
Mission-Based Design and Retrofit for Energy/Propulsion Systems of Solar-Powered UAVs: Integrating Propeller Slipstream Effects


Abstract
1. Introduction
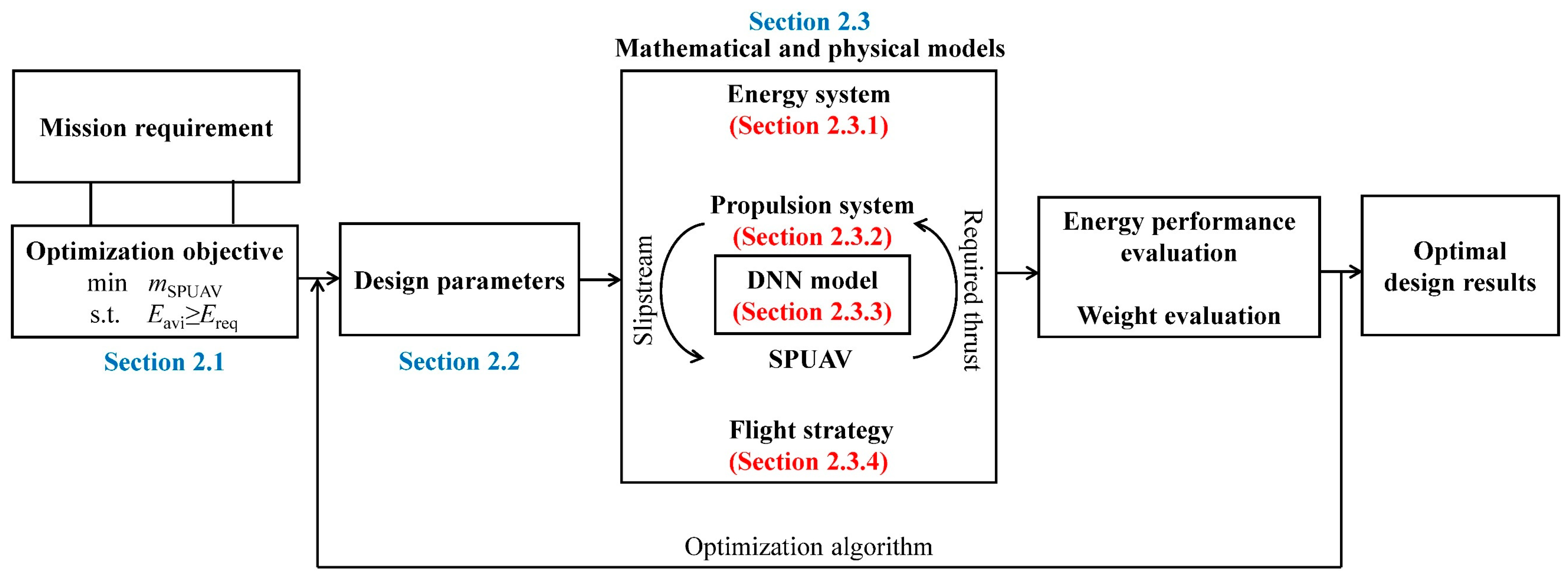
2. High-Fidelity Hybrid Design Framework
2.1. Mission Points and Optimization Objective
2.1.1. Mission Points
2.1.2. Optimization Objective
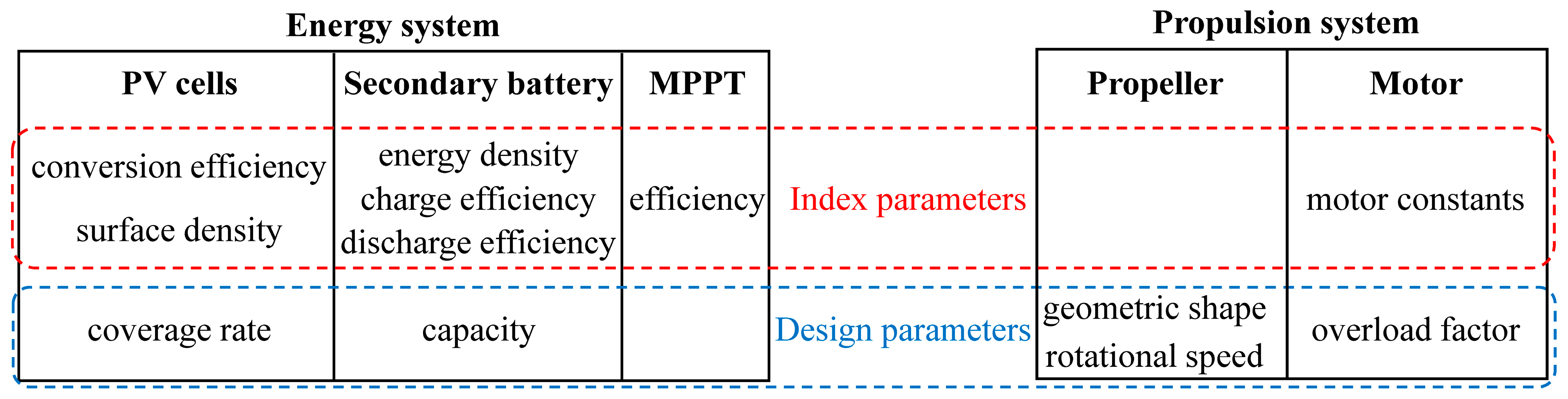
2.2. Design Parameters of the SPUAV
2.3. Mathematical and Physical Models
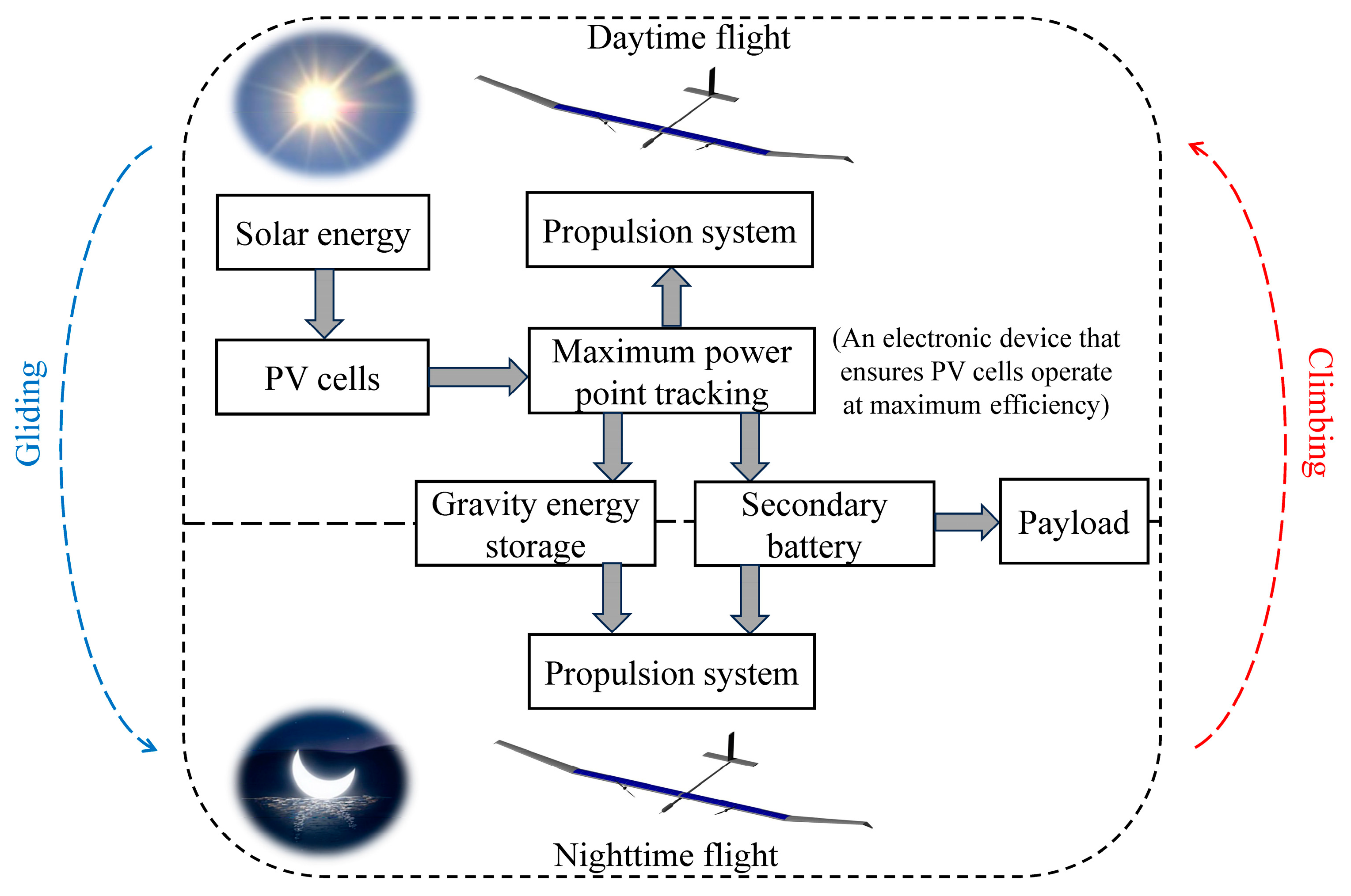
2.3.1. Energy System
- (a)
- PV cells
- (b)
- Secondary battery
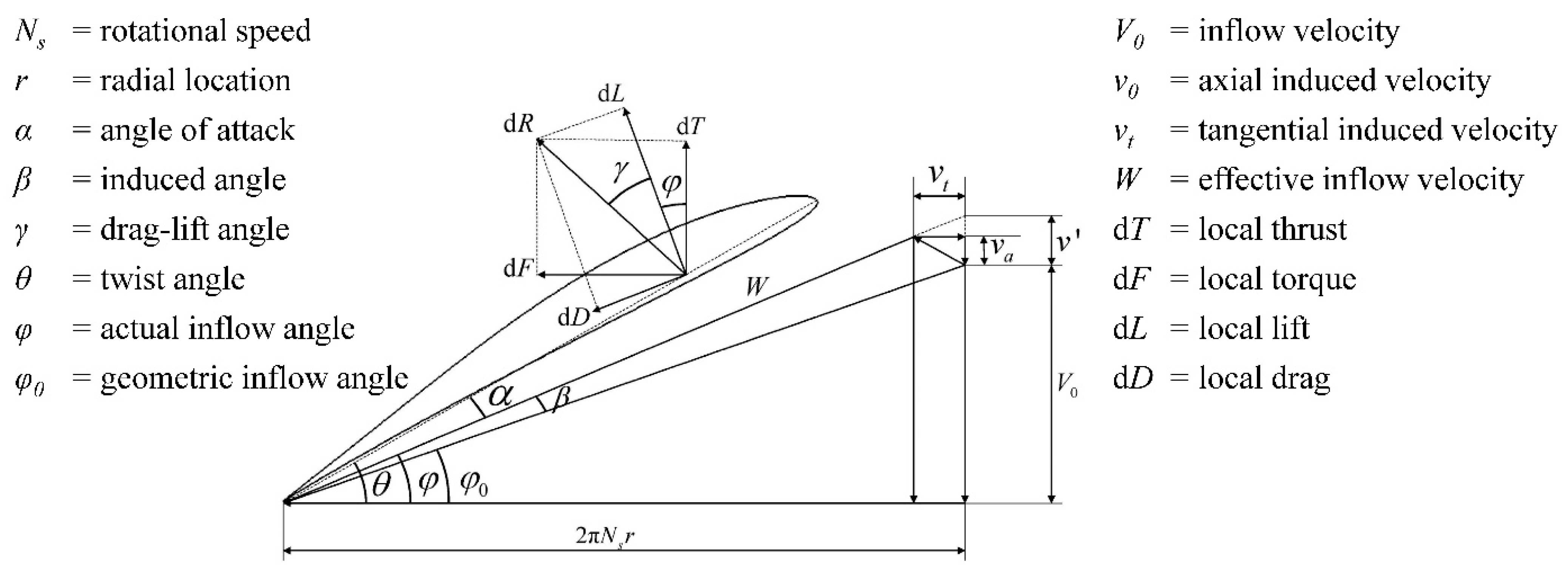
2.3.2. Propulsion System
- (a)
- Propeller
- (b)
- Motor
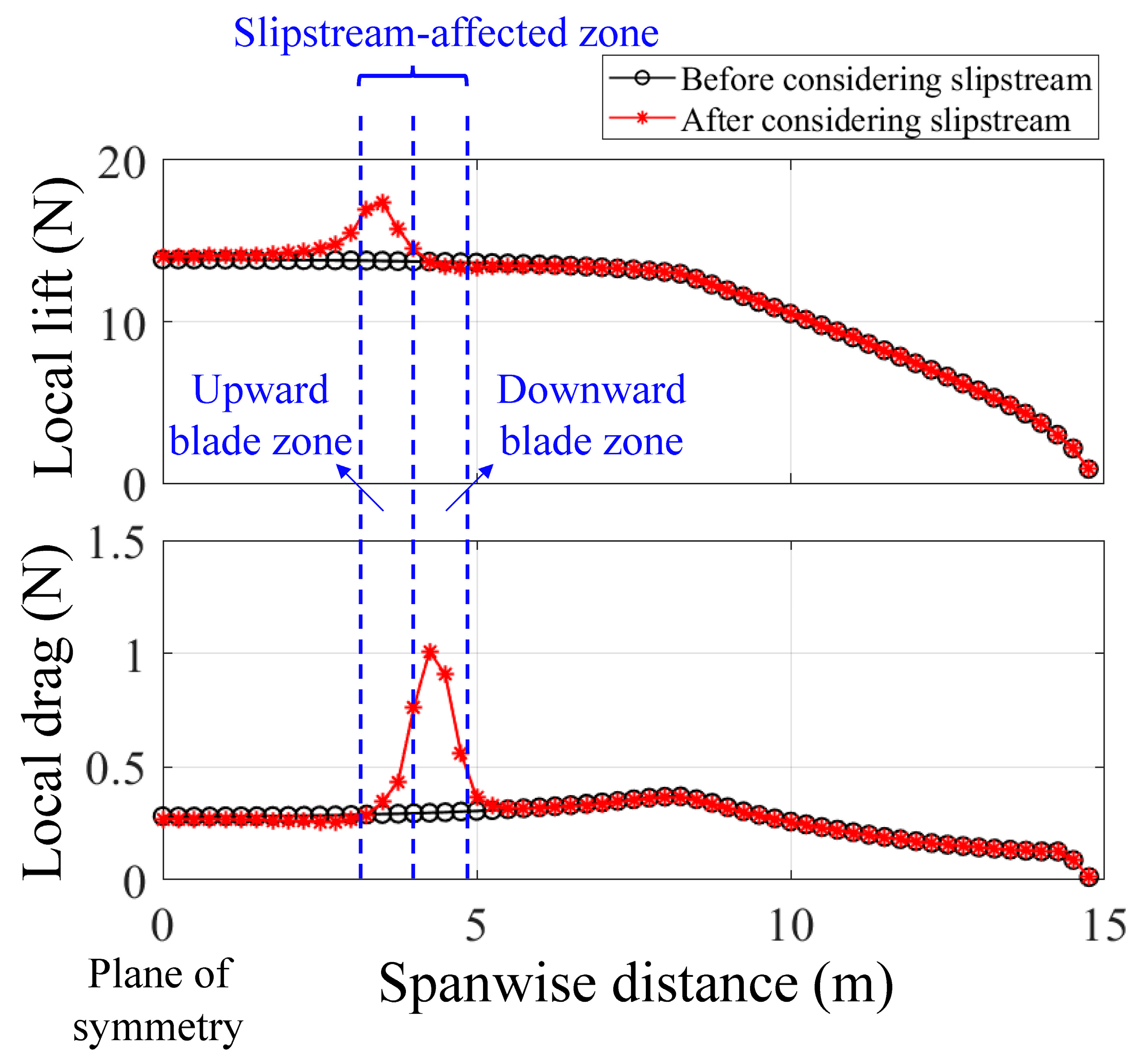
2.3.3. Lift–Drag Characteristics of the SPUAV under Propeller Slipstream Effects
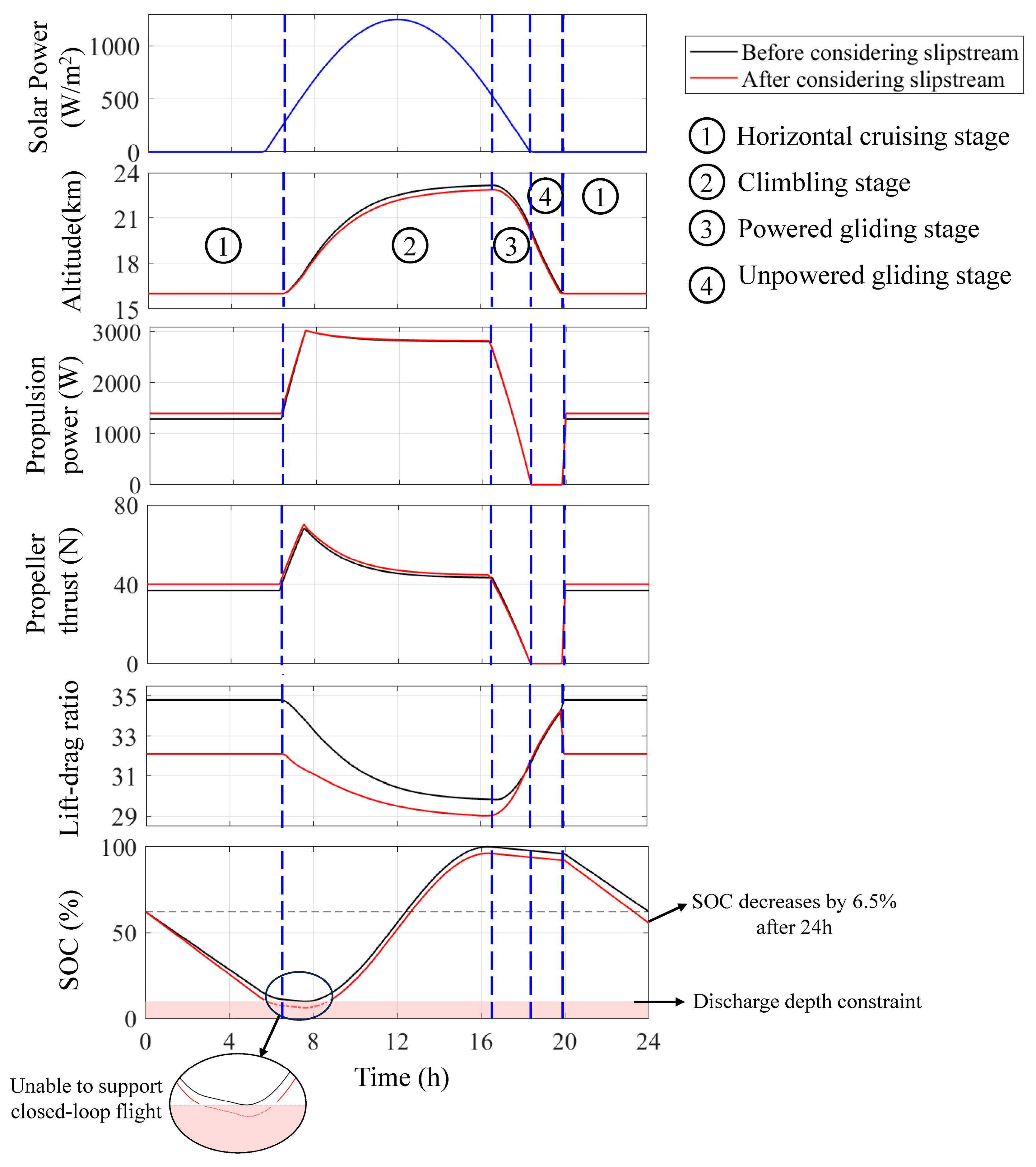
2.3.4. Day–Night Flight Strategy
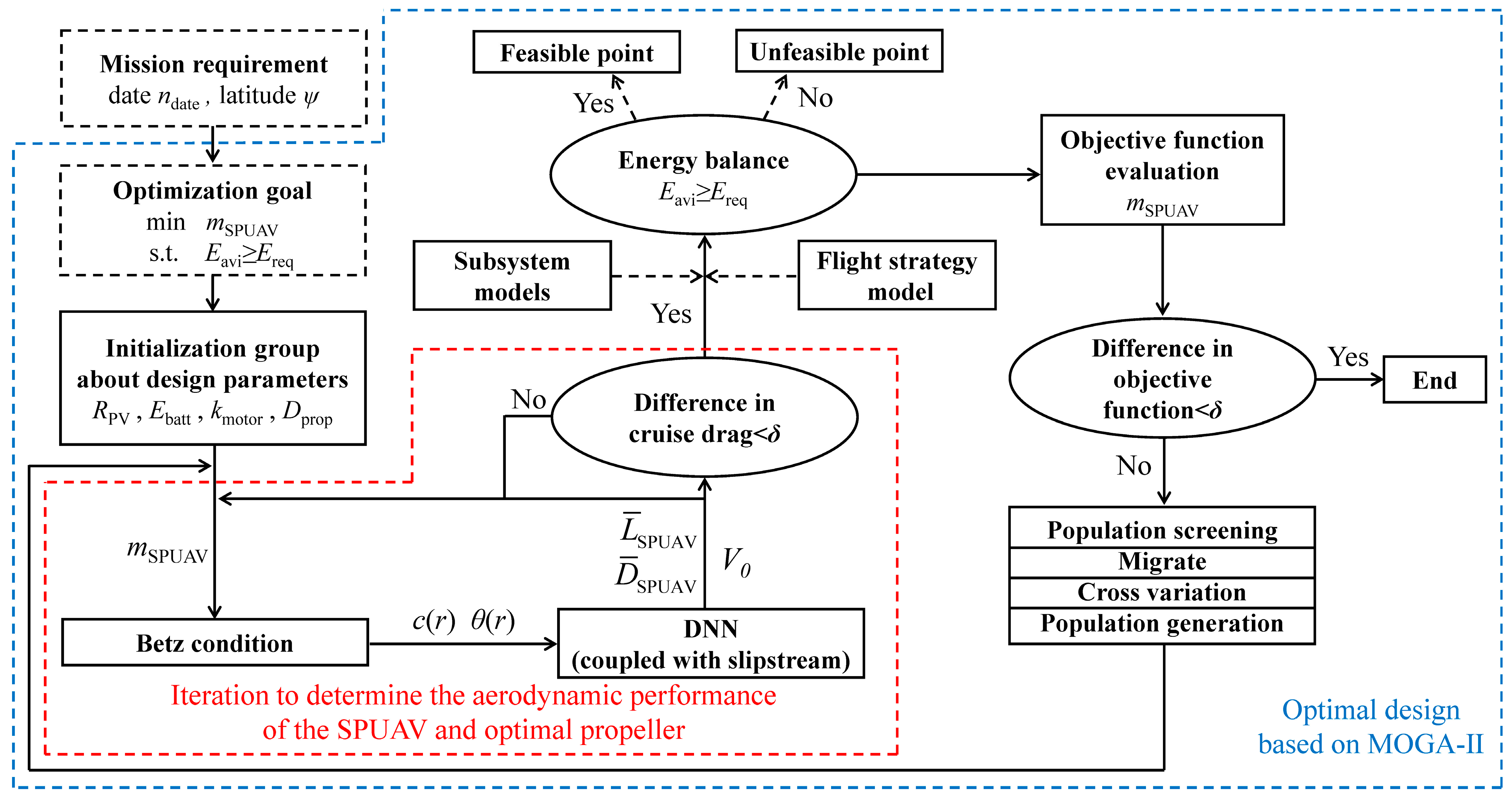
2.4. Optimal Design Framework
- Step 1: The design space is sampled to form the initial population based on the Uniform Latin Hypercube method.
