
Multi-Sensor 3D Survey: Aerial and Terrestrial Data Fusion and 3D Modeling Applied to a Complex Historic Architecture at Risk



Abstract
1. Introduction
The Case Study: The Medieval Castle of Frinco
2. Metric Survey and Quality Check
2.1. Surveying Equipment
2.2. Working Planning
2.3. Control Network Adjustment
- Data collection and surveying using Trimble AccessTM (TA)
- Exportation of *.job file and subsequent importation into Trimble Business CenterTM (TBC)
- Establishment of control points and execution of network adjustment
- Optional exportation of scans to Trimble RealworksTM (version 12.0)
- Repetition of steps 1–4 until the completion of the survey.
3. Point Cloud Alignment Methods Outdoor/Indoor
- Methods for checking the scan alignment;
- Possibility of checking and refining the scan direct orientation by scan-to-scan alignment;
- Accuracy checks for direct scan alignment for the purposes of surveying the architectural context.
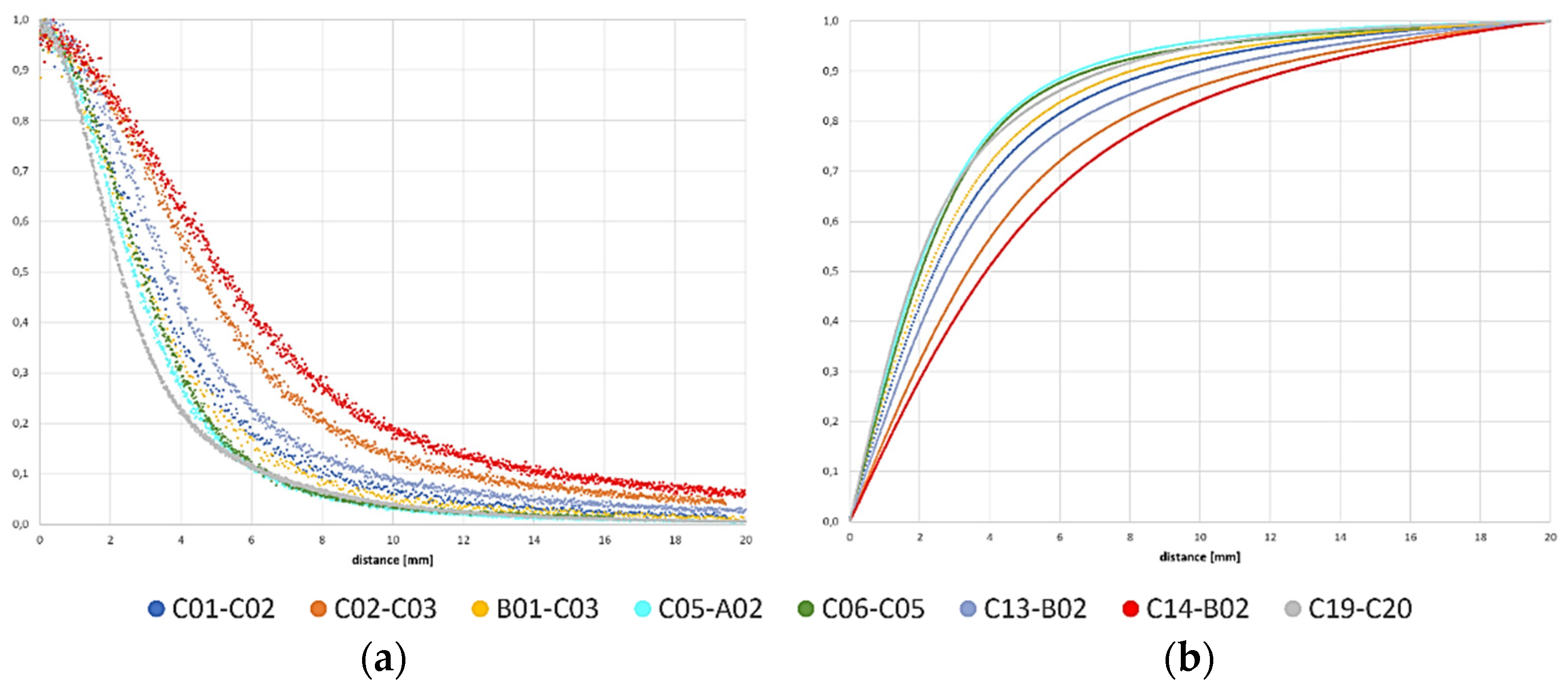
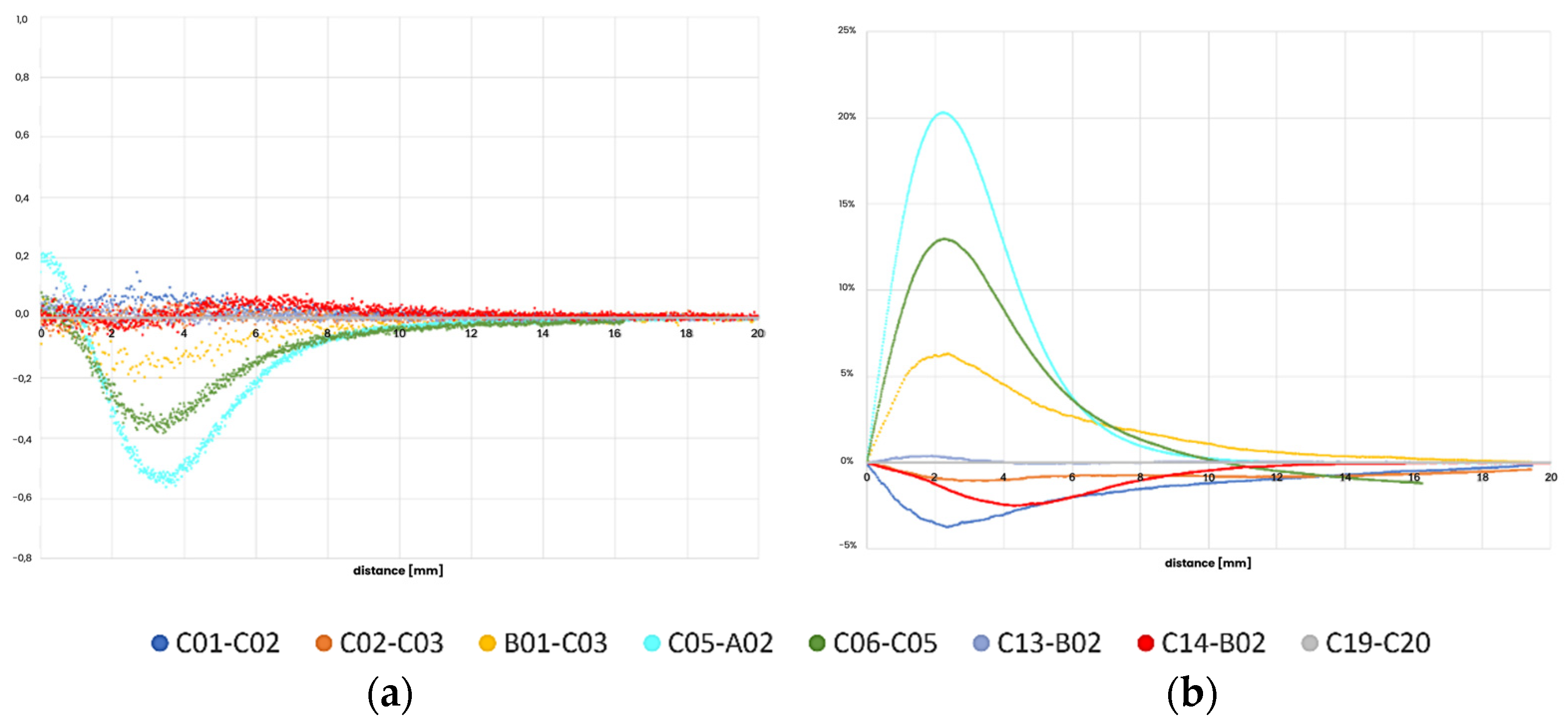
Scan Alignment Check
- Octree level: Auto;
- Maximum distance: 0.02 m (larger distances are attributed to non-overlapping cloud areas);
- Local model: quadric (in order to reduce the noise effect);
- Points (kNN): 6.
