1. Introduction
Over the past few years, researchers have increasingly focused on the cooperative control of multiple unmanned aerial vehicles (UAVs) formations, driven by advancements in UAV technology and the broadening scope of application scenarios. Compared to individual UAVs, UAV formation systems offer significant advantages in coordinated reconnaissance, area search, and disaster rescue [
1,
2,
3]. However, the complexity introduced by factors such as external obstacles and environmental uncertainties makes the cooperative control of multi-UAV formations more challenging than controlling individual unmanned aircraft [
4]. In practical applications, multi-UAV formation systems must perform tasks such as formation transformation and obstacle avoidance in complex three-dimensional (3D) dynamic environments. Formation transformation enables the system to adapt to various mission requirements, thereby enhancing its adaptability and flexibility. Meanwhile, obstacle avoidance is essential to guaranteeing the system’s safe and efficient operation in dynamic environments, particularly to prevent collisions with obstacles or other vehicles during flight [
5,
6,
7,
8]. These tasks have an immediate impact on the system’s flexibility, safety, and efficiency, which raises the bar for formation control technology.
Establishing a suitable formation control model is essential for multi-UAV formation control [
9,
10]. The model should reflect the adaptability of the flight formation while ensuring stability and resistance to interference in the formation flight control. Existing control structures for UAV formations aim to address various practical challenges. Key methodologies include the leader–follower method [
11], artificial potential field (APF) method [
12], behavioral decomposition method [
13], and virtual structure method [
14]. Chen et al. [
15] recently presented a feature modeling-based master–slave UAV formation flight control technique. This method establishes the positional relationship model between virtual slaves and leaders through trajectory tracking and positional dynamic fitting. Xu et al. [
16] developed a paradigm for distributed robust tracking control in quadrotor formations. Zhang et al. [
17] developed a control system for time-varying formation tracking for a quadrotor UAV using a consistency-based approach. Previous studies primarily focused on quadrotor formations in two-dimensional or static environments. However, fixed-wing UAV formation systems face unique control challenges and characteristics in complex 3D environments.
Formation transformation and collision avoidance are central topics in UAV formation flight research [
6,
7,
8]. Given its complexity, designing a robust controller is crucial to ensuring that the UAV maintains both the desired position and a safe distance [
18,
19]. Research on formation transformation and obstacle avoidance control for multi-UAV formation systems has made significant strides in recent years. A unique probabilistic roadmap (PRM) navigation technique for nonlinear quadcopters was suggested by Farooq [
20], created especially to deal with the difficulty of changing quadcopter formations following dynamic obstacle avoidance. Li et al. [
21] examined group obstacle avoidance methods for dynamic agents of both first and second orders. They proposed an algorithm for avoiding obstacles that does not require measurements of first-order dynamic agent velocities, which is especially effective when the percentage of intelligent agents that are able to detect barrier information is fixed. Okechi Onuoha thoroughly investigated the formation maneuvering control of multi-intelligent agents with triple integral dynamics that take into account parameters for sampling data and continuous time [
22]. In terms of obstacle avoidance algorithms, cooperative obstacle avoidance solutions frequently employ the APF approach. APF [
23,
24,
25] is a commonly used technique for obstacle avoidance in UAV formation. This approach computes the combined force guiding path-planning in real-time by using repulsive and gravitational forces. However, without a well-designed potential function, the APF algorithm may lead to local optimal solutions, resulting in the UAV encountering the local minima phenomenon. Zhu et al. [
26] introduced a 3D UAV collision avoidance system using a modified artificial potential field (MAPF). The MAPF technique is suggested in a coordinate system with restrictions in order to isolate the decomposed forces from the MAPF method with particular physical limitations, therefore addressing the drawbacks of the conventional APF approach.
