

The Challenges of Blood Sample Delivery via Drones in Urban Environment: A Feasibility Study through Specific Operation Risk Assessment Methodology



Abstract
1. Introduction
- Open category: it includes UAS operations with a maximum take-off mass lower than 25 kg. The drone must be kept in VLOS (Visual Line Of Sight) at all times by the remote pilot, who must also maintain the unmanned aircraft at a safe distance from people and must not fly over crowds. It is also prohibited to carry dangerous goods or drop any material. The remote pilot must keep the drone at a maximum height of 120 m from the closest point of the surface of the earth. If there is an obstacle taller than 105 m, the drone can be flown at a height up to 15 m above it, after having received the authorization by the entity responsible of the obstacle. Since the Open category includes low-risk operations, it does not require any prior operational authorization nor an operational declaration by the UAS operator.
- Specific category: authorization is required to operate in the Specific category. There are four different processes to obtain the operational authorization: the first one consists of the conduction of a risk assessment using the SORA methodology, which is then submitted to competent authority to obtain the authorization. On the other hand, if an operator intends to operate according to standard scenarios, it must send a declaration of compliance to the competent authority. In the third case, the operator could demonstrate compliance with the Pre-Defined Risk Assessments (PDRAs) in order to obtain the authorization from the competent authority. In the fourth case, the operator is exempt from obtaining an operational authorization, if it holds a LUC (Light UAS Operator Certificate) with the appropriate privileges.
- Certified category: since it includes highest risk operations, the UAS shall be certified, the remote pilot shall be licensed, and the operator shall be approved by the competent authority. An operation falls into the Certified category if it is conducted over assemblies of people with a UAS with a dimension of more than 3 m, or if it involves the transport of people or the carriage of dangerous goods.
