
Design and Development of an Air–Land Amphibious Inspection Drone for Fusion Reactor

 ,
, 
Abstract
1. Introduction
2. Design and Modeling of the AAID
2.1. AAID Bionic Design
2.2. Dynamic Modeling
3. Flight and Air–Land Transition Control Design
3.1. Flight Mode Optimal Control
3.1.1. Hovering Control
3.1.2. Flight Control
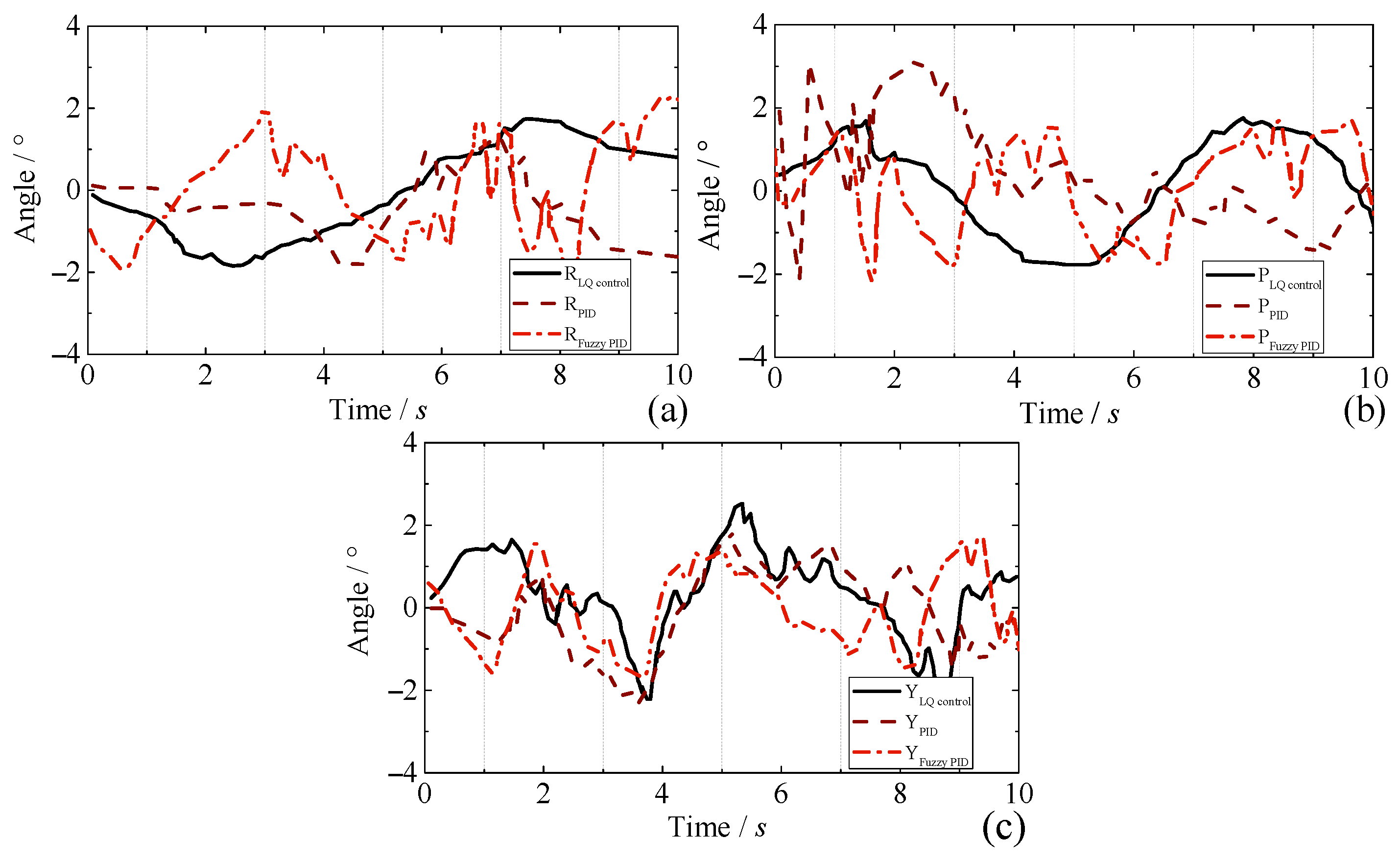
3.1.3. Simulation Analysis
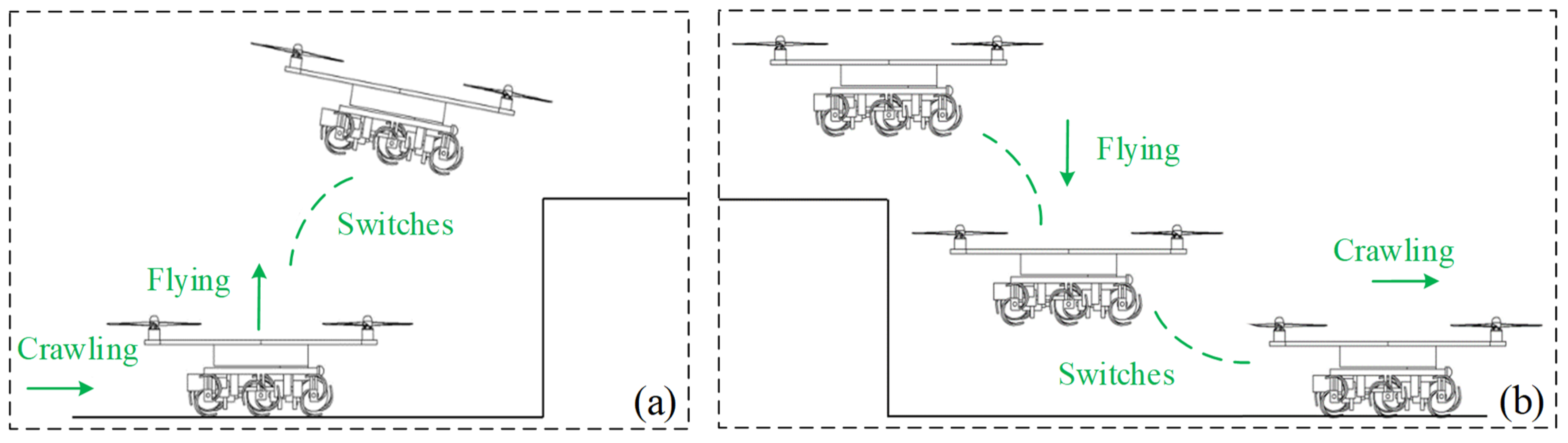
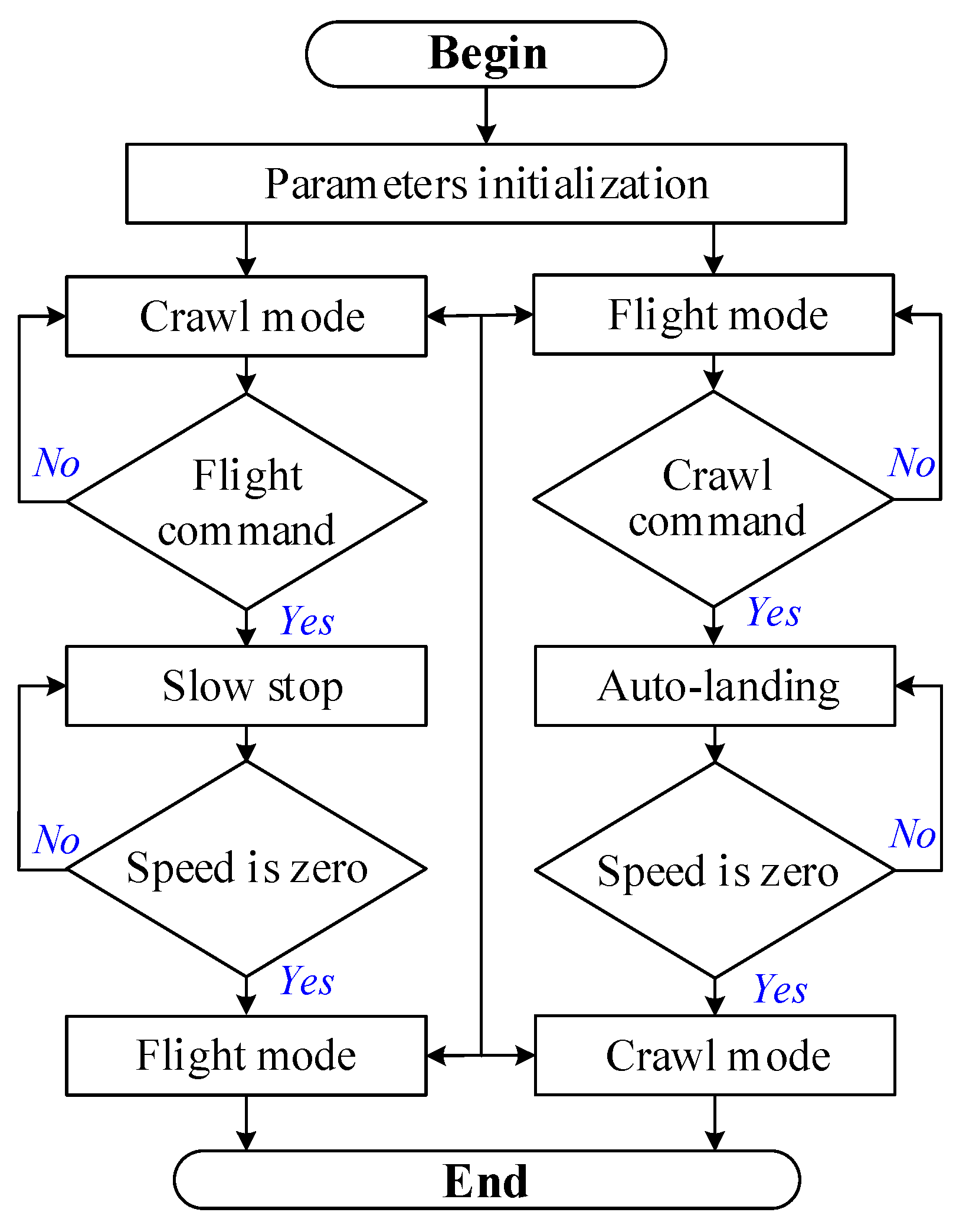
3.2. Flying–Crawling Transition Control
4. Prototype Experiments
4.1. Flying–Crawling Transition Control
4.2. Crawling Experiment
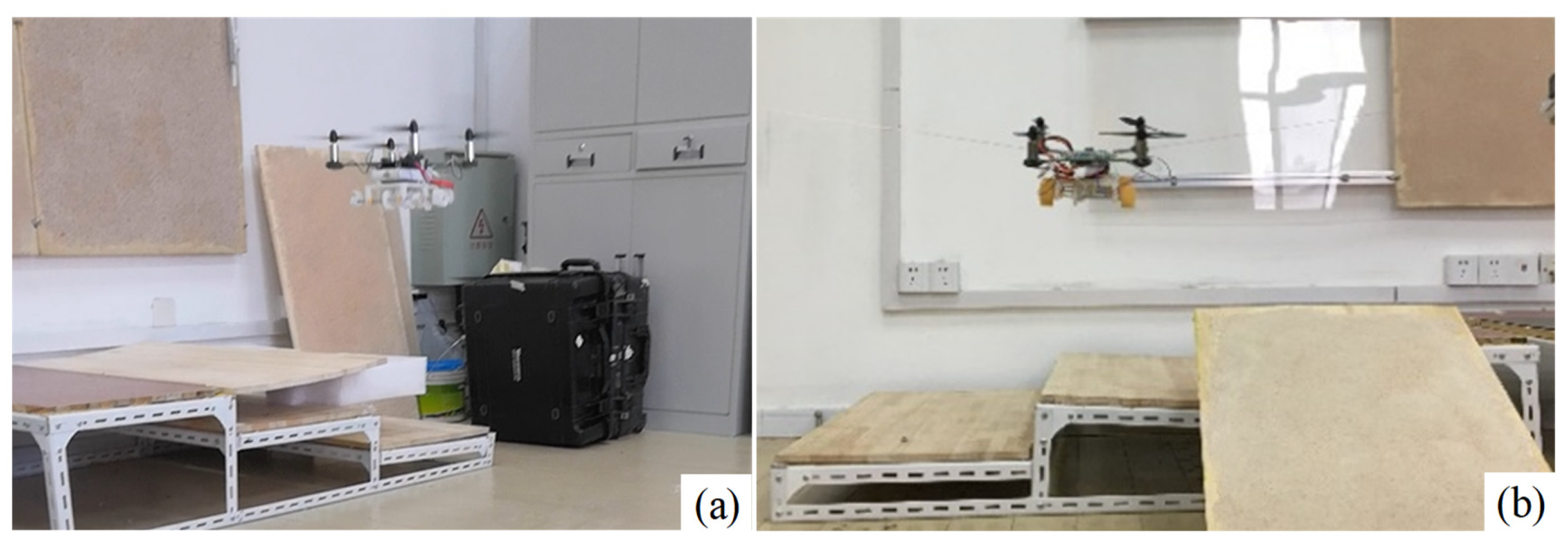
4.3. Hovering Experiment
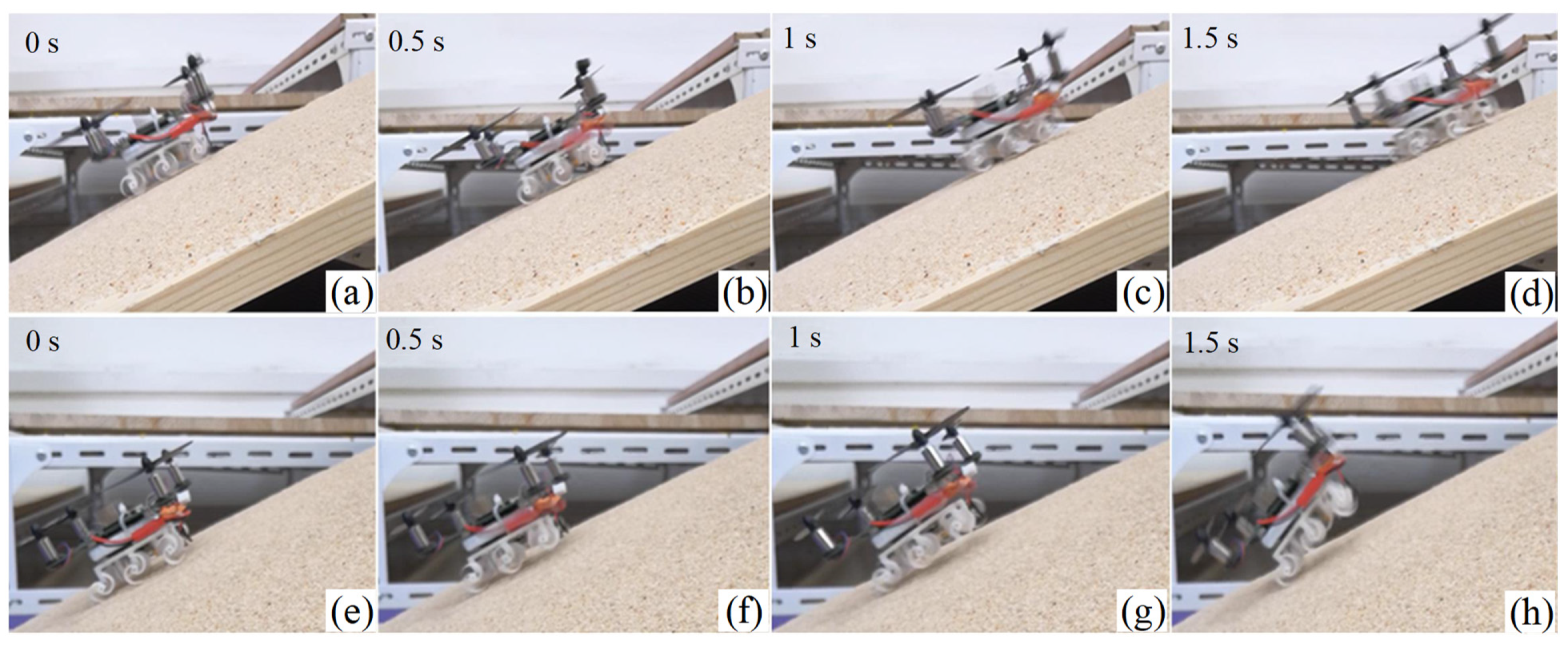
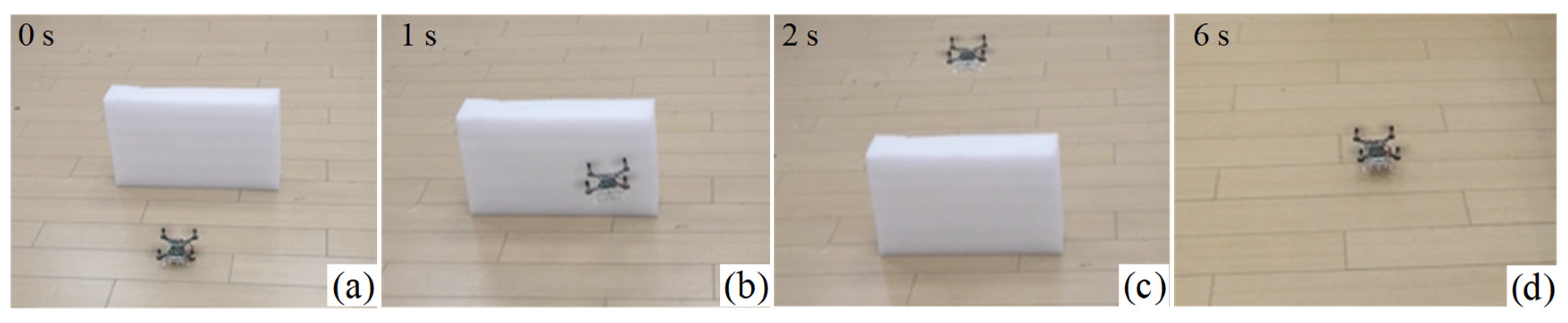
4.4. Fly–Crawling Transition Experiment
5. Conclusions
Supplementary Materials
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Siegel, T.; Kolokotronis, E.; Cifuentes, A.; Matia-Hernando, P.; Sansa, A.; Symeonidou, P.; Bates, P.; Damiani, C.; Dubus, G.; Puiu, A.; et al. In-vessel viewing system prototype performance measurements and simulation of measurement quality across the ITER in-vessel components. Fusion Eng. Des. 2019, 146, 2348–2352. [Google Scholar] [CrossRef]
- Fan, J.; Lu, R.; Yang, X.; Gao, F.; Li, Q.; Zeng, J. Design and implementation of intelligent EOD system based on six-rotor UAV. Drones 2021, 5, 146. [Google Scholar] [CrossRef]
