
Rapid Initialization Method of Unmanned Aerial Vehicle Swarm Based on VIO-UWB in Satellite Denial Environment


Abstract
1. Introduction
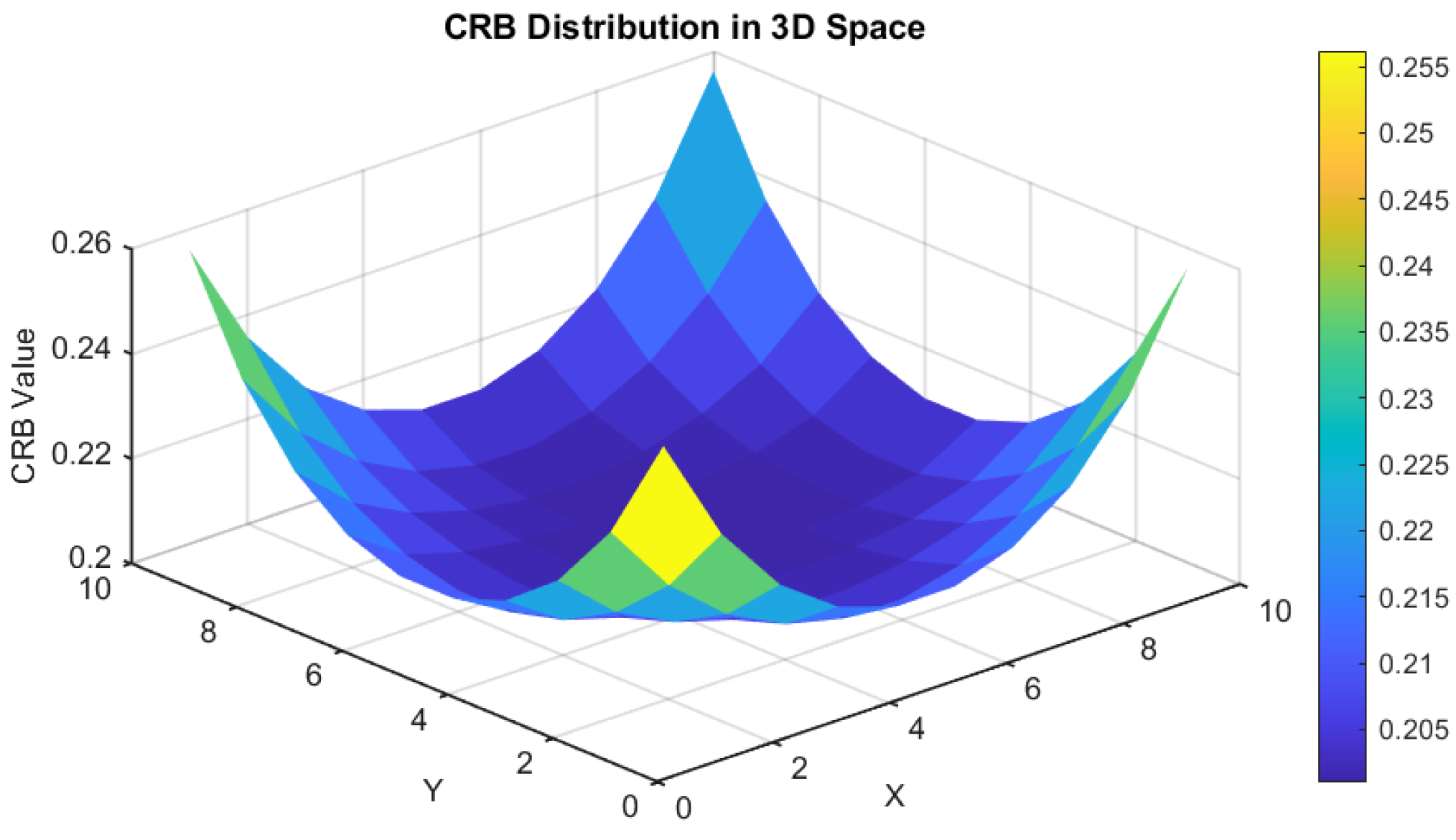
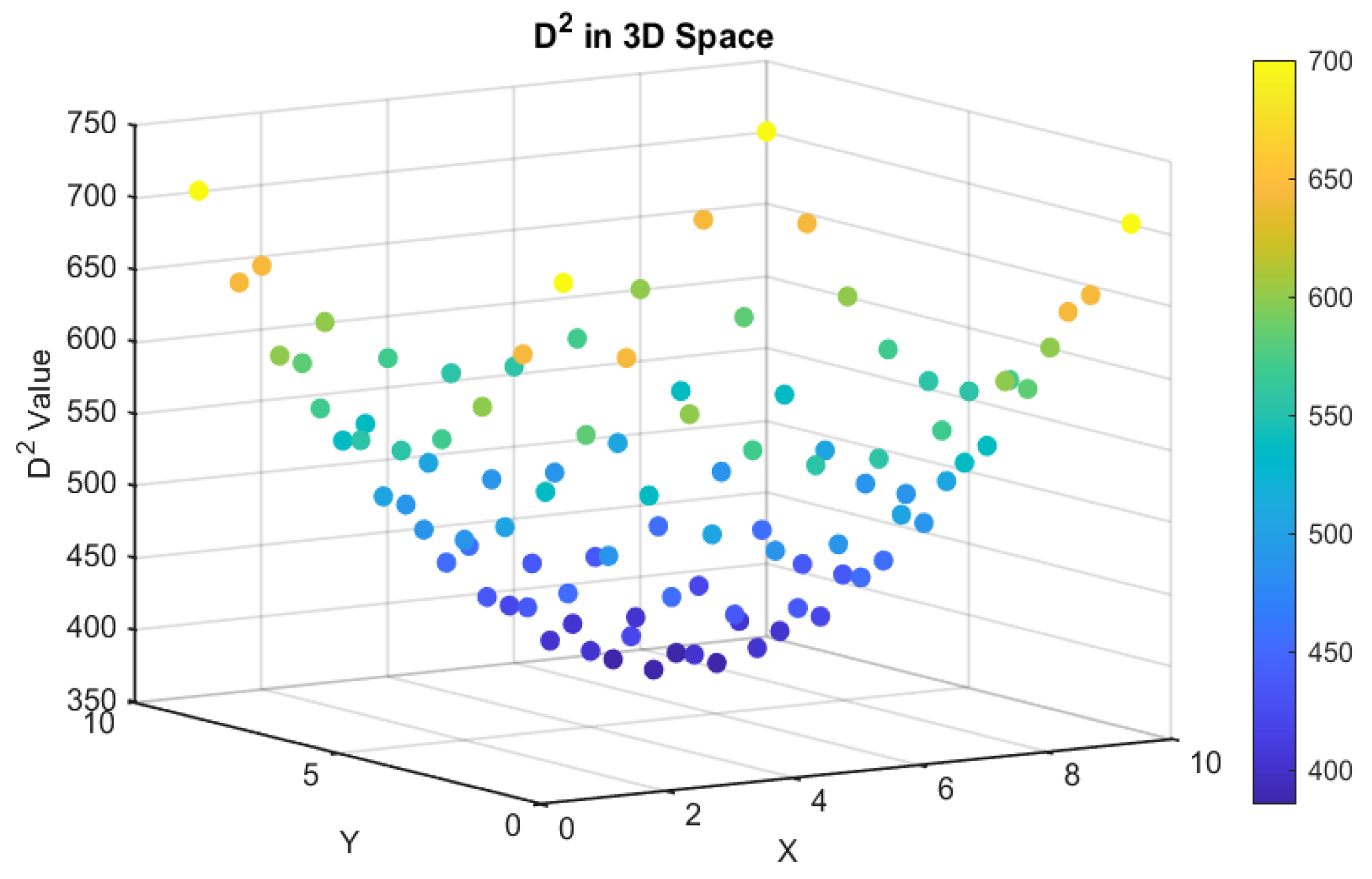
- To ensure the selection of anchor nodes as close to the CRLB as possible, this paper proposes an innovative marginal evaluation method based on distance. By leveraging prior information about mutual distances artfully, the optimal anchor nodes are selected, ensuring a rational spatial distribution. Theoretical analysis is conducted to validate the optimal selection of anchor nodes, providing solid proof for the proposed innovative method.
- It introduces groundbreaking constraints for multi-member estimation and incorporates judgment to identify an optimal coordinate recovery time window, ensuring effective and rapid estimation of the relative transformation relationships among multiple coordinate systems. The addressed optimization problem exhibits high robustness and precision. Our innovative algorithm simplifies and incorporates the state-of-the-art SMACOF (Scaling by Majorizing a Complicated Function) algorithm to help achieve rapid solutions, significantly enhancing the efficiency of swarm initialization.
- A novel two-stage initialization method for more than four UAVs is proposed, verified by theoretical simulation and real-world testing, demonstrating its superior performance in satellite-denied environments. Experimental results confirm that this innovative method effectively addresses the UAV swarm initialization problem, providing a reliable technical guarantee for UAV applications in complex environments.
2. Materials and Methods
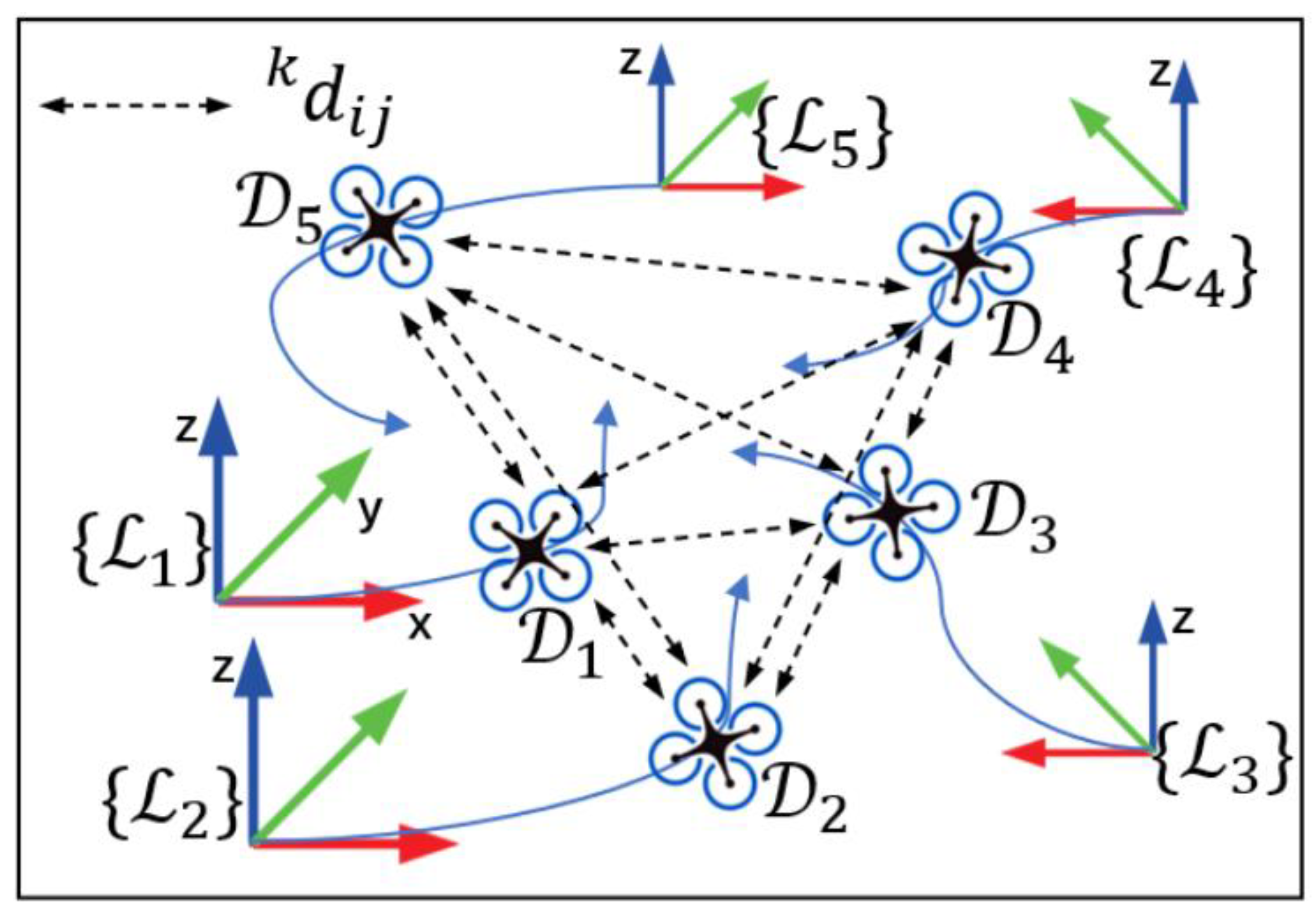