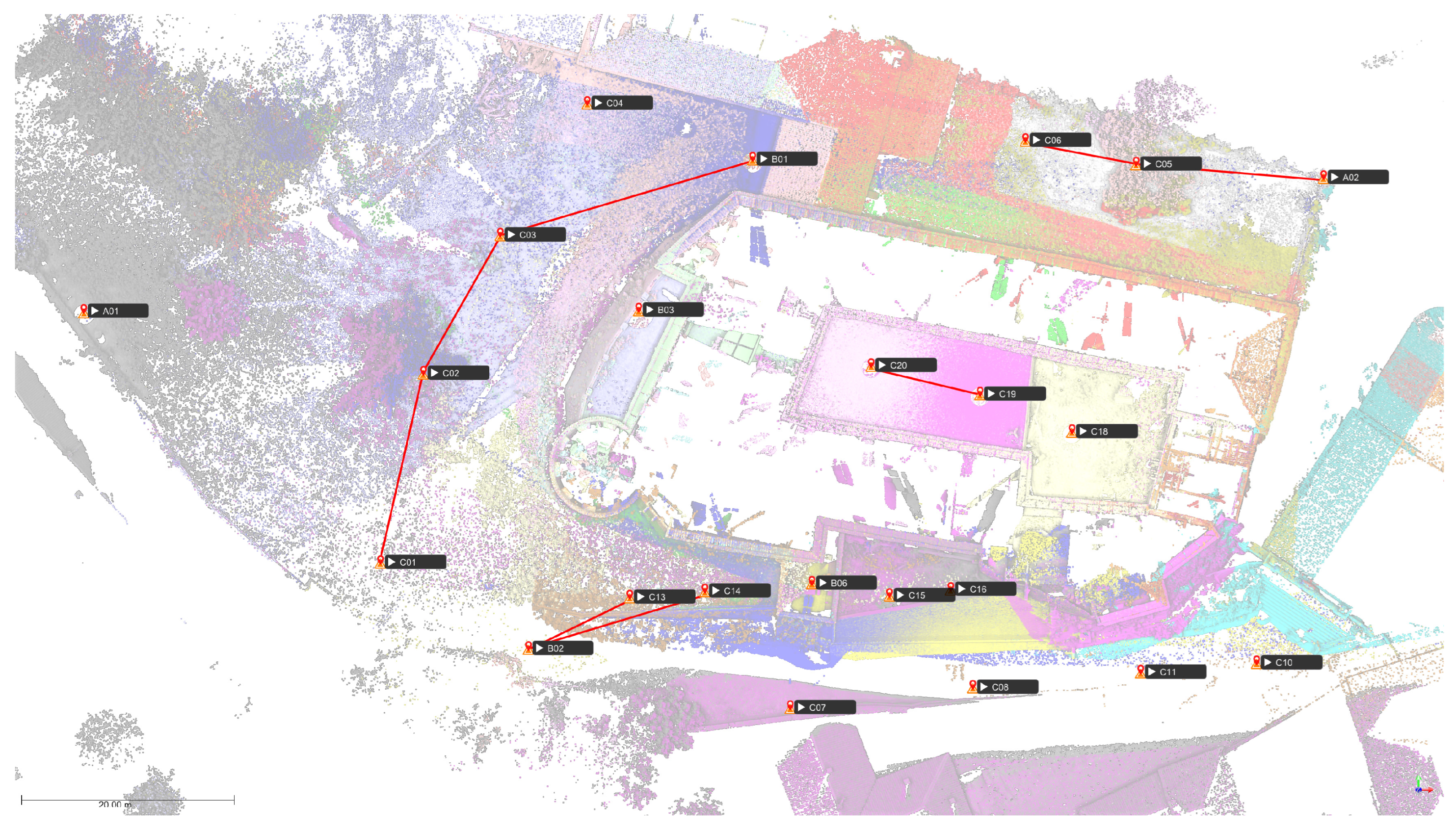
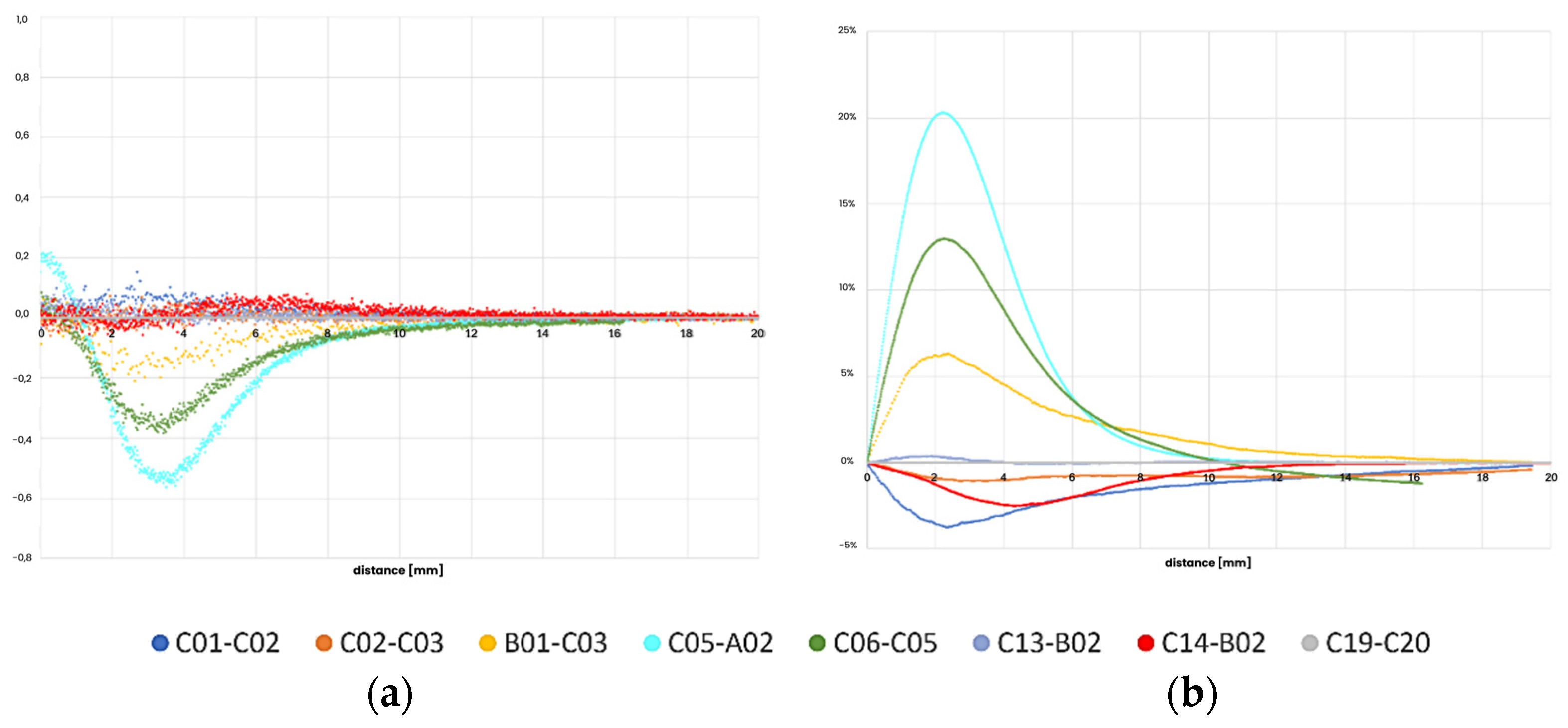
- The horizontal coordinates of C05 were, however, determined with an accuracy of 4 mm with respect to A02, and the vertical coordinate with an accuracy of 2 mm;
- Station C05 has been oriented on B01 and not on A02, so the two stations are not directly connected;
- A station orientation error can lead to cloud-to-cloud misalignment, even if the coordinates of the instrumental origin are known without errors.
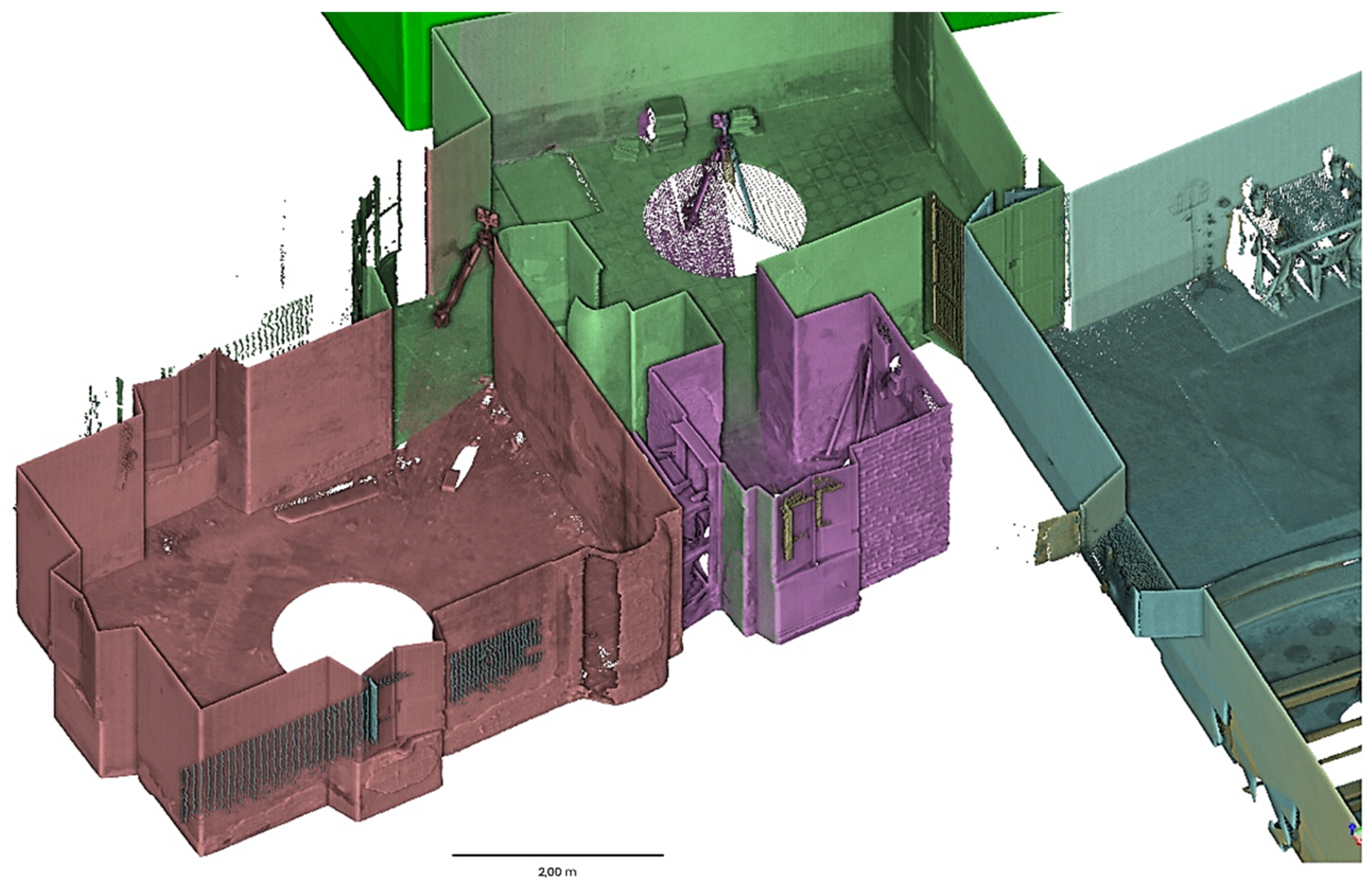
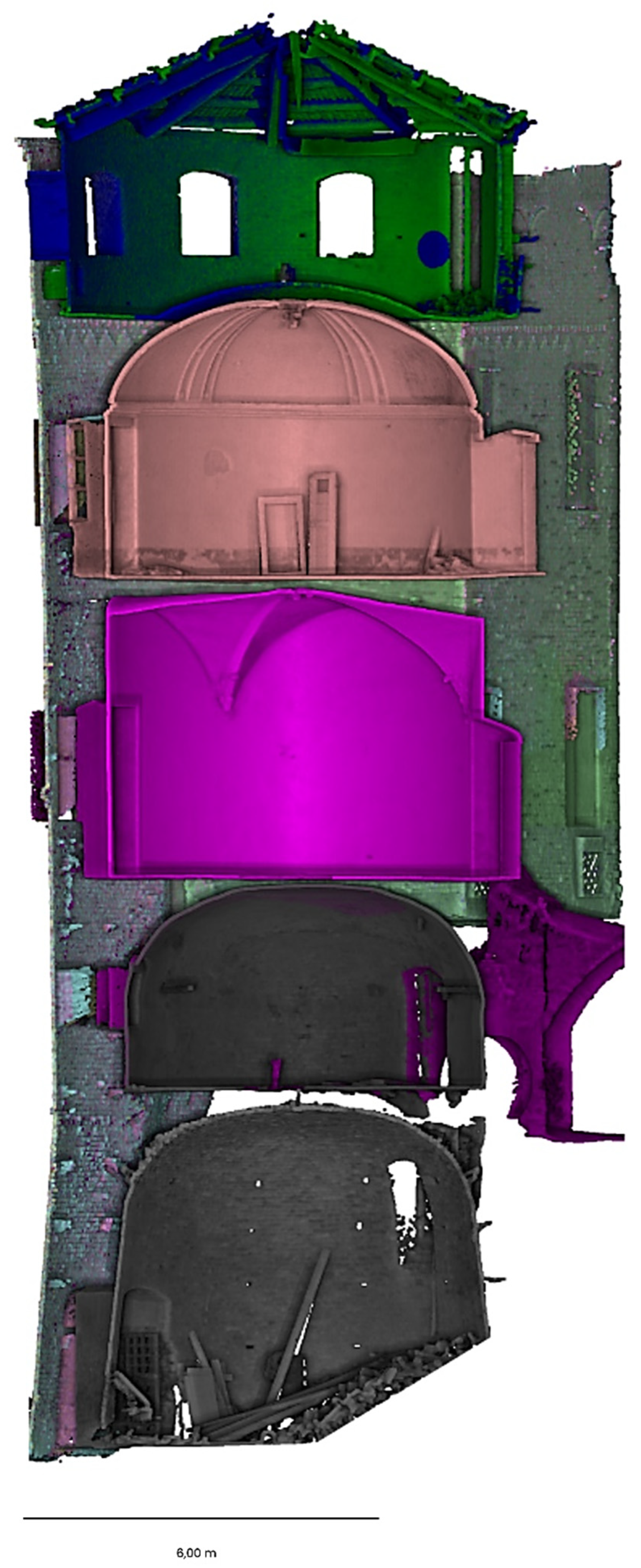
- Exclude the indoor portion from the indoor scan. When combining indoor and outdoor scans, alignment and registration become critical. Excluding the indoor part simplifies this process, reducing the number of variables to consider and focusing on the relevant data.