- Cheng, Y.; Song, Y.; Wu, H.; Yang, Y.; Zhang, J.; Pan, H.; Zhao, W.; Zhou, N.; Tang, Y.; Zhang, Y.; et al. Overview of the CFETR remote handling system and the development progress. Fusion Eng. Des. 2022, 177, 113060. [Google Scholar] [CrossRef]
- Dubus, G.P.; Puiu, A.; Bates, P.; Damiani, C.; Reichle, R.; Palmer, J. Progress in the design and R&D of the ITER In-Vessel Viewing and Metrology System (IVVS). Fusion Eng. Des. 2014, 89, 2398–2403. [Google Scholar]
- Vale, A.; Ventura, R.; Carvalho, P. Application of unmanned aerial vehicles for radiological inspection. Fusion Eng. Des. 2017, 124, 492–495. [Google Scholar] [CrossRef]
- Vidyadhara, B.V.; Tony, L.A.; Gadde, M.S.; Jana, S.; Varun, V.P.; Bhise, A.A.; Sundaram, S.; Ghose, D. Design and integration of a drone based passive manipulator for capturing flying targets. Robotica 2022, 40, 2349–2364. [Google Scholar] [CrossRef]
- Du, M.; Li, H.; Roshanianfard, A. Design and experimental study on an innovative UAV-LiDAR topographic mapping system for precision land levelling. Drones 2022, 6, 403. [Google Scholar] [CrossRef]
- Qin, G.; Cheng, Y.; Ji, A.; Pan, H.; Yang, Y.; Yao, Z.; Song, Y. Research on the cable-driven endoscopic manipulator for fusion reactors. Nucl. Eng. Technol. 2024, 56, 498–505. [Google Scholar] [CrossRef]
