Sousa, E.S. Dynamic Resource Management for Providing QoS in Drone Delivery Systems. In Proceedings of the 2022 IEEE 25th International Conference on Intelligent Transportation Systems (ITSC), Macau, China, 8–12 October 2022; pp. 3529–3536. Available online: https://ieeexplore.ieee.org/abstract/document/9922133 (accessed on 25 May 2024).
- Khanda, A.; Coro, F.; Das, S.K. Drone-Truck Cooperated Delivery under Time Varying Dynamics. In Proceedings of the 2022 Workshop on Advanced Tools, Programming Languages, and PLatforms for Implementing and Evaluating Algorithms for Distributed Systems, Salerno, Italy, 25 July 2022; Association for Computing Machinery: New York, NY, USA, 2022; pp. 24–29. [Google Scholar] [CrossRef]
- Sorbelli, F.B.; Corò, F.; Das, S.K.; Pinotti, C.M. Energy-Constrained Delivery of Goods with UAVs under Varying Wind Conditions. IEEE Trans. Intell. Transp. Syst. 2020, 22, 6048–6060. [Google Scholar] [CrossRef]
- Han, J.; Liu, Y.; Li, Y. Vehicle Routing Problem with UAVs Considering Time Windows and Dynamic Demand. Appl. Sci. 2023, 13, 13086. [Google Scholar] [CrossRef]
- Liu, Y. An Optimization-Driven Dynamic Vehicle Routing Algorithm for on-Demand Meal Delivery using UAVs. Comput. Oper. Res. 2019, 111, 1–20. [Google Scholar] [CrossRef]
- Glick, T.B.; Figliozzi, M.A.; Unnikrishnan, A. Case Study of Drone Delivery Reliability for Time-Sensitive Medical Supplies with Stochastic Demand and Meteorological Conditions. Transp. Res. Rec. 2022, 2676, 242–255. [Google Scholar] [CrossRef]
- Zhang, J.; Campbell, J.F.; Sweeney, D.C., II; Hupman, A.C. Energy Consumption Models for Delivery UAVs: A Comparison and Assessment. Transp. Res. Part Transp. Environ. 2021, 90, 102668. [Google Scholar] [CrossRef]
- Xu, J.; Liu, X.; Li, X.; Zhang, L.; Jin, J.; Yang, Y. Energy-Aware Computation Management Strategy for Smart Logistic System with MEC. IEEE Internet Things J. 2021, 9, 8544–8559. [Google Scholar] [CrossRef]
- Huang, H.; Hu, C.; Zhu, J.; Wu, M.; Malekian, R. Stochastic Task Scheduling in UAV-Based Intelligent on-Demand Meal Delivery System. IEEE Trans. Intell. Transp. Syst. 2021, 23, 13040–13054. [Google Scholar] [CrossRef]
- Huang, C.; Ming, Z.; Huang, H. Drone Stations-Aided Beyond-Battery-Lifetime Flight Planning for Parcel Delivery. IEEE Trans. Autom. Sci. Eng. 2022, 20, 2294–2304. [Google Scholar] [CrossRef]
- Cherif, N.; Jaafar, W.; Yanikomeroglu, H.; Yongacoglu, A. Disconnectivity-Aware Energy-Efficient Cargo-UAV Trajectory Planning with Minimum Handoffs. In Proceedings of the ICC 2021-IEEE International Conference on Communications, Montreal, QC, Canada, 14–23 June 2021; pp. 1–6. [Google Scholar] [CrossRef]
