
Generalized Labeled Multi-Bernoulli Filter-Based Passive Localization and Tracking of Radiation Sources Carried by Unmanned Aerial Vehicles


Abstract
1. Introduction
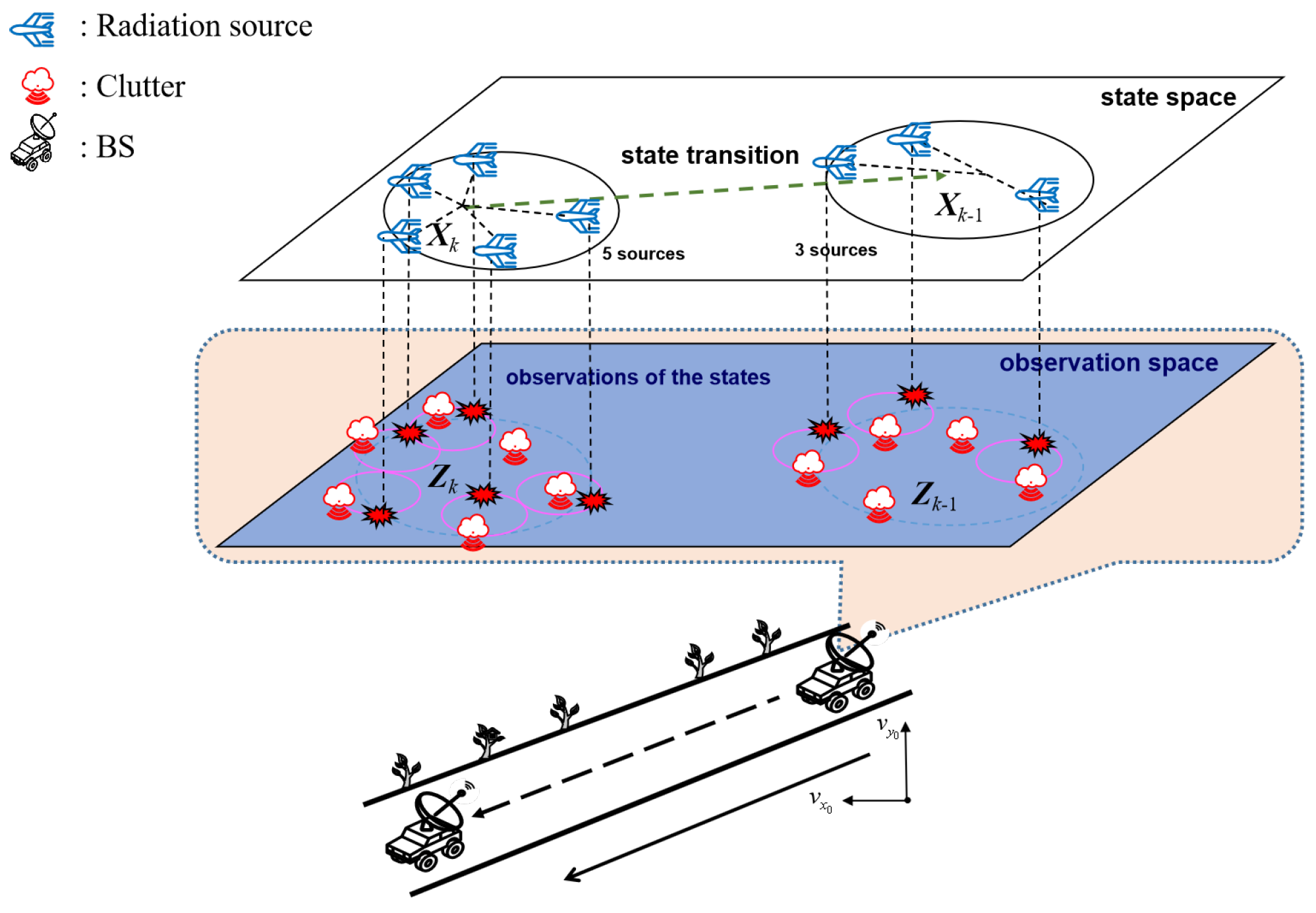
- For the complex electromagnetic environment, we model the “scenario with obstacles between the target and the receiver” as an RFS, in which both the state and the number of targets received by the receiver of the base station change during the observation time.
- The non-stationary wireless signal propagation environment is usually affected by weather, terrain, other wireless devices, etc. Therefore, we model external factors such as weather and terrain (which may impact the information received by the receiver) as a clutter RFS and identify that each clutter generates a false alarm (a false measurement). Our proposed filter is capable of accurately tracking targets of interest from clutter interference and capturing their trajectory onset remarkably well.