- Takahashi, N.; Yamashita, S.; Sato, Y.; Kutsuna, Y.; Yamada, M. All round two-wheeled quadrotor helicopters with protect-frames for air land–sea vehicle (controller design and automatic charging equipment). Adv. Robot. 2015, 29, 69–87. [Google Scholar] [CrossRef]
- Hassanalian, M.; Abdelkefi, A. Classifications, applications, and design challenges of drones: A review. Prog. Aerosp. Sci. 2017, 91, 99–131. [Google Scholar] [CrossRef]
- Delmerico, J.; Mintchev, S.; Giusti, A.; Gromov, B.; Melo, K.; Horvat, T.; Cadena, C.; Hutter, M.; Ijspeert, A.; Floreano, D.; et al. The current state and future outlook of rescue robotics. J. Field Robot. 2019, 36, 1171–1191. [Google Scholar] [CrossRef]
- Bloss, R. By air, land and sea, the unmanned vehicles are coming. Ind. Robot. 2007, 34, 12–16. [Google Scholar] [CrossRef]
- Zhu, H.; Wei, S.; Nie, H.; Du, Y.; Wei, X. Ground Effect on the Thrust Performance of Staggered Rotor System. Drones 2024, 8, 118. [Google Scholar] [CrossRef]
- Shim, D.H.; Han, J.S.; Yeo, H.T. A development of unmanned helicopters for industrial applications. J. Intell. Robot. Syst. 2009, 54, 407–421. [Google Scholar] [CrossRef]
- Ghaffari, M.; Ali, S.M.A.; Murthy, V.; Liao, X.; Gaylor, J.; Hall, E.L. Design of an unmanned ground vehicle, bearcat iii, theory and practice. J. Robot. Syst. 2004, 21, 471–480. [Google Scholar] [CrossRef]
- Tranzatto, M.; Miki, T.; Dharmadhikari, M.; Bernreiter, L.; Kulkarni, M.; Mascarich, F.; Andersson, O.; Khattak, S.; Hutter, M.; Siegwart, R.; et al. CERBERUS in the DARPA subterranean challenge. Sci. Robot. 2022, 7, eabp9742. [Google Scholar] [CrossRef]