2.1. Problem Formulation
2.2. Anchor Node Configuration
2.3. Non-Convex Optimization Problems
2.4. Multi-Dimensional Scale Transformation
2.5. Fast Swarm Collaborative Positioning Algorithm
| Algorithm 1. Cooperative Increasing SAM Algorithm |
| ; 1: FIM Detection 3: Anchor Selection 4: Select anchor nodes based on the FIM detection results by using (11). 5: Improved QCQP 6: Determine the translation and rotation between all anchor nodes by using (28) 7: Quick SMACOF 9: Relative to Absolute Transformation |
3. Results
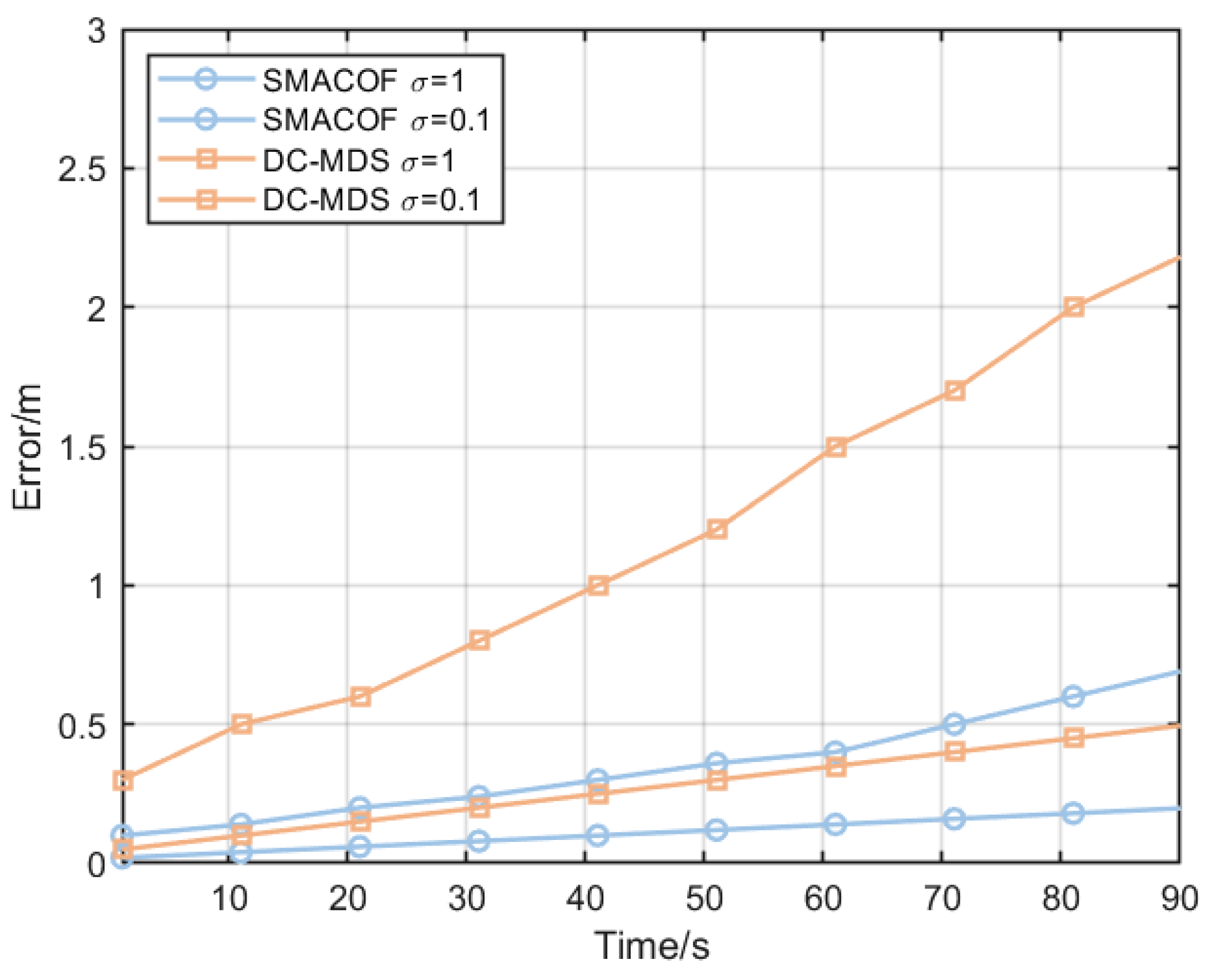
3.1. Simulations
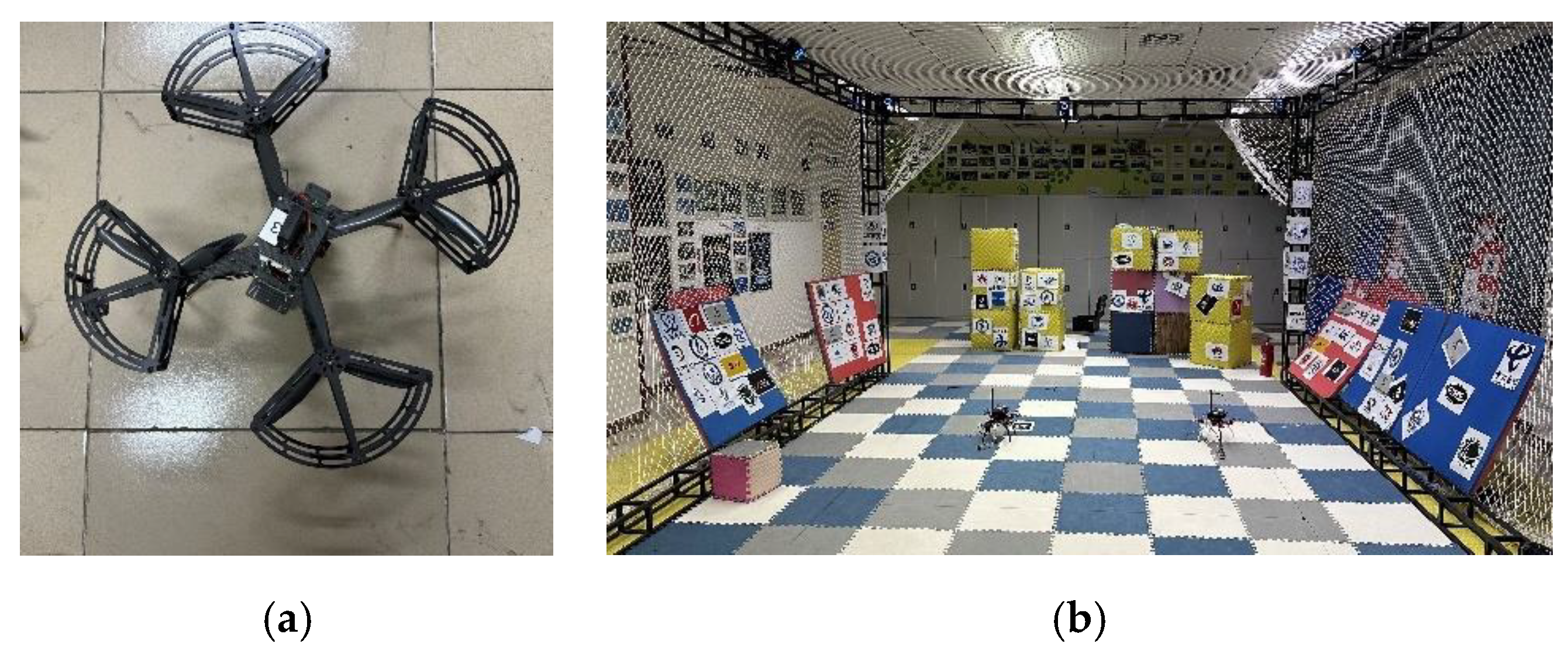
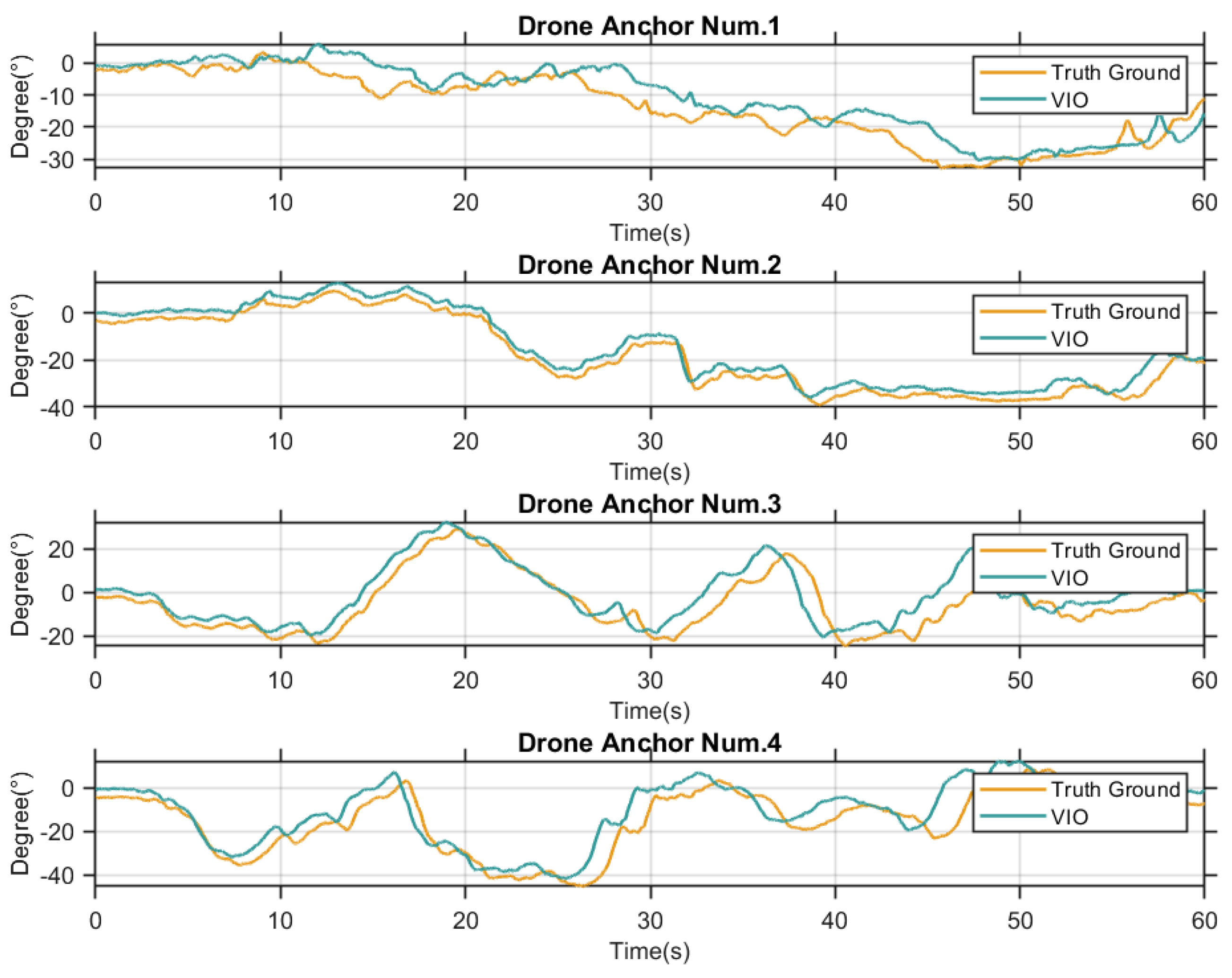
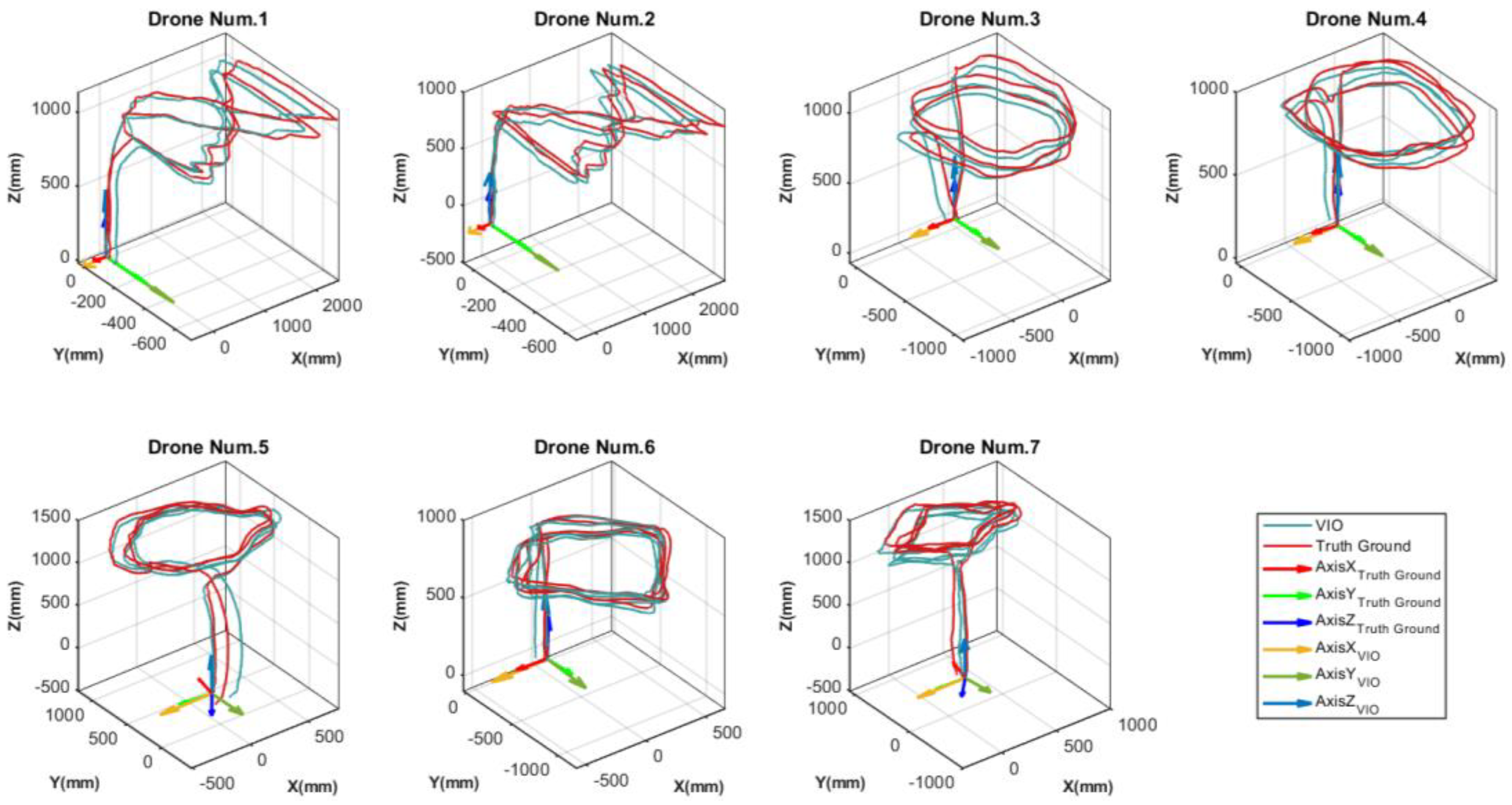
3.2. Real-World Experiments
4. Discussion
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Appendix A
Appendix B
References
- Abdelkader, M.; Güler, S.; Jaleel, H.; Shamma, J.S. Aerial Swarms: Recent Applications and Challenges. Curr. Robot. Rep. 2021, 2, 309–320. [Google Scholar] [CrossRef] [PubMed]
- Peksa, J.; Mamchur, D. A Review on the State of the Art in Copter Drones and Flight Control Systems. Sensors 2024, 24, 3349. [Google Scholar] [CrossRef]
- Chandran, I.; Vipin, K. Multi-UAV Networks for Disaster Monitoring: Challenges and Opportunities from a Network Perspective. Drone Syst. Appl. 2024, 12, 1–28. [Google Scholar]
- Fascista, A. Toward integrated large-scale environmental monitoring using WSN/UAV/Crowdsensing: A review of applications, signal processing, and future perspectives. Sensors 2022, 22, 1824. [Google Scholar] [CrossRef]
- Ming, R.; Jiang, R.; Luo, H.; Lai, T.; Guo, E.; Zhou, Z. Comparative Analysis of Different UAV Swarm Control Methods on Unmanned Farms. Agronomy 2023, 13, 2499. [Google Scholar] [CrossRef]