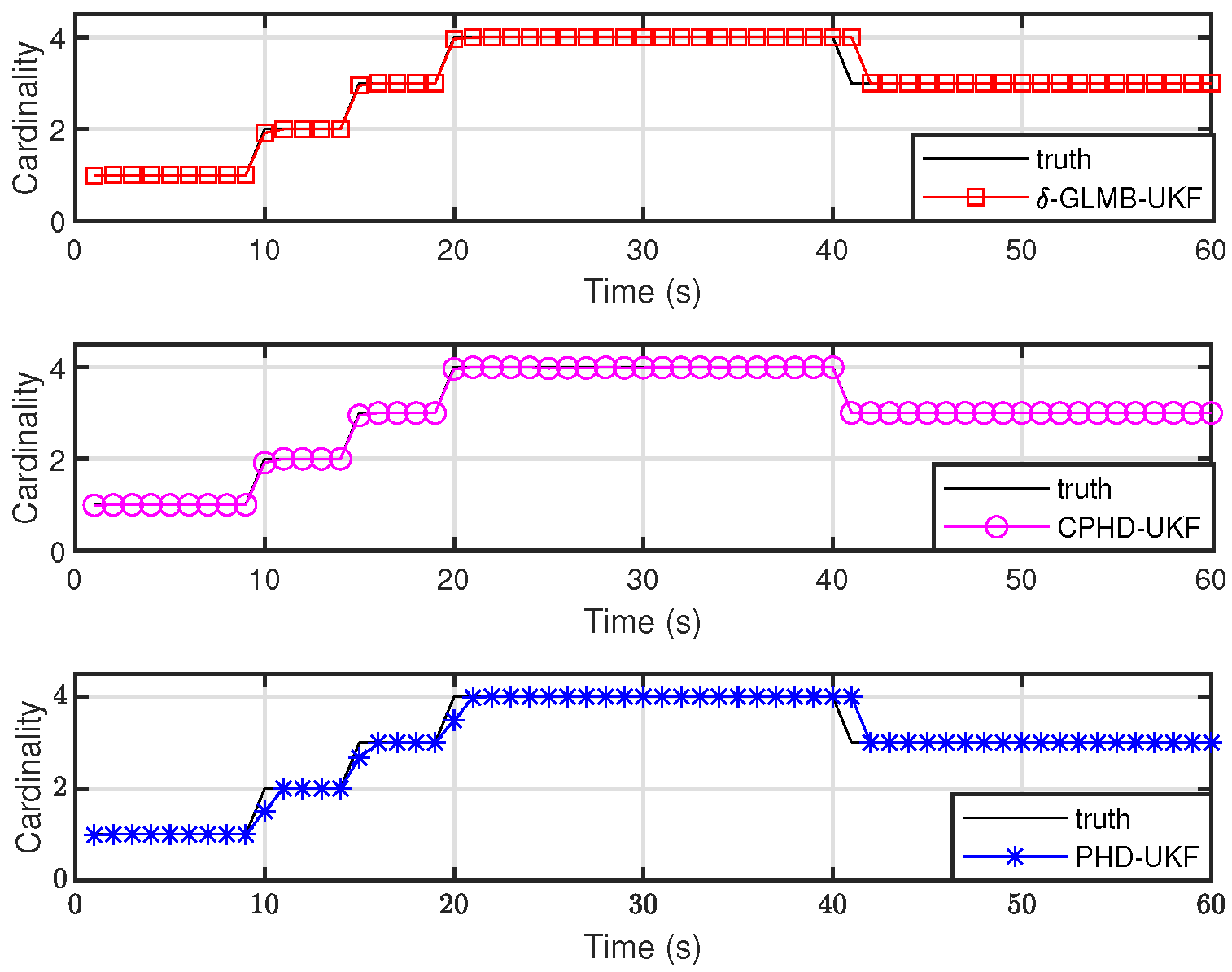
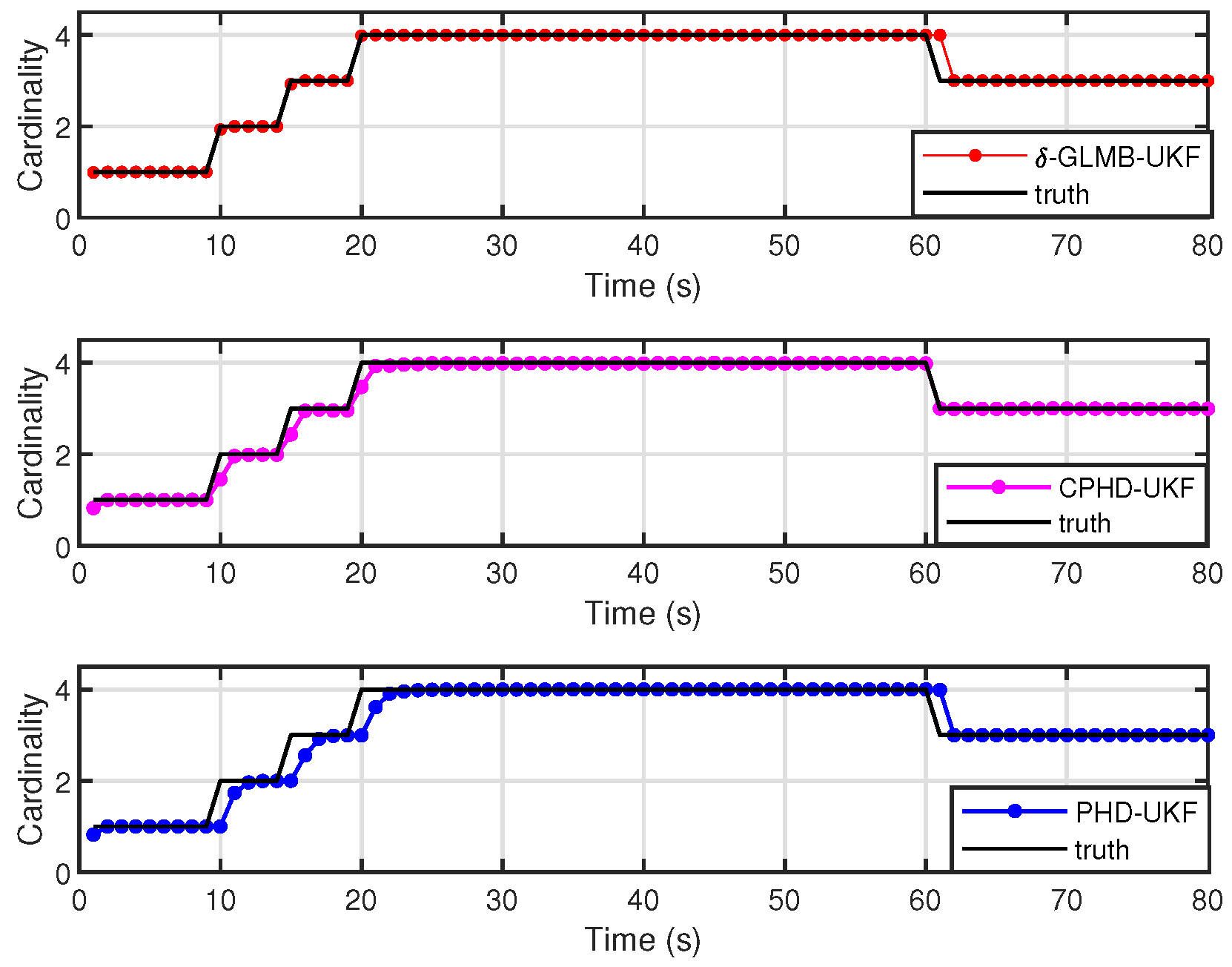
- We describe the extended Kalman filter (EKF) and unscented Kalman filter (UKF) implementations of the -GLMB filter, which are able to accurately capture the target’s motion state. Moreover, we extend the PHD and CPHD filters to the scenarios of interest in this paper for comparison with the proposed method. Simulation tests verify the effectiveness of the -GLMB filter for target number identification and state tracking.
2. Background
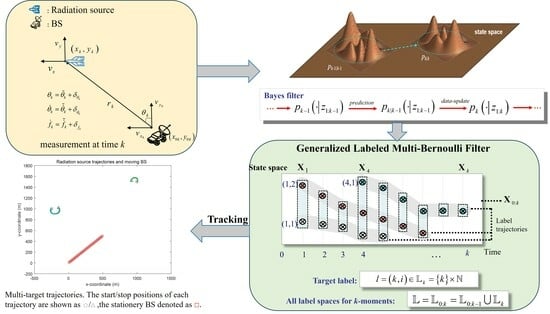
2.1. Dynamic Physics Model
2.2. Measurement Model
2.3. Multi-Target RFS System Model
2.4. -GLMB FILTER
- is a collection of predicted trajectory labels within the set . Each tuple is a prediction hypothesis with probability . represents the historical association mapping.