2. Materials and Methods
2.1. Data Collection and Problem Definition
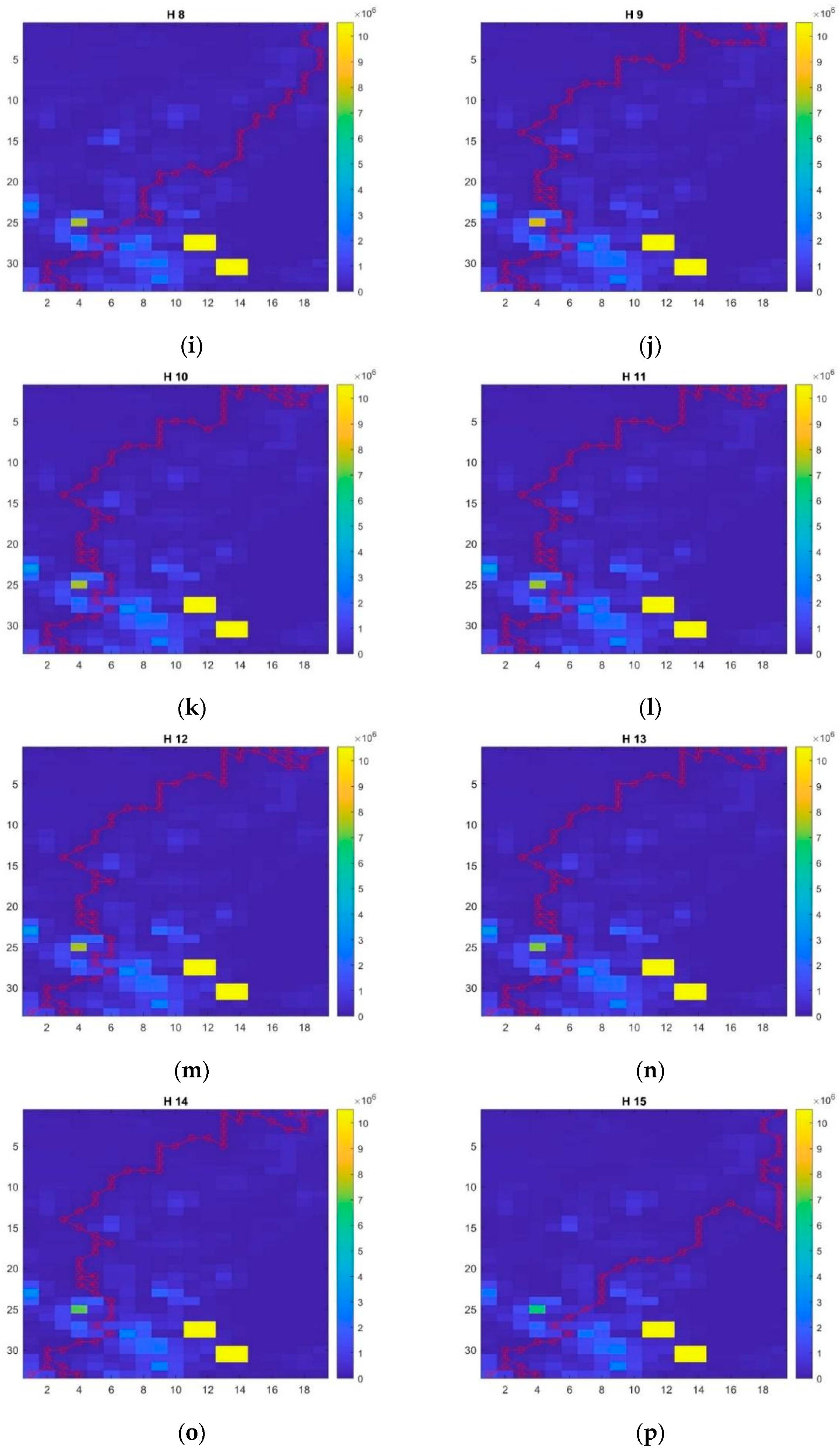
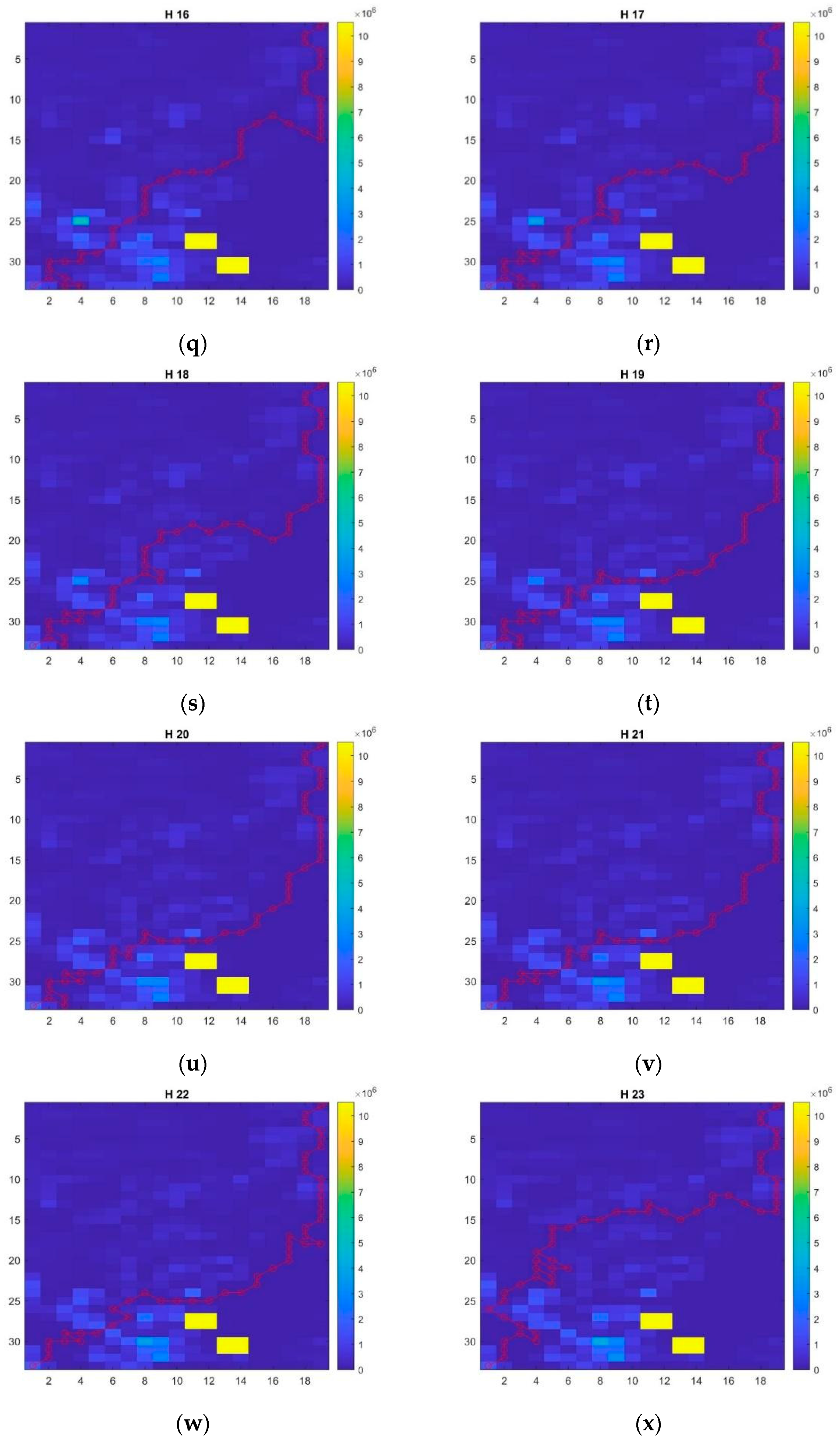
2.1.1. Population Density Data Collection
2.1.2. Choice of the Operation Sites
2.1.3. Definition of Operational Time
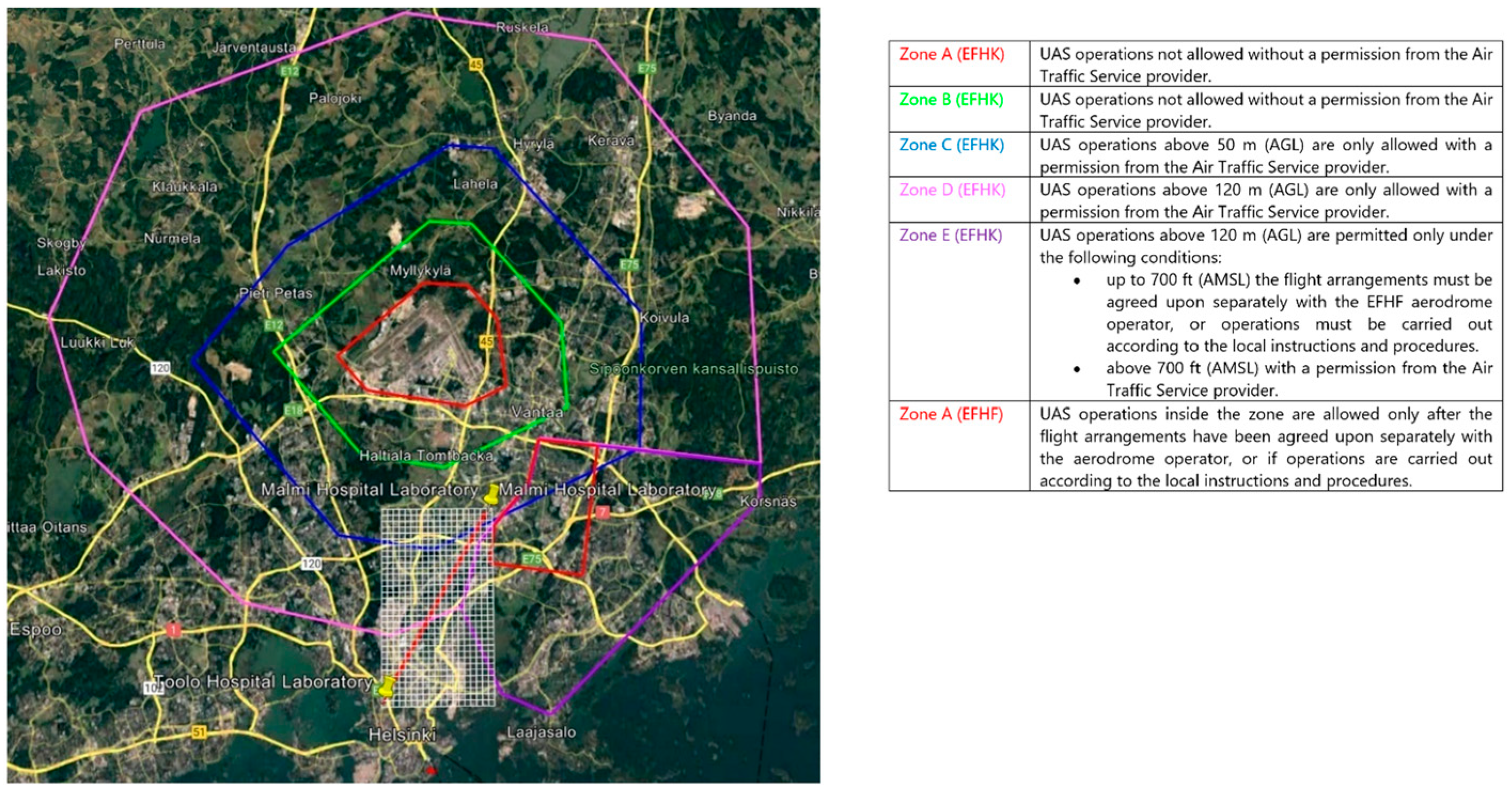
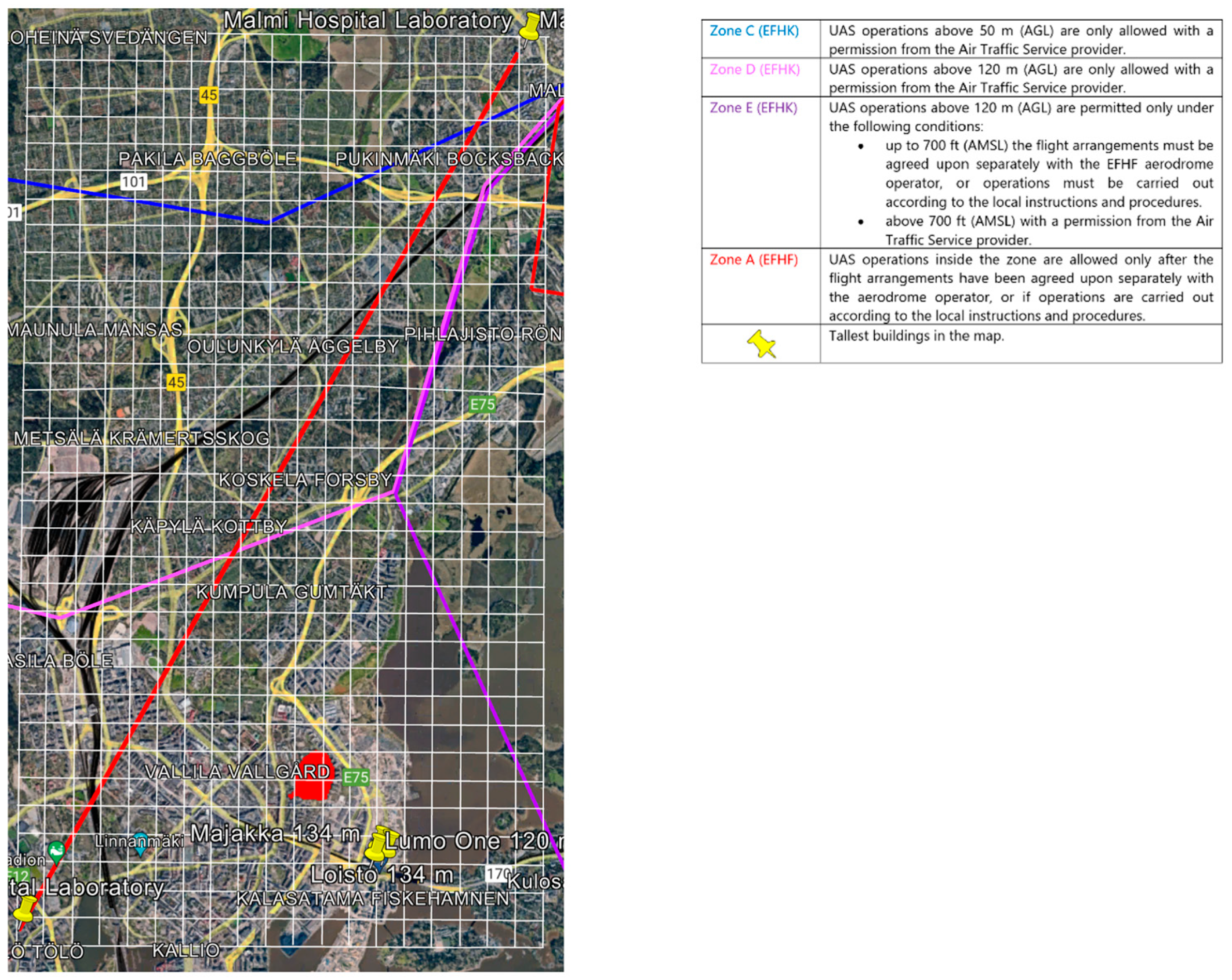
2.1.4. UAS Geographical Zones
2.1.5. Flight Height
2.1.6. Selection of the Drone
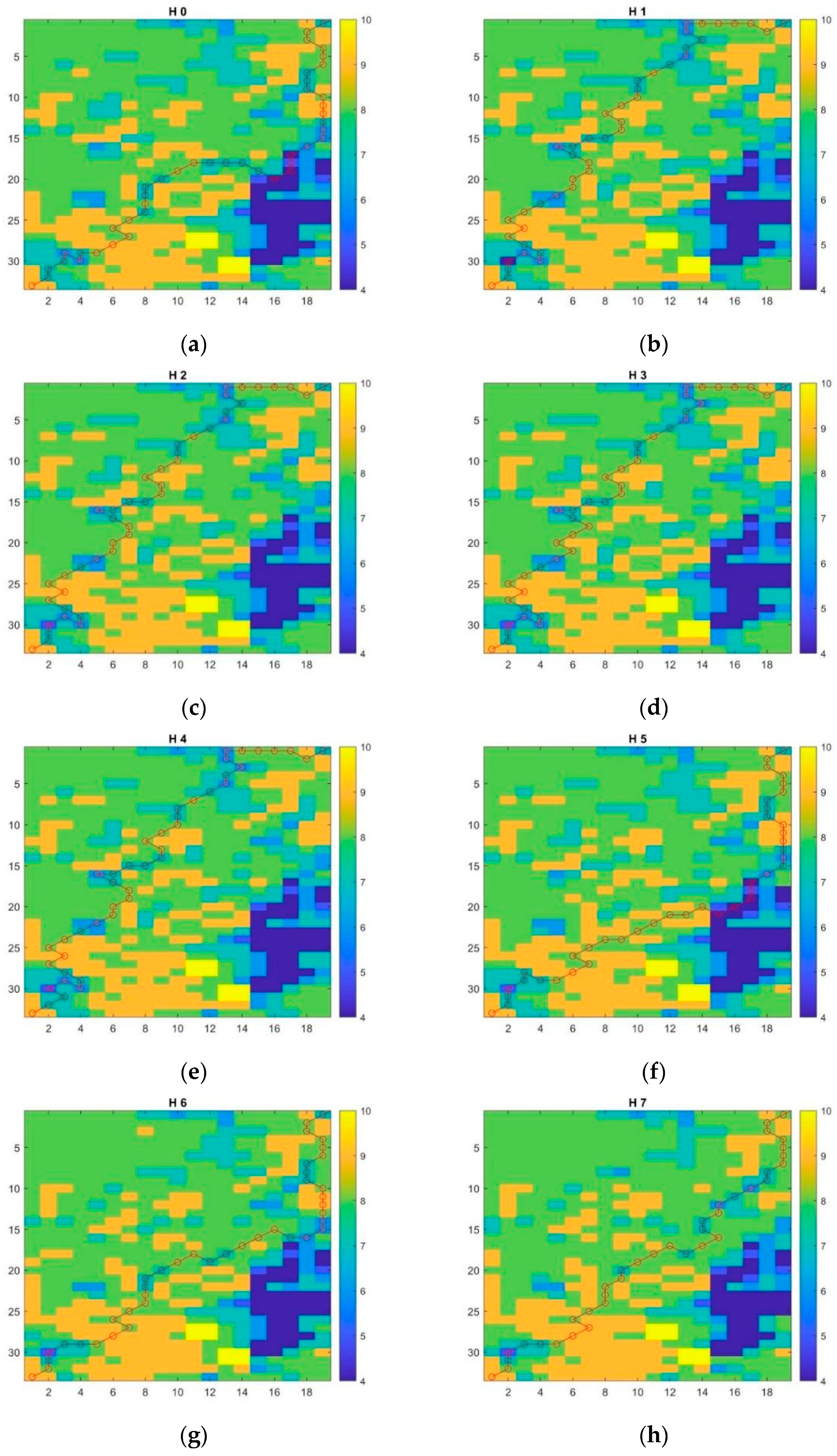
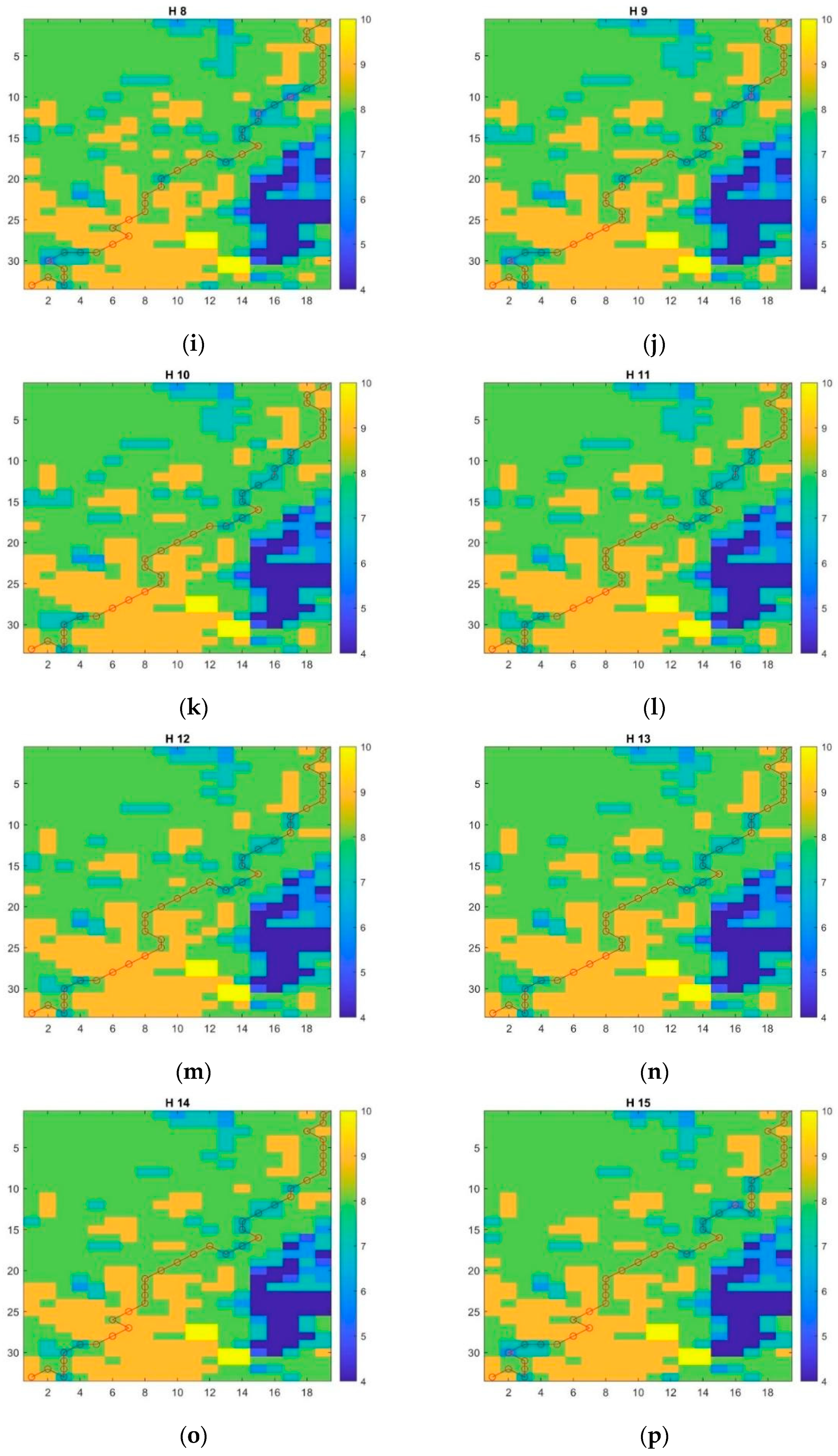
2.2. SORA Methodology Application and Simplified Risk-Based Trajectory Identification
3. Results
3.1. Straight-Line Trajectory
3.2. Risk-Driven Trajectory Optimization
4. Discussion
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A


References
- European Parliament; Official Journal of the European Union. Regulation EU 2018/1139 of the European Parliament and of the Council. 2018. Available online: https://eur-lex.europa.eu/legal-content/EN/TXT/?uri=CELEX%3A32018R1139 (accessed on 1 April 2024).