In summary, the transition from single UAV flight to multi-UAV formation flight brings many challenges, such as maintaining formation flight in complex environments, changing formations when performing tasks, and avoiding collisions. To solve these problems, researchers began to explore the use of fuzzy control algorithms in formation control. Fuzzy control is a method based on fuzzy logic that can handle uncertainties and nonlinear problems in the system. In formation flight control, fuzzy control is used to design robust controllers that ensure UAVs are in the desired position and maintain a safe distance. Nair et al. proposed a fuzzy sliding mode control method that uses adaptive adjustment technology to control the formation flight of spacecraft [
27]. This method maintains the stability of formation flight in uncertain environments through adaptive adjustment technology. Compared with traditional sliding mode control methods, this method better handles uncertainties and disturbances in the system. Ding [
28] applied fuzzy logic control to achieve autonomous formation flight capabilities for small UAV systems. This method enables UAVs to autonomously change formations and avoid obstacles when performing tasks through fuzzy logic control. Compared with other formation flight control methods, this method has stronger robustness in dealing with nonlinear problems and uncertainties. Pang R. et al. proposed a multi-UAV formation maneuvering control method based on a Q-learning fuzzy controller [
29]. This method enables multiple UAVs to perform efficient maneuvering control in formation flight through a Q-learning fuzzy controller. Compared with traditional maneuvering control methods, this method better handles the interaction and coordination problems between UAVs. Mobarez et al. proposed a fixed-wing UAV formation flight method based on an adaptive neuro-fuzzy inference system [
30]. This method maintains the formation flight of fixed-wing UAVs in complex environments through an adaptive neuro-fuzzy inference system. Teixeira et al. proposed a quaternary fuzzy control method for UAV formation flight [
31]. This method maintains the formation flight of UAVs in complex environments through fuzzy control. Tran et al. [
32] proposed a distributed formation control method using a fuzzy self-adjusting strict negative imaginary consensus controller for aerial robots. Compared with reinforcement learning fuzzy control methods, this method enables aerial robots to perform effective control in formation flight through fuzzy self-adjustment. Fuzzy logic effectively handles uncertainty and nonlinear problems in systems. Yu et al. [
33] introduced adaptive theory in the fuzzy control of quadcopter formations, enhancing the system’s adaptability and control accuracy. In control design, Li et al. [
34] applied fuzzy logic systems to approximate nonlinear functions, considering both the system state and the state rate, and employed adaptive optimization for formation control problems.
The above research shows that the application of fuzzy control in formation flight control has made significant progress. However, the application of fuzzy control in formation flight control still faces some challenges, such as selecting the parameters of fuzzy control and dealing with the computational complexity of fuzzy control. Therefore, the application of fuzzy control in formation flight control continues to have great research value. First of all, there is the parameter selection problem of fuzzy control. Traditional fuzzy control requires significant time and effort in selecting quantization factors and scaling factors, and the parameters are not very versatile. Selecting appropriate fuzzy control parameters is essential to ensuring the stability of UAV formation flight. This requires a deep understanding of the UAV dynamic model, flight environment, and mission requirements. Secondly, there is the problem of the computational complexity of fuzzy control. Fuzzy control algorithms need to process a large number of fuzzy rules and fuzzy reasoning, which can lead to high computational complexity. However, with the development of computing technology, this problem is gradually being solved.
To address the identified challenges, this study explores the control of fixed-wing nonlinear UAV formation flight, with a focus on formation changes and obstacle avoidance. It proposes a formation adaptive factor fuzzy controller along with an enhanced APF method. To begin, we develop a model of formation space relative motion, derived from the aircraft’s six degrees of freedom (6-DOF) nonlinear framework, presented as a system of equations. Secondly, the nonlinear dynamic inversion (NDI) method is employed as an independent controller to decouple the subsystems. Subsequently, an adaptive factor is integrated into the fuzzy control system to design an adaptive formation controller, enhancing control efficiency and performance. Thirdly, we introduce a new repulsive potential function that improves the conventional APF method, thereby advancing the obstacle avoidance capabilities in formation flight. Finally, we conduct a series of simulations in the devised scenario. The results affirm the superiority of our proposed method, significantly enhancing control performance and addressing the limitations of traditional approaches. Compared to feedback linearization or backstepping, our proposed adaptive factor fuzzy control method demonstrates lower computational complexity and higher efficiency. Additionally, compared to neural network control, our method, through the introduction of fuzzy logic, can effectively handle system uncertainty and external disturbances, offering better robustness. The following is a summary of the primary contributions of our research:
Unlike most studies that focus on simpler quadrotor formations and 3-DOF aircraft dynamics models, this paper develops a more comprehensive formation space relative motion model using a fixed-wing single-aircraft 6-DOF model. This approach integrates the full 6-DOF dynamics of each UAV, thus providing a more accurate and realistic simulation of air maneuvering, and it improves the applicability of our approach.