- represents the weight associated with the newborn trajectory labels, where and denote the labeled space for newborn sources. is the probability density function (PDF) for the newborn source with label l. is the weight of the survival label set.
- is the prediction PDF, and is the update PDF. denotes the transition kinematic density, and represents the survival probability.
3. Nonlinear -GLMB Filter for Passive Localization and Tracking
3.1. -GLMB Prediction for Nonlinear Gaussian Model
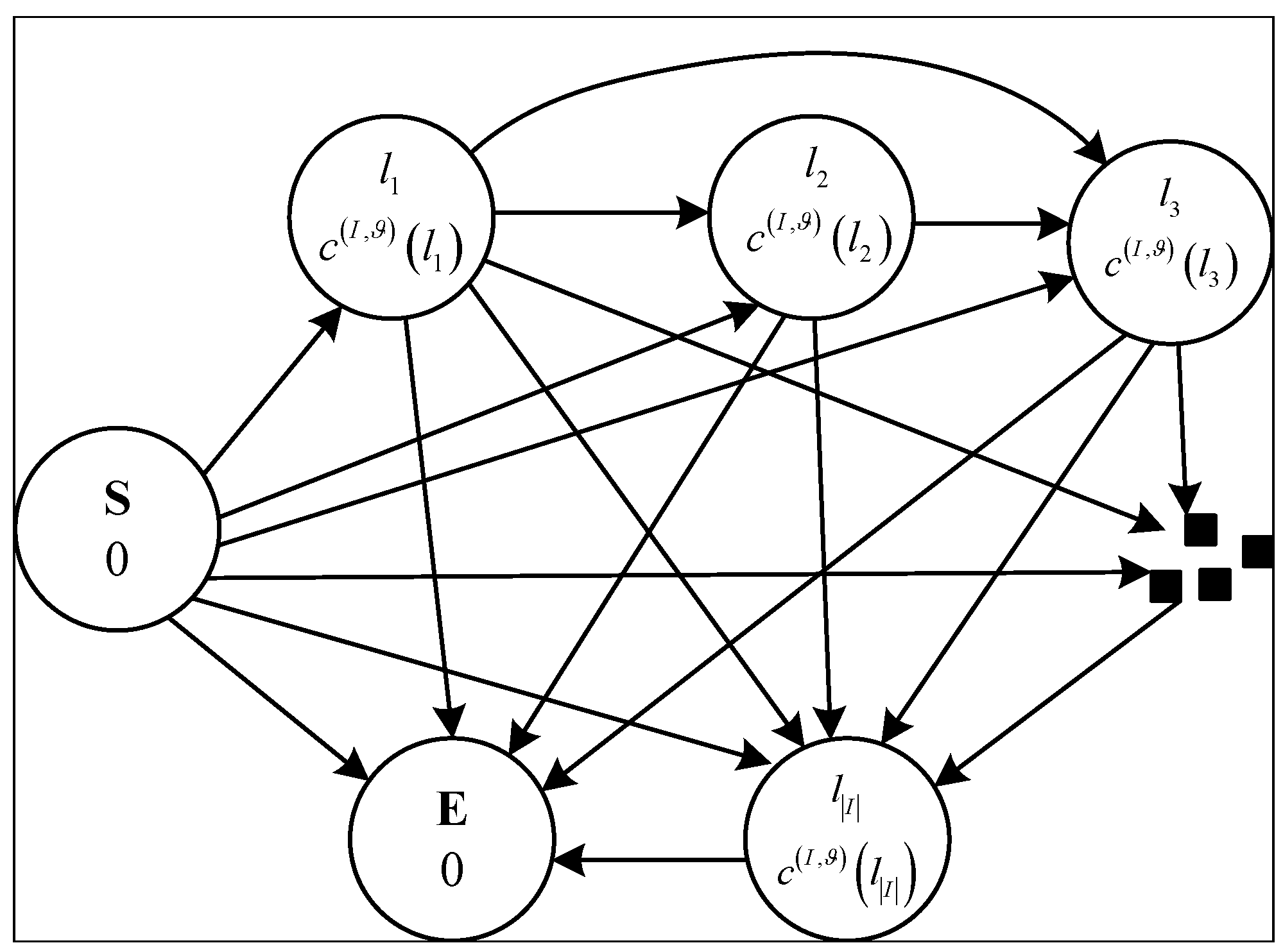
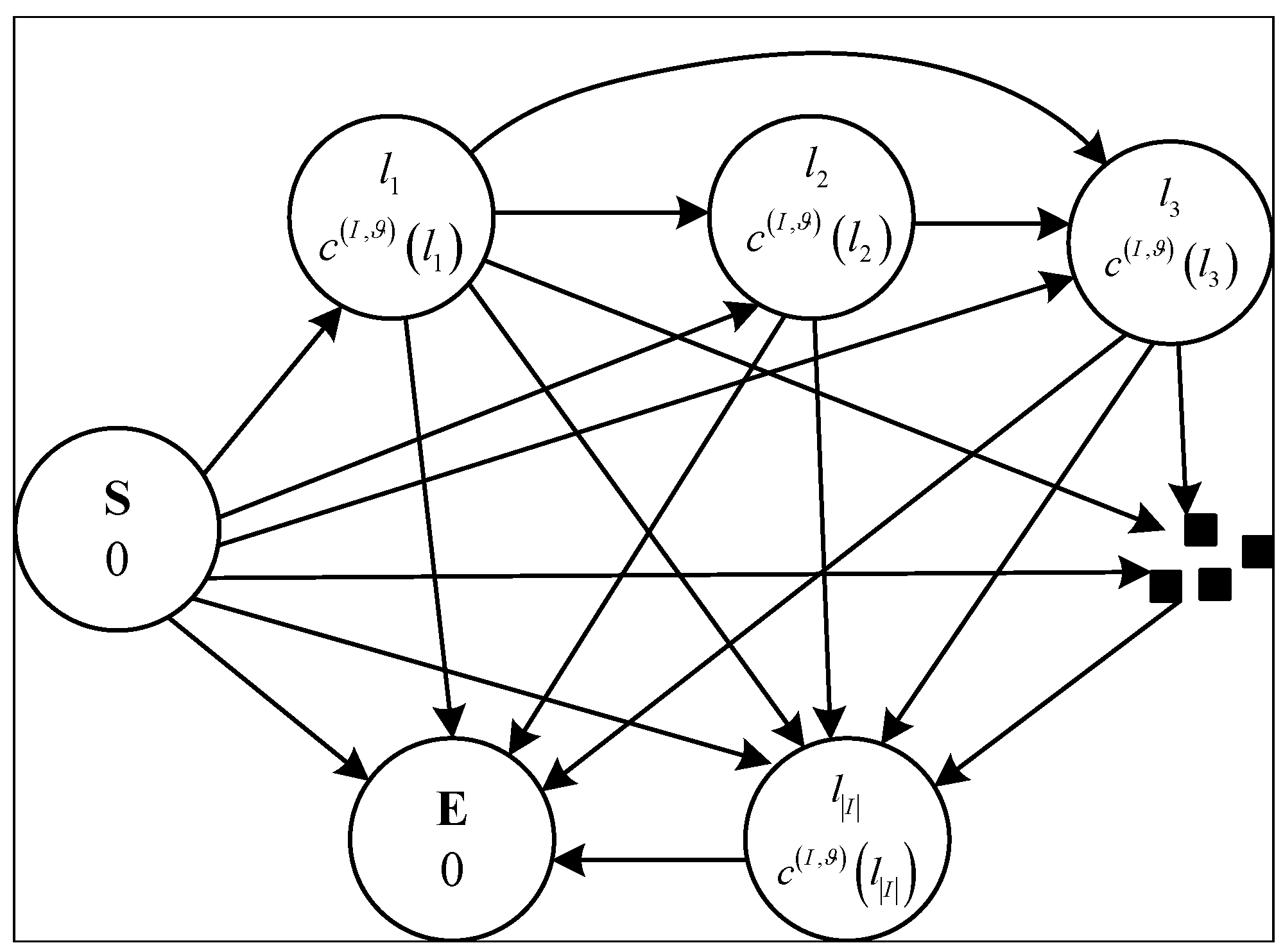
3.1.1. K-Shortest Path Algorithm
3.1.2. Computing the Predicted Parameter Sets (EKF Implementation)
3.1.3. Computing the Predicted Parameter Sets (UKF Implementation)
3.1.4. Pruning the Predicted Density
3.2. -GLMB Update for Nonlinear Gaussian Model
3.2.1. Ranked Assignment Algorithm
3.2.2. Calculating the Updated Parameter Sets (EKF Implementation)
3.2.3. Calculating the Updated Parameter Sets (UKF Implementation)
3.2.4. Pruning the Updated Density
4. Numerical Example
- UKF implementation for the PHD filter;
- UKF implementation for the CPHD filter.
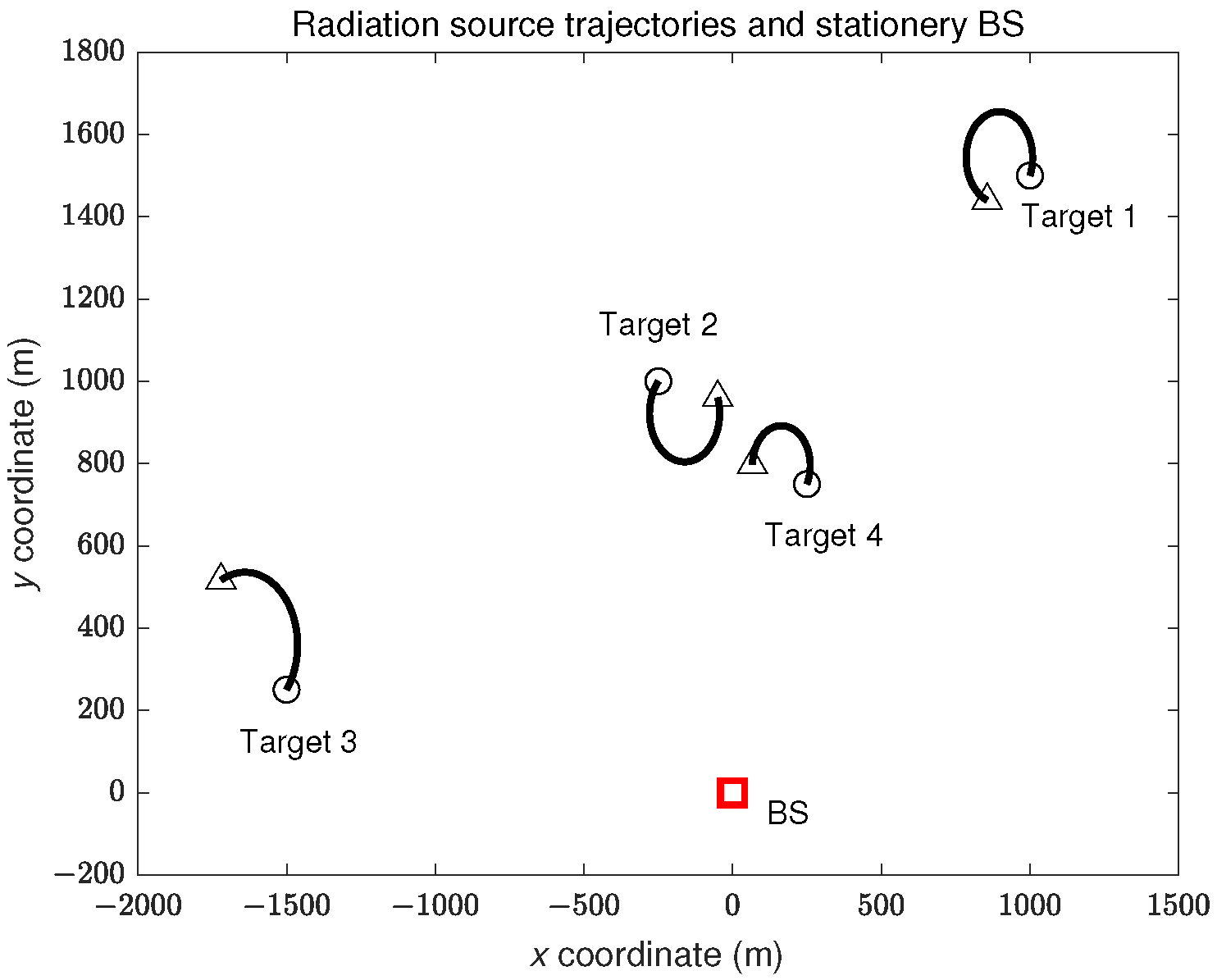
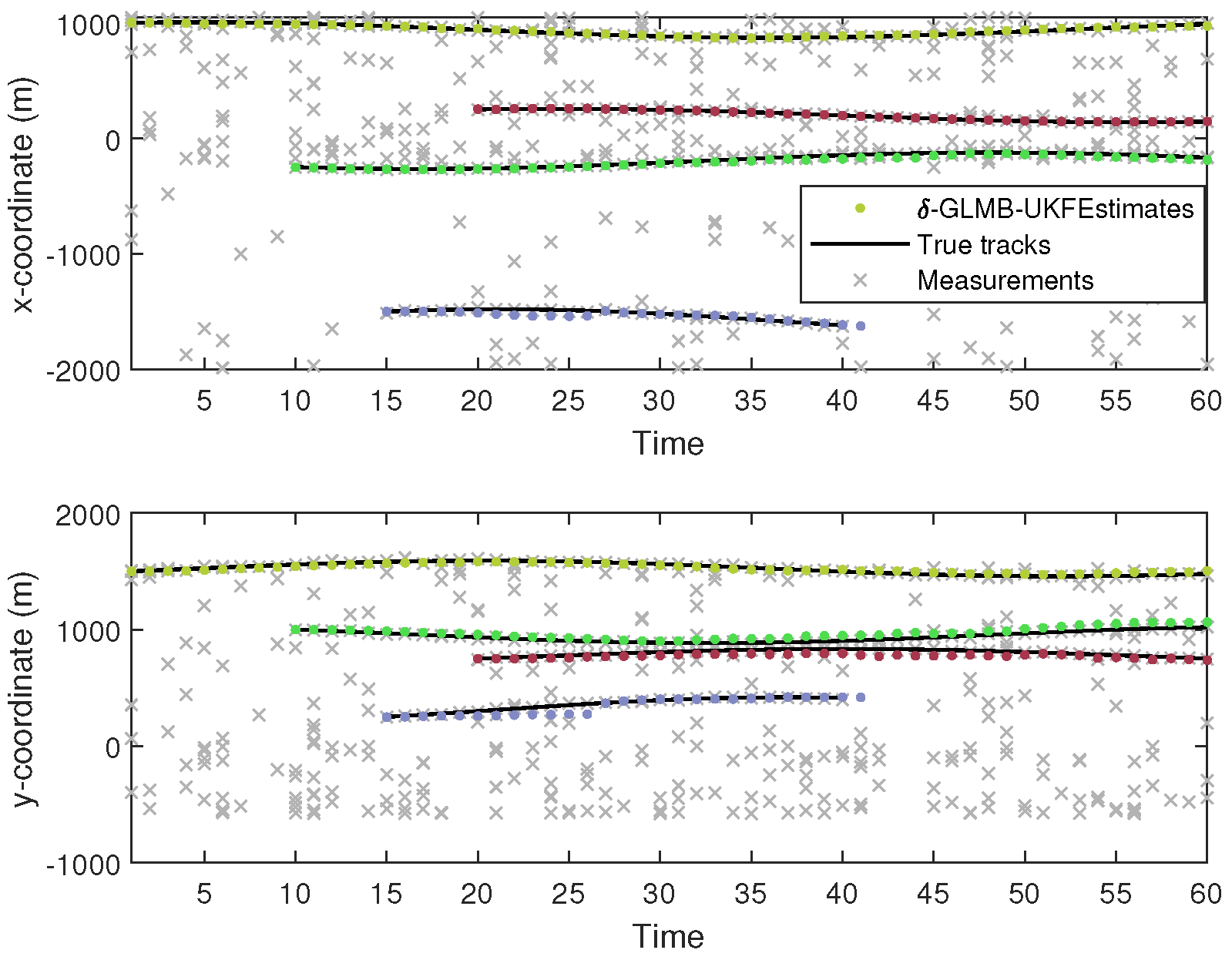
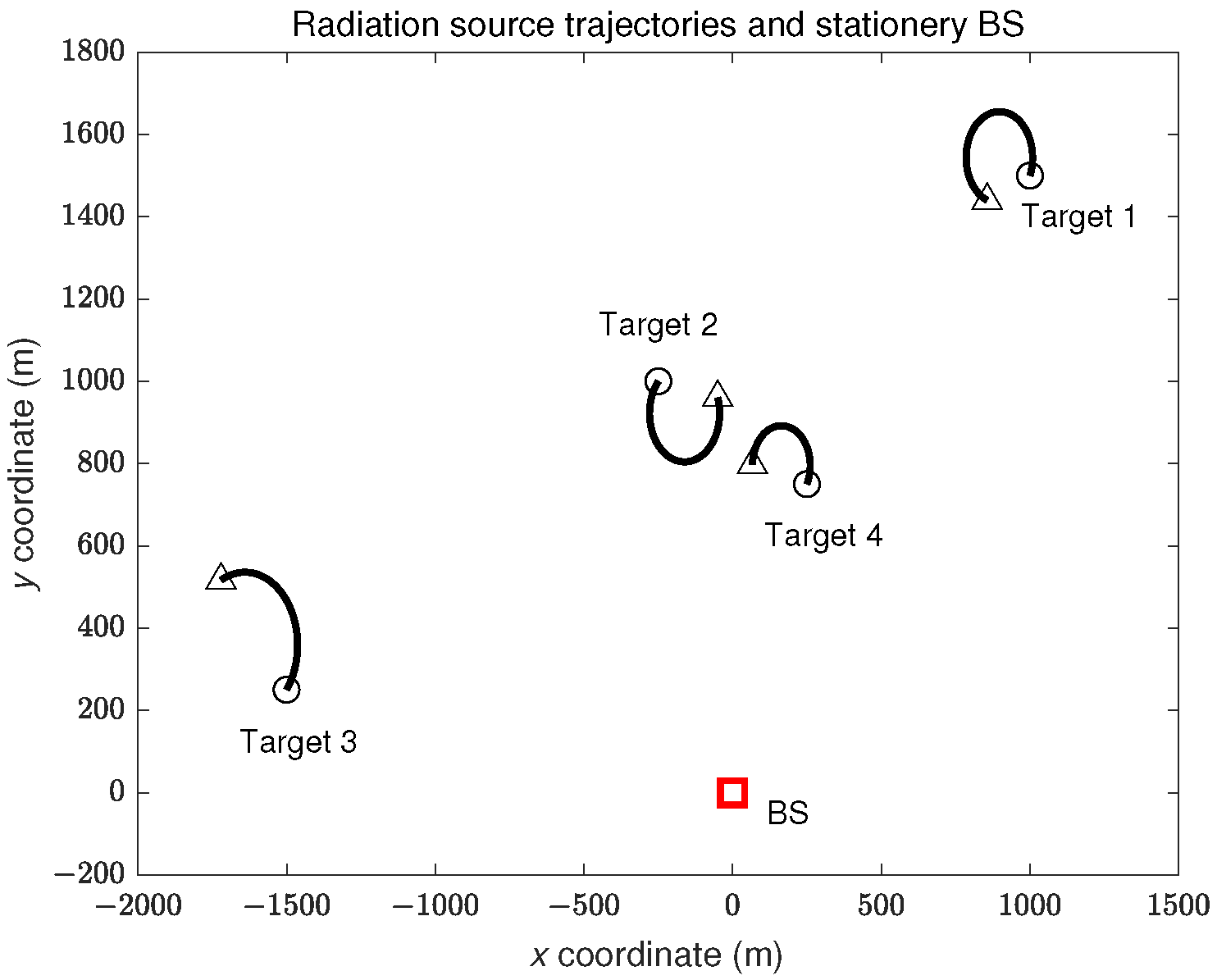
4.1. A Stationary BS for Passive Localization and Tracking
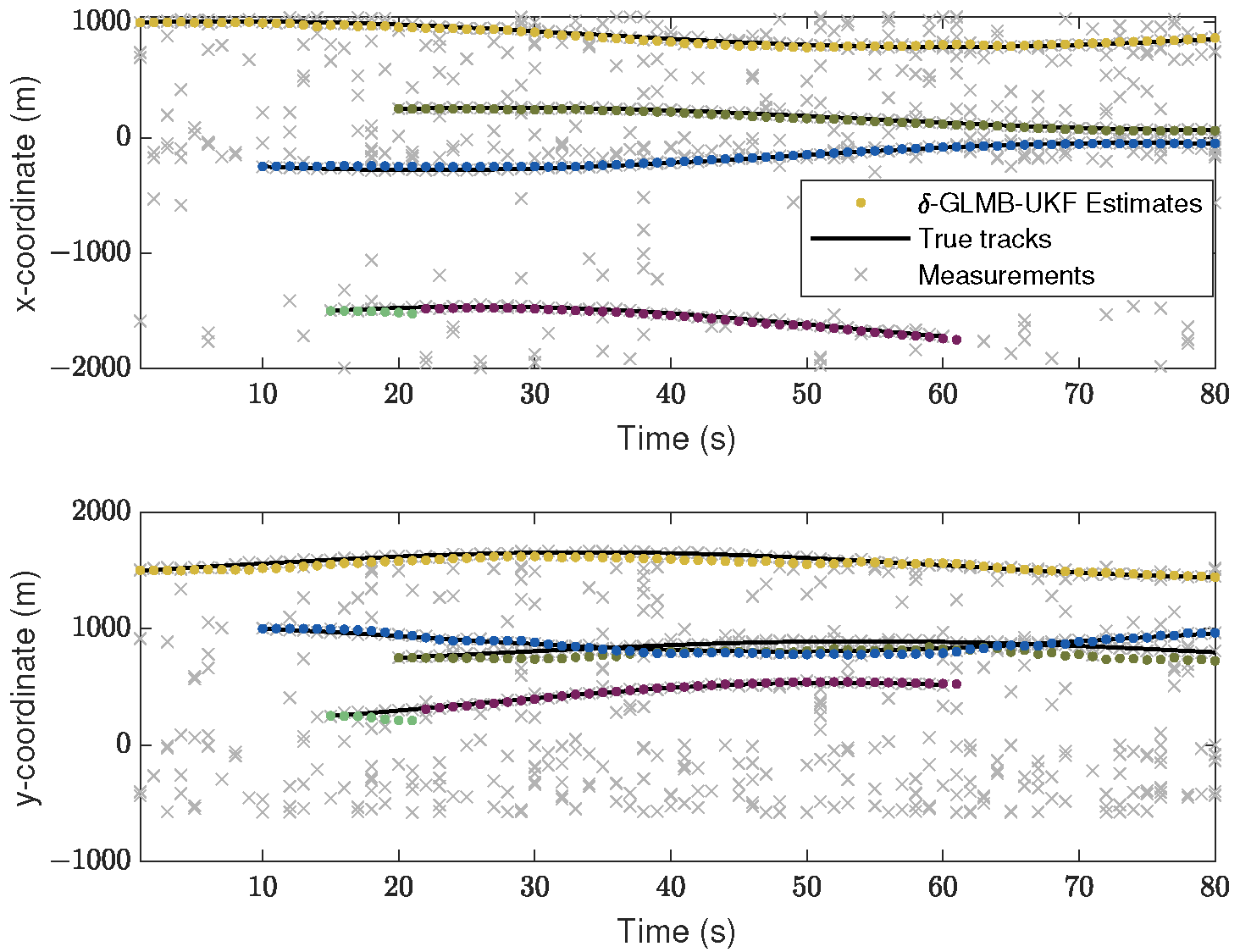
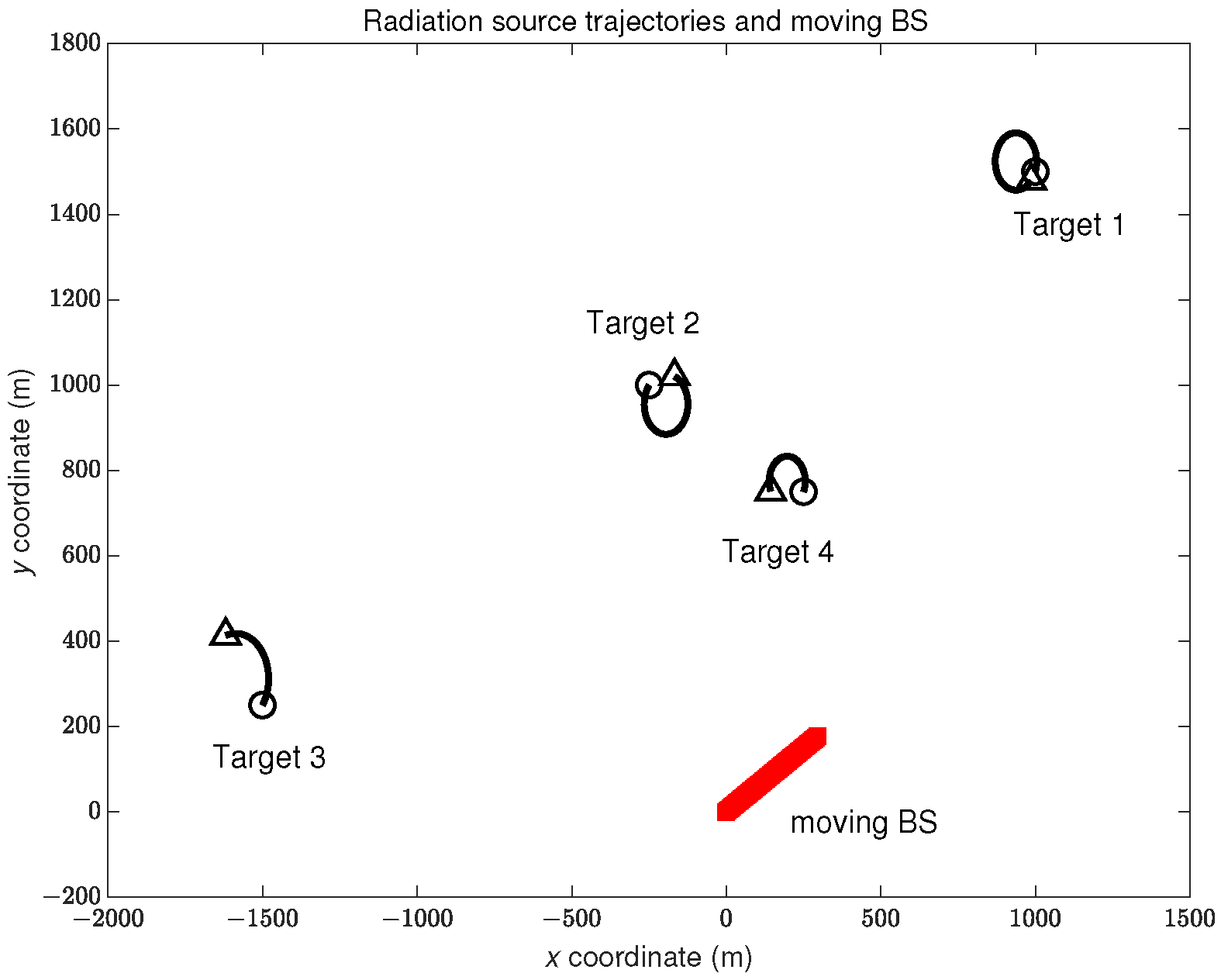
4.2. A Moving BS for Passive Localization and Tracking
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| Symbol | Implication |
| Transpose of a matrix | |
| Diagonal operation | |
| Trace of a matrix | |
| x and | Single-target state |
| X and | Multi-target states |
| , , , and | Labeled state spaces |
| and | State spaces without labels |
| Finite subsets of space | |
| and | Definition or equivalences |
| The number of elements in set X | |
| The -th element of the matrix | |