- Commission Implementing Regulation EU 2019/947. European Parliament, Council of the EU. Official Journal of the European Union. 2019. Available online: https://eur-lex.europa.eu/eli/reg_impl/2019/947/oj (accessed on 1 April 2024).
- Dhote, J.; Limbourg, S. Designing Unmanned Aerial Vehicle Networks for Biological Material Transportation—The Case of Brussels. Comput. Ind. Eng. 2020, 148, 106652. [Google Scholar] [CrossRef]
- Nyaaba, A.A.; Ayamga, M. Intricacies of Medical Drones in Healthcare Delivery: Implications for Africa. Technol. Soc. 2021, 66, 101624. [Google Scholar] [CrossRef]
- Ozkan, O. Multi-Objective Optimization of Transporting Blood Products by Routing UAVs: The Case of Istanbul. Int. Trans. Oper. Res. 2023, 30, 302–327. [Google Scholar] [CrossRef]
- Thiels, C.A.; Aho, J.M.; Zietlow, S.P.; Jenkins, D.H. Use of Unmanned Aerial Vehicles for Medical Product Transport. Air Med. J. 2015, 34, 104–108. [Google Scholar] [CrossRef] [PubMed]
- De Silvestri, S.; Capasso, P.J.; Gargiulo, A.; Molinari, S.; Sanna, A. Challenges for the Routine Application of Drones in Healthcare: A Scoping Review. Drones 2023, 7, 685. [Google Scholar] [CrossRef]
- Ling, G.; Draghic, N. Aerial Drones for Blood Delivery. Transfusion 2019, 59, 1608–1611. [Google Scholar] [CrossRef] [PubMed]
- O’Keeffe, D.T.; Johnson, K.; Maraka, S. Provision of Bidirectional Remote Patient Care with an Unmanned Aerial Vehicle. Mayo Clin. Proc. 2020, 95, 830. [Google Scholar] [CrossRef] [PubMed]
- Carrillo-Larco, R.M.; Moscoso-Porras, M.; Taype-Rondan, A.; Ruiz-Alejos, A.; Bernabe-Ortiz, A. The Use of Unmanned Aerial Vehicles for Health Purposes: A Systematic Review of Experimental Studies. Glob. Health Epidemiol. Genom. 2018, 3, e13. [Google Scholar] [CrossRef] [PubMed]
- Patel, K.; El-Khoury, J.M.; Simundic, A.-M.; Farnsworth, C.W.; Broell, F.; Genzen, J.R.; Amukele, T.K. Evolution of Blood Sample Transportation and Monitoring Technologies. Clin. Chem. 2021, 67, 812–819. [Google Scholar] [CrossRef] [PubMed]
- Balasingam, M. Drones in Medicine—The Rise of the Machines. Int. J. Clin. Pract. 2017, 71, e12989. [Google Scholar] [CrossRef] [PubMed]
- Haematology, T.L. Look! Up in the Sky! It’s a Bird. It’s a Plane. It’s a Medical Drone! Lancet Haematol. 2017, 4, e56. [Google Scholar] [CrossRef]
- Mangtani, L.M.; Khanorkar, A.K.; Titarmare, S.N.; Badhane, R.S.; Baghele, S.D.; Pandele, R.M.; Baig, M.M. Implement Emergency Medical Facility through Unmanned Aerial Vehical. In Proceedings of the 3rd International Conference on I-SMAC IoT in Social, Mobile, Analytics and Cloud, I-SMAC 2019, Palladam, India, 12–14 December 2019. [Google Scholar]
- Ayyappaa, N.; Raj, A.Y.; Adithya, A.; Murali, R.; Vinodh, A. Autonomous Drone for Efficacious Blood Conveyance. In Proceedings of the 2019 4th International Conference on Robotics and Automation Engineering, ICRAE 2019, Singapore, 22–24 November 2019. [Google Scholar]
- Nisingizwe, M.P.; Ndishimye, P.; Swaibu, K.; Nshimiyimana, L.; Karame, P.; Dushimiyimana, V.; Musabyimana, J.P.; Musanabaganwa, C.; Nsanzimana, S.; Law, M.R. Effect of Unmanned Aerial Vehicle (Drone) Delivery on Blood Product Delivery Time and Wastage in Rwanda: A Retrospective, Cross-Sectional Study and Time Series Analysis. Lancet Glob. Health 2022, 10, e564–e569. [Google Scholar] [CrossRef] [PubMed]
- Mion, F.U. Flying Drones to Exchange Lab Samples: Service Innovation by the Swiss Multisite Hospital EOC. In Service Design and Service Thinking in Healthcare and Hospital Management; Springer: Cham, Switzerland, 2018. [Google Scholar]
- Scott, J.E.; Scott, C.H. Models for Drone Delivery of Medications and Other Healthcare Items. Int. J. Healthc. Inf. Syst. Inform. 2018, 13, 20–34. [Google Scholar] [CrossRef]
- Niglio, F.; Comite, P.; Cannas, A.; Pirri, A.; Tortora, G. Preliminary Clinical Validation of a Drone-Based Delivery System in Urban Scenarios Using a Smart Capsule for Blood. Drones 2022, 6, 195. [Google Scholar] [CrossRef]
- Homier, V.; Brouard, D.; Nolan, M.; Roy, M.-A.; Pelletier, P.; McDonald, M.; de Champlain, F.; Khalil, E.; Grou-Boileau, F.; Fleet, R. Drone versus Ground Delivery of Simulated Blood Products to an Urban Trauma Center: The Montreal Medi-Drone Pilot Study. J. Trauma Acute Care Surg. 2021, 90, 515–521. [Google Scholar] [CrossRef] [PubMed]
- Jain, V.; Luthra, N. Medical Assistance Using Drones for Remote Areas. In Proceedings of the International Conference on Artificial Intelligence and Applications. Advances in Intelligent Systems and Computing; Bansal, V.P., THushir, M., Balas, V., Srivastava, R., Eds.; Springer: Singapore, 2021; Volume 1164. [Google Scholar] [CrossRef]
- Ackerman, E.; Koziol, M. The Blood Is Here: Zipline’s Medical Delivery Drones Are Changing the Game in Rwanda. IEEE Spectrum 2019, 56, 24–31. [Google Scholar] [CrossRef]
- Glauser, W. Blood-Delivering Drones Saving Lives in Africa and Maybe Soon in Canada. CMAJ Can. Med. Assoc. J. 2018, 190, E88–E89. [Google Scholar] [CrossRef] [PubMed]
- Ackerman, E.; Strickland, E. Medical Delivery Drones Take Flight in East Africa. IEEE Spectr. 2018, 55, 34–35. [Google Scholar] [CrossRef]
- Zailani, M.A.H.; Raja Sabudin, R.Z.A.; Abdul Rahman, R.; Mohd Saiboon, I.; Ismail, A.; Mahdy, Z.A. Drone Technology in Maternal Healthcare in Malaysia: A Narrative Review. Malays. J. Pathol. 2021, 43, 251–259. [Google Scholar] [PubMed]
- International Civil Aviation Organization (ICAO). Technical Instructions for the Safe Transport of Dangerous Goods by Air (Doc 9284); 2019–2020 Edition; International Civil Aviation Organization: Montreal, QC, Canada, 2018. [Google Scholar]
- Shelley, A.V. Ground Risk Model for UAVs. Int. J. Aviat. Aeronaut. Aerosp. 2023, 10. [Google Scholar] [CrossRef]
- Denney, E.; Pai, G.; Johnson, M. Towards a Rigorous Basis for Specific Operations Risk Assessment of UAS. In Proceedings of the 2018 IEEE/AIAA 37th Digital Avionics Systems Conference (DASC), London, UK, 23–27 September 2018; pp. 1–10. [Google Scholar]