- Radoglou-Grammatikis, P.; Sarigiannidis, P.; Lagkas, T.; Moscholios, I. A Compilation of UAV Applications for Precision Agriculture. Comput. Netw. 2020, 172, 107148. [Google Scholar] [CrossRef]
- Castrillo, V.U.; Manco, A.; Pascarella, D.; Gigante, G. A review of counter-UAS technologies for cooperative defensive teams of drones. Drones 2022, 6, 65. [Google Scholar] [CrossRef]
- Li, Z.; Jiang, C.; Gu, X.; Xu, Y.; Cui, J. Collaborative positioning for swarms: A brief survey of vision, LiDAR and wireless sensors based methods. Def. Technol. 2024, 33, 475–493. [Google Scholar] [CrossRef]
- Yang, B.; Yang, E. A survey on radio frequency based precise localisation technology for UAV in GPS-denied environment. J. Intell. Robot. Syst. 2021, 103, 38. [Google Scholar] [CrossRef]
- Lin, J.; Wang, Y.; Miao, Z.; Zhong, H.; Fierro, R. Low-complexity control for vision-based landing of quadrotor UAV on unknown moving platform. IEEE Trans. Ind. Inform. 2021, 18, 5348–5358. [Google Scholar] [CrossRef]
- Vödisch, N.; Unal, O.; Li, K.; Van Gool, L.; Dai, D. End-to-end optimization of LiDAR beam configuration for 3D object detection and localization. IEEE Robot. Autom. Lett. 2022, 7, 2242–2249. [Google Scholar] [CrossRef]
- Li, J.; Bi, Y.; Li, K.; Wang, K.; Lin, F.; Chen, B.M. Accurate 3D localization for MAV swarms by UWB and IMU fusion. In Proceedings of the 2018 IEEE 14th International Conference on Control and Automation (ICCA), Anchorage, AK, USA, 12–15 June 2018; pp. 100–105. [Google Scholar]
- Rubina, A.; Artemenko, O.; Andryeyev, O.; Mitschele-Thiel, A. A novel hybrid path planning algorithm for localization in wireless networks. In Proceedings of the 3rd Workshop on Micro Aerial Vehicle Networks, Systems, and Applications, New York, NY, USA; 2017; pp. 13–16. [Google Scholar]