- Restrict the outdoor point cloud to the indoor bounding box.
- Approximatively restrict the outdoor point cloud to the overlapping area, if any.
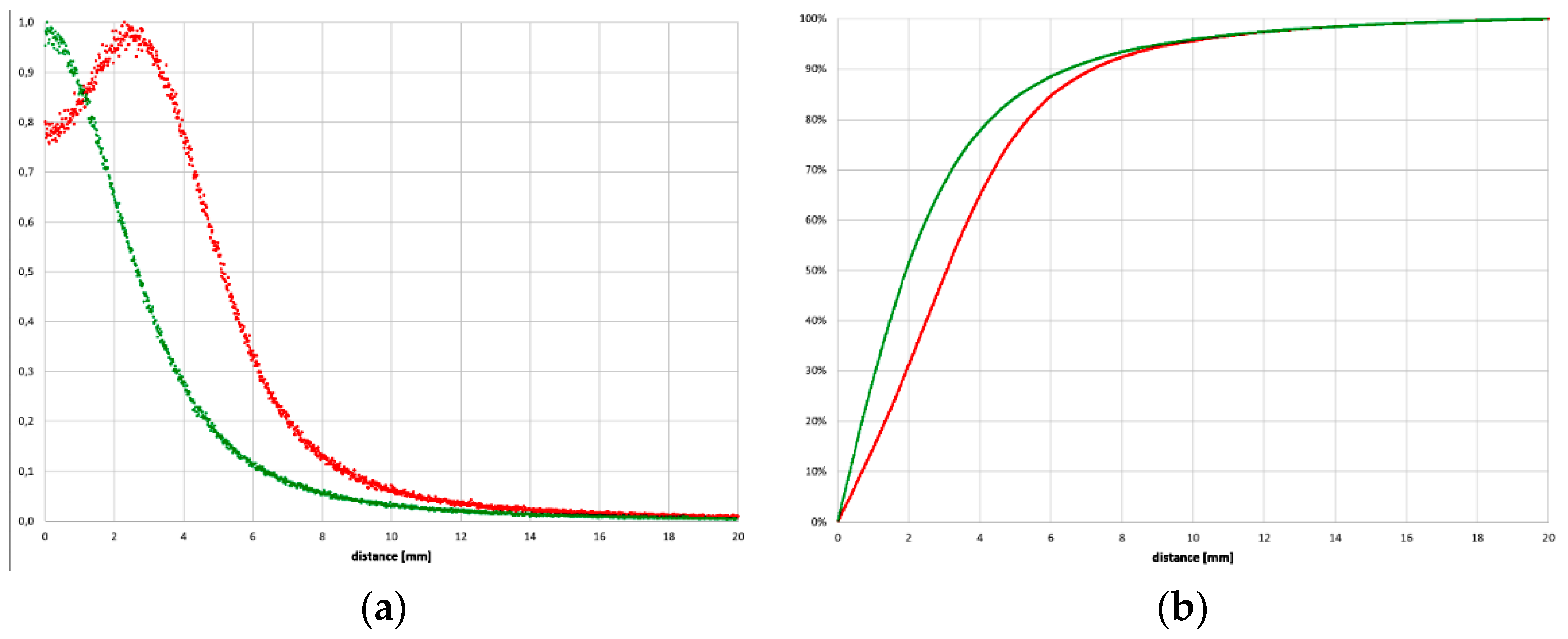
- Compute the indoor/outdoor cloud-to-cloud distance, taking the indoor one as the reference cloud.
- The points with a cloud-to-cloud distance larger than 0.05 m are excluded from the outdoor cloud to extract the common patch.
- Compute the indoor/outdoor cloud-to-cloud distance, taking the outdoor one as the reference cloud.
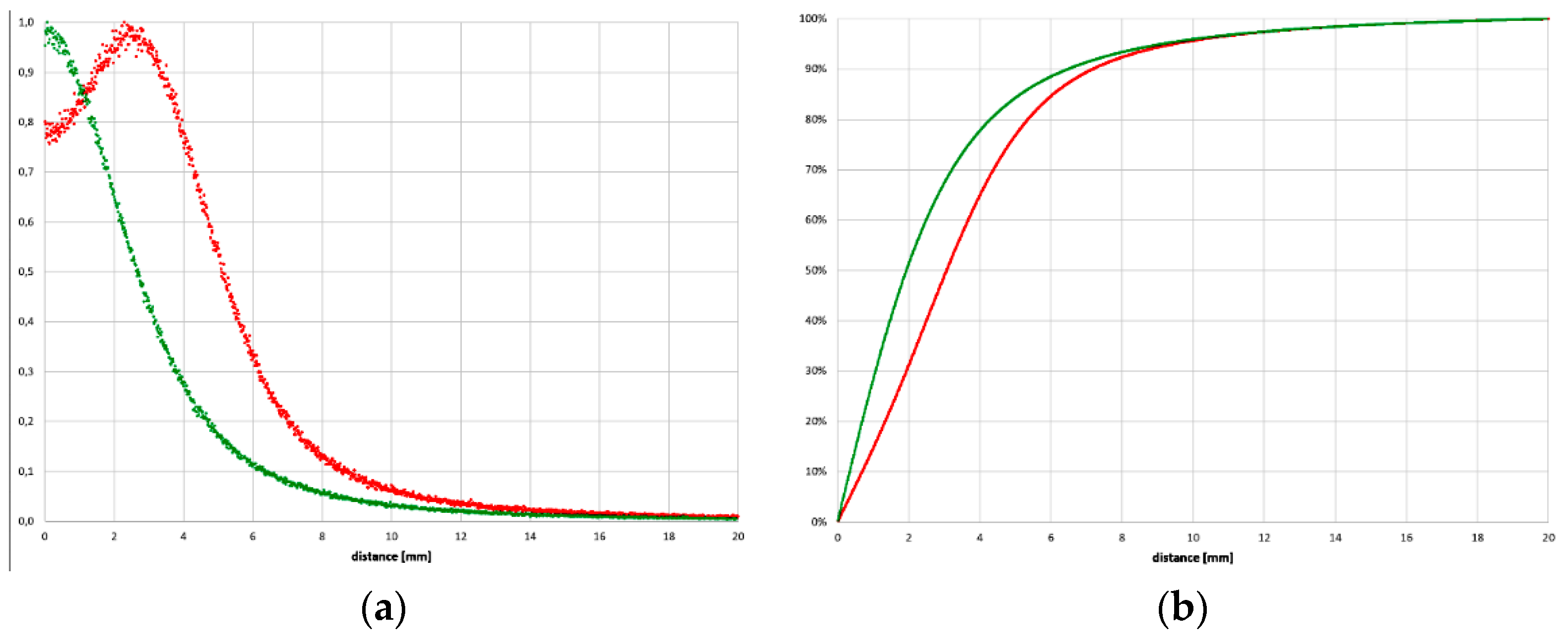
- Filter the outdoor cloud by distance scalar field, selecting the range (0.00–0.02 m) to be used for the statistical analysis.