- Habibi, H.; Venkateswara Rao, D.M.K.K.; Luis Sanchez-Lopez, J.; Voos, H. On SORA for High-Risk UAV Operations under New EU Regulations: Perspectives for Automated Approach. In Proceedings of the 2023 International Conference on Unmanned Aircraft Systems (ICUAS), Warsaw, Poland, 6–9 June 2023; pp. 213–220. [Google Scholar]
- Capitán, C.; Capitán, J.; Castaño, Á.R.; Ollero, A. Risk Assessment Based on SORA Methodology for a UAS Media Production Application. In Proceedings of the 2019 International Conference on Unmanned Aircraft Systems (ICUAS), Atlanta, GA, USA, 11–14 June 2019; pp. 451–459. [Google Scholar]
- Janik, P.; Zawistowski, M.; Fellner, R.; Zawistowski, G. Unmanned Aircraft Systems Risk Assessment Based on SORA for First Responders and Disaster Management. Appl. Sci. 2021, 11, 5364. [Google Scholar] [CrossRef]
- Martinez, C.; Sanchez-Cuevas, P.J.; Gerasimou, S.; Bera, A.; Olivares-Mendez, M.A. SORA Methodology for Multi-UAS Airframe Inspections in an Airport. Drones 2021, 5, 141. [Google Scholar] [CrossRef]
- Liu, Y. Routing Battery-Constrained Delivery Drones in a Depot Network: A Business Model and Its Optimization–Simulation Assessment. Transp. Res. Part C Emerg. Technol. 2023, 152, 104147. [Google Scholar] [CrossRef]
- Pinto, R.; Lagorio, A. Point-to-Point Drone-Based Delivery Network Design with Intermediate Charging Stations. Transp. Res. Part C Emerg. Technol. 2022, 135, 103506. [Google Scholar] [CrossRef]
- Dukkanci, O.; Kara, B.Y.; Bektaş, T. Minimizing Energy and Cost in Range-Limited Drone Deliveries with Speed Optimization. Transp. Res. Part C Emerg. Technol. 2021, 125, 102985. [Google Scholar] [CrossRef]
- Dataset Search. Available online: https://datasetsearch.research.google.com/ (accessed on 30 March 2024).
- Bergroth, C.; Järv, O.; Tenkanen, H.; Manninen, M.; Toivonen, T. A 24-Hour Population Distribution Dataset Based on Mobile Phone Data from Helsinki Metropolitan Area, Finland. Sci. Data 2022, 9, 39. [Google Scholar] [CrossRef] [PubMed]
- HUS. Available online: https://www.hus.fi/en (accessed on 30 March 2024).
- Google Earth Pro, (2024) 60°15′15.39″ N–60°10′51.59″ N; 24°59′58.76″ E–24°55′20.92″ E). Available online: http://www.google.com/earth/index.html (accessed on 30 March 2024).
- Helsinki-Vantaa (EFHK) Restrictive UAS Geographical Zones. Available online: https://www.droneinfo.fi/en/news/helsinki-vantaa-efhk-restrictive-uas-geographical-zone (accessed on 30 March 2024).
- UAS Geographical Zones in Machine-Readable Format. Available online: https://droneinfo.fi/en/news/uas-geographical-zones-machine-readable-format (accessed on 30 March 2024).
- List of Tallest Buildings in Finland. Available online: https://en.wikipedia.org/wiki/List_of_tallest_buildings_in_Finland (accessed on 30 March 2024).
- Hercules 10. Available online: https://www.dronevolt.com/en/expert-solutions/hercules-10/ (accessed on 30 March 2024).
- Hercules 20. Available online: https://www.dronevolt.com/en/expert-solutions/hercules-20/ (accessed on 30 March 2024).
- Wingcopter 178. Available online: https://wingcopter.com/wp-content/uploads/2021/02/Technical-Details-Wingcopter-178-Heavy-Lift-A-Delivery-Variant-1-1.pdf (accessed on 30 March 2024).
- Wingcopter 198. Available online: https://wingcopter.com/wingcopter-198 (accessed on 30 March 2024).
- T-Motor. Available online: https://store.tmotor.com/category.php?id=75 (accessed on 30 March 2024).
- Wing. Available online: https://wing.com/ (accessed on 30 March 2024).
- The MathWorks Inc. MatLab, 2020, Natick, Massachussetts, USA. 2022. Available online: https://www.mathworks.com (accessed on 30 March 2024).
- JARUS, External Consultation—“SORA Version 2.5 Package. Available online: http://jarus-rpas.org/document/sora-2-5-annex-h-uas-safety-services-considerations/ (accessed on 30 March 2024).
- Geister, R.; Limmer, L.; Rippl, M.; Dautermann, T. Total System Error Performance of Drones for an Unmanned PBN Concept. In Proceedings of the 2018 Integrated Communications, Navigation, Surveillance Conference (ICNS), Herndon, VA, USA, 10–12 April 2018; pp. 1–12. [Google Scholar]
- Means of Compliance with Light-UAS.2511 Containment. Available online: https://www.easa.europa.eu/en/document-library/product-certification-consultations/final-means-compliance-light-uas2511-moc-light (accessed on 30 March 2024).
- StatFin, Statistics Finland, Finland’s Preliminary Population Structure by Area. 2022. Available online: https://stat.fi/en/publication/cktlhpm743g870c55g0o669k0 (accessed on 30 March 2024).
- Mobilidade e Funcionalidade Do Território Nas Áreas Metropolitanas Do Porto e de Lisboa. 2017. Available online: https://www.ine.pt/xportal/xmain?xpid=INE&xpgid=ine_publicacoes&PUBLICACOESpub_boui=349495406&PUBLICACOESmodo=2&xlang=pt (accessed on 30 March 2024).
- FAA UAS Center of Excellence Task A4: UAS Ground Collision Severity Evaluation. Available online: https://rosap.ntl.bts.gov/view/dot/32209 (accessed on 30 March 2024).
- EASA. Notice of Proposed Amendment 2017-05 (B). Introduction of a Regulatory Framework for the Operation of Drones, Unmanned Aircraft System Operations in the Open and Specific Category. 2017. Available online: https://www.easa.europa.eu/en/downloads/22496/en (accessed on 30 March 2024).
- Parachute Descent Rate Calculator. Available online: https://fruitychutes.com/help_for_parachutes/parachute-descent-rate-calculator.htm (accessed on 30 March 2024).
- EASA Design Verification Report. Available online: https://www.easa.europa.eu/en/domains/civil-drones-rpas/specific-category-civil-drones/designverification-report (accessed on 30 March 2024).
- EASA Guidelines on Design Verification of UAS Operated in the “Specific” Category and Classified in SAIL III and IV 2021. Available online: https://www.easa.europa.eu/en/guidelines-design-verification-uas-operated-specific-category (accessed on 30 March 2024).