- Step 2: Since the required propeller thrust is determined by the cruise drag of the SPUAV, the lift–drag characteristics are, in turn, impacted by the propeller slipstream. The coupling between these two factors necessitates iterative solutions for each sample point in the optimization design process. This forms a sub-iteration process. We start with the cruise drag of the SPUAV. In the first iteration, since the propeller slipstream pattern is initially undetermined, the DNN model for the case without propeller slipstream, as described in Section 2.3.3, is used to preliminarily estimate the lift–drag characteristics of the SPUAV. After obtaining the required thrust, we use the Betz condition described in Section 2.3.2 to determine the optimal propeller. Subsequently, the DNN model considering propeller slipstream effects is employed to determine the actual lift–drag characteristics of the SPUAV under slipstream effects. The total weight, cruise speed, and required thrust of the SPUAV are then reevaluated, and these updated inputs are used in the Betz condition to start the next iteration. The above process is repeated until convergence is achieved. We use the change in cruise drag as the convergence criterion. When the change in cruise drag is less than 0.1 N, convergence is considered to have been reached. According to our experience, this typically requires three to four iterations.
- Step 3: In combination with the subsystem models and flight strategy model described in Section 2.3, the time-varying state parameters of the SPUAV throughout a day can be derived. Specifically, these include the lift–drag characteristics of the SPUAV, flight speed, altitude, climb/glide rate, propulsion system efficiency, and battery level at each moment. Through these time-varying state parameters, the flight path and energy spectrum of the SPUAV throughout a day can be constructed. If the energy consumed by the SPUAV throughout a day is less than the solar energy that can be acquired during the same timeframe, it indicates that the SPUAV can realize day–night closed-loop flight. Conversely, energy consumption exceeding the solar energy acquisition signals the infeasibility of the design scheme.