| Inner product | |
| Multi-target exponential | |
| Gaussian distribution with mean and variance | |
| Kronecker delta function [29] | |
| Generalized indicator function [29] | |
| Distinct label indicator [29] | |
| Dimensionality of target state | |
| Dimensionality of measurement |
Appendix A
Appendix B
Appendix B.1. Bernoulli RFS
Appendix B.2. Multi-Bernoulli RFS
Appendix B.3. Labeled RFS
Appendix B.4. δ-GLMB RFS
References
- Kang, X.; Shao, Y.; Bai, G.; Sun, H.; Zhang, T.; Wang, D. Dual-UAV Collaborative High-Precision Passive Localization Method Based on Optoelectronic Platform. Drones 2023, 7, 646. [Google Scholar] [CrossRef]
- Torrieri, D.J. Statistical theory of passive location systems. IEEE Trans. Aerosp. Electron. Syst. 1984, 2, 183–198. [Google Scholar] [CrossRef]
- Wang, J.; Du, H.; Niyato, D.; Zhou, M.; Kang, J.; Xiong, Z.; Jamalipour, A. Through the Wall Detection and Localization of Autonomous Mobile Device in Indoor Scenario. IEEE J. Sel. Areas Commun. 2024, 42, 161–176. [Google Scholar] [CrossRef]
- Xiang, F.; Wang, J.; Yuan, X. Research on passive detection and location by fixed single observer. In Proceedings of the 2020 International Conference on Information Science, Parallel and Distributed Systems (ISPDS), Xi’an, China, 14–16 August 2020; pp. 35–39. [Google Scholar]
- Shen, J.; Molisch, A.F.; Salmi, J. Accurate passive location estimation using TOA measurements. IEEE Trans. Wirel. Commun. 2012, 11, 2182–2192. [Google Scholar] [CrossRef]
- Weiss, A.J. On the accuracy of a cellular location system based on RSS measurements. IEEE Trans. Veh. Technol. 2003, 52, 1508–1518. [Google Scholar] [CrossRef]
- Guvenc, I.; Chong, C.C. A survey on TOA based wireless localization and NLOS mitigation techniques. IEEE Commun. Surv. Tutor. 2009, 11, 107–124. [Google Scholar] [CrossRef]