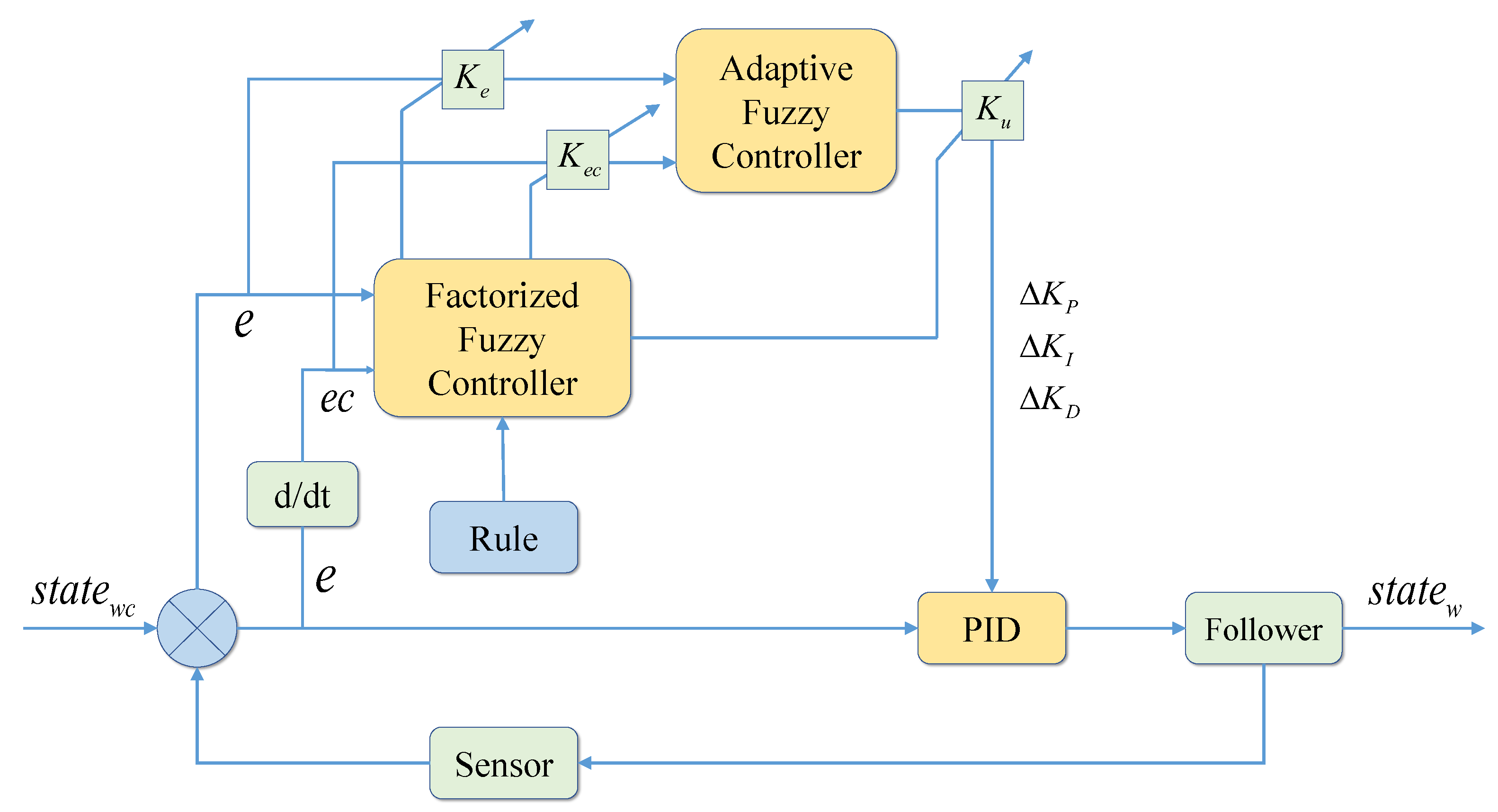
Since the traditional fuzzy control selects fixed values for quantization and proportionality factors, and the selection process is time-consuming and blind, the selected quantization and proportionality factors may no longer be suitable when the formation control system is subjected to large perturbations. We improve the formation fuzzy control system, which is specially designed for the complexity of 6-DOF vehicle dynamics, and cleverly construct the appropriate quantization and scaling factor forms. At the same time, we summarize the past experience of experts to establish the corresponding fuzzy rules, and use fuzzy algorithms to realize the factor adaptive adjustment, enhance the parameter generalization ability, and be able to dynamically adjust the control parameters in real-time so as to enhance the stability and adaptability of the formation system under various flight conditions. We establish quantization and proportional factor fuzzy rules to integrate the adaptive factors into the traditional fuzzy control that usually relies on static rules, which makes the traditional fuzzy controllers more adaptive, solves the problem that the quantization and proportional factors need to be selected in a time-consuming and laborious way, enhances the ability of parameter generalization, and improves the control efficiency and performance.