- Liu, Z.; Sengupta, R.; Kurzhanskiy, A. A Power Consumption Model for Multi-Rotor Small, Unmanned Aircraft Systems. In Proceedings of the 2017 International Conference on Unmanned Aircraft Systems (ICUAS), Miami, FL, USA, 13–16 June 2017; pp. 310–315. [Google Scholar]
- Dorling, K.; Heinrichs, J.; Messier, G.G.; Magierowski, S. Vehicle Routing Problems for Drone Delivery. IEEE Trans. Syst. Man Cybern. Syst. 2016, 47, 70–85. [Google Scholar] [CrossRef]
- Abeywickrama, H.V.; Jayawickrama, B.A.; He, Y.; Dutkiewicz, E. Comprehensive Energy Consumption Model for Unmanned Aerial Vehicles, Based on Empirical Studies of Battery Performance. IEEE Access 2018, 6, 58383–58394. [Google Scholar] [CrossRef]
- Cheng, C.; Adulyasak, Y.; Rousseau, L.M. Drone Routing with Energy Function: Formulation and Exact Algorithm. Transp. Res. Part B Methodol. 2020, 139, 364–387. [Google Scholar] [CrossRef]
- Chen, Y.; Baek, D.; Bocca, A.; Macii, A.; Macii, E.; Poncino, M. A Case for a Battery-aware Model of Drone Energy Consumption. In Proceedings of the 2018 IEEE International Telecommunications Energy Conference (INTELEC), Turino, Italy, 7–11 October 2018; pp. 1–8. [Google Scholar]
- Funabashi, Y.; Taniguchi, I.; Tomiyama, H. Work-in-progress: Routing of Delivery UAVs with Load-Dependent Flight Speed. In Proceedings of the 2019 IEEE Real-Time Systems Symposium (RTSS), Hong Kong, China, 3–6 December 2019; pp. 520–523. [Google Scholar]
- Ito, S.; Akaiwa, K.; Funabashi, Y.; Nishikawa, H.; Kong, X.; Taniguchi, I.; Tomiyama, H. Load and Wind Aware Routing of Delivery UAVs. UAVs 2022, 6, 50. [Google Scholar]
- Sorbelli, F.B.; Corò, F.; Palazzetti, L.; Pinotti, C.M.; Rigoni, G. How the Wind Can be Leveraged for Saving Energy in a Truck-Drone Delivery System. IEEE Trans. Intell. Transp. Syst. 2023, 24, 4038–4049. [Google Scholar] [CrossRef]
- Cheng, C.; Adulyasak, Y.; Rousseau, L.M. Robust Drone Delivery with Weather Information. History 2020, 26, 1189–1585. [Google Scholar] [CrossRef]
- Radzki, G.; Thibbotuwawa, A.; Bocewicz, G. UAVs Flight Routes Optimization in Changing Weather Conditions—Constraint Programming Approach. Appl. Comput. Sci. 2019, 15, 5–12. [Google Scholar] [CrossRef]
- Hamdi, A.; Salim, F.D.; Kim, D.Y.; Neiat, A.G.; Bouguettaya, A. Drone-as-a-Service Composition under Uncertainty. IEEE Trans. Serv. Comput. 2021, 15, 2685–2698. [Google Scholar] [CrossRef]
- Peng, L.; Murray, C. Parallel Drone Scheduling Traveling Salesman Problem with Weather Impacts. Available at SSRN 4254262 2022. [Google Scholar] [CrossRef]
- Das, D.N.; Sewani, R.; Wang, J. Synchronized Truck and Drone Routing in Package Delivery Logistics. IEEE Trans. Intell. Transp. Syst. 2020, 22, 5772–5782. [Google Scholar] [CrossRef]
- Tong, B.; Wang, J.; Wang, X.; Zhou, F.; Mao, X.; Zheng, W. Optimal Route Planning for Truck–Drone Delivery using Variable Neighborhood Tabu Search Algorithm. Appl. Sci. 2022, 12, 529. [Google Scholar] [CrossRef]
