1. Introduction
Agricultural production environments can be complex, with significant differences in planting and management practices. The growth of crop plants in the middle and late stages of growth often limits the application of ground machinery [
1,
2]. Unmanned aerial vehicles (UAVs) exhibit high working efficiency, fewer constraints by the ground environment, and the ability to operate regardless of changes in the working environment or crop growth stages. Furthermore, the difficulties faced in accessing fields during the middle and late growth stages of crops can be resolved using UAV. Therefore, UAVs are becoming important agricultural working tools [
3,
4,
5]. In recent years, UAV-based techniques have been widely used for remote sensing [
6], pesticide spraying [
7,
8], seed sowing [
9,
10,
11], and fertilization spreading [
12,
13]. Companies like DJI and XAIRCRAFT in China have successively launched various models of UAV spreaders, which demonstrates the effectiveness of UAV spreading operations in actual applications [
14].
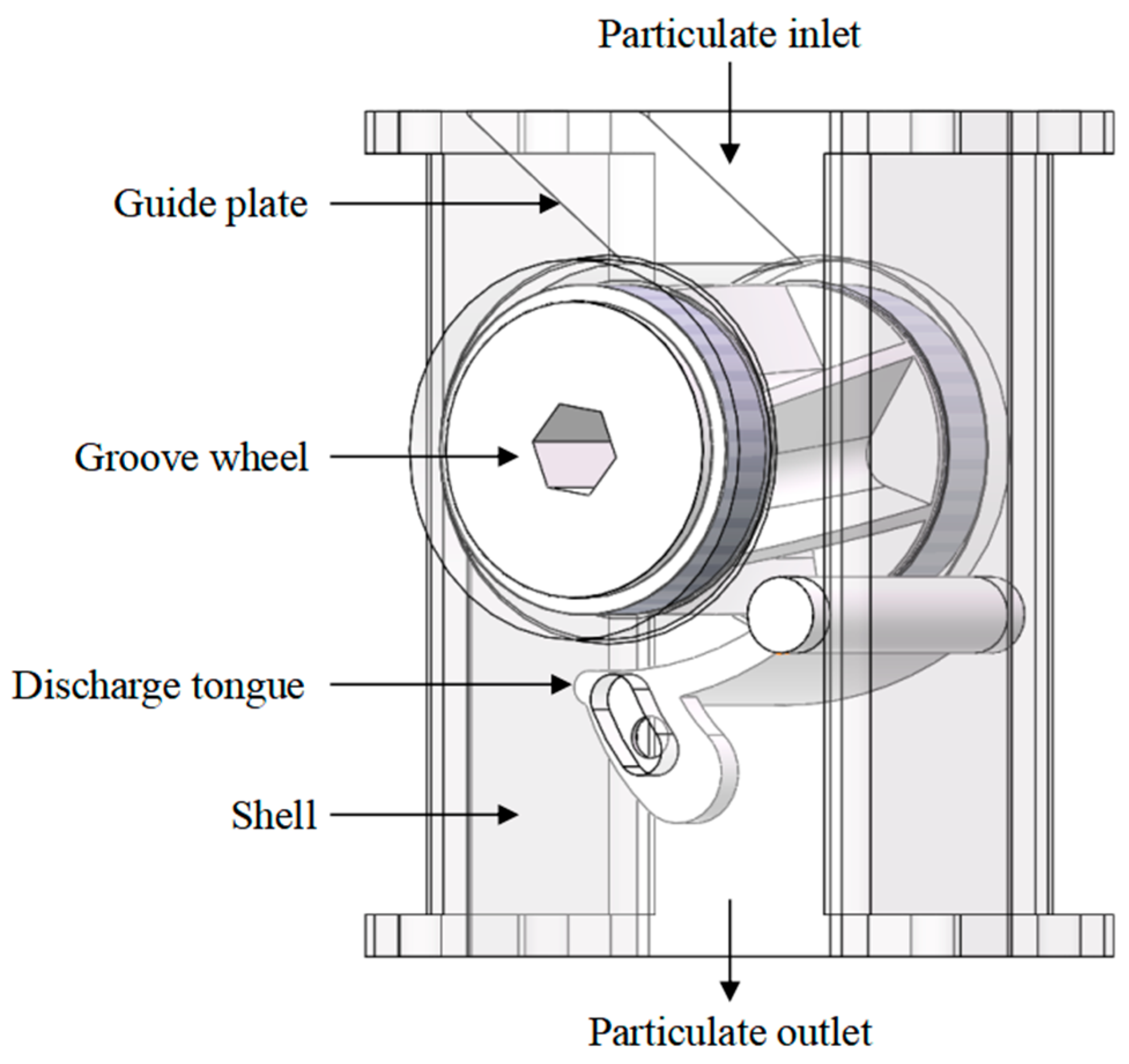
The discharge apparatus is a key component of a UAV spreader, and its performance directly affects the spreading quality [
15]. The centrifugal disc spreading method uses the centrifugal force generated by the spreading disc to spread materials in the field and is currently widely used in UAV-based fertilization, with the advantage of simple structure and high work efficiency but also with the disadvantage of uneven spreading and difficulty in controlling the spreading amplitude. Hwang et al. analyzed the extent to which the movement of the shield hole affects the distribution of fertilizer particles to determine its optimal position to improve the uniformity of fertilizer spreading [
16]. Coetzee et al. established a model to investigate the effect of adding deflector plates under a double centrifugal disc structure on the distribution state of fertilizer particles and the amount of spreading [