The traditional artificial APF can achieve good obstacle avoidance results in relatively simple environments with a small number of formation UAVs, but in relatively complex environments, there is the problem of local minima to the extent that the target is unreachable. We have redesigned the repulsive potential function to improve the APF method by introducing the repulsive force adjustable parameter and the decay rate dynamic adjustment parameter. As a result, the UAV can flexibly adjust its flight path according to the proximity of obstacles, which greatly improves the collision avoidance ability of the UAV in complex dynamic environments.
Previous research typically reduces the formation flight environment to two-dimensional planes and static obstacles. In contrast, this paper develops a more complex 3D spatial environment featuring multiple static and dynamic obstacles, presenting greater challenges to controller performance.
This paper is structured as follows:
Section 2 models the spatial relative motion of a fixed-wing nonlinear UAV formation.
Section 3 introduces the formation adaptive factor fuzzy controller and designs the APF method with an improved repulsive potential function. To demonstrate the effectiveness of the control mechanism,
Section 4 provides simulation data along with a detailed build of the simulation environment.
Section 5 summarizes the main conclusions of the paper and suggests directions for further research.
2. Formation Model
The establishment of a single aircraft model serves as the foundation for formation control. It involves creating a flight simulation system for the aircraft using mathematical models encompassing kinematics, dynamics, aerodynamics, and engine characteristics [
35]. In a 3D dynamic environment, UAV formations are required to execute complex tasks involving formation changes and obstacle avoidance. The traditional linearized aircraft model is inadequate for accurately describing aircraft motion under such conditions. This study provides a body-axis nonlinear model of fixed-wing aircraft with 6-DOF [
36]. The fixed-wing UAV 6-DOF nonlinear dynamic model consists of twelve state variables: velocity V, angle of attack
, sideslip angle
, roll angle velocity
p, pitch angle velocity
q, yaw angular velocity
r, track roll angle
, track inclination angle
, track yaw angle
, and the coordinates
x,
y,
z of the center of mass projected onto the horizontal plane.
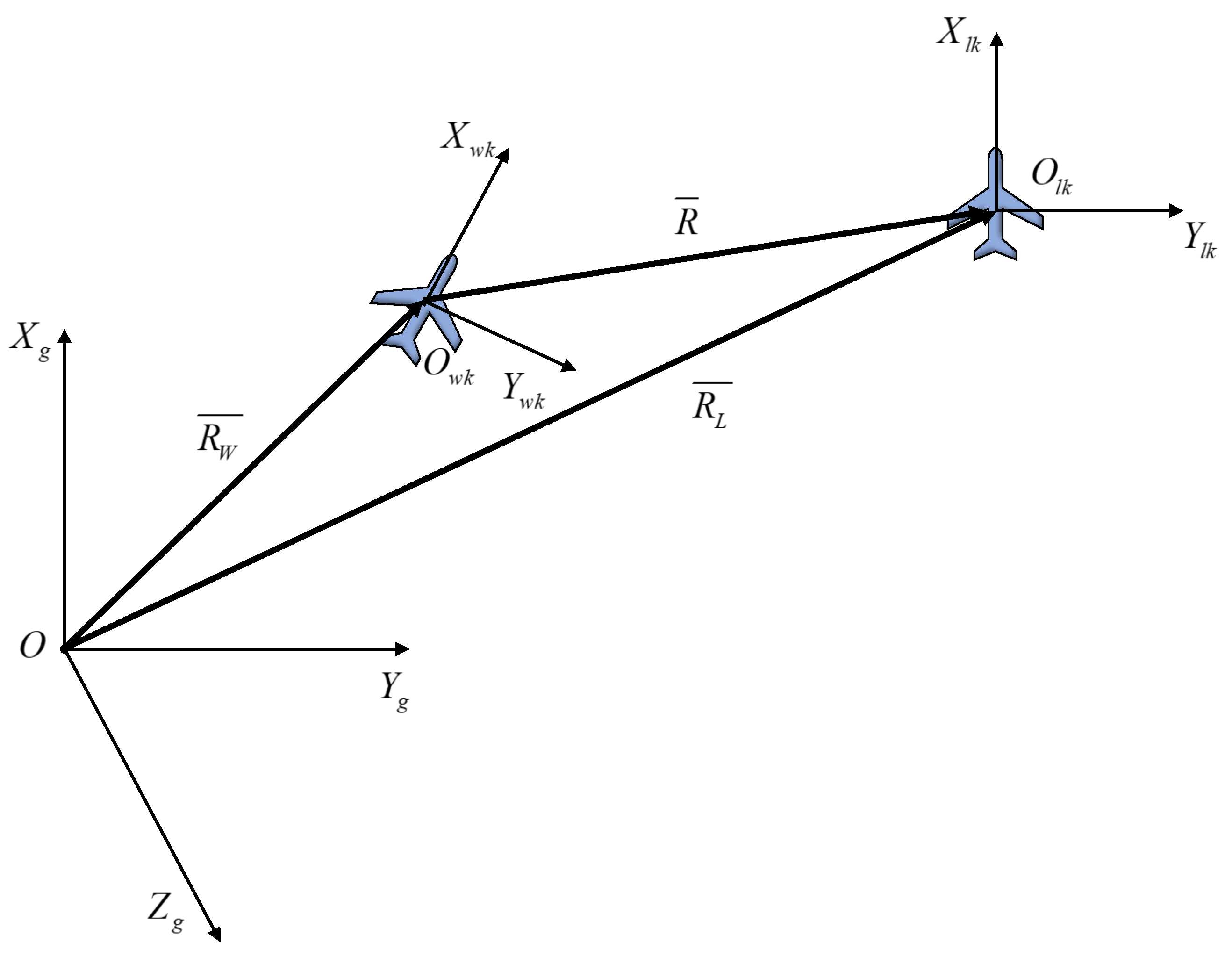
In the context of multi-UAV cooperative control, a mere amalgamation of individual UAVs cannot fully exploit its inherent benefits. Effectively processing complex tasks necessitates some form of integration [