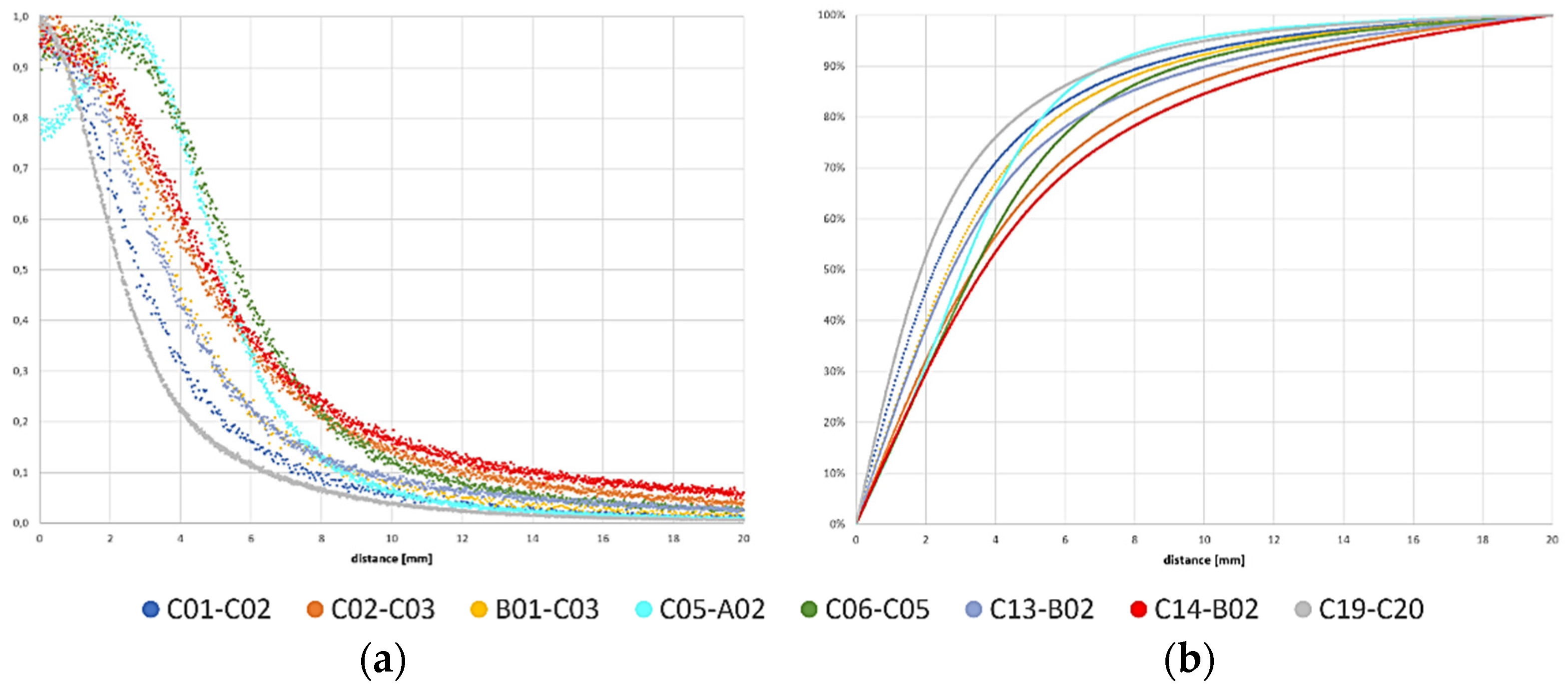
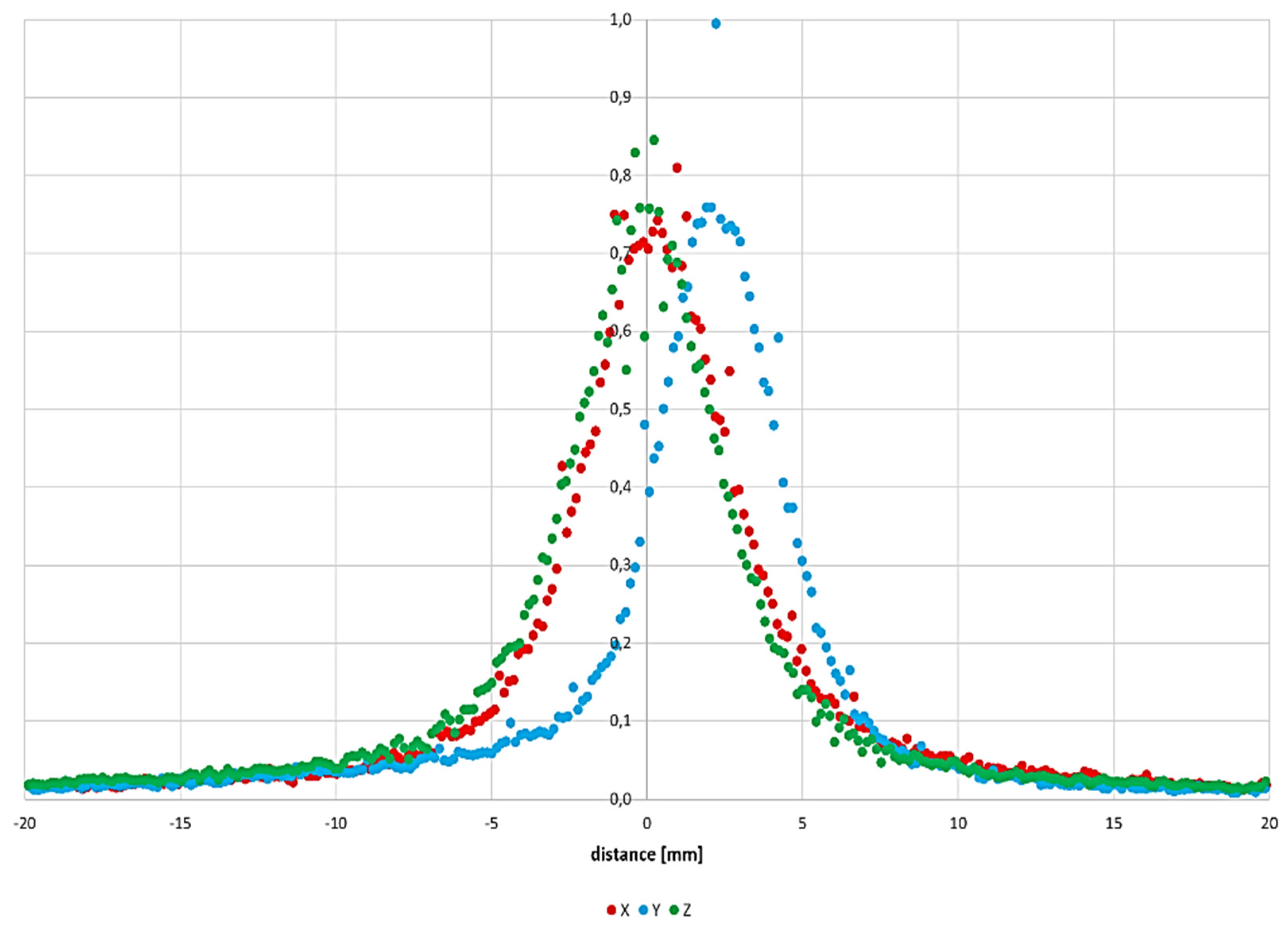
- Compute the cloud-to-cloud distance distribution and the fi and Fi statistics.