- Jenkinson, L.R.; Marchman, J.F. Aircraft Design Projects: For Engineering Students; Elsevier: Amsterdam, The Netherlands, 2003. [Google Scholar]
- Sanchez-Rodriguez, J.P.; Aceves-Lopez, A. A survey on stereo vision-based autonomous navigation for multi-rotor MUAVs. Robotica 2018, 36, 1225–1243. [Google Scholar] [CrossRef]
- Bachmann, R.J.; Boria, F.J.; Vaidyanathan, R.; Ifju, P.G.; Quinn, R.D. A biologically inspired micro-vehicle capable of aerial and terrestrial locomotion. Mech. Mach. Theory 2009, 44, 513–526. [Google Scholar] [CrossRef]
- Ma, H.; Gong, P.; Tian, Y.; Wu, Q.; Pan, M.; Yin, H.; Liu, Y.; Chen, C. HiFly-Dragon: A Dragonfly Inspired Flapping Flying Robot with Modified, Resonant, Direct-Driven Flapping Mechanisms. Drones 2024, 8, 126. [Google Scholar] [CrossRef]
- Floreano, D.; Wood, R.J. Science, technology and the future of small autonomous drones. Nature 2015, 521, 460–466. [Google Scholar] [CrossRef]
- Gugan, G.; Haque, A. Path Planning for Autonomous Drones: Challenges and Future Directions. Drones 2023, 7, 169. [Google Scholar] [CrossRef]
- Chopra, I. Small UAS and Delivery Drones: Challenges and Opportunities The 38th Alexander A. Nikolsky Honorary Lecture. J. Am. Helicopter Soc. 2021, 66, 1–41. [Google Scholar] [CrossRef]