- Step 4: Based on the preceding steps, we utilize the genetic algorithm MOGA-II for the optimization of the SPUAV [40]. The optimization objective is to minimize the overall weight of the SPUAV, ultimately yielding the optimal design scheme capable of closed-loop flight under specific mission requirements. MOGA-II is a robust evolutionary optimization technique. The main steps of this optimization technique include initialization, evaluation, selection, crossover, mutation, replacement, and iteration. In this study, the probability of directional crossover, selection, mutation, and DNA string mutation ratio are specified as 0.5, 0.05, 0.1, and 0.05, respectively. Additionally, for the genetic algorithm optimization process, the algorithm terminates when the change in the best objective function value falls below 0.1 kg over 20 consecutive generations.
3. Case Study
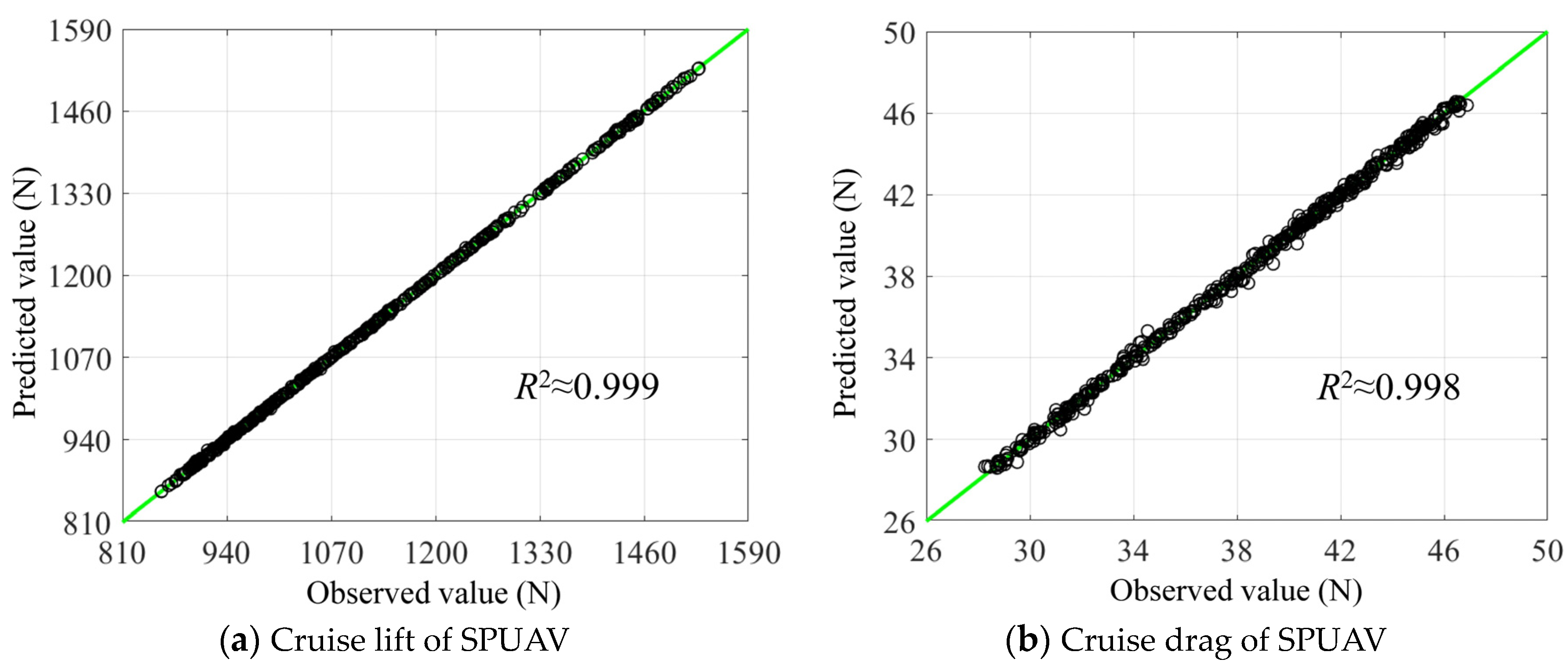
3.1. DNN Model
3.2. Optimal Design and Analysis
3.2.1. Optimal Design at a Single Mission Point
- (a)
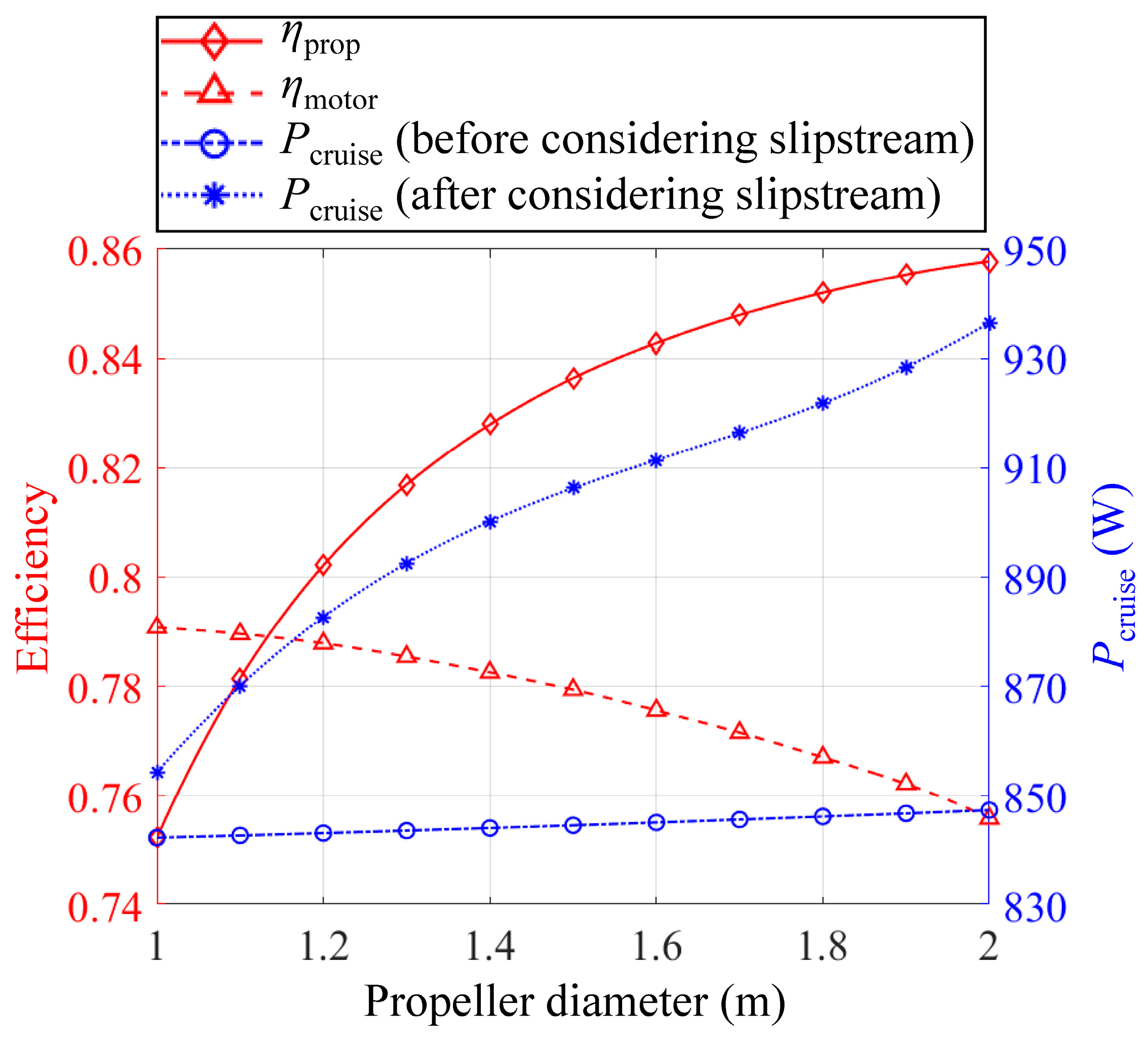
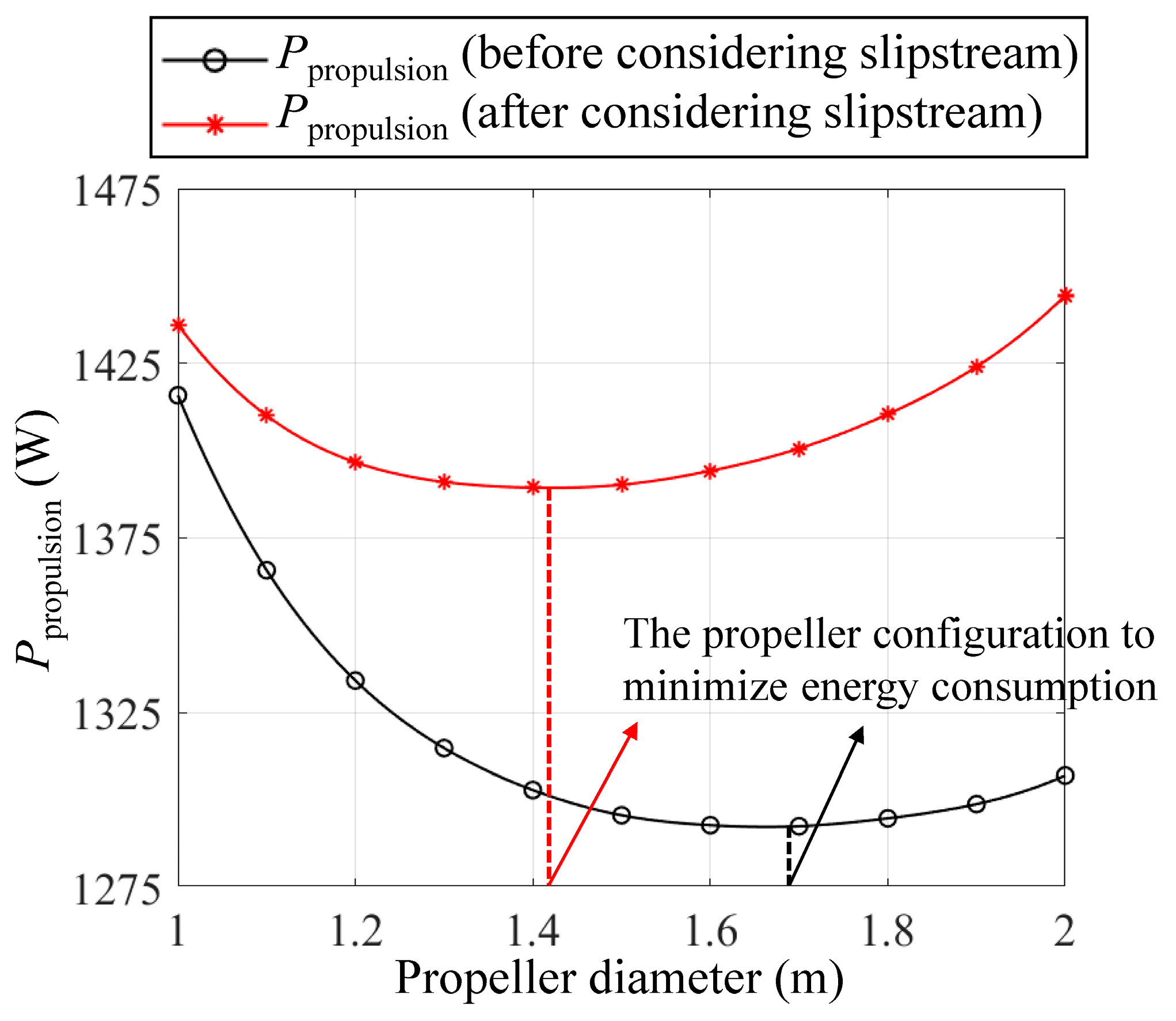
- As the propeller diameter increases, the propeller efficiency also improves, which can be explained through the actuator disk theory. In this idealized model, a circular disk is used to represent the action of the propeller. Combining the momentum and mass conservation equations, the propeller efficiency can be expressed aswhere Tprop is the thrust of the propeller, V0 is the cruise speed of the SPUAV, and Dprop is the propeller diameter. Equation (21) elucidates a positive correlation between