4. Data Fusion
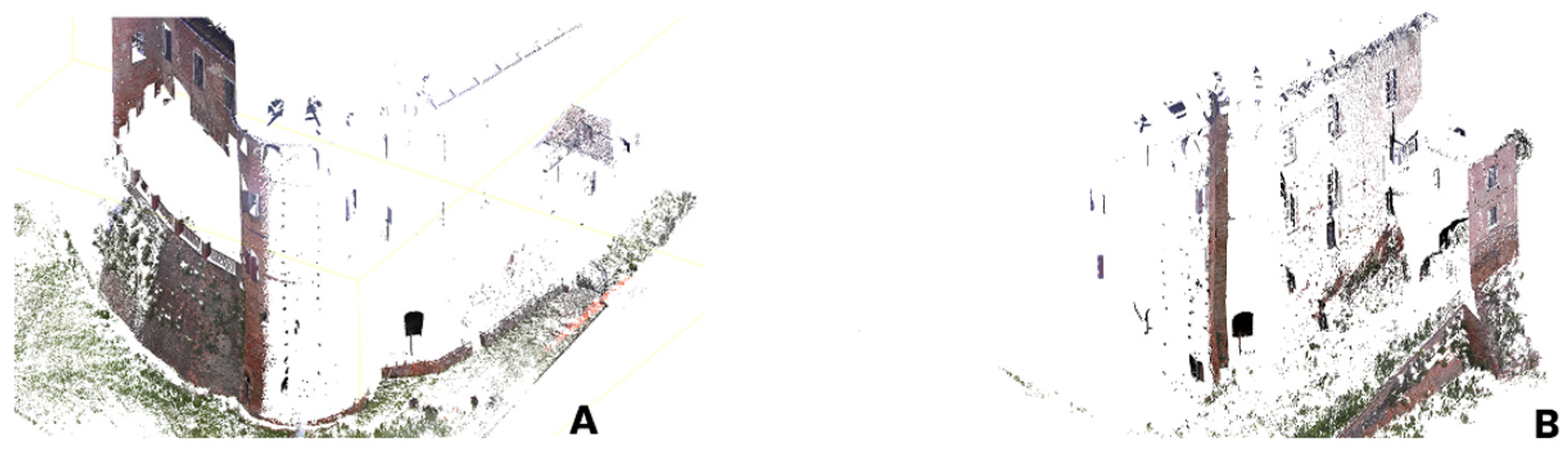
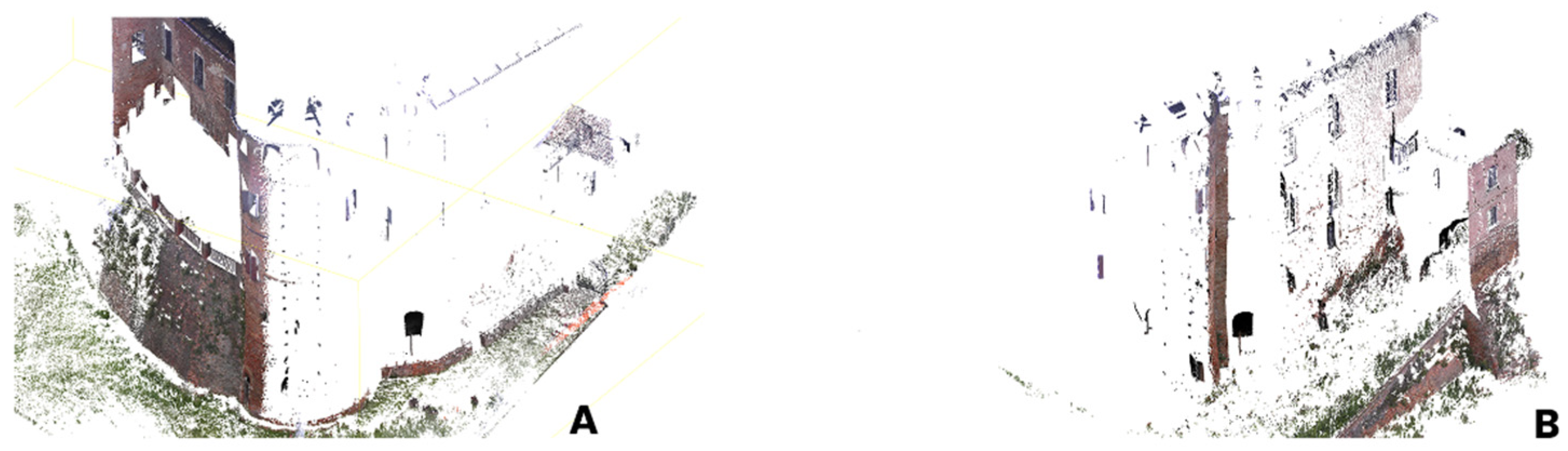
4.1. Terrestrial Scans
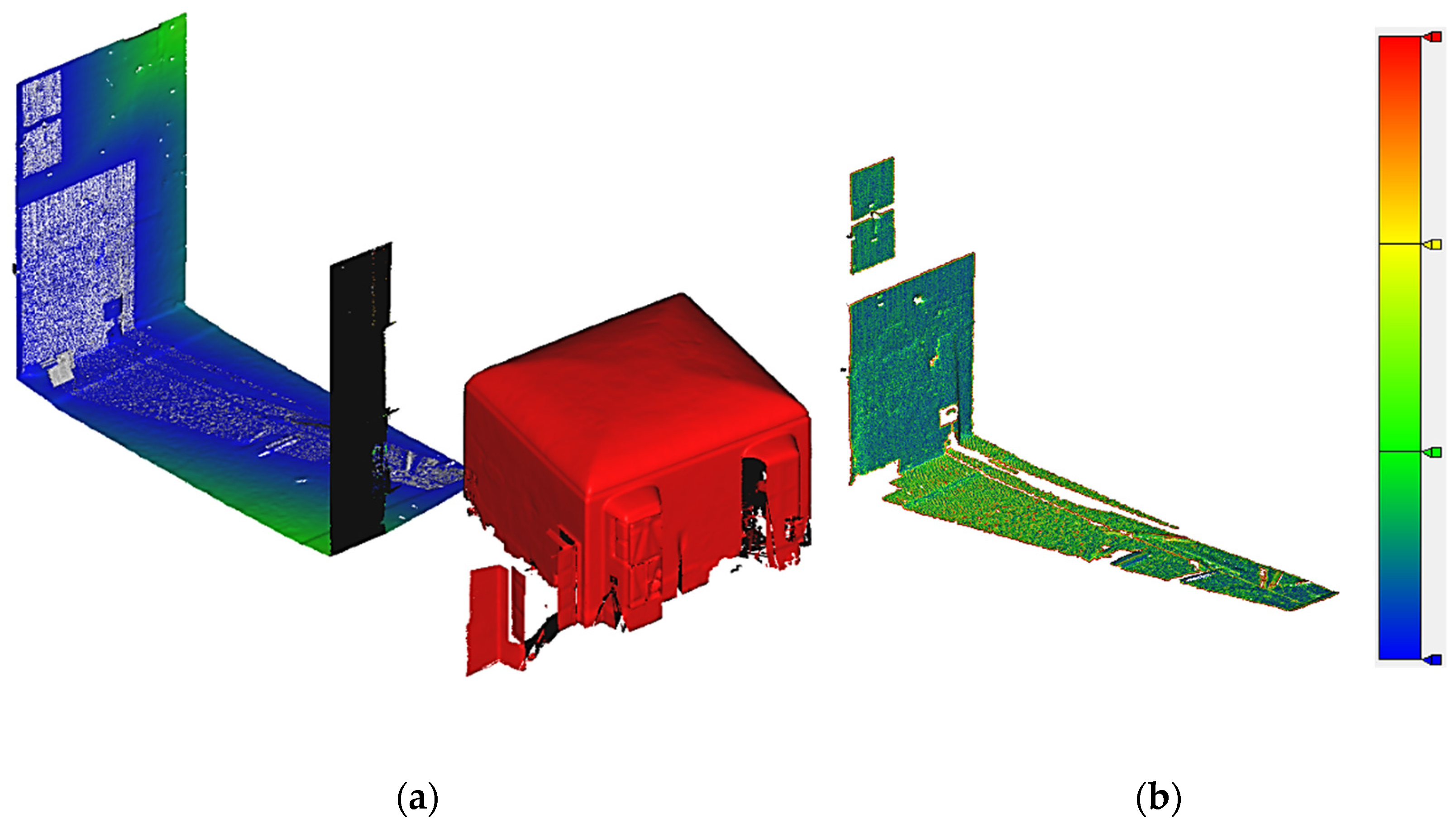
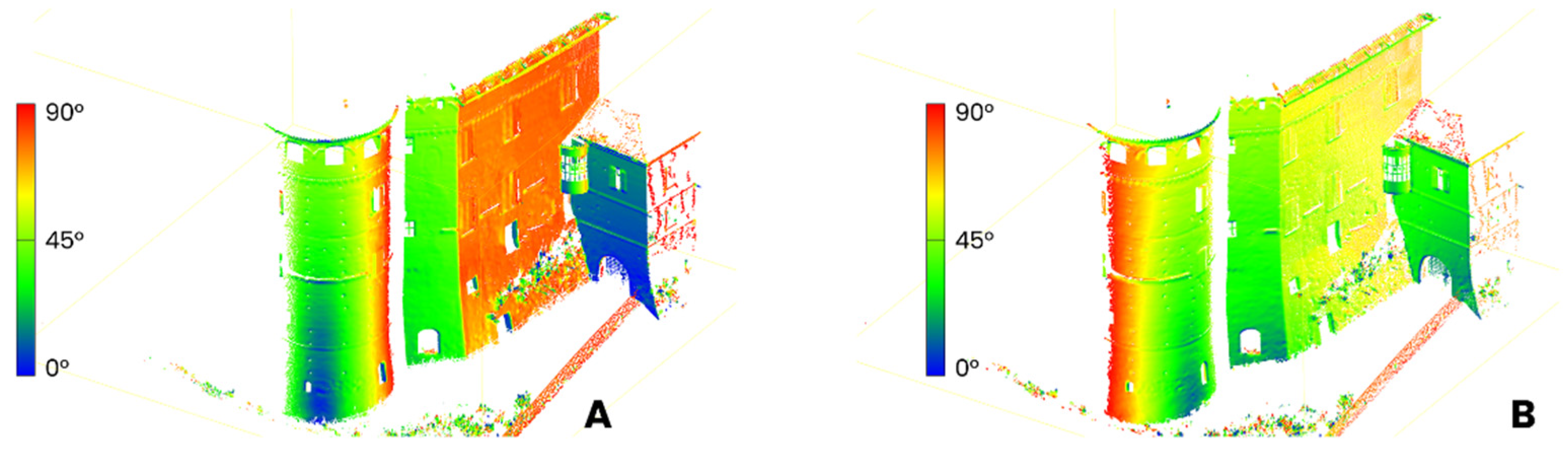
- Specular reflection: The reflectivity of a surface can change depending on the angle of incidence of the laser beam. For example, when the laser beam hits the surface at an acute angle, there is a greater probability that the beam will not be reflected toward the scanner but in a different direction, leading to a lack of data from that particular surface area.
- Geometric distortion: Sharp angles of incidence can cause geometric distortion because the laser spot is larger than when the beam hits the surface perpendicularly.