- Retscher, G. Fundamental concepts and evolution of Wi-Fi user localization: An overview based on different case studies. Sensors 2020, 20, 5121. [Google Scholar] [CrossRef] [PubMed]
- Zhang, J.; Wang, X.; Yu, Z.; Lyu, Y.; Mao, S.; Periaswamy, S.C.; Patton, J.; Wang, X. Robust RFID based 6-DoF localization for unmanned aerial vehicles. IEEE Access 2019, 7, 77348–77361. [Google Scholar] [CrossRef]
- Tiemann, J.; Wietfeld, C. Scalable and precise multi-UAV indoor navigation using TDOA-based UWB localization. In Proceedings of the 2017 International Conference on Indoor Positioning and Indoor Navigation (IPIN), Sapporo, Japan, 18–21 September 2017; pp. 1–7. [Google Scholar]
- Liu, J.; Pu, J.; Sun, L.; He, Z. An approach to robust INS/UWB integrated positioning for autonomous indoor mobile robots. Sensors 2019, 19, 950. [Google Scholar] [CrossRef] [PubMed]
- Wang, R.; Deng, Z. Co-Operatively Increasing Smoothing and Mapping Based on Switching Function. Appl. Sci. 2024, 14, 1543. [Google Scholar] [CrossRef]
- Tong, P.; Yang, X.; Yang, Y.; Liu, W.; Wu, P. Multi-UAV collaborative absolute vision positioning and navigation: A survey and discussion. Drones 2023, 7, 261. [Google Scholar] [CrossRef]
- Schmuck, P.; Ziegler, T.; Karrer, M.; Perraudin, J.; Chli, M. Covins: Visual-inertial slam for centralized collaboration. In Proceedings of the 2021 IEEE International Symposium on Mixed and Augmented Reality Adjunct (ISMAR-Adjunct), Bari, Italy, 4–8 October 2021; pp. 171–176. [Google Scholar]
- Feng, D.; Qi, Y.; Zhong, S.; Chen, Z.; Jiao, Y.; Chen, Q.; Jiang, T.; Chen, H. S3e: A large-scale multimodal dataset for collaborative slam. arXiv 2022, arXiv:2210.13723. [Google Scholar]