- Saranli, U.; Buehler, M.; Koditschek, D. RHex a simple and highly mobile hexapod robot. Int. J. Robot. Res. 2001, 20, 616–631. [Google Scholar] [CrossRef]
- Lin, C.; He, D.; Kumar, N.; Choo, K.-K.R.; Vinel, A.; Huang, X. Security and privacy for the internet of drones: Challenges and solutions. IEEE Commun. Mag. 2018, 56, 64–69. [Google Scholar] [CrossRef]
- Evangeliou, N.; Chaikalis, D.; Giakoumidis, N.; Tzes, A. Mechatronic Design of an Amphibious Drone. In Proceedings of the 2023 9th International Conference on Automation, Robotics and Applications, Abu Dhabi, United Arab Emirates, 10–12 February 2023; pp. 230–233. [Google Scholar]
- Borisov, A.V.; Kilin, A.A.; Mamaev, I.S. Dynamics and control of an omniwheel vehicle. Regul. Chaotic Dyn. 2015, 20, 153–172. [Google Scholar] [CrossRef]
- Baker, M.; Manweiler, J. Drones, robots, and sushi. IEEE Pervasive Comput. 2016, 15, 92–97. [Google Scholar] [CrossRef]
- Daler, L.; Mintchev, S.; Stefanini, C.; Floreano, D. A bioinspired multi-modal flying and walking robot. Bioinspiration Biomim. 2015, 10, 016005. [Google Scholar] [CrossRef]
- Atay, S.; Bryant, M.; Buckner, G. Control and control allocation for bimodal, rotary wing, rolling–flying vehicles. J. Mech. Robot. 2021, 13, 050904. [Google Scholar] [CrossRef]
- Tan, Q.; Zhang, X.; Liu, H.; Jiao, S.; Zhou, M.; Li, J. Multimodal dynamics analysis and control for amphibious fly-drive vehicle. IEEE/ASME Trans. Mechatron. 2021, 26, 621–632. [Google Scholar] [CrossRef]