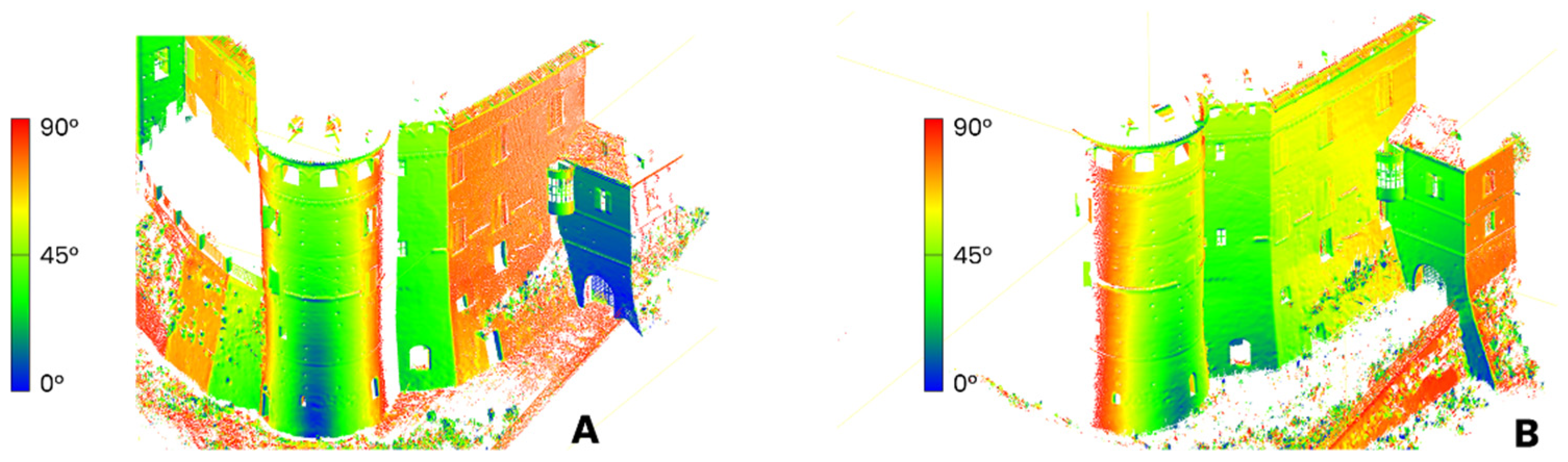
- (1)
- Select and retain the non-overlapping point cloud areas from A and B;
- (2)
- On the overlapping areas:
- (a)
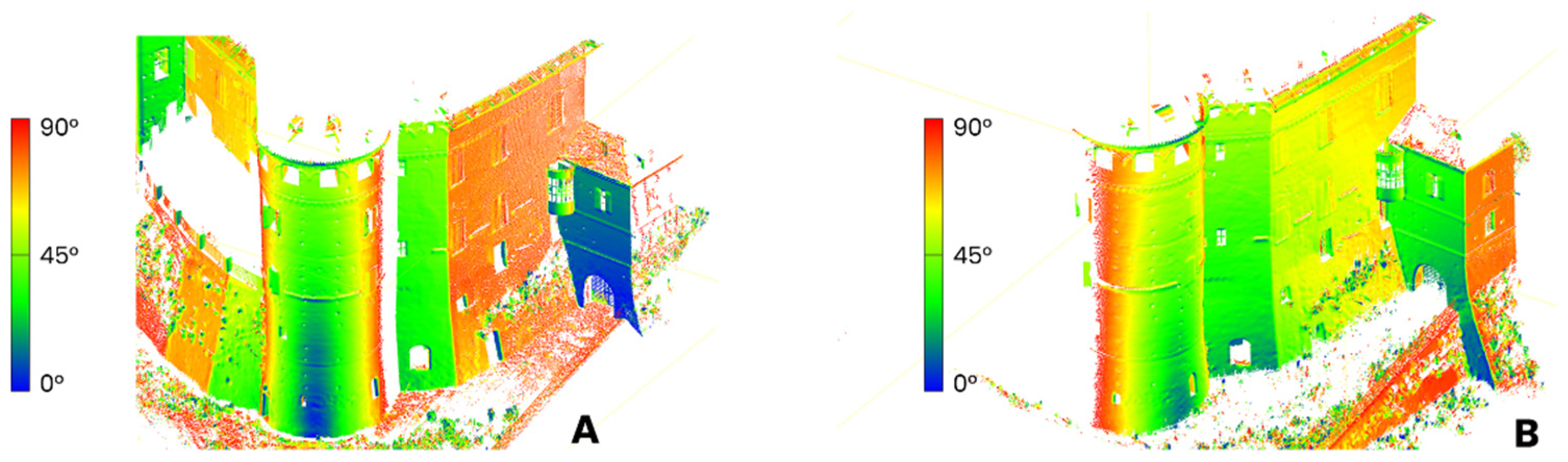
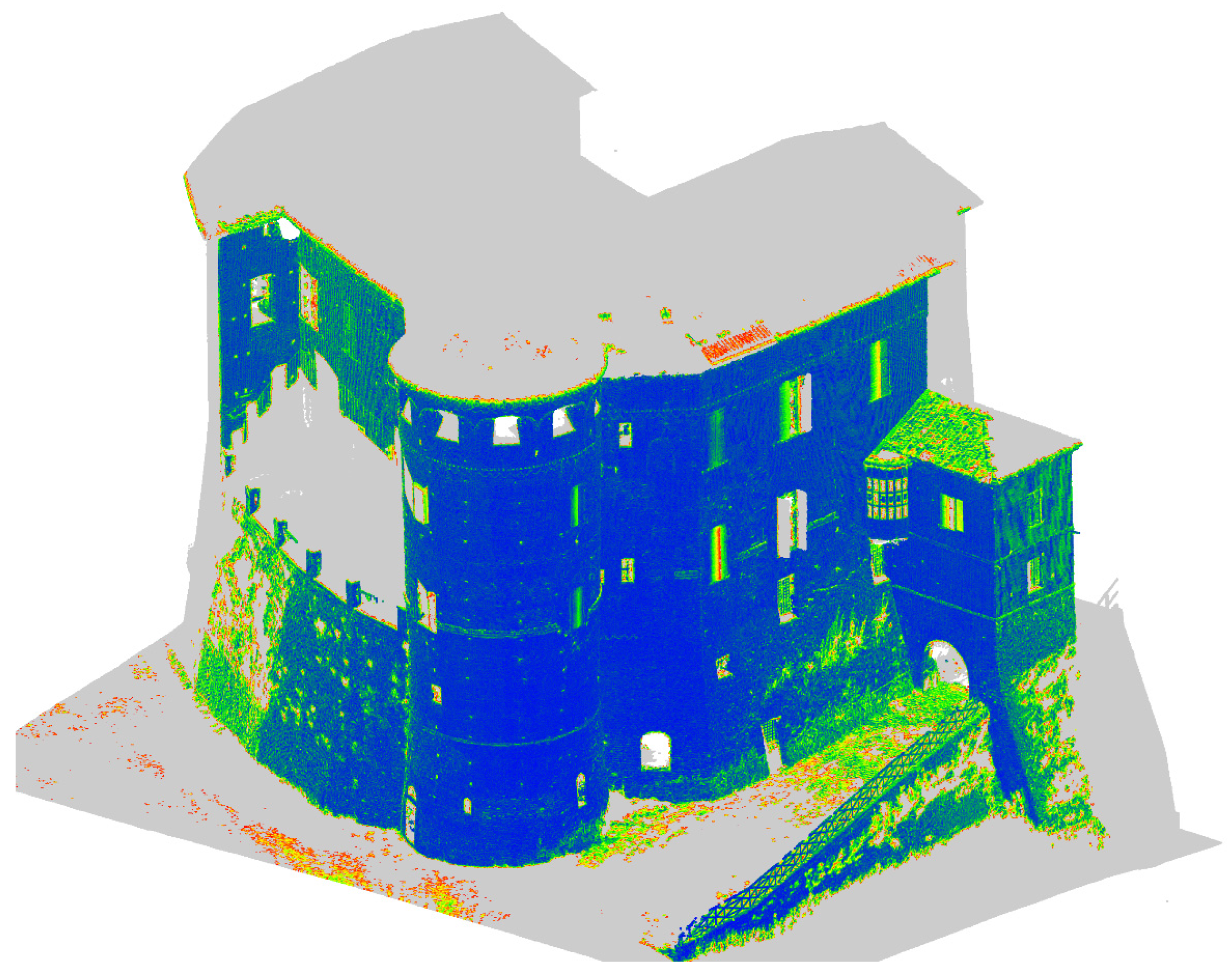
- Compute the incidence angle δ for the two scan A and B;
- (b)
- Choose from A or B the points that have incidence angle lower than a fixed threshold (i.e., 70°).
- (3)
- Merge with non-overlapping point cloud areas from A and B.