- Najy, W.; Archetti, C.; Diabat, A. Collaborative Truck-and-Drone Delivery for Inventory-Routing Problems. Transp. Res. Part C Emerg. Technol. 2023, 146, 103791. [Google Scholar] [CrossRef]
- Zhang, N.; Liu, H.; Ng, B.F.; Low, K.H. Collision Probability between Intruding Drone and Commercial Aircraft in Airport Restricted Area Based on Collision-Course Trajectory Planning. Transp. Res. Part C Emerg. Technol. 2020, 120, 102736. [Google Scholar] [CrossRef]
- Kovacova, M.; Gravio, G.D.; Patriarca, R. Unmanned Aerial Systems: Status and Forthcoming Challenges for Safety Risk Management. Transp. Res. Procedia 2022, 65, 329–338. [Google Scholar] [CrossRef]
- Simone, F.; Akel, A.J.N.; Gravio, G.D.; Patriarca, R. Thinking in Systems, Sifting Through Simulations: A Way Ahead for Cyber Resilience Assessment. IEEE Access 2023, 11, 11430–11450. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Cells with Equal Risk Value | Cell Chosen |
|---|---|
| A, B | B |
| A, C | C |
| A, D | D |
| A, E | A |
| B, C | C |
| B, D | B |
| B, E | B |
| C, D | C |
| C, E | C |
| D, E | D |
| A, B, C | C |
| A, B, D | B |
| A, B, E | B |
| A, C, D | C |
| A, C, E | C |
| A, D, E | D |
| B, C, D | C |
| B, C, E | C |
| B, D, E | B |
| C, D, E | C |
| A, C, D, E | C |
| A, B, D, E | B |
| A, B, C, E | C |
| A, B, C, D | C |
| A, B, C, D, E | C |
| Requirements | Verified? | Note |
|---|---|---|
| If the operation falls under the “Open” category or if the competent authority has determined that the UAS is “harmless” (the worst credible case is negligible or minor in consequence) in terms of the risk presented by the operation. | NO | The operation does not fall in the “Open” category because it is a BVLOS operation and material is expected to be released. |
| If the operation is covered by a “standard scenario” recognized by the competent authority. | NO | The operation is not covered by any “standard scenario”. |
| If the operation falls under the “certified” category. | NO | The operation does not fall into the “certified” category since the drone maximum dimension does not exceed 3 m, it does not fly over assemblies, it does not transport passengers, and it does not transport dangerous goods. |
| If the operation is subject to specific “no-go” criteria from the competent authority. | NO | The operation is not subject to specific “no-go” criteria from the competent authority. No-go criteria are operations prohibited by the authority, for example, the dropping of prohibited material. |
| Max UA Characteristics Dimension | 1 m | 3 m | 8 m | 20 m | 40 m | |
|---|---|---|---|---|---|---|
| Max Cruise Speed | 25 m/s | 35 m/s | 75 m/s | 150 m/s | 200 m/s | |
| Maximum iGRC population density (ppl/km2) | Controlled ground area | 1 | 2 | 3 | 4 | 5 |
| <25 | 3 | 4 | 5 | 6 | 7 | |
| <250 | 4 | 5 | 6 | 7 | 8 | |
| <2500 | 5 | 6 | 7 | 8 | 9 | |
| <25,000 | 6 | 7 | 8 | 9 | 10 | |
| <250,000 | 7 | 8 | 9 | 10 | 11 | |
| >250,000 | 7 | 9 | Category C Operations (SORA N/A) | |||
| Hour | Max Population Density/km2 | iGRC |
|---|---|---|
| H 0 | 19,868 | 7 |
| H 1 | 23,681 | 7 |
| H 2 | 27,052 | 8 |
| H 3 | 29,042 | 8 |
| H 4 | 29,055 | 8 |
| H 5 | 27,699 | 8 |
| H 6 | 34,730 | 8 |
| H 7 | 53,964 | 8 |
| H 8 | 76,027 | 8 |
| H 9 | 80,448 | 8 |
| H 10 | 76,115 | 8 |
| H 11 | 74,717 | 8 |
| H 12 | 75,888 | 8 |
| H 13 | 73,073 | 8 |
| H 14 | 70,222 | 8 |
| H 15 | 65,663 | 8 |
| H 16 | 51,183 | 8 |
| H 17 | 36,822 | 8 |
| H 18 | 29,124 | 8 |
| H 19 | 25,273 | 8 |
| H 20 | 19,983 | 7 |
| H 21 | 18,854 | 7 |
| H 22 | 19,367 | 7 |
| H 23 | 18,528 | 7 |
| Mitigation Type | Integrity/Assurance | Criterion | Description | Available Level of Integrity/Assurance |
|---|---|---|---|---|
| M1(A)—Strategic mitigations for ground risk | Integrity | Criterion #1 Evaluation of people at risk | The drone is not expected to penetrate a structure under which people are sheltered, and it is reasonable to consider that most of the non-active participants will be located under a structure. | L/M/H In Annex B [50], it is stated that drones weighing less than 25 kg are not able to penetrate structures (except in some rare cases). It can also be supposed that people usual spend most of the time indoors. |
| Criterion #2 Impact on at-risk population | The at-risk population is lowered by at least 1 iGRC population band (~90%) using one or more methods described in the Level of Integrity for Criterion #1 above. | L It is supposed that the greatest part of the population present in the area is sheltered under a structure. * | ||
| Assurance | Criterion #1 Evaluation of people at risk | All mapping products, data sources and processes used to claim lowering the density of the population at risk are accepted/approved by the competent authority. | L/M/H The lowering of the density of population for drones weighing less than 25 kg is stated in the Annex B [50] and so it is approved by the competent authority. | |
| Criterion #2 Impact on at-risk population | The applicant has supporting evidence that the required level of integrity is achieved. This is typically achieved by means of testing, analysis, simulation, inspection, design review and through operational experience. | L/M It is supposed that studies were conducted to demonstrate the tendency of people to spend the majority of time indoors. | ||
| Level of robustness M1 (A) | Low | |||
| M1(B)—Visual Line of Sight (VLOS)—avoid flying over people | Integrity | Criterion #1 |
| Not applicable, since the operation is not performed in VLOS. |
| Assurance | Criterion #1 | The operational procedures for the mitigation are documented, including the safe distance from non-active participants (when applicable). | Not applicable, since the integrity is not applicable. | |
| Level of robustness M1 (B) | N/A | |||
| M2—Effects of UA impact dynamics are reduced | Integrity | Criterion #1 Technical design |