- Lajoie, P.-Y.; Beltrame, G. Swarm-slam: Sparse decentralized collaborative simultaneous localization and mapping framework for multi-robot systems. IEEE Robot. Autom. Lett. 2023, 9, 475–482. [Google Scholar] [CrossRef]
- Tian, Y.; Chang, Y.; Arias, F.H.; Nieto-Granda, C.; How, J.P.; Carlone, L. Kimera-multi: Robust, distributed, dense metric-semantic slam for multi-robot systems. IEEE Trans. Robot. 2022, 38, 2022–2038. [Google Scholar] [CrossRef]
- Xu, H.; Zhang, Y.; Zhou, B.; Wang, L.; Yao, X.; Meng, G.; Shen, S. Omni-swarm: A decentralized omnidirectional visual–inertial–uwb state estimation system for aerial swarms. IEEE Trans. Robot. 2022, 38, 3374–3394. [Google Scholar] [CrossRef]
- Xu, H.; Liu, P.; Chen, X.; Shen, S. D2SLAM: Decentralized and Distributed Collaborative Visual-inertial SLAM System for Aerial Swarm. arXiv 2022, arXiv:2211.01538. [Google Scholar]
- Peng, Z.; Xu, Y.; Yan, M.; Yin, W. Arock: An algorithmic framework for asynchronous parallel coordinate updates. SIAM J. Sci. Comput. 2016, 38, A2851–A2879. [Google Scholar] [CrossRef]
- Arafat, M.Y.; Alam, M.M.; Moh, S. Vision-based navigation techniques for unmanned aerial vehicles: Review and challenges. Drones 2023, 7, 89. [Google Scholar] [CrossRef]
- Mazhar, F.; Khan, M.G.; Sällberg, B. Precise indoor positioning using UWB: A review of methods, algorithms and implementations. Wirel. Pers. Commun. 2017, 97, 4467–4491. [Google Scholar] [CrossRef]
- Hapsari, G.I.; Munadi, R.; Erfianto, B.; Irawati, I.D. Future Research and Trends in Ultra-Wideband Indoor Tag Localization. IEEE Access 2024, 1. [Google Scholar] [CrossRef]