propeller efficiency and diameter. From a physical standpoint, in the case of generating the same thrust, the propeller with a larger diameter propels a greater mass of air, resulting in a reduction in the induced velocity, which serves to diminish the induced losses during the operational phase of the propeller.
- (b)
- The propeller with a larger diameter corresponds to a relatively lower rotational speed and higher torque. This results in an increased operational current and internal resistance losses, leading to a decline in the motor efficiency [27].
- (c)
- When the effects of the propeller slipstream are not considered, the required cruising power Pcruise increases slightly with the increase in propeller diameter, primarily due to the added weight of the larger propeller. However, after considering the propeller slipstream, Pcruise shows more pronounced changes.
3.2.2. Retrofit Design at Multiple Mission Points
4. Conclusions
- (1)
- The propeller slipstream results in a maximum reduction of the lift–drag ratio for the SPUAV by up to 2.7, with the extent of the reduction depending on the flight stage of the SPUAV. The proposed design framework is capable of accurately quantifying the effects of the propeller slipstream under various flight conditions.
- (2)
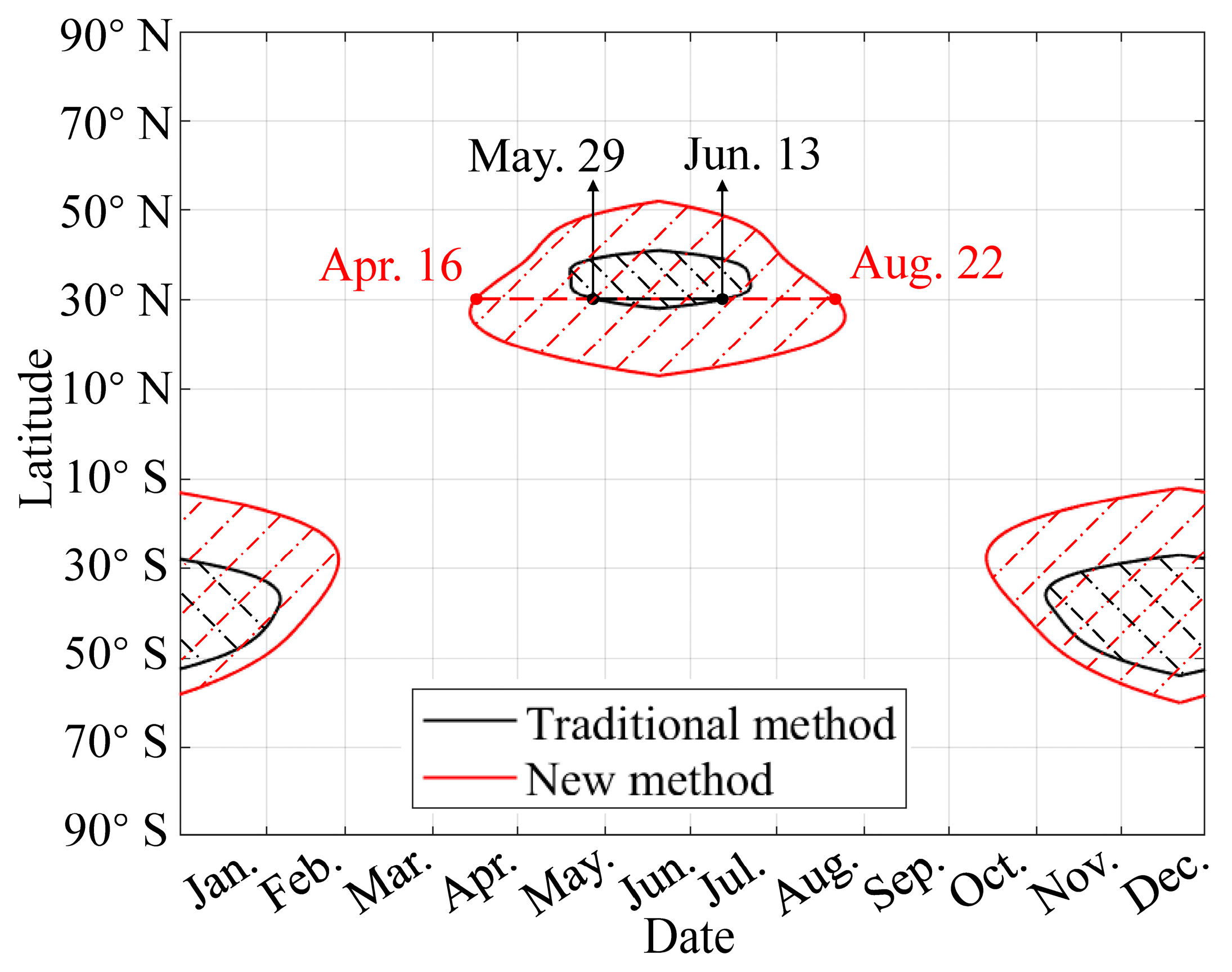
- Traditional SPUAV design methods that ignore the adverse effects of slipstream lead to design results that fail to fulfill the established mission requirements. This oversight results in a contraction of the feasible mission region from 109 days to 46 days for a latitude of 30° N.