- Zhang, R.; Wu, Y.; Zhang, L.; Xu, C.; Gao, F. Autonomous and adaptive navigation for terrestrial-aerial bimodal vehicles. IEEE Robot. Autom. Lett. 2022, 7, 3008–3015. [Google Scholar] [CrossRef]
- Michael, N.; Shen, S.; Mohta, K.; Kumar, V.; Nagatani, K.; Okada, Y.; Kiribayashi, S.; Otake, K.; Yoshida, K.; Ohno, K.; et al. Collaborative mapping of an earthquake damaged building via ground and aerial robots. Field Serv. Robot. 2014, 92, 33–47. [Google Scholar]
- Grocholsky, B.; Keller, J.; Kumar, V.; Pappas, G. Cooperative air and ground surveillance. IEEE Robot. Autom. Mag. 2006, 13, 16–25. [Google Scholar] [CrossRef]
- Grlj, C.G.; Krznar, N.; Pranjić, M. A decade of UAV docking stations: A brief overview of mobile and fixed landing platforms. Drones 2022, 6, 17. [Google Scholar] [CrossRef]
- Deng, L.; Yang, B.; Dong, X.; Cui, Y.; Gao, Y.; Li, D.; Tu, Z. Self-Spin Enabled Docking and Detaching of a UAV-UGV System for Aerial-Terrestrial Amphibious and Independent Locomotion. IEEE Robot. Autom. Lett. 2023, 8, 2454–2461. [Google Scholar] [CrossRef]
- De Silva, S.C.; Phlernjai, M.; Rianmora, S.; Ratsamee, P. Inverted docking station: A conceptual design for a battery-swapping platform for quadrotor UAVs. Drones 2022, 6, 56. [Google Scholar] [CrossRef]
- Çakici, F.; Leblebicioğlu, M.K. Control system design of a vertical take-off and landing fixed-wing UAV. IFAC-Pap. 2016, 49, 267–272. [Google Scholar] [CrossRef]