37,
38]. The formation control framework in this study is established using the leader–follower approach, drawing on both the flight mission of the research subject and practical engineering expertise. Maintaining the relative distance between the leader and following UAVs is an essential component of this design. Hence, this paper develops their relative motion model in 3D space, illustrated in
Figure 1, showing the connection between the leader’s and follower’s position vectors in the ground coordinate system.
The following equation can be derived from the relationships within the coordinate system, shown as
Differentiating the aforementioned equation yields
where
.
Continuing the analysis and transformation of the coordinate matrix results in the following equations
In summary, by substituting Equations (
3)–(
6) into Equation (
2), we can derive the relationship of velocities in the ground coordinate system as depicted in the equation below
Consequently, the equation that follows can be derived
The following equation can be derived based on the previously mentioned 6-DOF nonlinear equation of aircraft
Substituting Equation (
9) into Equation (
8) yields the equation describing the relative motion between the leader and the follower within the track coordinate system as illustrated in the equation below
5. Conclusions
In this paper, we design a formation adaptive factor fuzzy controller, distinct from traditional fuzzy control systems that rely on static rules. This method integrates adaptive factors to dynamically adjust control parameters based on real-time flight data, thereby enhancing UAV responsiveness to environmental changes and dynamic obstacles. Additionally, we develop an improved APF method, wherein a new repulsive potential function flexibly adjusts based on the aircraft’s proximity to obstacles, significantly enhancing the collision avoidance capabilities of UAVs in dynamic environments. Additionally, this paper integrates multi-UAV formations with 6-DOF modeling, incorporating the full 6-DOF dynamics of each UAV. This approach offers a more accurate and realistic simulation of aerial maneuvers compared to conventional 3-DOF models. Therefore, this study develops a fixed-wing aircraft simulation model and a formation control framework using nonlinear dynamic inverse control, constructs a complex 3D environment with static and dynamic obstacles, and assesses the performance of PID, fuzzy, and adaptive factorial fuzzy controllers during formation flight.