- Hong, F.; Wu, G.; Luo, Q.; Liu, H.; Fang, X.; Pedrycz, W. Logistics in the sky: A Two-Phase Optimization Approach for the Drone Package Pickup and Delivery System. IEEE Trans. Intell. Transp. Syst. 2023, 24, 9175–9190. [Google Scholar] [CrossRef]
- Meng, Q.; Chen, K.; Qu, Q. PPSwarm: Multi-UAV Path Planning Based on Hybrid PSO in Complex Scenarios. Drones 2024, 8, 192. [Google Scholar] [CrossRef]
- Sajid, M.; Mittal, H.; Pare, S.; Prasad, M. Routing and Scheduling Optimization for UAV Assisted Delivery System: A Hybrid Approach. Appl. Soft Comput. 2022, 126, 109225. [Google Scholar] [CrossRef]
- Solomon, M.M. Algorithms for the Vehicle Routing and Scheduling Problems with Time Window Constraints. Oper. Res. 1987, 35, 254–265. [Google Scholar] [CrossRef]
- Okulewicz, M.; Mandziuk, J. A Metaheuristic Approach to Solve Dynamic Vehicle Routing Problem in Continuous Search Space. Swarm Evol. Comput. 2019, 48, 44–61. [Google Scholar] [CrossRef]
- Du, P.; Shi, Y.; Cao, H.; Garg, S.; Alrashoud, M.; Shukla, P.K. AI-Enabled Trajectory Optimization of Logistics UAVs with Wind Impacts in Smart Cities. IEEE Trans. Consum. Electron. 2024, 70, 3885–3897. [Google Scholar] [CrossRef]
- Bouleft, Y.; Elhilali Alaoui, A. Dynamic Multi-Compartment Vehicle Routing Problem for Smart Waste Collection. Appl. Syst. Innov. 2023, 6, 30. [Google Scholar] [CrossRef]
- Khan, R.; Tausif, S.; Malik, A.J. Consumer Acceptance of Delivery Drones in Urban Areas. Int. J. Consum. Stud. 2019, 43, 87–101. [Google Scholar] [CrossRef]
- Felch, V.; Karl, D.; Asdecker, B.; Niedermaier, A.; Sucky, E. Reconfiguration of the Last Mile: Consumer Acceptance of Alternative Delivery Concepts. In Logistics Management: Strategies and Instruments for Digitalizing and Decarbonizing Dupply Chains-Proceedings of the German Academic Association for Business Research, Halle, 2019; Springer International Publishing: Cham, Switzerland, 2019; pp. 157–171. [Google Scholar] [CrossRef]
- Bi, J.; Yuan, H.; Duanmu, S.; Zhou, M.; Abusorrah, A. Energy-Optimized Partial Computation Offloading in Mobile-Edge Computing with Genetic Simulated-Annealing-Based Particle Swarm Optimization. IEEE Internet Things J. 2020, 8, 3774–3785. [Google Scholar] [CrossRef]
- Asif, M.; Khan, M.A.; Abbas, S.; Saleem, M. Analysis of Space & Time Complexity with PSO Based Synchronous MC-CDMA System. In Proceedings of the 2019 2nd International Conference on Computing, Mathematics and Engineering Technologies, Sukkur, Pakistan, 30–31 January 2019; pp. 1–5. [Google Scholar] [CrossRef]
- The Data Set of Solomn. Available online: http://web.cba.neu.edu/~msolomon/problems.htm (accessed on 25 May 2024).