- (3)
- The proposed design framework is able to integrate the effects of the propeller slipstream and provide more rational top-level designs. The results indicate that the proposed method avoids the aforementioned reduction in feasible mission region with an additional weight of about 15.9%. This helps to scientifically allocate design margins for the SPUAV at the top-level design stage.
- (4)
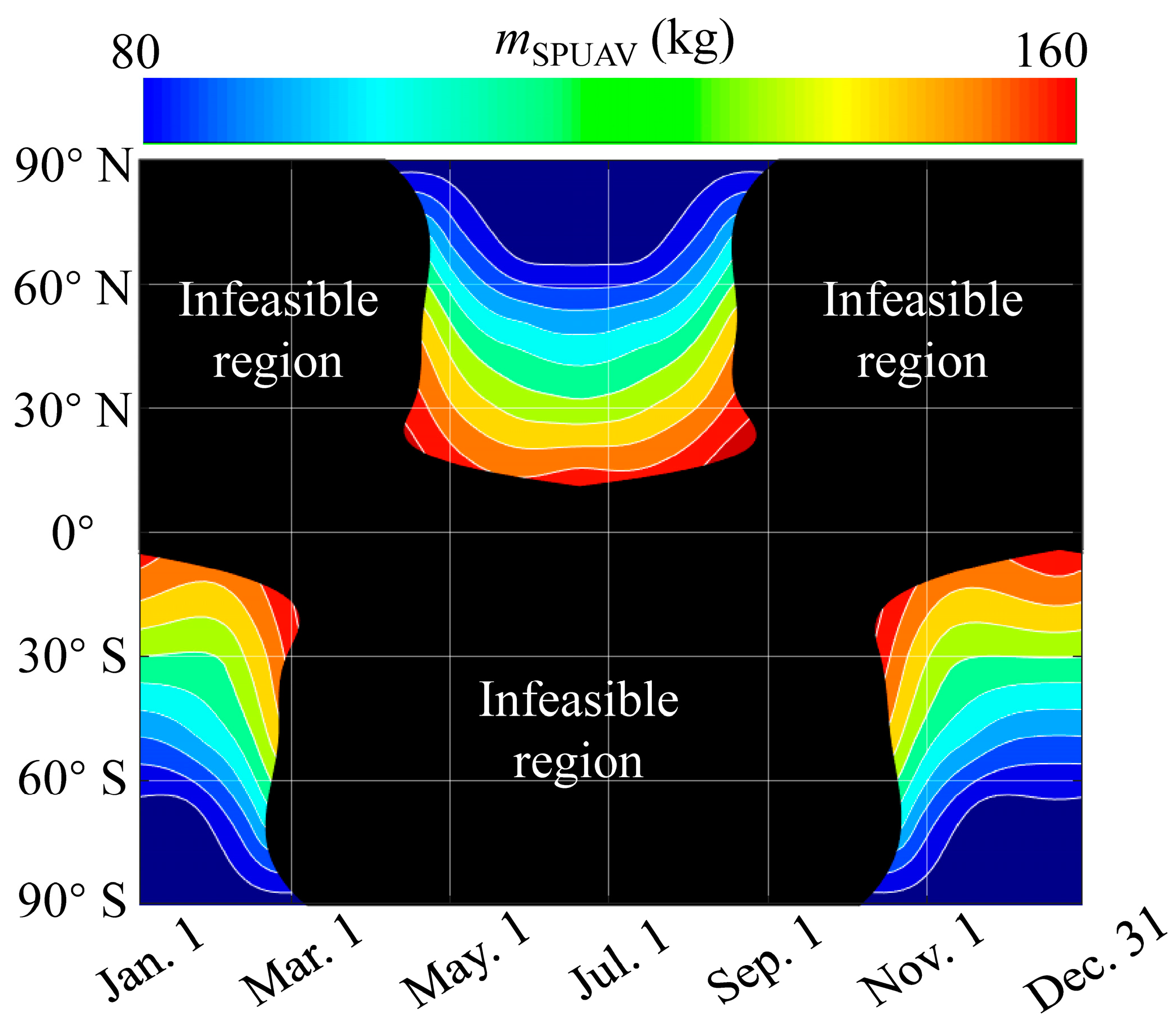
- Taking the Northern Hemisphere as an example, the feasible mission region for the proposed method spans from 14 April to 28 August across latitudes 13° N to 52° N. In contrast, the feasible mission region for the traditional method spans from 20 May to 23 July, across latitudes 28° N to 41° N. Overall, the area of the feasible mission region for the proposed method is approximately 3.3 times larger than that of the traditional method.
- (5)
- Employing the proposed design framework for the secondary configuration of the energy and propulsion systems can further expand the feasible mission region to 2.5 times its original size without necessitating changes to the aerodynamic shape of the SPUAV. This improves the applicability of the SPUAV to a wide range of mission scenarios.
- (6)
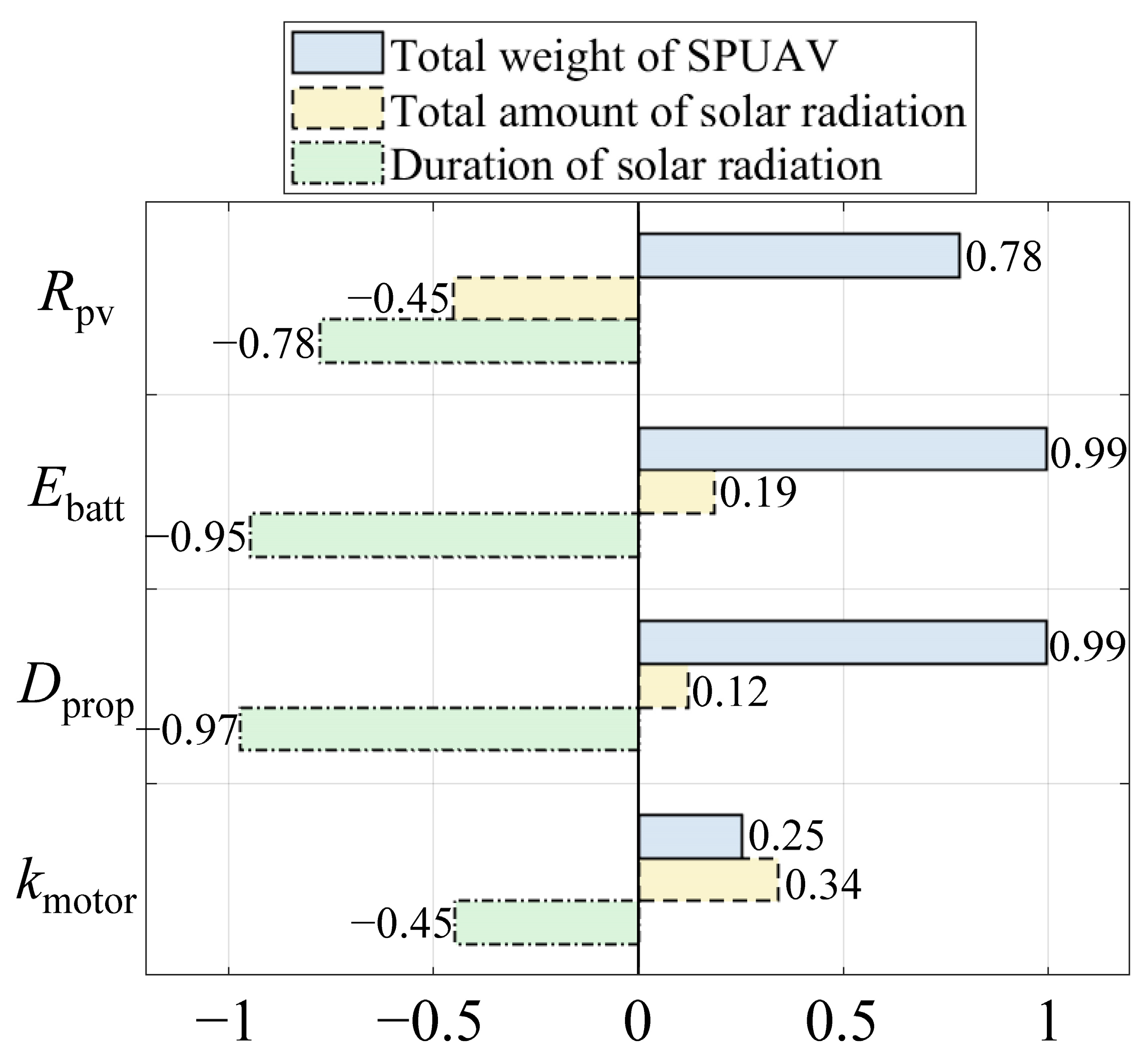
- The variation trends in optimal design solutions across the entire mission region are explored. The results reveal that differences in the duration and total amount of solar radiation at different mission points lead to variations in the optimal design solutions.