17]. Wang et al. proposed a solution that incorporated a horizontal screw auger, curved and straight vanes on the disc, and a cover with bumps to enhance the distribution uniformity of a large discharge rate disc spreader for UAV fertilizer application. This achieved a discharge rate of 190.02 kg/min, with an 8 m operation width and low coefficient of variation (CV) of 14.68% for compound fertilizer application [
18]. Besides the centrifugal disc spreading method, the grooved wheel-based spreading method is widely used and also has a simple structure, low cost, and strong adaptability to particles [
19]. According to the comparative experiments conducted by Song et al., the grooved wheel-based method is able to provide superior performance in precise fertilization for a large application range compared to the centrifugal disc spreading method [
20]. When the grooved wheel rotates at a low speed, periodic pulsation will occur and potentially lead to under-application or omission [
21].
Combined with the aerodynamic solid particle UAV application characteristics of this study, the groove wheel-based spreading method is considered more advantageous in terms of application flexibility and adjustment accuracy [
22]. To achieve the target of discharging with low pulsation and stable application rate, researchers have conducted extensive studies on the optimization parameters of the groove wheel and discharge apparatus. Zheng et al. designed a mechanism for an electromagnetic vibrating-type seeding device that combines a grooved wheel and electromagnetic vibrations to improve the uniformity and stability of seeding [
23]. Sun et al. designed an outer-grooved wheel fertilizer-spreading device, analyzed the speed and force of particles during the process of spreading, and obtained a spiral groove structure to reduce particle damage [
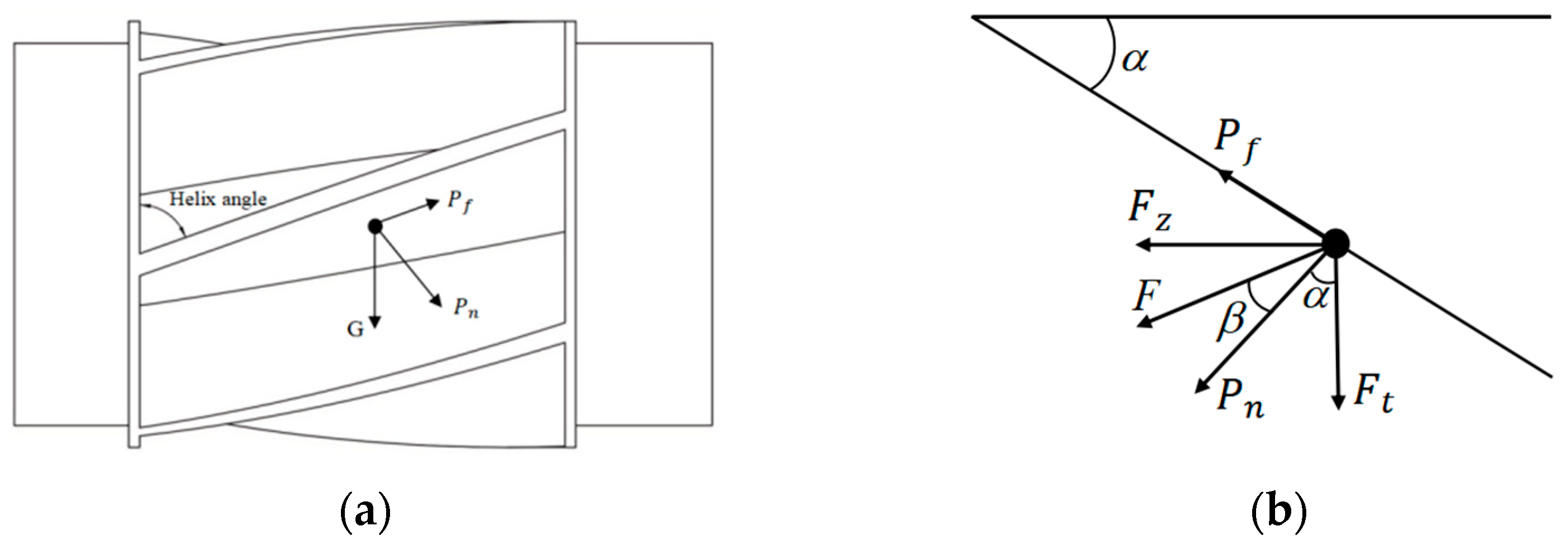
24]. Karayel et al. analyzed the consistency of the seed particle spacing spread using an outer grooved wheel metering device and determined the optimal parameters of the grooved wheel to improve the uniformity of seeding [