- Du, P.; He, X.; Cao, H.; Garg, S.; Kaddoum, G.; Hassan, M.M. AI-Based Energy-Efficient Path Planning of Multiple Logistics UAVs in Intelligent Transportation Systems. Comput. Commun. 2023, 207, 46–55. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Reference | Energy Constraint | Dynamic Demand | Dynamic Wind |
|---|---|---|---|
| Campuzano [11], Sawadsitang [12], Xu [20], Huang [21] | Yes | Yes | No |
| Khamidehi [13], Han [16], Liu [17] | No | Yes | No |
| Khanda [14], Sorbelli [15], Liu [24], Cheng [32], Radzki [33] | Yes | No | Yes |
| Glick [18] | Yes | Yes | No |
| Huang [22], Cherif [23], Dorling [25], Abeywickrama [26], Cheng [27], Chen [28] | Yes | No | No |
| Funabashi [29] | No | No | No |
| Ito [30], Sorbelli [31], Hamdi [34], Peng [35] | No | No | Yes |
| This work | Yes | Yes | Yes |
| Notations | Definitions |
|---|---|
| The set of all nodes. | |
| The set of nodes of the time slice. | |
| Depot. | |
| Client locations waiting for further processing. | |
| Client locations that have been processed. | |
| A new need for a customer. | |
| Client locations that meet time window constraints. | |
| The coordinate of node i at time slice . | |
| Distance from node i to node j at time slice . | |
| Demand for deliveries at customer i. | |
| Demand for pickup at customer i. | |
| Earliest service window acceptable to customer i. | |
| Latest service time window acceptable to customer i. | |
| Penalty factor when UAV’s arrival time is earlier than the earliest acceptable service time window. | |
| Penalty factor when UAV’s arrival time is later than the latest service time window. | |
| L, R | The start and end times of the depot. |
| T | Depot working hours. |
| The set of time slices. | |
| The set of wind speed and direction time sequences. | |
| Sum of descent, ascent and hovering time of UAV u at customer location i at time slice s. | |
| The set of UAVs. | |
| Heading angle from node i to node j. | |
| Trajectory angle from node i to node j. | |
| Ground speed from node i to node j. | |
| Flight time from node i to node j. | |
| Fixed costs of UAV u. | |
| The payload from node i to node j. | |