4.2. Terrestrial and Airborne Scans
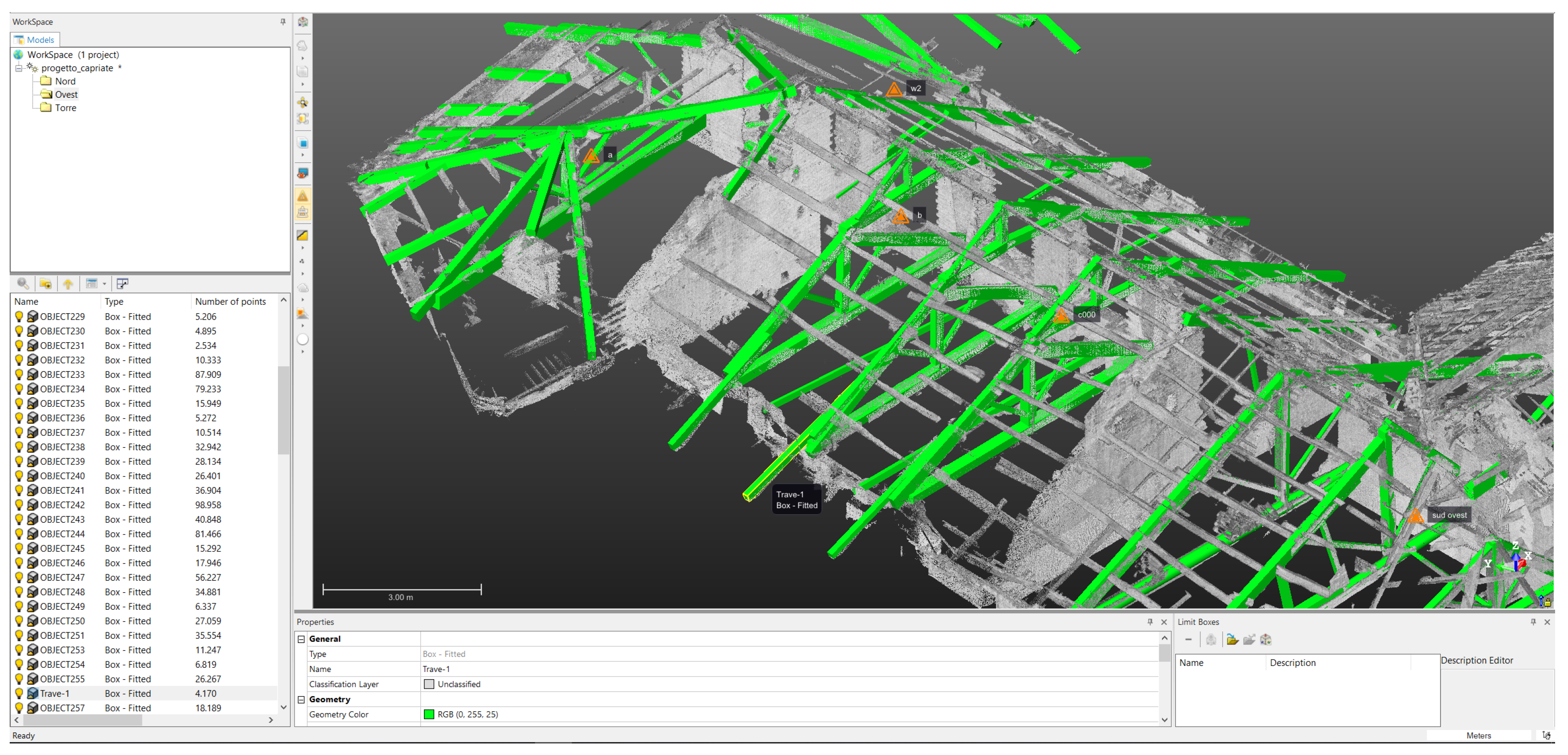
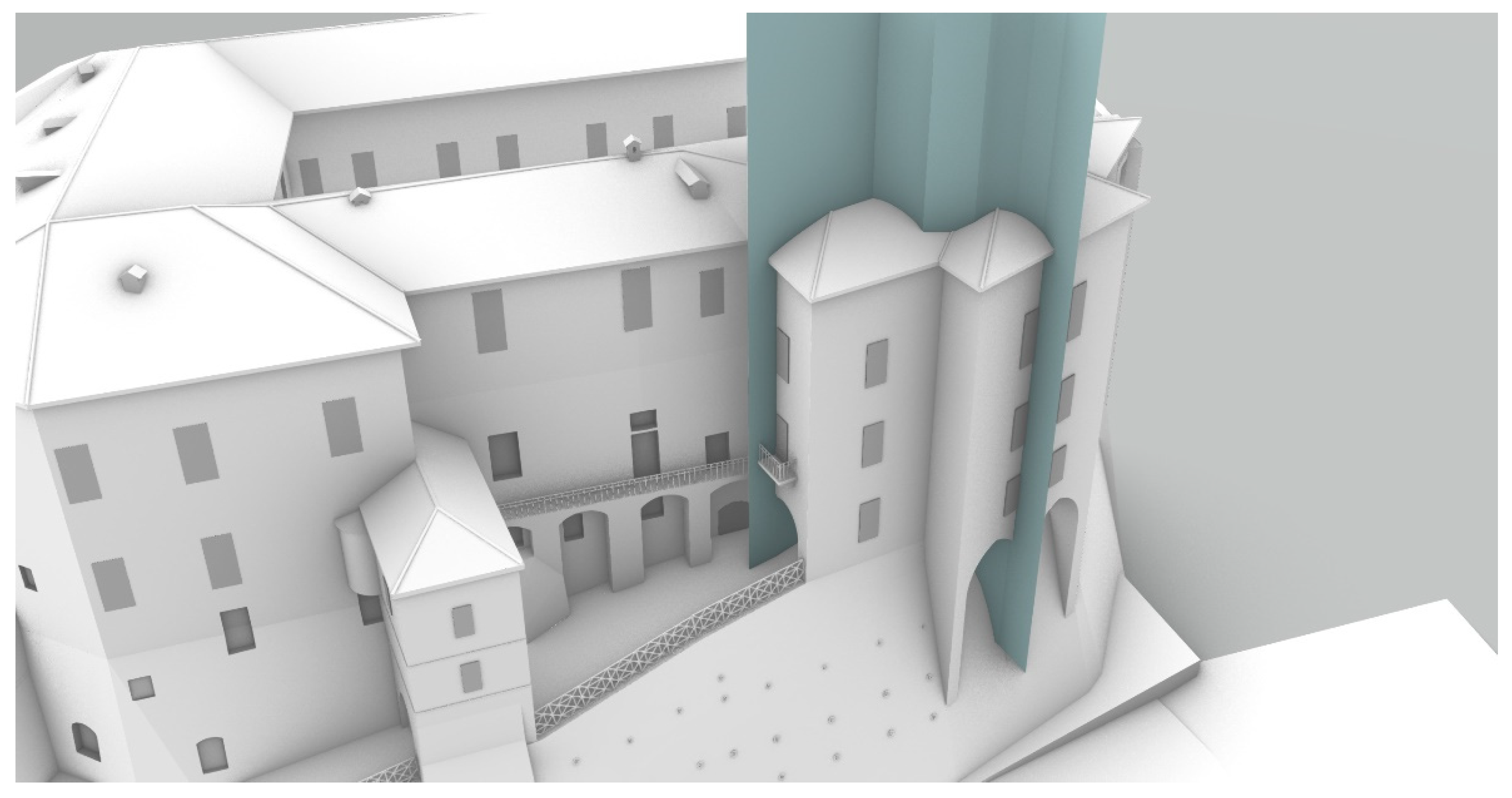
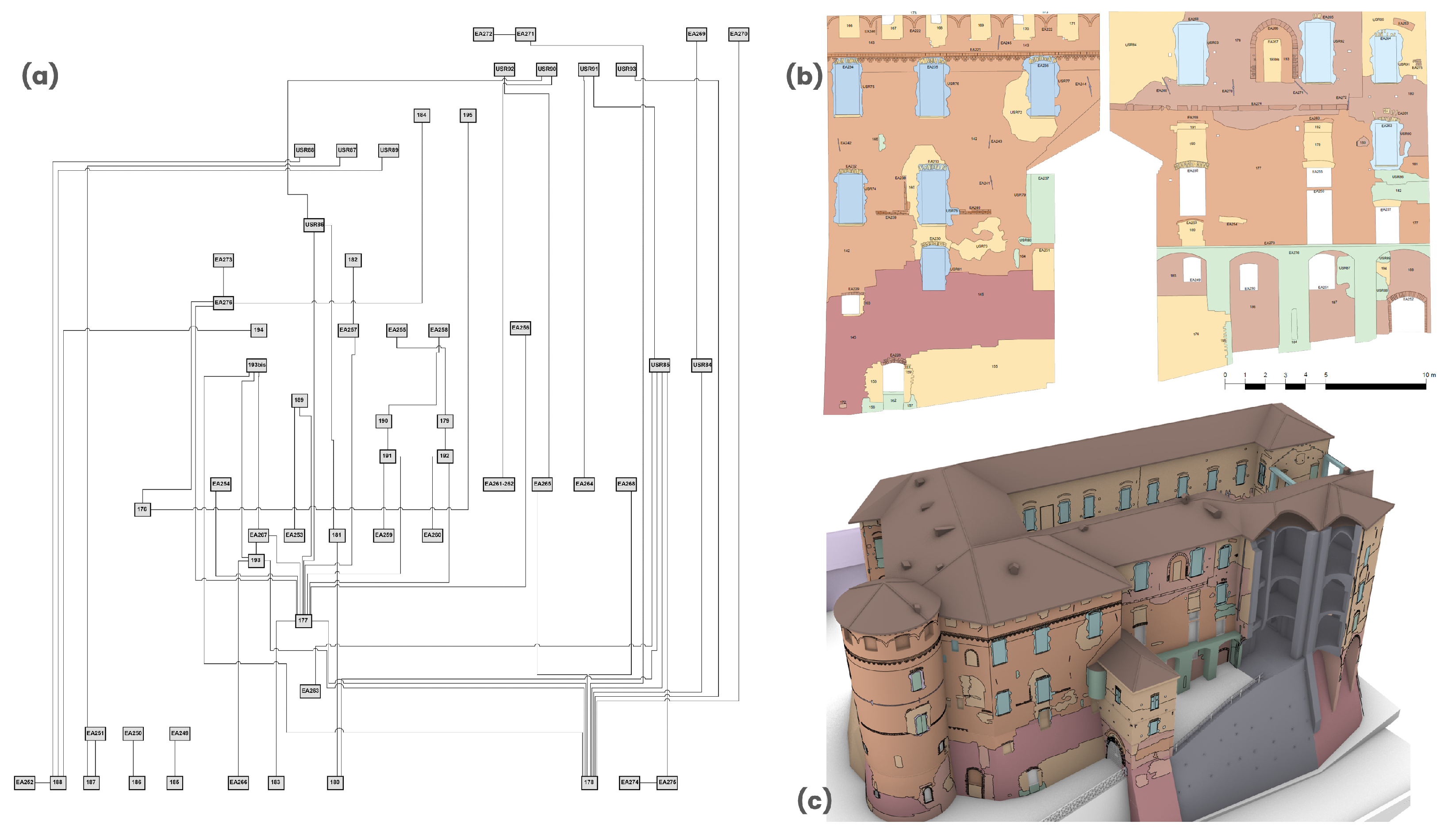
5. 3D Modeling
5.1. Parametric Design
5.2. NURBS Modeling
6. Discussion
7. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Teppati Losè, L.; Chiabrando, F.; Giulio Tonolo, F.; Lingua, A. UAV photogrammetry and VHR satellite imagery for emergency mapping. The October 2020 flood in Limone Piemonte (Italy). Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2021, XLIII-B3-2021, 727–734. [Google Scholar] [CrossRef]
- Shen, W.; Yang, Z.; Yang, C.; Li, X. A LiDAR SLAM-Assisted Fusion Positioning Method for USVs. Sensors 2023, 23, 1558. [Google Scholar] [CrossRef] [PubMed]
- Njimi, H.; Chehata, N.; Revers, F. Fusion of Dense Airborne LiDAR and Multispectral Sentinel-2 and Pleiades Satellite Imagery for Mapping Riparian Forest Species Biodiversity at Tree Level. Sensors 2024, 24, 1753. [Google Scholar] [CrossRef] [PubMed]
- Bordone, R. Andar per Castelli da Asti Tutt’intorno; Milvia: Torino, Italy, 1976; ISBN 2020010144721. [Google Scholar]
- Sorisio, R. Ricerche Storico-Giuridiche su Frinco. Master’s Thesis, University of Turin, Turin, Italy, 1979. [Google Scholar]
- Gabiani, N. Le Torri le Case-Forti ed i Palazzi Nobili Medievali in Asti; A. Forni: Bologna, Italy, 1978. [Google Scholar]
- Malfatto, V. Asti Antiche e Nobili Casate; Il Portichetto: Cuneo, Italy, 1982. [Google Scholar]
- Diara, F.; Roggero, M. The Frinco Castle: From an Integrated Survey to 3D Modelling and a Stratigraphic Analysis for Helping Knowledge and Reconstruction. Remote Sens. 2023, 15, 4874. [Google Scholar] [CrossRef]
- Trimble Website. Available online: https://www.trimble.com/en (accessed on 16 April 2024).