25]. All these studies demonstrated that optimizing the structural parameters of the grooved wheel can effectively reduce pulsation and improve discharge stability. However, the above studies were mainly conducted on ground-machinery application scenarios. There is still very little research on groove wheel discharge apparatus for UAVs. Song et al. designed a staggered groove for UAV application to reduce the pulsation phenomenon [
26]. Further research is required to optimize the groove wheel by considering the limitations of the load and size of UAVs and for different application scenarios.
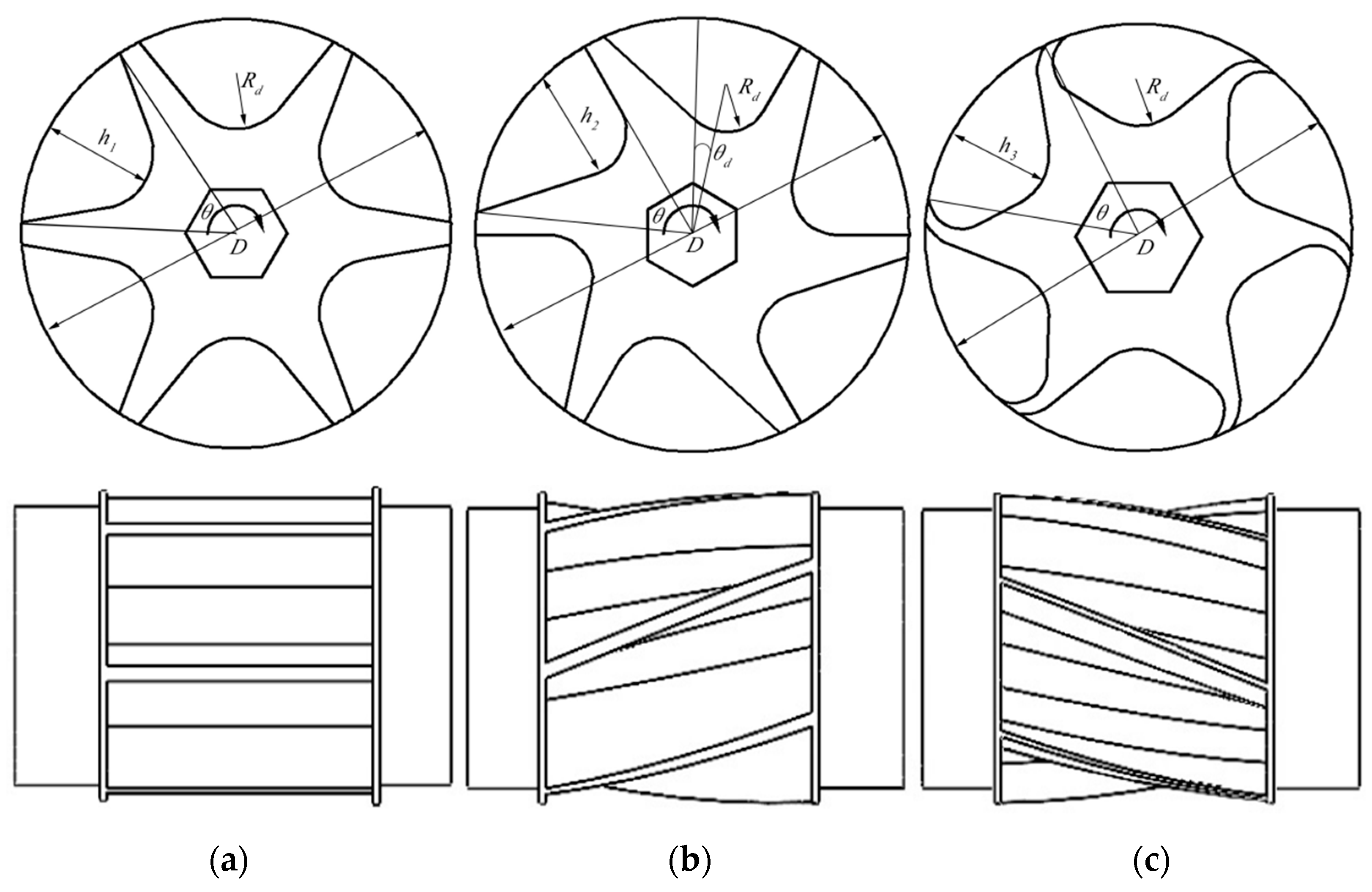
This study investigated a grooved wheel-based discharge apparatus suitable for precise spreading by UAVs to solve the problems of low uniformity and poor precision of UAV-based solid particle spreading. First, the effects of the groove section shape, wheel length, helix angle, and the number of grooves on the stable discharge performance were investigated using the discrete element method. Orthogonal tests were designed to analyze the simulation test