| Time for UAV u to arrive at node j from node i. | |
| Q | The maximum payload of UAV. |
| The maximum power of UAV. | |
| Remaining power of UAV when it departs from node i to j. | |
| Flight time of UAV u from node i to node j in time slice s in time window t. | |
| Binary variable to indicate whether the delivery service between node i and node j is performed by UAV u. | |
| Binary variable to indicate whether the UAV u performs the next delivery service again after returning to the depot. |
| Customer Location Label | Marker | Marker |
|---|---|---|
| 1 | 4 | 1.17 |
| 2 | 1 | 3.34 |
| 3 | 3 | 6.56 |
| 4 | 2 | 11.49 |
| 5 | 3 | 1.89 |
| 6 | 1 | 5.82 |
| 7 | 4 | 9.60 |
| 8 | 3 | 10.98 |
| 9 | 2 | 7.87 |
| 10 | 4 | 8.14 |
| 11 | 2 | 4.71 |
| 12 | 1 | 2.05 |
| UAV Flights | Distribution Program |
|---|---|
| 1 | 0-12-2-6-0 |
| 2 | 0-11-9-4-0 |
| 3 | 0-5-3-8-0 |
| 4 | 0-1-10-7-0 |
| Parameters | Value |
|---|---|
| Empty weight | 100 kg |
| Maximum payload | 30 kg |
| Maximum charge | 1600 Wh |
| TAS | 20 m/s |
| Parameter | Parameter Symbol | Value |
|---|---|---|
| Particle swarm size | 500 | |
| Maximum number of iterations | 500 | |
| Initial inertia weight | 1 | |
| Inertia weight decay coefficient | 0.95 | |
| Cognitive coefficient | 1.5 | |
| Social coefficient | 2 | |
| Particle position upper limit | 4 | |
| Lower particle position limit | 1 | |
| Particle velocity upper limit | 50 | |
| Particle velocity lower limit | −50 | |
| Inferior solution mutation strategy threshold | N | 10 |
| Distribution Serial Number | Distribution Sequence | Average Loading Rate | Electricity Consumption |
|---|---|---|---|
| 1-1 | 0→26→40→0 | 41.11% | 302 |
| 1-2 | 0→33→9 →29→3 | 76.67% | 924.6 |
| 1-3 | 0→39→23→41 →53→22→0 | 88.67% | 993.39 |
| 1-4 | 0→21→4→25 →24→12→0 | 68.89% | 905.5 |
| 2-1 | 0→37→14→17 →45→18→0 | 83.33% | 1073.9 |
| 2-2 | 0→46→47→11 →36→49→8→0 | 50.95% | 1592.6 |
| 2-3 | 0→34→35→20 →32→50→57→0 | 52.22% | 1217 |
| 3-1 | 0→1→30→10 →19→31→0 | 63.33% | 968.32 |
| 3-2 | 0→6→42→15 →43→2→56→0 | 63.89% | 889.49 |
| 3-3 | 0→27→0 | 10% | 90.09 |
| 4-1 | 0→48→7→5 →13→51→0 | 60% | 904.38 |
| 4-2 | 0→38→44 →16→52→0 | 60.83% | 905.51 |
| 4-3 | 0→28→54→0 | 25% | 114.81 |