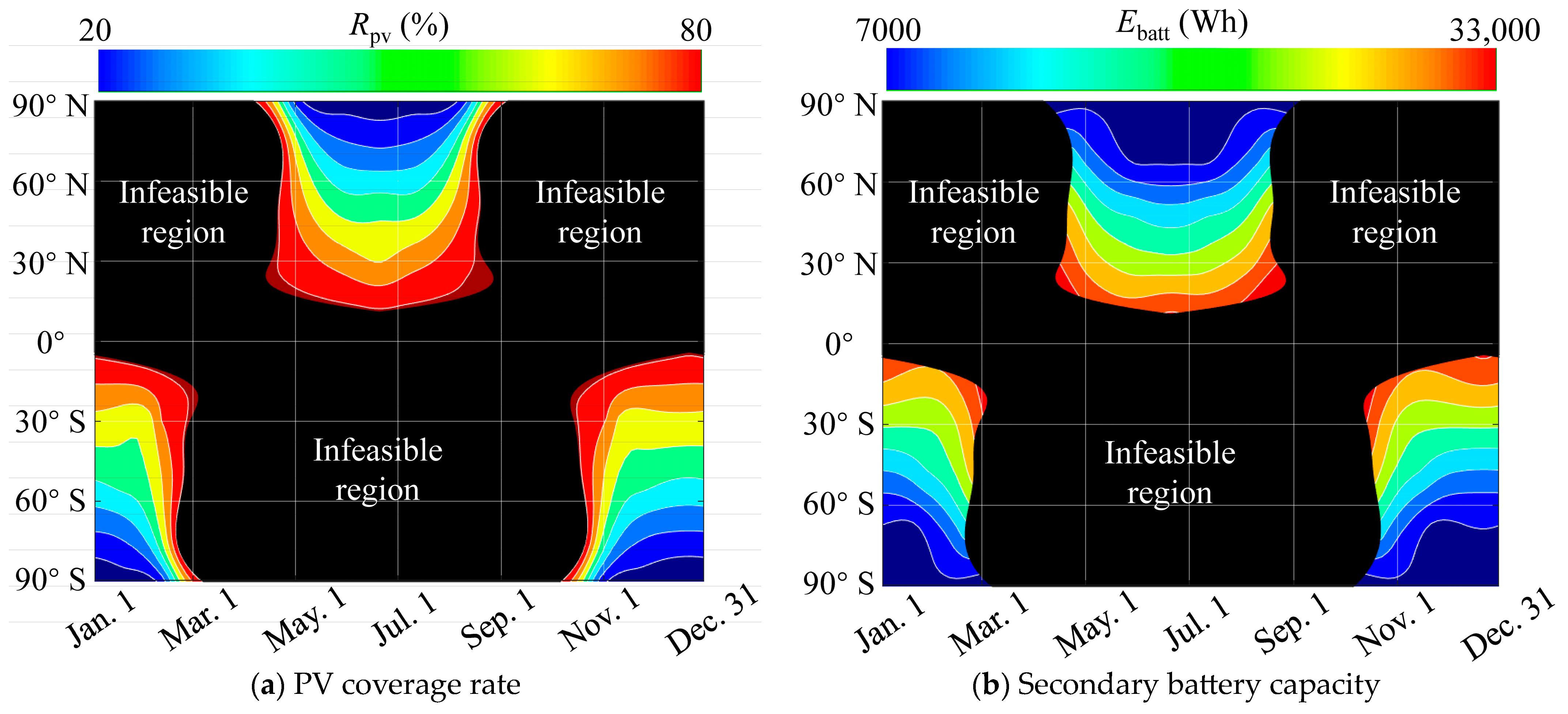
- (a)
- The optimal PV coverage rate is negatively correlated with the duration and total amount of solar radiation. In polar regions with extended daylight, the coverage ratio only needs to be around 20%, while near the boundary of the feasible mission region, the coverage ratio reaches the upper limit (80%).
- (b)
- The function of the secondary battery is to provide the energy required for nighttime flight. Therefore, the optimal battery capacity mainly depends on the duration of solar radiation and is not significantly related to the total amount of solar radiation. In low-latitude regions, where solar radiation duration is approximately 12 h, secondary batteries with a capacity exceeding 30,000 Wh are required. In high-latitude regions, the presence of continuous daylight significantly reduces the battery capacity requirement to below 10,000 Wh.
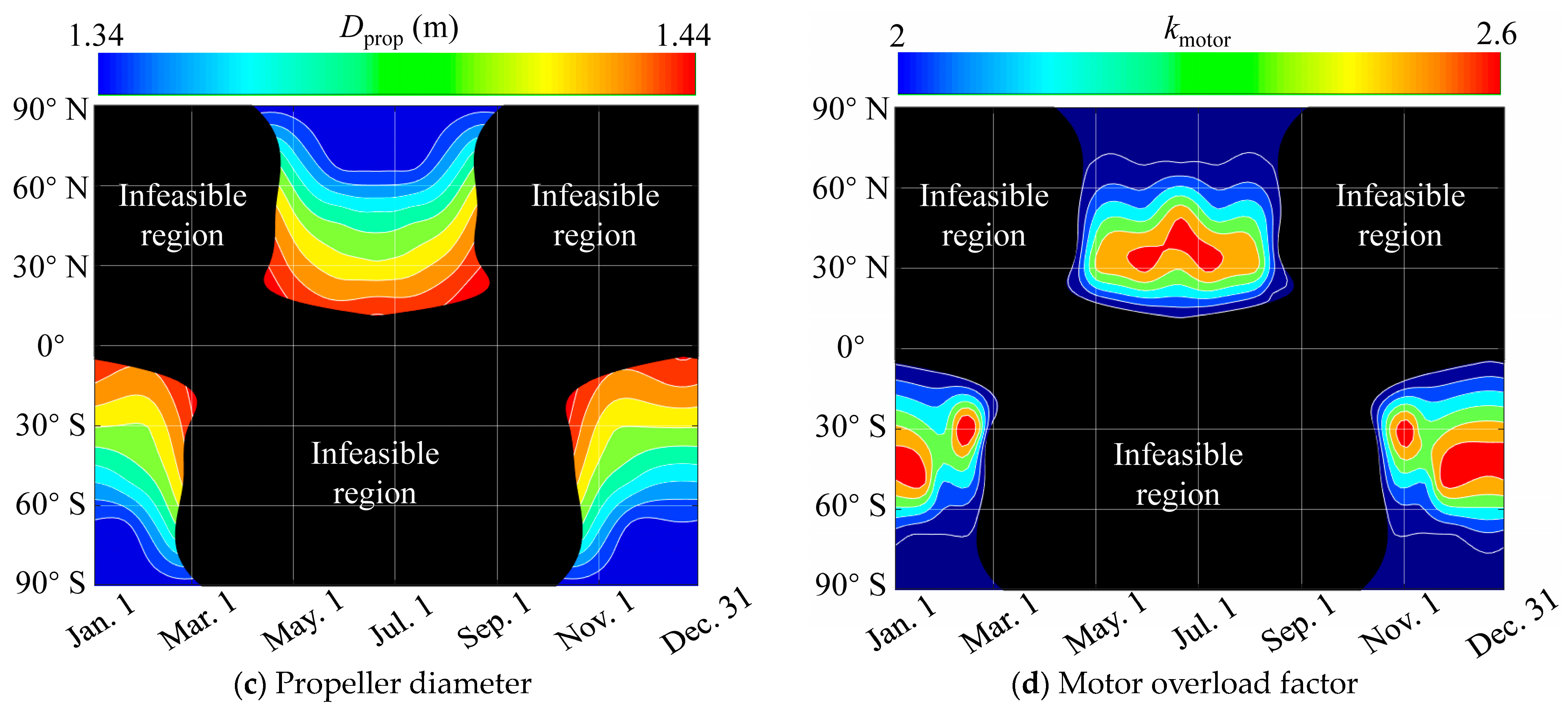
- (c)
- The propeller diameter not only determines the efficiency of the propulsion system but also affects the lift–drag characteristics of the SPUAV. The optimal propeller diameter, which ranges between 1.34 m and 1.44 m, is the result of balancing multiple factors, with the aim of minimizing the total power consumption of the system. As the total weight of the SPUAV increases, the optimal propeller diameter also increases.