results. Based on the significance regression analysis and response surface analysis, the influence of each factor on the stability of the discharge and its pulsation amplitude was analyzed, and the influence level of each factor was further studied. Finally, optimized structural parameters of the grooved wheel were obtained and used to develop a UAV discharge apparatus. Bench tests were performed to evaluate the stability and pulsation amplitude of the designed discharge apparatus.
4. Conclusions
For UAV-based precise spreading of solid particles, such as seeding and fertilization, this research designed an innovative small-sized groove wheel-type discharge apparatus for UAV applications and proposed a solution for groove wheel parameter optimization.
Firstly, three kinds of groove wheel structures of circular, eccentric, and circumscribed arcs were investigated, and an EDEM simulator was established to conduct simulation experiments for optimizing the major parameters such as groove length, helix angle, and numbers.
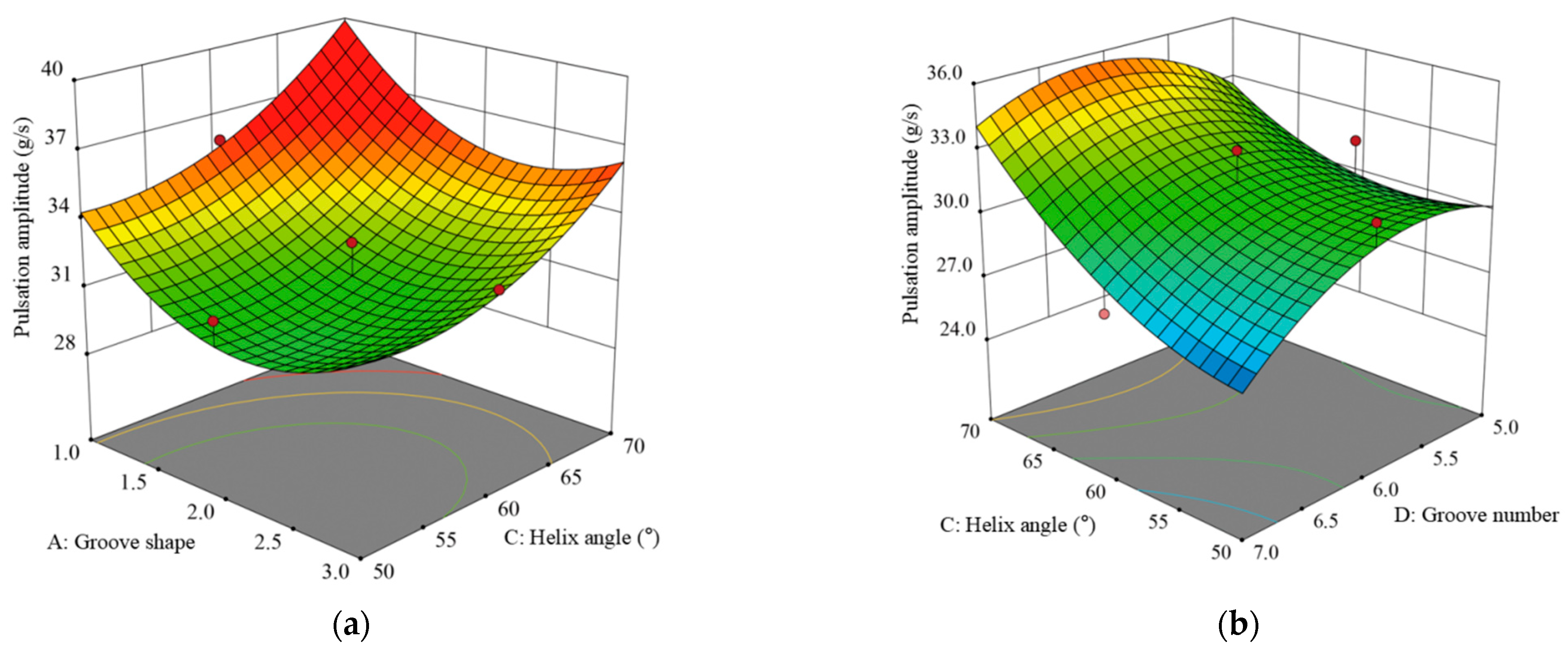
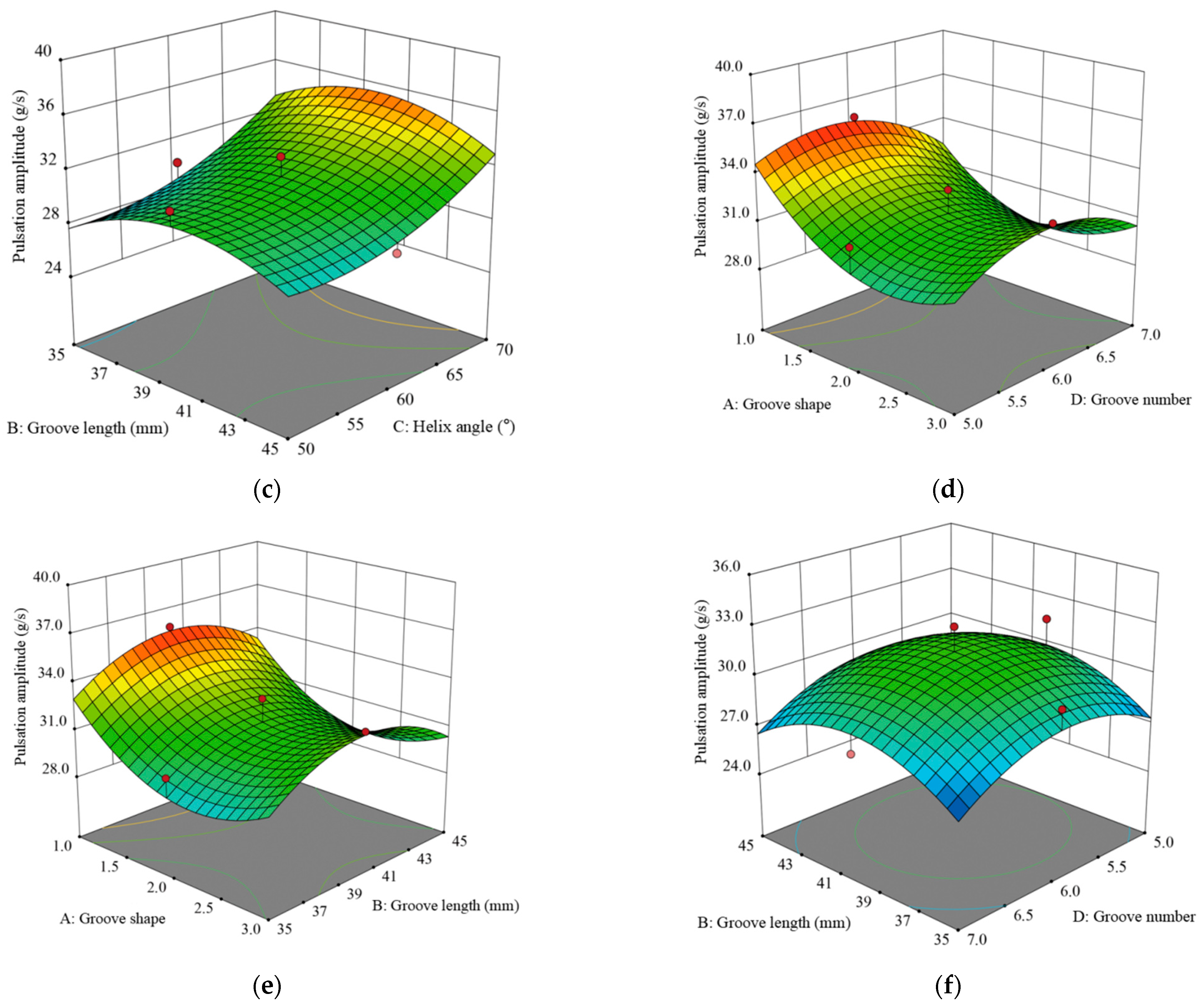
Secondly, the significance of the groove parameters influencing the discharge pulsation amplitude was investigated. By combining orthogonal regression analysis and response surface analysis, the optimal structural parameters of the groove wheel-type spreader were determined. The results showed that the helix angle and groove shape had an extremely significant influence on the pulsation amplitude, and the number of grooves had a significant influence, while the groove length had a non-significant influence on the pulsation amplitude. The optimal wheel combination parameters of the groove shape, groove length, groove helix angle, and number of grooves were determined to be eccentric, 35 mm, 50°, and 7, respectively.
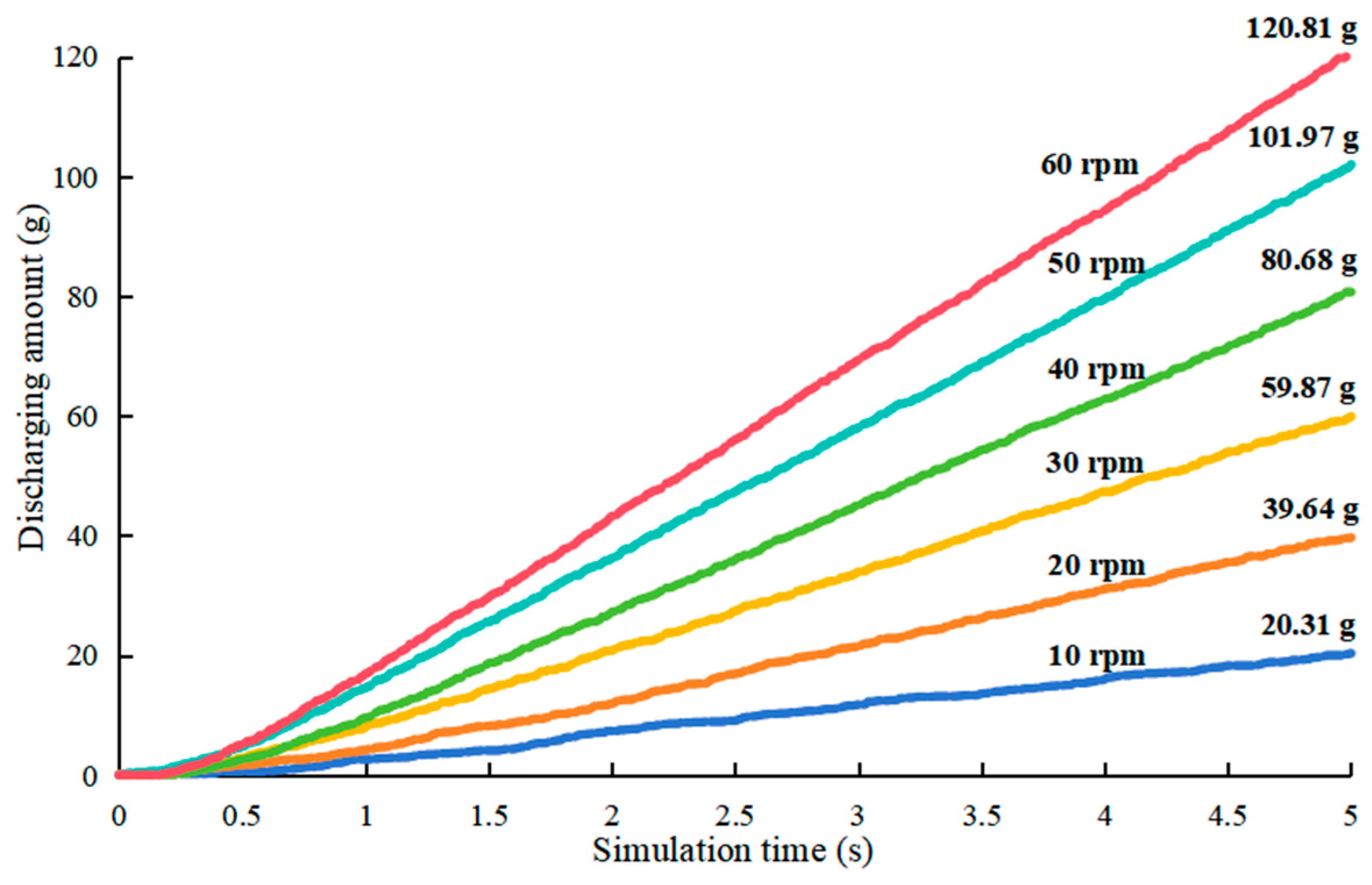
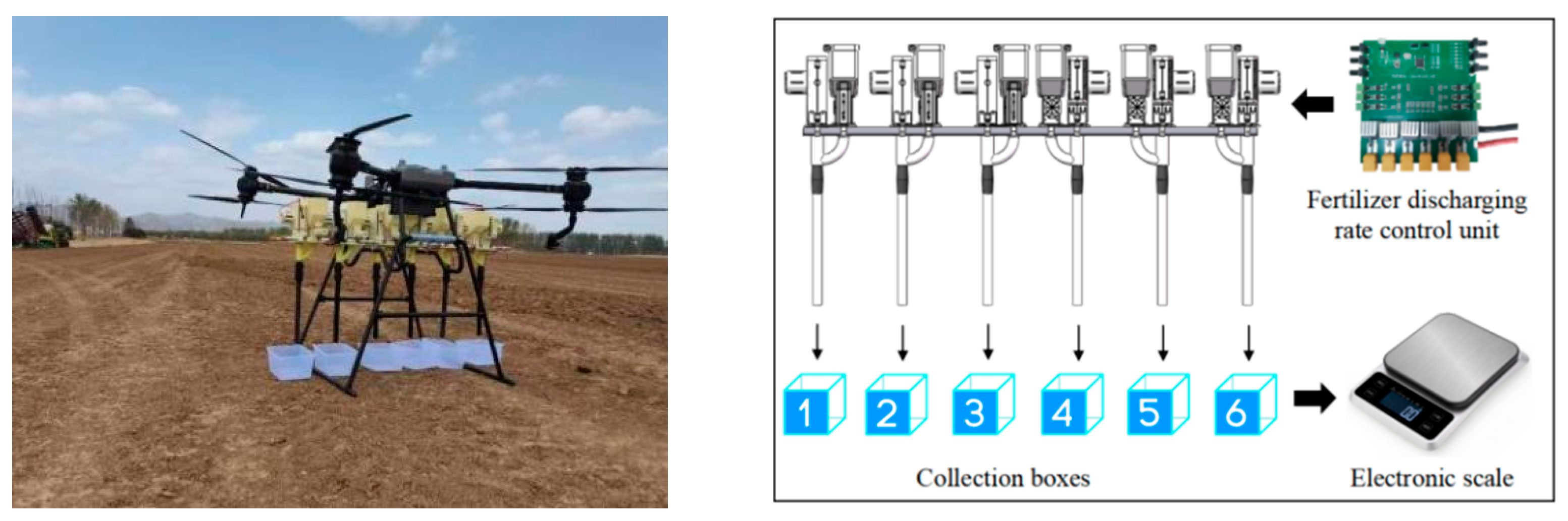
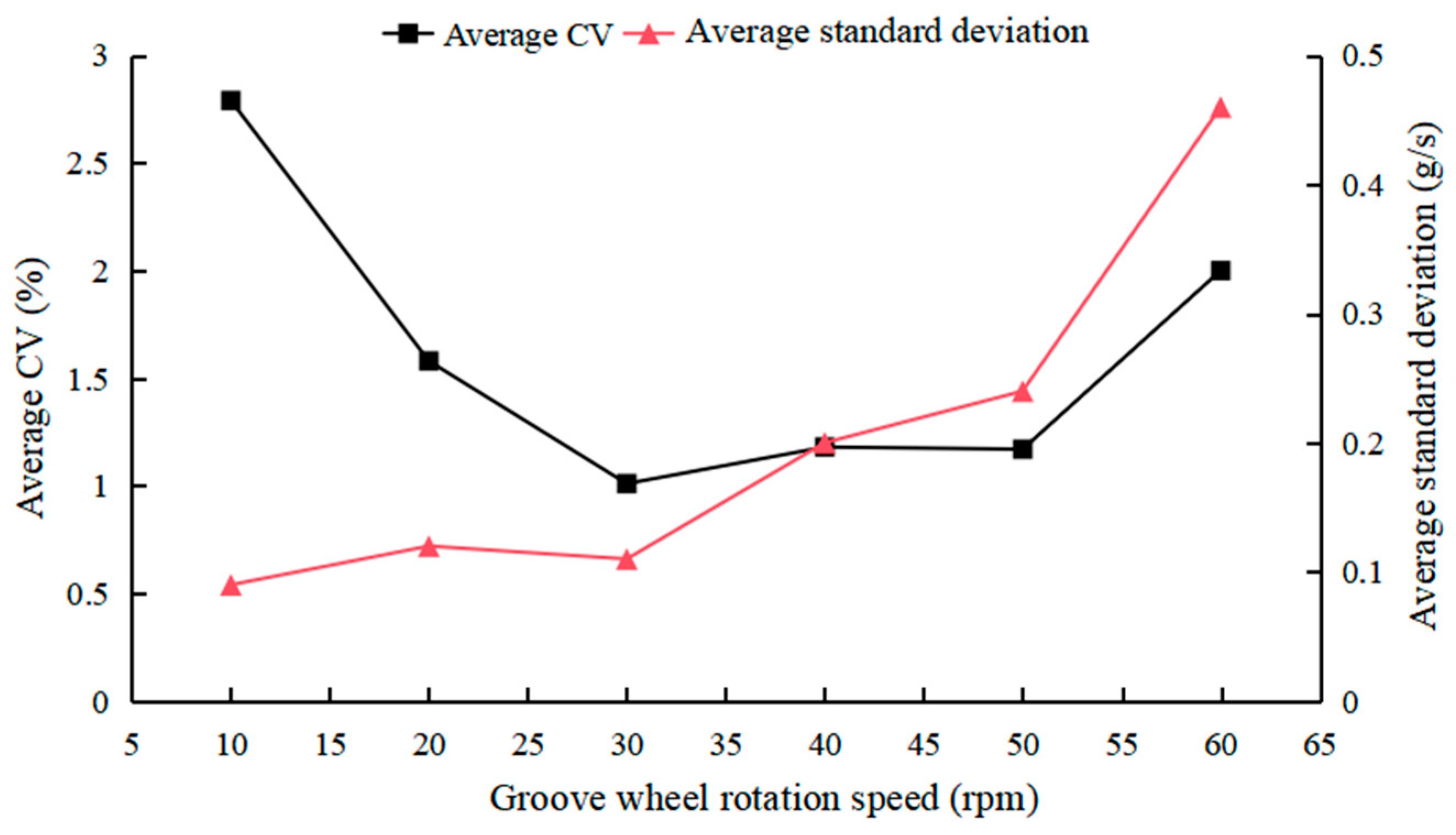
Finally, a solid particle spreader was designed with the parameter of the optimized groove wheel. A bench test was carried out to evaluate the spreading stability and analyze the correlation between the rotation speed of the groove wheel and the spreading rate. The results indicated that when the rotation speed was within the range of 10–60 rpm, the average relative deviation between the bench test and the simulation was 3.93%, the maximum coefficient of variation of the average spreading rate among six spreaders was 2.79%, and the correlation coefficient between the speed of the groove wheel and the spreading rate reached 0.991.
In conclusion, the optimization design method proposed in this research for solid particle spreaders is reasonable and effective. The parameters obtained from the simulation environment can be highly consistent with the actual condition. Based on this research, we will further evaluate and optimize the stability and control accuracy of solid particle materials with different particle sizes in the scenario of seeding and fertilization in our future research.



 ,
, 





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}