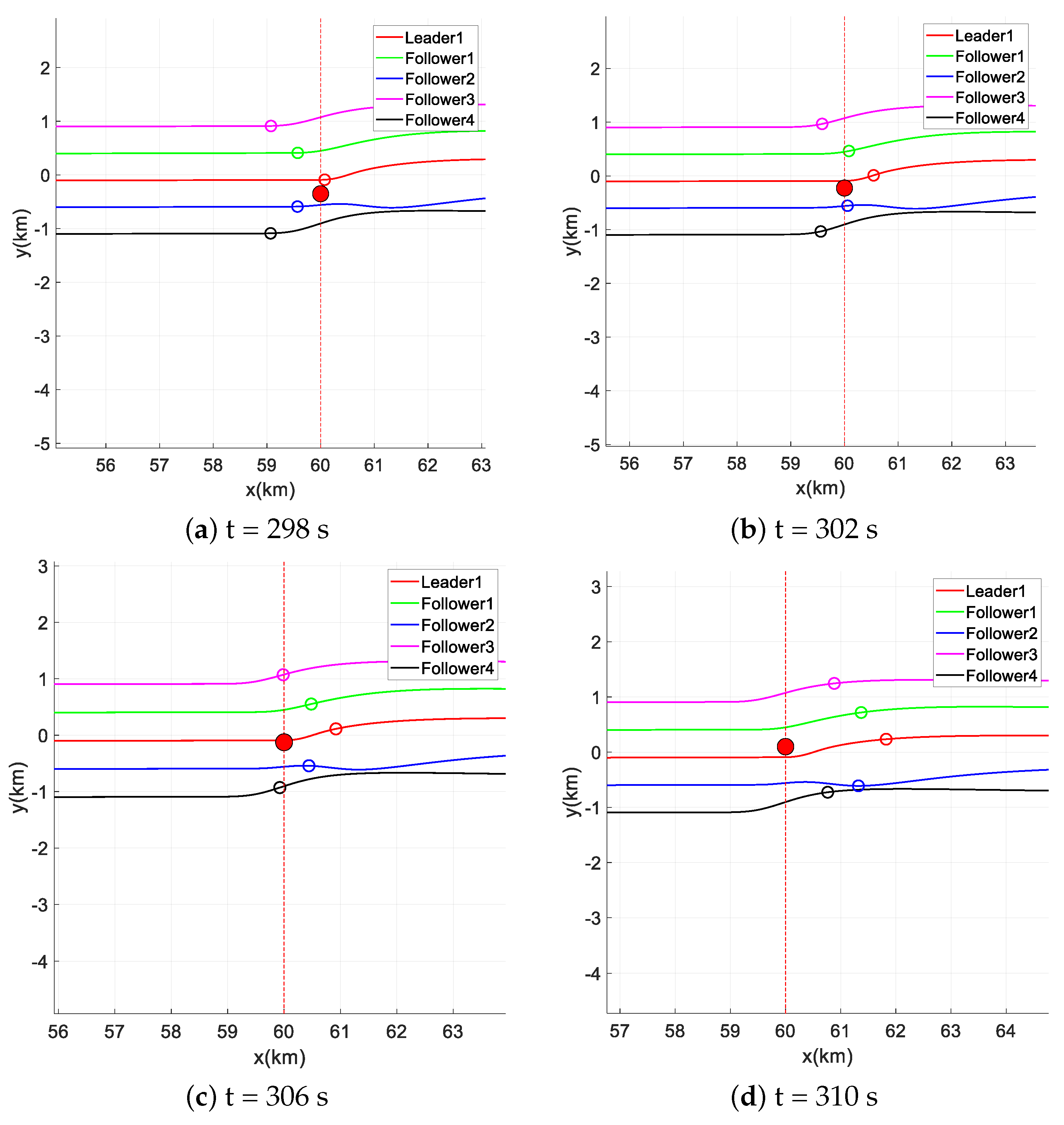
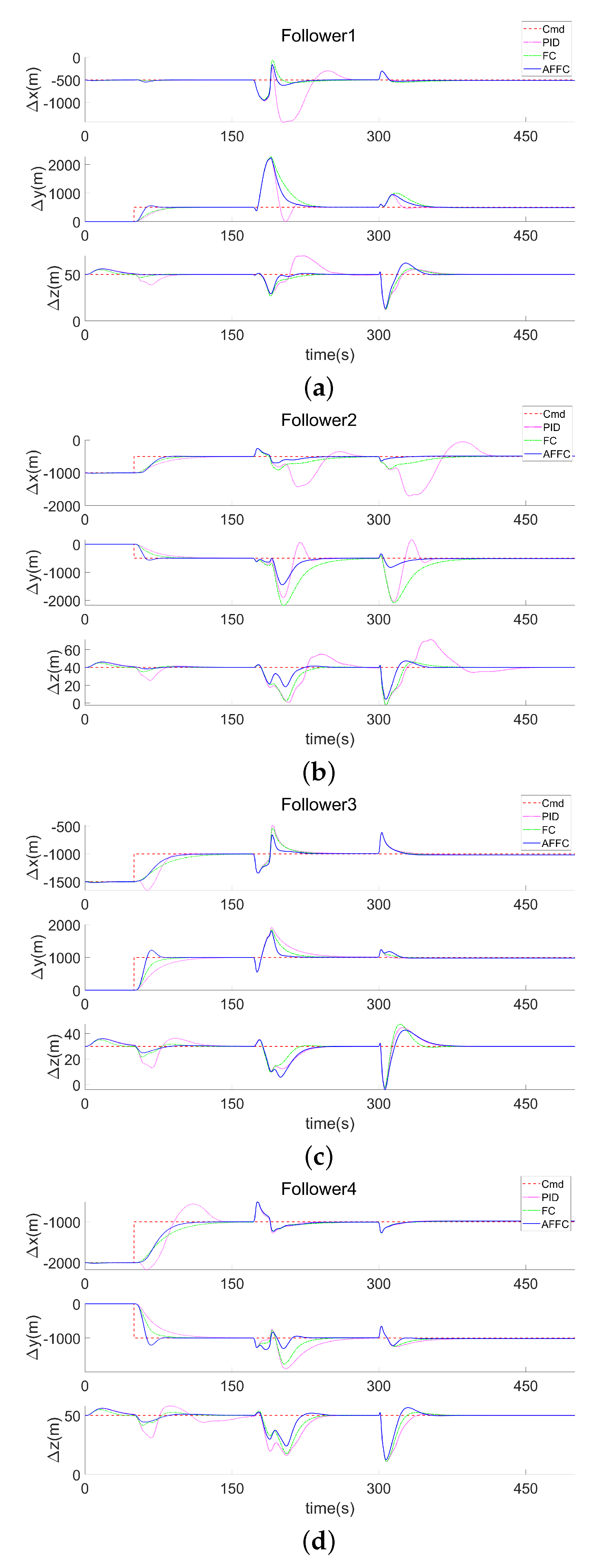
In the simulation scenario described above, the traditional PID control and fuzzy control methods struggle to adapt to the complex formation flight environment due to fixed control parameters and a complex selection process. To address these issues, a multi-channel adaptive factor fuzzy controller for followers is designed, and the APF method is incorporated to enhance the repulsive force potential function, preventing the aircraft from becoming stuck in local minima.The outcomes of the simulation show that multi-UAV formations can effectively perform formation transformations and obstacle-avoidance flights in a 3D dynamic environment, showcasing good aircraft flight performance and strong formation robustness.
Future research will explore the heterogeneous case of formation UAVs, which may include formations comprising multiple classes of aircraft with varying performance characteristics. In addition, the existing formation flight control system will be tested and improved in more complex flight environments, including the effects of aerodynamic perturbations in close-range formation flight, the effects of control input noise, and the challenges of sudden threatening obstacles in the air, in order to improve the adaptability and robustness of the formation controller. Detailed simulations of the improved APF method are also necessary to ascertain its operational limits.














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}