| M ** It is assumed that equipping the drone with a parachute can reduce the risk to the population by 90%. The system is designed in such a way that in case the drone is in a freefall situation, there is an automatic system that opens the parachute. The inadvertent opening of the parachute will not affect the safety of the operation, but the drone will land safely. |
| Criterion #2 Procedures, if applicable | Any equipment used to reduce the effect of the UA impact dynamics are installed and maintained in accordance with manufacturer instructions. | L/M/H A parachute is installed and maintained according to the manufacturer instructions. | ||
| Criterion #3 Training, if applicable | When the use of the mitigation requires action from the remote crew, then training must be provided for the remote crew by the operator. If the personnel responsible for the installation and maintenance of the mitigation measures are internal to the operator, then these personnel must be identified and provided training by the operator. | Not applicable; the parachute is activated automatically. | ||
| Assurance | Criterion #1 Technical design | The applicant has supporting evidence to claim the required level of integrity and reliability has been achieved. This is typically carried out by means of testing, analysis, simulation, inspection, design review and through operational experience. | M Tests and simulations on the automatic parachute system are performed during the design and the post-design phase. Also, industry standards are utilized during the design of the parachute. | |
| Criterion #2 Procedures, if applicable |
| M The parachute is installed and maintained according to the manufacturer instructions. These instructions are validated by the competent authority and the procedures are tested with dedicated flight tests. | ||
| Criterion #3 Training, if applicable | / | Not applicable, since the integrity is not applicable. | ||
| Level of robustness M2 | Medium | |||
| Level of Robustness | |||
|---|---|---|---|
| Mitigations for Ground Risk | Low | Medium | High |
| M1(A)—Strategic mitigations for ground risk | −1 | −2 | −3 |
| M1(B)—Visual Line of Sight (VLOS)—Avoid flying over people | −1 | N/A | N/A |
| M2—Effects of UA impact dynamics are reduced | 0 | −1 | −2/−3 |
| Residual ARC | ||||
|---|---|---|---|---|
| Final GRC | a | b | c | d |
| ≤2 | I | II | IV | VI |
| 3 | II | II | IV | VI |
| 4 | III | III | IV | VI |
| 5 | IV | IV | IV | VI |
| 6 | V | V | V | VI |
| 7 | VI | VI | VI | VI |
| >7 | Category C Operation | |||
| Hour | Max Population Density/km2 | Intrinsic GRC | Final GRC | Residual ARC | SAIL |
|---|---|---|---|---|---|
| H 0 | 19,868 | 7 | 5 | a | IV |
| H 1 | 23,681 | 7 | 5 | a | IV |
| H 2 | 27,052 | 8 | 6 | a | V |
| H 3 | 29,042 | 8 | 6 | a | V |
| H 4 | 29,055 | 8 | 6 | a | V |
| H 5 | 27,699 | 8 | 6 | a | V |
| H 6 | 34,730 | 8 | 6 | a | V |
| H 7 | 53,964 | 8 | 6 | a | V |
| H 8 | 76,027 | 8 | 6 | a | V |
| H 9 | 80,448 | 8 | 6 | a | V |
| H 10 | 76,115 | 8 | 6 | a | V |
| H 11 | 74,717 | 8 | 6 | a | V |
| H 12 | 75,888 | 8 | 6 | a | V |
| H 13 | 73,073 | 8 | 6 | a | V |
| H 14 | 70,222 | 8 | 6 | a | V |
| H 15 | 65,663 | 8 | 6 | a | V |
| H 16 | 51,183 | 8 | 6 | a | V |
| H 17 | 36,822 | 8 | 6 | a | V |
| H 18 | 29,124 | 8 | 6 | a | V |
| H 19 | 25,273 | 8 | 6 | a | V |
| H 20 | 19,983 | 7 | 5 | a | IV |
| H 21 | 18,854 | 7 | 5 | a | IV |
| H 22 | 19,367 | 7 | 5 | a | IV |
| H 23 | 18,528 | 7 | 5 | a | IV |
| Hour | One-Way Length (Population Density) [m] | Total Length [m] | Feasibility (Population Density) | Percentage of Range still Flyable | One-Way Length (Ground Risk) [m] | Total Length [m] | Feasibility (Ground Risk) | Percentage of Range Still Flyable |
|---|---|---|---|---|---|---|---|---|
| H 0 | 16,046 | 32,799 |  | 56.27% | 12,571 | 25,849 |  | 65.53% |
| H 1 | 14,985 | 30,678 |  | 59.10% | 13,192 | 27,092 |  | 63.88% |
| H 2 | 14,985 | 30,678 |  | 59.10% | 13,192 | 27,092 |  | 63.88% |
| H 3 | 14,985 | 30,678 |  | 59.10% | 13,399 | 27,506 |  | 63.33% |
| H 4 | 14,839 | 30,385 |  | 59.49% | 13,399 | 27,506 |  | 63.33% |
| H 5 | 14,839 | 30,385 |  | 59.49% | 11,925 | 24,556 |  | 67.26% |
| H 6 | 12,218 | 25,142 |  | 66.48% | 11,925 | 24,556 |  | 67.26% |
| H 7 | 14,692 | 30,092 |  | 59.88% | 11,278 | 23,263 |  | 68.98% |
| H 8 | 13,425 | 27,756 |  | 63.26% | 11,985 | 24,678 |  | 67.10% |
| H 9 | 16,485 | 33,678 |  | 55.10% | 11,985 | 24,678 |  | 67.10% |
| H 10 | 17,399 | 35,506 |  | 52.66% | 11,278 | 23,263 |  | 68.98% |
| H 11 | 17,753 | 36,213 |  | 51.72% | 11,632 | 23,971 |  | 68.04% |
| H 12 | 17,399 | 35,506 |  | 52.66% | 11,632 | 23,971 |  | 68.04% |
| H 13 | 16,692 | 34,092 |  | 54.54% | 11,632 | 23,971 |  | 68.04% |
| H 14 | 16,692 | 34,092 |  | 54.54% | 11,632 | 23,971 |  | 68.04% |
| H 15 | 13,985 | 28,678 |  | 61.76% | 12,485 | 25,678 |  | 65.76% |
| H 16 | 13,571 | 27,849 |  | 62.87% | 12,485 | 25,678 |  | 65.76% |
| H 17 | 14,278 | 29,263 |  | 60.98% | 12,132 | 24,971 |  | 66.71% |
| H 18 | 14,278 | 29,263 |  | 60.98% | 11,278 | 23,263 |  | 68.98% |
| H 19 | 13,364 | 27,435 |  | 63.42% | 11,718 | 24,142 |  | 67.81% |
| H 20 | 13,364 | 27,435 |  | 63.42% | 11,071 | 22,849 |  | 69.53% |
| H 21 | 12,657 | 26,021 |  | 65.31% | 11,278 | 23,263 |  | 68.98% |
| H 22 | 13,218 | 27,142 |  | 63.81% | 12,071 | 24,849 |  | 66.87% |
| H 23 | 16,046 | 32,799 |  | 56.27% | 12,485 | 25,678 |  | 65.76% |
| Hour | One-Way Length (Population Density) [m] | N° Cells with GRC = 4 | N° Cells with GRC = 5 | N° Cells with GRC = 6 | N° Cells with GRC = 7 | N° Cells with GRC = 8 | N° Cells with GRC = 9 | Cell Occupancy with GR > 6 | Max GRC | Final GRC | SAIL |
|---|---|---|---|---|---|---|---|---|---|---|---|
| H 0 | 16,046 | 0 | 0 | 9 | 16 | 25 | 3 | 83% | 9 | 7 | VI |
| 0% | 0% | 17% | 30% | 47% | 6% | ||||||
| H 1 | 14,985 | 1 | 0 | 9 | 17 | 20 | 3 | 80% | 9 | 7 | VI |
| 2% | 0% | 18% | 34% | 40% | 6% | ||||||
| H 2 | 14,985 | 0 | 1 | 9 | 17 | 20 | 3 | 80% | 9 | 7 | VI |
| 0% | 2% | 18% | 34% | 40% | 6% | ||||||
| H 3 | 14,985 | 0 | 1 | 9 | 18 | 18 | 4 | 80% | 9 | 7 | VI |