| Label | Type | a | b | Time | l | r | d | p |
|---|---|---|---|---|---|---|---|---|
| 51 | pickup | 630 | 720 | 5 | 9 | 115 | 0 | 9 |
| 52 | 1470 | 1740 | 164 | 174 | 227 | 0 | 5 | |
| 53 | 1110 | 930 | 172 | 207 | 245 | 0 | 3 | |
| 54 | delivery | 360 | 720 | 102 | 145 | 189 | 7 | 0 |
| 55 | 1590 | 360 | 261 | 293 | 346 | 3 | 0 | |
| 56 | both | 810 | 1290 | 67 | 87 | 150 | 6 | 3 |
| 57 | 1350 | 1960 | 296 | 361 | 431 | 4 | 7 |
| Label | Type | a | b | Time | l | r | d | p |
|---|---|---|---|---|---|---|---|---|
| 28 | (l,r) | 1230 | 1110 | 213 | 320 | 421 | 7 | 7 |
| 41 | (a,b) | 1260 | 210 | 103 | 198 | 255 | 10 | 7 |
| 50 | (d,p) | 1410 | 1410 | 67 | 274 | 321 | 6 | 9 |
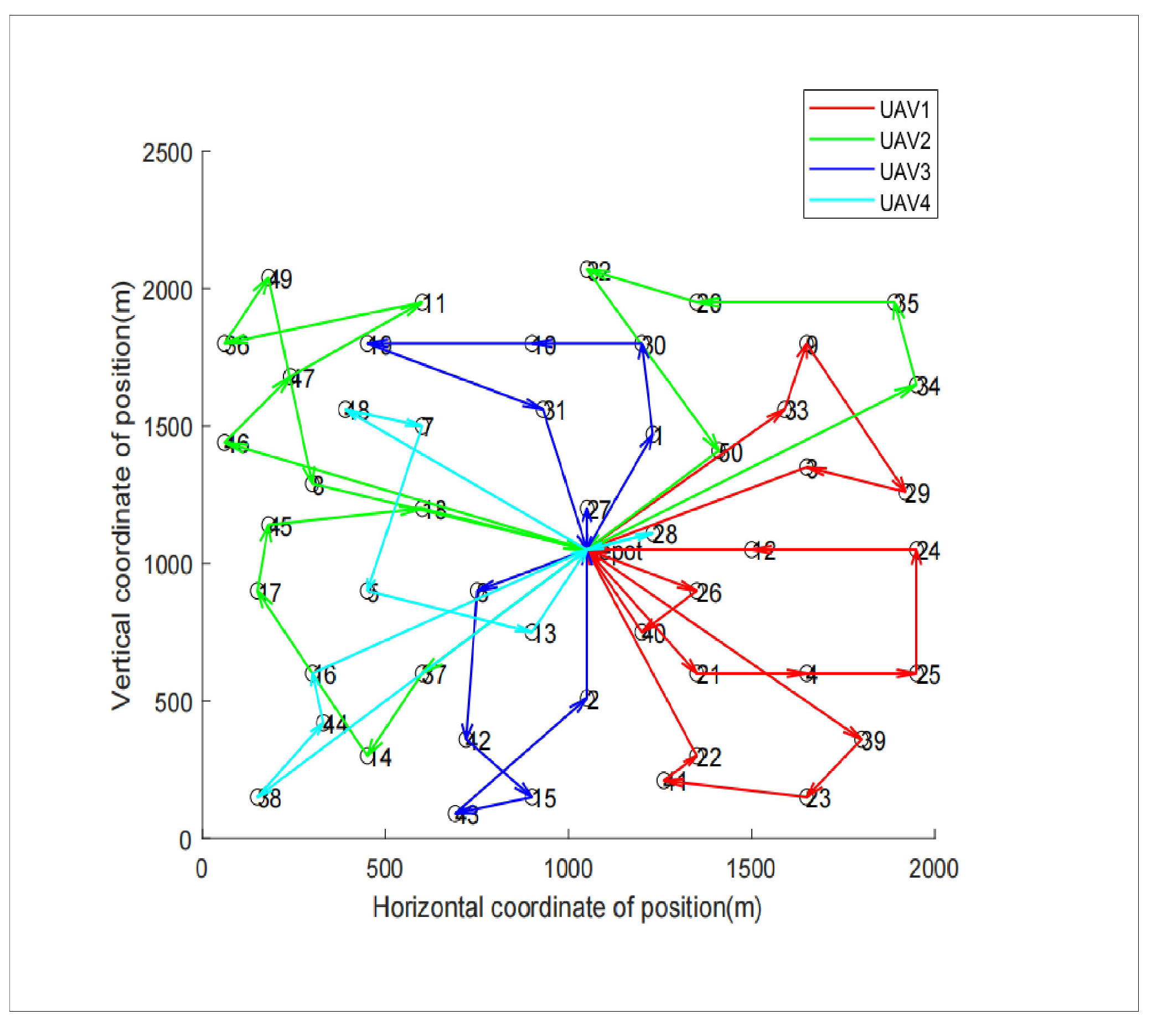
| UAV Serial Number | Distribution Serial Number | Distribution Sequence |
|---|---|---|
| 1 | 1-1 | 0→26→40→0 |
| 1-2 | 0→33→9→29→3 | |
| 1-3 | 039→23→41 →53→22→0 | |
| 1-4 | 0→21→4→ 25→24→12→0 | |
| 2 | 2-1 | 0→37→14 →17→45→18→0 |
| 2-2 | 0→46→47→ 11→36→49→8→0 | |
| 2-3 | 0→34→35→20 →32→50→57→0 | |
| 3 | 3-1 | 0→1→30→ 10→19→31→0 |
| 3-2 | 0→6→42→ 15→43→2→56→0 | |
| 3-3 | 0→27→0 | |
| 4 | 4-1 | 0→48→7→ 5→13→51→0 |
| 4-2 | 0→38→44→ 16→52→0 | |
| 4-3 | 0→28→54→0 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tang, G.; Xiao, T.; Du, P.; Zhang, P.; Liu, K.; Tan, L. Improved PSO-Based Two-Phase Logistics UAV Path Planning under Dynamic Demand and Wind Conditions. Drones 2024, 8, 356. https://doi.org/10.3390/drones8080356
Tang G, Xiao T, Du P, Zhang P, Liu K, Tan L. Improved PSO-Based Two-Phase Logistics UAV Path Planning under Dynamic Demand and Wind Conditions. Drones. 2024; 8(8):356. https://doi.org/10.3390/drones8080356
Chicago/Turabian StyleTang, Guangfu, Tingyue Xiao, Pengfei Du, Peiying Zhang, Kai Liu, and Lizhuang Tan. 2024. "Improved PSO-Based Two-Phase Logistics UAV Path Planning under Dynamic Demand and Wind Conditions" Drones 8, no. 8: 356. https://doi.org/10.3390/drones8080356
APA StyleTang, G., Xiao, T., Du, P., Zhang, P., Liu, K., & Tan, L. (2024). Improved PSO-Based Two-Phase Logistics UAV Path Planning under Dynamic Demand and Wind Conditions. Drones, 8(8), 356. https://doi.org/10.3390/drones8080356