- DJI Website. Available online: https://www.dji.com (accessed on 16 April 2024).
- Diara, F.; Roggero, M. Quality Assessment of DJI Zenmuse L1 and P1 LiDAR and Photogrammetric Systems: Metric and Statistics Analysis with the Integration of Trimble SX10 Data. Geomatics 2022, 2, 254–281. [Google Scholar] [CrossRef]
- Štroner, M.; Urban, R.; Línková, L. A New Method for UAS Lidar Precision Testing Used for the Evaluation of an Affordable DJI Zenmuse L1 Scanner. Remote Sens. 2021, 13, 4811. [Google Scholar] [CrossRef]
- Kersten, T.; Wolf, J.; Lindstaedt, M. Investigations into the accuracy of the UAS system DJI Matrice 300 RTK with the sensors Zenmuse P1 and L1 in the Hamburg test field. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2022, XLIII-B1-2022, 339–346. [Google Scholar] [CrossRef]
- Teppati Losè, L.; Matrone, F.; Chiabrando, F.; Giulio Tonolo, F.; Lingua, A.; Maschio, P. New developments in lidar UAS surveys. Performance analyses and validation of the DJI Zenmuse L1. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2022, XLIII-B1-2022, 415–422. [Google Scholar] [CrossRef]
- Lachat, E.; Landes, T.; Grussenmeyer, P. Investigation of a Combined Surveying and Scanning Device: The Trimble SX10 Scanning Total Station. Sensors 2017, 17, 730. [Google Scholar] [CrossRef] [PubMed]
- CloudCompare Software. Available online: https://www.danielgm.net/cc/ (accessed on 16 April 2024).
- Soudarissanane, S.; Lindenbergh, R.; Menenti, M.; Teunissen, P. Incidence angle influence on the quality of terrestrial laser scanning points. In Proceedings of the ISPRS Workshop Laserscanning 2009, Paris, France, 1–2 September 2009. [Google Scholar]
- Kaasalainen, S.; Jaakkola, A.; Kaasalainen, M.; Krooks, A.; Kukko, A. Analysis of Incidence Angle and Distance Effects on Terrestrial Laser Scanner Intensity: Search for Correction Methods. Remote Sens. 2011, 3, 2207–2221. [Google Scholar] [CrossRef]
- Agisoft Metashape. Available online: https://www.agisoft.com (accessed on 16 April 2024).
- Rhinoceros. Available online: https://www.rhino3d.com (accessed on 20 February 2024).
- Ramalho de Oliveira, L.F.; Lassiter, H.A.; Wilkinson, B.; Whitley, T.; Ifju, P.; Logan, S.R.; Peter, G.F.; Vogel, J.G.; Martin, T.A. Moving to Automated Tree Inventory: Comparison of UAS-Derived Lidar and Photogrammetric Data with Manual Ground Estimates. Remote Sens. 2021, 13, 72. [Google Scholar] [CrossRef]
- Zhang, F.; Hassanzadeh, A.; Kikkert, J.; Pethybridge, S.J.; van Aardt, J. Comparison of UAS-Based Structure-from-Motion and LiDAR for Structural Characterization of Short Broadacre Crops. Remote Sens. 2021, 13, 3975. [Google Scholar] [CrossRef]
- Mugnai, F.; Masiero, A. Integrating UAS Photogrammetry and Digital Image Correlation for High-Resolution Monitoring of Large Landslides. Preprints 2022, 2022010248. [Google Scholar] [CrossRef]
- Gaspari, F.; Ioli, F.; Barbieri, F.; Belcore, E.; Pinto, L. Integration of UAS-LiDAR and UAS-photogrammetry for infrastructure monitoring and bridge assessment. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2022, XLIII-B2-2022, 995–1002. [Google Scholar] [CrossRef]
- Stanga, C.; Banfi, F.; Roascio, S. Enhancing Building Archaeology: Drawing, UAV Photogrammetry and Scan-to-BIM-to-VR Process of Ancient Roman Ruins. Drones 2023, 7, 521. [Google Scholar] [CrossRef]
- Banfi, F.; Oreni, D.; Bonini, A.J. The Arch of Peace of Milan and its historic memory: From 3D survey and HBIM to mixed reality (VR-AR). In Connecting. Drawing for Weaving Relationships, Proceedings of the 42th International Conference of Representation Disciplines Teachers, Reggio Calabria, Italy, 16–18 September 2021; FrancoAngeli: Milan, Italy, 2020; pp. 1660–1677. [Google Scholar] [CrossRef]
- Diara, F. HBIM Open Source: A Review. ISPRS Int. J. Geo-Inf. 2022, 11, 472. [Google Scholar] [CrossRef]
- Banfi, F.; Roascio, S.; Mandelli, A.; Stanga, C. Narrating Ancient Roman Heritage through Drawings and Digital Architectural Representation: From Historical Archives, UAV and LIDAR to Virtual-Visual Storytelling and HBIM Projects. Drones 2023, 7, 51. [Google Scholar] [CrossRef]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| CP Number | Mean | Max | ||||
|---|---|---|---|---|---|---|
| σhor | σvert | σhor | σvert | |||
| Outdoor | 15 | 0.005 | 0.002 | 0.009 | 0.003 | |
| Indoor | Basement | 110 | 0.011 | 0.003 | 0.095 | 0.008 |
| Level 1 | 52 | 0.008 | 0.003 | 0.022 | 0.008 | |
| Level 2 | 45 | 0.007 | 0.003 | 0.022 | 0.009 | |
| Garret | 45 | 0.015 | 0.002 | 0.044 | 0.004 | |
| CP Number | Mean | Max | ||||
|---|---|---|---|---|---|---|
| σhor | σvert | σhor | σvert | |||
| Outdoor | 15 | 0.005 | 0.002 | 0.009 | 0.003 | |
| Indoor | Basement | 98 | 0.008 | 0.003 | 0.022 | 0.008 |
| Level 1 | 52 | 0.008 | 0.003 | 0.022 | 0.008 | |
| Level 2 | 45 | 0.007 | 0.003 | 0.022 | 0.009 | |
| Garret | 32 | 0.010 | 0.002 | 0.030 | 0.004 | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Roggero, M.; Diara, F. Multi-Sensor 3D Survey: Aerial and Terrestrial Data Fusion and 3D Modeling Applied to a Complex Historic Architecture at Risk. Drones 2024, 8, 162. https://doi.org/10.3390/drones8040162
Roggero M, Diara F. Multi-Sensor 3D Survey: Aerial and Terrestrial Data Fusion and 3D Modeling Applied to a Complex Historic Architecture at Risk. Drones. 2024; 8(4):162. https://doi.org/10.3390/drones8040162
Chicago/Turabian StyleRoggero, Marco, and Filippo Diara. 2024. "Multi-Sensor 3D Survey: Aerial and Terrestrial Data Fusion and 3D Modeling Applied to a Complex Historic Architecture at Risk" Drones 8, no. 4: 162. https://doi.org/10.3390/drones8040162
APA StyleRoggero, M., & Diara, F. (2024). Multi-Sensor 3D Survey: Aerial and Terrestrial Data Fusion and 3D Modeling Applied to a Complex Historic Architecture at Risk. Drones, 8(4), 162. https://doi.org/10.3390/drones8040162