- Alhadi, S.; Rianmora, S.; Phlernjai, M. Conceptual design and analysis of small power station for supporting unmanned aerial vehicle (UAV) deployment. Eng. J. 2021, 25, 51–71. [Google Scholar] [CrossRef]
- Galimov, M.; Fedorenko, R.; Klimchik, A. UAV positioning mechanisms in landing stations: Classification and engineering design review. Sensors 2020, 20, 3648. [Google Scholar] [CrossRef]
- Lu, H.; Tadoh, R.; Li, Y.; Guna, J.; Serikawa, S. Proposal of a power-saving unmanned aerial vehicle. In Proceedings of the 12th EAI International Conference on Testbeds and Research Infrastructures for the Development of Networks & Communities, Dalian, China, 28–29 September 2017; pp. 15–23. [Google Scholar]
- Nekoo, S.R.; Acosta, J.Á.; Ollero, A. Quaternion-based state-dependent differential Riccati equation for quadrotor drones: Regulation control problem in aerobatic flight. Robotica 2022, 40, 3120–3135. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Items | Parameters |
|---|---|
| Magnetic field during inspection | |
| Magnetic field during storage | |
| Pressure during the storage | ≤ |
| Pressure during inspection | Atmospheric pressure, dry air, or nitrogen |
| Drone size requirements | ≤ |
| Storage pipeline transport mode | Auto-crawl |
| Inspection process movement mode | Auto-flight |
| 0.5–4 m normal observation accuracy | ≤ |
| Items | Parameters |
|---|---|