- Chen, R.; Long, W.X.; Wang, X.; Jiandong, L. Multi-Mode OAM Radio Waves: Generation, Angle of Arrival Estimation and Reception With UCAs. IEEE Trans. Wirel. Commun. 2020, 19, 6932–6947. [Google Scholar] [CrossRef]
- Zhang, W.; Zhu, X.; Zhao, Z.; Liu, Y.; Yang, S. High accuracy positioning system based on multistation UWB time-of-flight measurements. In Proceedings of the 2020 IEEE International Conference on Computational Electromagnetics (ICCEM), IEEE, Singaproe, 24–26 August 2020; pp. 268–270. [Google Scholar]
- Garraffa, G.; Sferlazza, A.; D’Ippolito, F.; Alonge, F. Localization Based on parallel robots Kinematics As an Alternative to Trilateration. IEEE Trans. Ind. Electron. 2021, 69, 999–1010. [Google Scholar] [CrossRef]
- Mahler, R.P. Statistical Multisource-Multitarget Information Fusion; Artech House: Norwood, MA, USA, 2007; Volume 685. [Google Scholar]
- Jeong, T.T. Particle PHD filter multiple target tracking in sonar image. IEEE Trans. Aerosp. Electron. Syst. 2007, 43, 409–416. [Google Scholar] [CrossRef]
- Pham, N.T.; Huang, W.; Ong, S.H. Tracking multiple objects using probability hypothesis density filter and color measurements. In Proceedings of the 2007 IEEE International Conference on Multimedia and Expo, Beijing, China, 2–5 July 2007; pp. 1511–1514. [Google Scholar]
- Hoseinnezhad, R.; Vo, B.N.; Vo, B.T. Visual tracking in background subtracted image sequences via multi-Bernoulli filtering. IEEE Trans. Signal Process. 2012, 61, 392–397. [Google Scholar] [CrossRef]
- Canaud, M.; Mihaylova, L.; Sau, J.; El Faouzi, N.E. Probabilty hypothesis density filtering for real-time traffic state estimation and prediction. Netw. Heterog. Media (NHM) 2013, 8, 825–842. [Google Scholar] [CrossRef]
- Zhang, X. Adaptive control and reconfiguration of mobile wireless sensor networks for dynamic multi-target tracking. IEEE Trans. Autom. Control. 2011, 56, 2429–2444. [Google Scholar] [CrossRef]