- Elsanhoury, M.; Mäkelä, P.; Koljonen, J.; Välisuo, P.; Shamsuzzoha, A.; Mantere, T.; Elmusrati, M.; Kuusniemi, H. Precision positioning for smart logistics using ultra-wideband technology-based indoor navigation: A review. IEEE Access 2022, 10, 44413–44445. [Google Scholar] [CrossRef]
- Xu, H.; Wang, L.; Zhang, Y.; Qiu, K.; Shen, S. Decentralized visual-inertial-uwb fusion for relative state estimation of aerial swarm. In Proceedings of the 2020 IEEE international conference on robotics and automation (ICRA), Paris, France, 31 May–31 August 2020; pp. 8776–8782. [Google Scholar]
- Cao, Y.; Beltrame, G. VIR-SLAM: Visual, inertial, and ranging SLAM for single and multi-robot systems. Auton. Robot. 2021, 45, 905–917. [Google Scholar] [CrossRef]
- Xie, J.; He, X.; Mao, J.; Zhang, L.; Hu, X. C2VIR-SLAM: Centralized collaborative visual-inertial-range simultaneous localization and mapping. Drones 2022, 6, 312. [Google Scholar] [CrossRef]
- Nguyen, T.-M.; Yuan, S.; Cao, M.; Nguyen, T.H.; Xie, L. Viral slam: Tightly coupled camera-imu-uwb-lidar slam. arXiv 2021, arXiv:2105.03296. [Google Scholar]
- Nguyen, T.-M.; Nguyen, T.H.; Cao, M.; Qiu, Z.; Xie, L. Integrated uwb-vision approach for autonomous docking of uavs in gps-denied environments. In Proceedings of the 2019 International Conference on Robotics and Automation (ICRA), Montreal, QC, Canada, 20–24 May 2019; pp. 9603–9609. [Google Scholar]
- Queralta, J.P.; Li, Q.; Schiano, F.; Westerlund, T. VIO-UWB-based collaborative localization and dense scene reconstruction within heterogeneous multi-robot systems. In Proceedings of the 2022 International Conference on Advanced Robotics and Mechatronics (ICARM), Guilin, China, 9–11 July 2022; pp. 87–94. [Google Scholar]