| 0% | 2% | 18% | 36% | 36% | 8% | ||||||
| H 4 | 14,839 | 0 | 1 | 8 | 19 | 17 | 4 | 82% | 9 | 7 | VI |
| 0% | 2% | 16% | 39% | 35% | 8% | ||||||
| H 5 | 14,839 | 0 | 1 | 6 | 21 | 17 | 4 | 86% | 9 | 7 | VI |
| 0% | 2% | 12% | 43% | 35% | 8% | ||||||
| H 6 | 12,218 | 6 | 3 | 4 | 10 | 15 | 3 | 68% | 9 | 7 | VI |
| 15% | 7% | 10% | 24% | 37% | 7% | ||||||
| H 7 | 14,692 | 3 | 2 | 3 | 10 | 27 | 3 | 83% | 9 | 7 | VI |
| 6% | 4% | 6% | 21% | 56% | 6% | ||||||
| H 8 | 13,425 | 0 | 0 | 3 | 12 | 27 | 3 | 93% | 9 | 7 | VI |
| 0% | 0% | 7% | 27% | 60% | 7% | ||||||
| H 9 | 16,485 | 0 | 0 | 5 | 16 | 29 | 6 | 91% | 9 | 7 | VI |
| 0% | 0% | 9% | 29% | 52% | 11% | ||||||
| H 10 | 17,399 | 0 | 0 | 4 | 18 | 31 | 5 | 93% | 9 | 7 | VI |
| 0% | 0% | 7% | 31% | 53% | 9% | ||||||
| H 11 | 17,753 | 0 | 0 | 3 | 19 | 32 | 5 | 94% | 9 | 7 | VI |
| 0% | 0% | 5% | 32% | 54% | 8% | ||||||
| H 12 | 17,399 | 0 | 0 | 3 | 17 | 33 | 5 | 95% | 9 | 7 | VI |
| 0% | 0% | 5% | 29% | 57% | 9% | ||||||
| H 13 | 16,692 | 0 | 0 | 3 | 16 | 32 | 5 | 95% | 9 | 7 | VI |
| 0% | 0% | 5% | 29% | 57% | 9% | ||||||
| H 14 | 16,692 | 0 | 0 | 3 | 15 | 34 | 4 | 95% | 9 | 7 | VI |
| 0% | 0% | 5% | 27% | 61% | 7% | ||||||
| H 15 | 13,985 | 0 | 0 | 3 | 9 | 30 | 4 | 93% | 9 | 7 | VI |
| 0% | 0% | 7% | 20% | 65% | 9% | ||||||
| H 16 | 13,571 | 0 | 0 | 3 | 10 | 30 | 3 | 93% | 9 | 7 | VI |
| 0% | 0% | 7% | 22% | 65% | 7% | ||||||
| H 17 | 14,278 | 3 | 1 | 3 | 10 | 28 | 3 | 85% | 9 | 7 | VI |
| 6% | 2% | 6% | 21% | 58% | 6% | ||||||
| H 18 | 14,278 | 3 | 0 | 4 | 10 | 30 | 1 | 86% | 9 | 7 | VI |
| 6% | 0% | 8% | 21% | 63% | 2% | ||||||
| H 19 | 13,364 | 6 | 0 | 8 | 9 | 20 | 3 | 70% | 9 | 7 | VI |
| 13% | 0% | 17% | 20% | 43% | 7% | ||||||
| H 20 | 13,364 | 6 | 0 | 8 | 10 | 20 | 2 | 70% | 9 | 7 | VI |
| 13% | 0% | 17% | 22% | 43% | 4% | ||||||
| H 21 | 12,657 | 6 | 1 | 7 | 10 | 17 | 3 | 69% | 9 | 7 | VI |
| 14% | 2% | 16% | 23% | 39% | 7% | ||||||
| H 22 | 13,218 | 8 | 2 | 7 | 12 | 14 | 2 | 62% | 9 | 7 | VI |
| 18% | 4% | 16% | 27% | 31% | 4% | ||||||
| H 23 | 16,046 | 1 | 0 | 8 | 19 | 22 | 3 | 83% | 9 | 7 | VI |
| 2% | 0% | 15% | 36% | 42% | 6% |
| Hour | One-Way Length (Ground Risk) [m] | N° Cells with GRC = 4 | N° Cells with GRC = 5 | N° Cells with GRC = 6 | N° Cells with GRC = 7 | N° Cells with GRC = 8 | N° Cells with GRC = 9 | Cell Occupancy with GR > 6 | Max GRC | Final GRC | SAIL |
|---|---|---|---|---|---|---|---|---|---|---|---|
| H 0 | 12,571 | 3 | 1 | 5 | 17 | 13 | 3 | 78% | 9 | 7 | VI |
| 7% | 2% | 12% | 40% | 31% | 7% | ||||||
| H 1 | 13,192 | 1 | 0 | 7 | 15 | 18 | 1 | 81% | 9 | 7 | VI |
| 2% | 0% | 17% | 36% | 43% | 2% | ||||||
| H 2 | 13,192 | 0 | 1 | 7 | 15 | 18 | 1 | 81% | 9 | 7 | VI |
| 0% | 2% | 17% | 36% | 43% | 2% | ||||||
| H 3 | 13,399 | 0 | 1 | 8 | 14 | 18 | 1 | 79% | 9 | 7 | VI |
| 0% | 2% | 19% | 33% | 43% | 2% | ||||||
| H 4 | 13,399 | 0 | 1 | 8 | 15 | 17 | 1 | 79% | 9 | 7 | VI |
| 0% | 2% | 19% | 36% | 40% | 2% | ||||||
| H 5 | 11,925 | 4 | 2 | 2 | 11 | 16 | 4 | 79% | 9 | 7 | VI |
| 10% | 5% | 5% | 28% | 41% | 10% | ||||||
| H 6 | 11,925 | 0 | 1 | 3 | 13 | 19 | 3 | 90% | 9 | 7 | VI |
| 0% | 3% | 8% | 33% | 49% | 8% | ||||||
| H 7 | 11,278 | 0 | 1 | 2 | 10 | 21 | 2 | 92% | 9 | 7 | VI |
| 0% | 3% | 6% | 28% | 58% | 6% | ||||||
| H 8 | 11,985 | 0 | 0 | 3 | 10 | 22 | 3 | 92% | 9 | 7 | VI |
| 0% | 0% | 8% | 26% | 58% | 8% | ||||||
| H 9 | 11,985 | 0 | 0 | 3 | 11 | 21 | 3 | 92% | 9 | 7 | VI |
| 0% | 0% | 8% | 29% | 55% | 8% | ||||||
| H 10 | 11,278 | 0 | 0 | 0 | 12 | 21 | 3 | 100% | 9 | 7 | VI |
| 0% | 0% | 0% | 33% | 58% | 8% | ||||||
| H 11 | 11,632 | 0 | 0 | 0 | 12 | 22 | 3 | 100% | 9 | 7 | VI |
| 0% | 0% | 0% | 32% | 59% | 8% | ||||||
| H 12 | 11,632 | 0 | 0 | 0 | 11 | 23 | 3 | 100% | 9 | 7 | VI |
| 0% | 0% | 0% | 30% | 62% | 8% | ||||||
| H 13 | 11,632 | 0 | 0 | 0 | 11 | 23 | 3 | 100% | 9 | 7 | VI |
| 0% | 0% | 0% | 30% | 62% | 8% | ||||||
| H 14 | 11,632 | 0 | 0 | 0 | 10 | 24 | 3 | 100% | 9 | 7 | VI |
| 0% | 0% | 0% | 27% | 65% | 8% | ||||||
| H 15 | 12,485 | 0 | 0 | 2 | 10 | 25 | 3 | 95% | 9 | 7 | VI |
| 0% | 0% | 5% | 25% | 63% | 8% | ||||||
| H 16 | 12,485 | 0 | 0 | 2 | 9 | 27 | 2 | 95% | 9 | 7 | VI |
| 0% | 0% | 5% | 23% | 68% | 5% | ||||||
| H 17 | 12,132 | 0 | 0 | 1 | 11 | 25 | 2 | 97% | 9 | 7 | VI |
| 0% | 0% | 3% | 28% | 64% | 5% | ||||||
| H 18 | 11,278 | 0 | 0 | 1 | 10 | 25 | 0 | 97% | 8 | 6 | V |
| 0% | 0% | 3% | 28% | 69% | 0% | ||||||
| H 19 | 11,718 | 0 | 0 | 5 | 7 | 25 | 2 | 87% | 9 | 7 | VI |
| 0% | 0% | 13% | 18% | 64% | 5% | ||||||
| H 20 | 11,071 | 0 | 0 | 3 | 11 | 22 | 0 | 92% | 8 | 6 | V |
| 0% | 0% | 8% | 31% | 61% | 0% | ||||||
| H 21 | 11,278 | 0 | 0 | 3 | 14 | 19 | 0 | 92% | 8 | 6 | V |
| 0% | 0% | 8% | 39% | 53% | 0% | ||||||
| H 22 | 12,071 | 1 | 0 | 5 | 14 | 18 | 2 | 85% | 9 | 7 | VI |
| 3% | 0% | 13% | 35% | 45% | 5% | ||||||
| H 23 | 12,485 | 1 | 0 | 6 | 14 | 19 | 1 | 83% | 9 | 7 | VI |
| 3% | 0% | 15% | 33% | 48% | 3% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Molinari, S.; Patriarca, R.; Ducci, M. The Challenges of Blood Sample Delivery via Drones in Urban Environment: A Feasibility Study through Specific Operation Risk Assessment Methodology. Drones 2024, 8, 210. https://doi.org/10.3390/drones8050210
Molinari S, Patriarca R, Ducci M. The Challenges of Blood Sample Delivery via Drones in Urban Environment: A Feasibility Study through Specific Operation Risk Assessment Methodology. Drones. 2024; 8(5):210. https://doi.org/10.3390/drones8050210
Chicago/Turabian StyleMolinari, Sara, Riccardo Patriarca, and Marco Ducci. 2024. "The Challenges of Blood Sample Delivery via Drones in Urban Environment: A Feasibility Study through Specific Operation Risk Assessment Methodology" Drones 8, no. 5: 210. https://doi.org/10.3390/drones8050210
APA StyleMolinari, S., Patriarca, R., & Ducci, M. (2024). The Challenges of Blood Sample Delivery via Drones in Urban Environment: A Feasibility Study through Specific Operation Risk Assessment Methodology. Drones, 8(5), 210. https://doi.org/10.3390/drones8050210