- Battistelli, G.; Chisci, L.; Fantacci, C.; Farina, A.; Graziano, A. Consensus CPHD filter for distributed multitarget tracking. IEEE J. Sel. Top. Signal Process. 2013, 7, 508–520. [Google Scholar] [CrossRef]
- Ueney, M.; Clark, D.E.; Julier, S.J. Distributed fusion of PHD filters via exponential mixture densities. IEEE J. Sel. Top. Signal Process. 2013, 7, 521–531. [Google Scholar] [CrossRef]
- Mahler, R.P. Multitarget Bayes filtering via first-order multitarget moments. IEEE Trans. Aerosp. Electron. Syst. 2003, 39, 1152–1178. [Google Scholar] [CrossRef]
- Lindenmaier, L.; Aradi, S.; Bécsi, T.; Törő, O.; Gáspár, P. GM-PHD Filter Based Sensor Data Fusion for Automotive Frontal Perception System. IEEE Trans. Veh. Technol. 2022, 71, 7215–7229. [Google Scholar] [CrossRef]
- Tian, Y.; Liu, M.; Zhang, S.; Zheng, R.; Dong, S.; Liu, Z. Underwater Target Tracking Based on the Feature-Aided GM-PHD Method. IEEE Trans. Instrum. Meas. 2024, 73, 5500412. [Google Scholar] [CrossRef]
- Mahler, R. PHD filters of higher order in target number. IEEE Trans. Aerosp. Electron. Syst. 2007, 43, 1523–1543. [Google Scholar] [CrossRef]
- Wei, S.; Zhang, B.; Yi, W. Trajectory PHD and CPHD Filters With Unknown Detection Profile. IEEE Trans. Veh. Technol. 2022, 71, 8042–8058. [Google Scholar] [CrossRef]
- Vo, B.T.; Vo, B.N.; Cantoni, A. The cardinality balanced multi-target multi-Bernoulli filter and its implementations. IEEE Trans. Signal Process. 2008, 57, 409–423. [Google Scholar]
- Davies, E.S.; García-Fernández, A.F. Information Exchange Track-Before-Detect Multi-Bernoulli Filter for Superpositional Sensors. IEEE Trans. Signal Process. 2024, 72, 607–621. [Google Scholar] [CrossRef]
- Vo, B.T.; Vo, B.N. Labeled Random Finite Sets and Multi-Object Conjugate Priors. IEEE Trans. Signal Process. 2013, 61, 3460–3475. [Google Scholar] [CrossRef]