| Wheel-leg mass | ≤ |
| Chassis size | |
| Wheel-leg size | |
| Crawling speed | > |
| Crawling ability | ≥ |
| Overrun height | ≥ |
| No. | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 |
|---|---|---|---|---|---|---|---|---|---|
| Distance/mm | 128 | 135 | 120 | 139 | 119 | 130 | 128 | 125 | 133 |
| Success rate | Y | Y | N | Y | Y | N | Y | Y | Y |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Qin, G.; Xu, Y.; He, W.; Qi, Q.; Zheng, L.; Hu, H.; Cheng, Y.; Zuo, C.; Zhang, D.; Ji, A. Design and Development of an Air–Land Amphibious Inspection Drone for Fusion Reactor. Drones 2024, 8, 190. https://doi.org/10.3390/drones8050190
Qin G, Xu Y, He W, Qi Q, Zheng L, Hu H, Cheng Y, Zuo C, Zhang D, Ji A. Design and Development of an Air–Land Amphibious Inspection Drone for Fusion Reactor. Drones. 2024; 8(5):190. https://doi.org/10.3390/drones8050190
Chicago/Turabian StyleQin, Guodong, Youzhi Xu, Wei He, Qian Qi, Lei Zheng, Haimin Hu, Yong Cheng, Congju Zuo, Deyang Zhang, and Aihong Ji. 2024. "Design and Development of an Air–Land Amphibious Inspection Drone for Fusion Reactor" Drones 8, no. 5: 190. https://doi.org/10.3390/drones8050190
APA StyleQin, G., Xu, Y., He, W., Qi, Q., Zheng, L., Hu, H., Cheng, Y., Zuo, C., Zhang, D., & Ji, A. (2024). Design and Development of an Air–Land Amphibious Inspection Drone for Fusion Reactor. Drones, 8(5), 190. https://doi.org/10.3390/drones8050190