- Zou, Y.; Hu, E.; Deng, Z.; Jin, C. Multidimensional Scaling Algorithm for Mobile Swarming UAVs Localization. IEEE Trans. Intell. Veh. 2023, 1–11. [Google Scholar] [CrossRef]
- Nguyen, T.H.; Xie, L. Relative transformation estimation based on fusion of odometry and UWB ranging data. IEEE Trans. Robot. 2023, 39, 2861–2877. [Google Scholar] [CrossRef]
- Qin, T.; Li, P.; Shen, S. Vins-mono: A robust and versatile monocular visual-inertial state estimator. IEEE Trans. Robot. 2018, 34, 1004–1020. [Google Scholar] [CrossRef]
- Qin, T.; Cao, S.; Pan, J.; Shen, S. A general optimization-based framework for global pose estimation with multiple sensors. arXiv 2019, arXiv:1901.03642. [Google Scholar]
- Zaitseva, E.; Levashenko, V.; Mukhamediev, R.; Brinzei, N.; Kovalenko, A.; Symagulov, A. Review of Reliability Assessment Methods of Drone Swarm (Fleet) and a New Importance Evaluation Based Method of Drone Swarm Structure Analysis. Mathematics 2023, 11, 2551. [Google Scholar] [CrossRef]
- Trawny, N.; Roumeliotis, S.I. On the global optimum of planar, range-based robot-to-robot relative pose estimation. In Proceedings of the 2010 IEEE International Conference on Robotics and Automation, Anchorage, AK, USA, 3–7 May 2010; pp. 3200–3206. [Google Scholar]
- Wymeersch, H.; Lien, J.; Win, M.Z. Cooperative localization in wireless networks. Proc. IEEE 2009, 97, 427–450. [Google Scholar] [CrossRef]
- Ziegler, T.; Karrer, M.; Schmuck, P.; Chli, M. Distributed formation estimation via pairwise distance measurements. IEEE Robot. Autom. Lett. 2021, 6, 3017–3024. [Google Scholar] [CrossRef]
- De Leeuw, J.; Mair, P. Multidimensional Scaling Using Majorization: SMACOF in R; University of California, Los Angeles(UCLA): Los Angeles, CA, USA, 2011. [Google Scholar]