- Wu, W.; Sun, H.; Cai, Y.; Jiang, S.; Xiong, J. Tracking Multiple Maneuvering Targets Hidden in the DBZ Based on the MM-GLMB Filter. IEEE Trans. Signal Process. 2020, 68, 2912–2924. [Google Scholar] [CrossRef]
- Wu, W.; Sun, H.; Cai, Y.; Xiong, J. MM-GLMB Filter-Based Sensor Control for Tracking Multiple Maneuvering Targets Hidden in the Doppler Blind Zone. IEEE Trans. Signal Process. 2020, 68, 4555–4567. [Google Scholar] [CrossRef]
- Vo, B.N.; Vo, B.T.; Phung, D. Labeled Random Finite Sets and the Bayes Multi-Target Tracking Filter. IEEE Trans. Signal Process. 2014, 62, 6554–6567. [Google Scholar] [CrossRef]
- Liu, Z.; Gan, J.; Li, J.; Wu, M. Adaptive δ-Generalized Labeled Multi-Bernoulli Filter for Multi-Object Detection and Tracking. IEEE Access 2021, 9, 2100–2109. [Google Scholar] [CrossRef]
- Shim, C.; Vo, B.T.; Vo, B.N.; Ong, J.; Moratuwage, D. Linear Complexity Gibbs Sampling for Generalized Labeled Multi-Bernoulli Filtering. IEEE Trans. Signal Process. 2023, 71, 1981–1994. [Google Scholar] [CrossRef]
- Vo, B.N.; Vo, B.T.; Beard, M. Multi-Sensor Multi-Object Tracking With the Generalized Labeled Multi-Bernoulli Filter. IEEE Trans. Signal Process. 2019, 67, 5952–5967. [Google Scholar] [CrossRef]
- Vo, B.N.; Vo, B.T. A Multi-Scan Labeled Random Finite Set Model for Multi-Object State Estimation. IEEE Trans. Signal Process. 2019, 67, 4948–4963. [Google Scholar] [CrossRef]
- Nguyen, T.T.D.; Vo, B.N.; Vo, B.T.; Kim, D.Y.; Choi, Y.S. Tracking Cells and Their Lineages Via Labeled Random Finite Sets. IEEE Trans. Signal Process. 2021, 69, 5611–5626. [Google Scholar] [CrossRef]
- Van Nguyen, H.; Rezatofighi, H.; Vo, B.N.; Ranasinghe, D.C. Distributed multi-object tracking under limited field of view sensors. IEEE Trans. Signal Process. 2021, 69, 5329–5344. [Google Scholar] [CrossRef]