- Yang, B.; Chen, R.; Li, B.; Li, C. Multi-vehicle cooperative positioning based on edge-computed multidimensional scaling. China Commun. 2021, 18, 53–63. [Google Scholar] [CrossRef]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Swarm Number | Method | RMSE (m) | Average Time Cost (s) |
|---|---|---|---|
| 5 | NLS | 1.72 | 7.23 |
| 5 | SDP | 0.55 | 3.52 |
| 5 | QCQP | 0.48 | 5.02 |
| 5 | Ours | 0.52 | 3.48 |
| 10 | NLS | 1.93 | 9.30 |
| 10 | SDP | 0.58 | 6.89 |
| 10 | QCQP | 0.49 | 10.95 |
| 10 | Ours | 0.52 | 3.55 |
| Anchor Method | RMSE (m) | Average Time Cost (s) | Success Rate |
|---|---|---|---|
| QCQP | 0.11 | 3.99 | 86.3 |
| Ours | 0.12 | 2.89 | 98.5 |
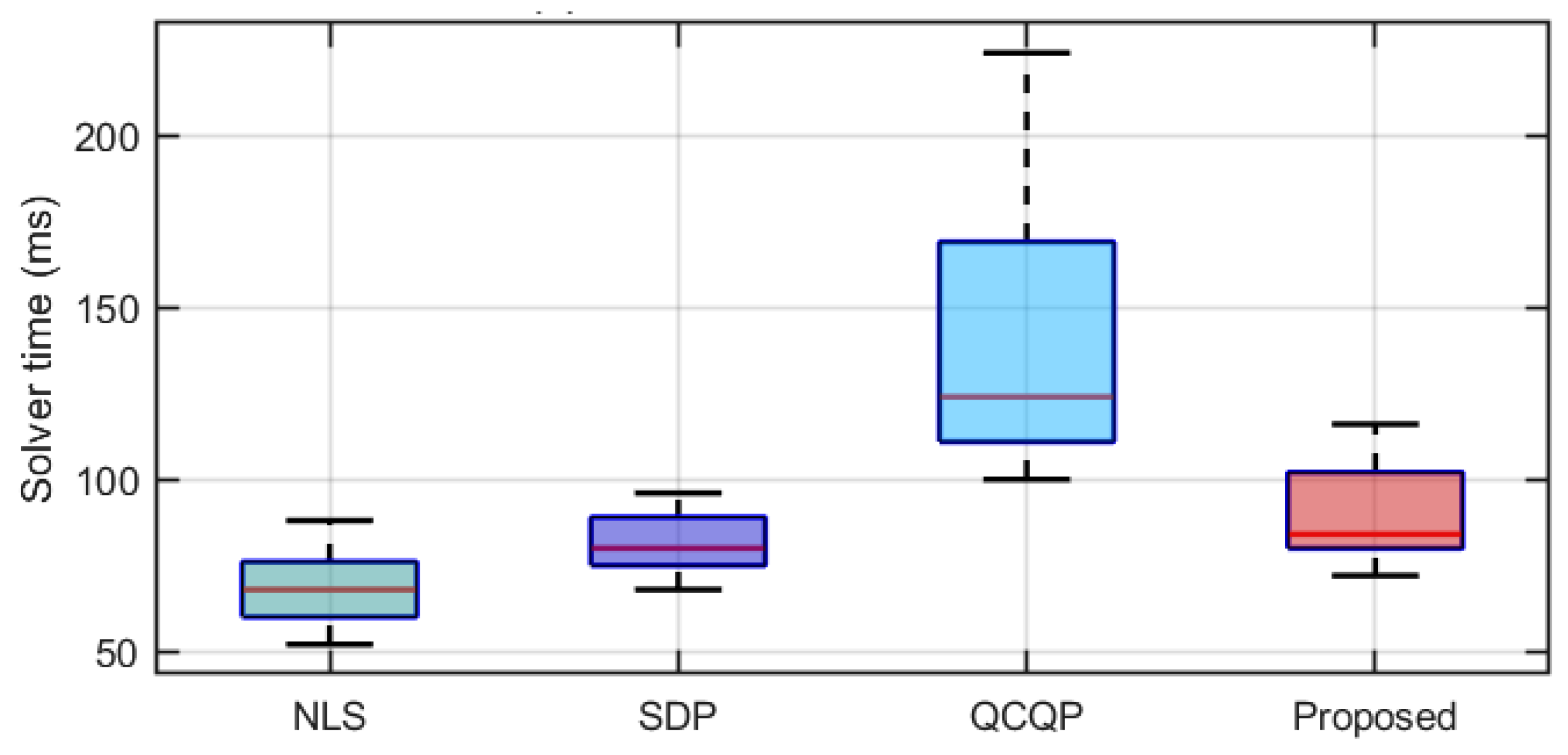
| Method | RMSE (m) | Average Time Cost (s) |
|---|---|---|
| NLS | 0.359 | 8.23 |
| SDP | 0.183 | 4.12 |
| QCQP | 0.115 | 5.57 |
| Ours | 0.141 | 3.98 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, R.; Deng, Z. Rapid Initialization Method of Unmanned Aerial Vehicle Swarm Based on VIO-UWB in Satellite Denial Environment. Drones 2024, 8, 339. https://doi.org/10.3390/drones8070339
Wang R, Deng Z. Rapid Initialization Method of Unmanned Aerial Vehicle Swarm Based on VIO-UWB in Satellite Denial Environment. Drones. 2024; 8(7):339. https://doi.org/10.3390/drones8070339
Chicago/Turabian StyleWang, Runmin, and Zhongliang Deng. 2024. "Rapid Initialization Method of Unmanned Aerial Vehicle Swarm Based on VIO-UWB in Satellite Denial Environment" Drones 8, no. 7: 339. https://doi.org/10.3390/drones8070339
APA StyleWang, R., & Deng, Z. (2024). Rapid Initialization Method of Unmanned Aerial Vehicle Swarm Based on VIO-UWB in Satellite Denial Environment. Drones, 8(7), 339. https://doi.org/10.3390/drones8070339