- Dong, X.; Zhao, J.; Sun, M.; Zhang, X.; Wang, Y. A Modified δ-Generalized Labeled Multi-Bernoulli Filtering for Multi-Source DOA Tracking with Coprime Array. IEEE Trans. Wirel. Commun. 2023, 22, 9424–9437. [Google Scholar] [CrossRef]
- Kuhn, H.W. The Hungarian method for the assignment problem. Nav. Res. Logist. Q. 1955, 2, 83–97. [Google Scholar] [CrossRef]
- Murty, K.G. An algorithm for ranking all the assignments in order of increasing cost. Oper. Res. 1968, 16, 682–687. [Google Scholar] [CrossRef]
- Schuhmacher, D.; Vo, B.T.; Vo, B.N. A Consistent Metric for Performance Evaluation of Multi-Object Filters. IEEE Trans. Signal Process. 2008, 56, 3447–3457. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Source | Survival Time | Initial State () |
|---|---|---|
| 1 | 1–80 s | |
| 2 | 10–80 s | |
| 3 | 15–60 s | |
| 4 | 20–80 s |
| Source | Survival Time | Initial State () |
|---|---|---|
| 1 | 1–60 s | |
| 2 | 10–60 s | |
| 3 | 15–40 s | |
| 4 | 20–60 s |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhao, J.; Gui, R.; Dong, X. Generalized Labeled Multi-Bernoulli Filter-Based Passive Localization and Tracking of Radiation Sources Carried by Unmanned Aerial Vehicles. Drones 2024, 8, 96. https://doi.org/10.3390/drones8030096
Zhao J, Gui R, Dong X. Generalized Labeled Multi-Bernoulli Filter-Based Passive Localization and Tracking of Radiation Sources Carried by Unmanned Aerial Vehicles. Drones. 2024; 8(3):96. https://doi.org/10.3390/drones8030096
Chicago/Turabian StyleZhao, Jun, Renzhou Gui, and Xudong Dong. 2024. "Generalized Labeled Multi-Bernoulli Filter-Based Passive Localization and Tracking of Radiation Sources Carried by Unmanned Aerial Vehicles" Drones 8, no. 3: 96. https://doi.org/10.3390/drones8030096
APA StyleZhao, J., Gui, R., & Dong, X. (2024). Generalized Labeled Multi-Bernoulli Filter-Based Passive Localization and Tracking of Radiation Sources Carried by Unmanned Aerial Vehicles. Drones, 8(3), 96. https://doi.org/10.3390/drones8030096