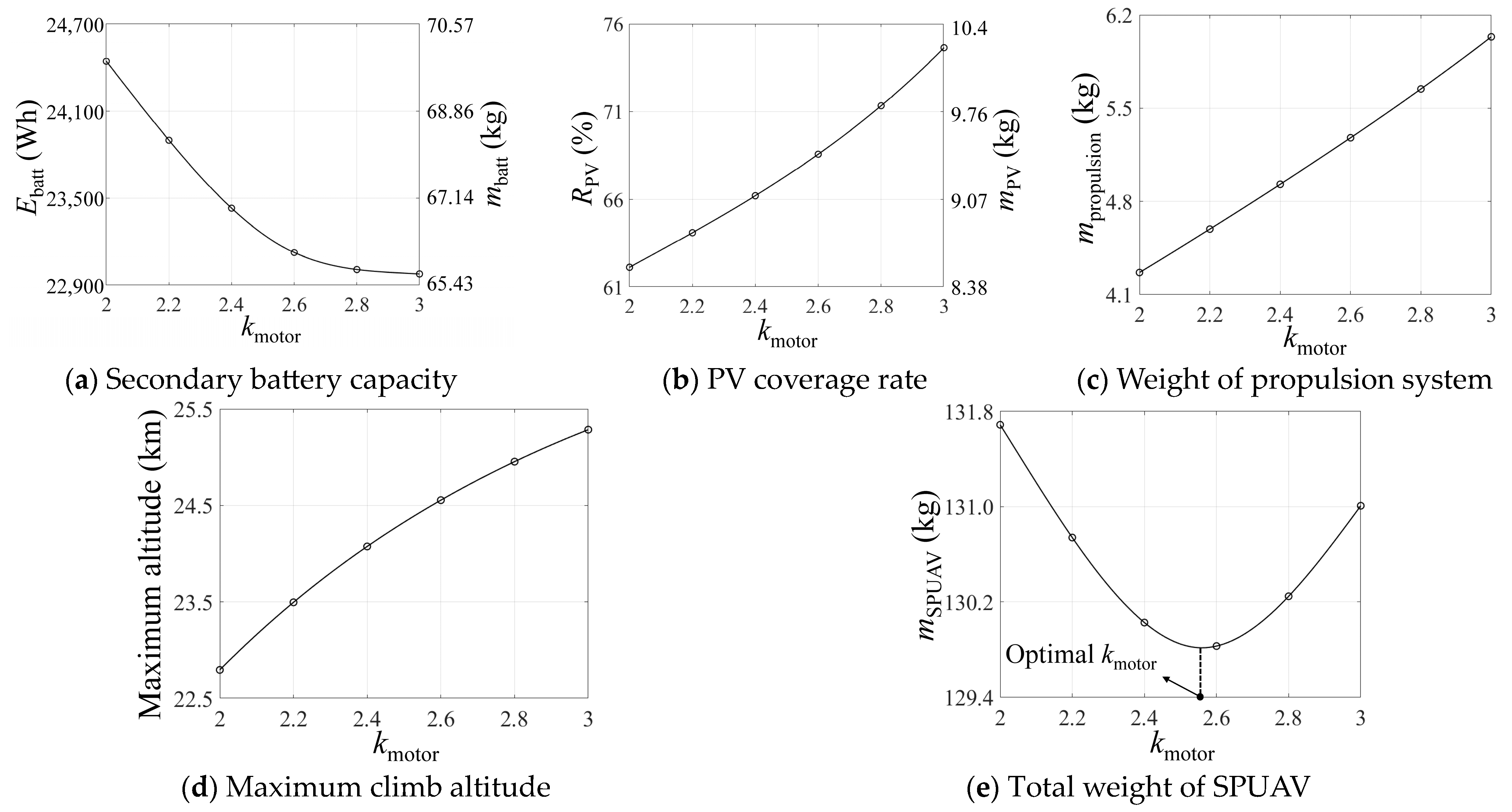
- (d)
- The motor overload factor is a critical parameter that determines the climb rate and maximum climb altitude of the SPUAV. A larger motor overload factor enables more gravitational potential energy to be stored during the day, thus reducing the need for secondary battery capacity. However, it also leads to an increase in the weight of the PV cells and propulsion system. An appropriate motor overload factor can lead to a maximum reduction of approximately 1.9 kg in the overall weight of the SPUAV.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Abbe, G.; Smith, H. Technological development trends in Solar-powered Aircraft Systems. Renew. Sustain. Energy Rev. 2016, 60, 770–783. [Google Scholar] [CrossRef]
- Noth, A. Design of Solar Powered Airplanes for Continuous Flight. Ph.D. Dissertation, Swiss Federal Institute of Technology, Zurich, Switzerland, 2008. [Google Scholar]
- Li, X.H.; Sun, K.J.; Li, F. General optimal design of solar-powered unmanned aerial vehicle for priority considering propulsion system. Chin. J. Aeronaut. 2020, 33, 2176–2188. [Google Scholar] [CrossRef]
- Bakar, A.; Ke, L.; Liu, H.B.; Xu, Z.Q.; Wen, D.S. Design of low altitude long endurance solar-powered UAV using genetic algorithm. Aerospace 2021, 8, 228. [Google Scholar] [CrossRef]
- Wu, M.J.; Shi, Z.W.; Ang, H.S.; Xiao, T.H. Theoretical study on energy performance of a stratospheric solar aircraft with optimum Λ-shaped rotatable wing. Aerosp. Sci. Technol. 2020, 98, 105670. [Google Scholar] [CrossRef]
- Turk, I.; Ozbek, E.; Ekici, S.; Karakoc, T.H. A conceptual design of a solar powered UAV and assessment for continental climate flight conditions. Int. J. Green Energy 2022, 19, 638–648. [Google Scholar] [CrossRef]
- Hwang, H.; Cha, J.; Ahn, J. Solar UAV design framework for a HALE flight. Aircr. Eng. Aerosp. Technol. 2019, 91, 927–937. [Google Scholar] [CrossRef]
- Jiajan, W.; Kampoon, J.; Klongtrujrok, J.; Yuthayanon, I. Conceptual design of tactical solar power UAV. IOP Conf. Ser. Mater. Sci. Eng. 2019, 501, 012011. [Google Scholar] [CrossRef]
- Chu, Y.; Ho, C.; Lee, Y.; Li, B. Development of a Solar-Powered Unmanned Aerial Vehicle for Extended Flight Endurance. Drones 2021, 5, 44. [Google Scholar] [CrossRef]
- Zhu, X.F.; Guo, Z.; Hou, Z.X.; Gao, X.Z.; Zhang, J.T. Parameter’s sensitivity analysis and design optimization of solar-powered airplanes. Aircr. Eng. Aerosp. Technol. 2016, 88, 550–560. [Google Scholar] [CrossRef]
- Cao, X.; Liu, L. State-of-Charge Trajectory Planning for Low-Altitude Solar-Powered Convertible UAV by Driven Modes. Drones 2024, 8, 80. [Google Scholar] [CrossRef]
- Xiang, J.W.; Kan, Z.; Shao, H.Y.; Li, H.D.; Dong, X.; Li, D.C. A review of key technologies for long-endurance unmanned vehicle. J. Harbin. Inst. Technol. 2020, 52, 57–77. (In Chinese) [Google Scholar]
- Nam, T. A Generalized Sizing Method for Revolutionary Concepts under Probabilistic Design Constraints. PhD Dissertation, Georgia Institute of Technology, Atlanta, GA, USA, 2007. [Google Scholar]
- Wang, K.L.; Zhou, Z.; Zhu, X.P.; Xu, X.P. Aerodynamic design of multi-propeller/wing integration at low Reynolds numbers. Aerosp. Sci. Technol. 2019, 84, 1–17. [Google Scholar] [CrossRef]
- Sun, K.J.; Bao, X.X.; Fu, Y.W. Low Reynolds number propeller slipstream interference with wing aerodynamic characteristics. Adv. Aeronaut. Sci. Eng. 2018, 9, 577–584+622. (In Chinese) [Google Scholar]
- Jin, W.; Lee, Y.G. Drag reduction design for a long-endurance electric powered UAV. Int. J. Aeronaut. Space. Sci. 2015, 16, 311–324. [Google Scholar] [CrossRef]
- Jia, Z.; Zhou, Z.; Zhuang, S. Design and Parameters Analysis of a Solar Powered UAV for Extended Endurance. Asia-Pac. Int. Symp. Aerosp. Technol. 2023, 1050, 1742–1750. [Google Scholar]
- Shashati, M.; Zeyoudi, S.A.; Khatib, O.A.; Hakim, A.; Aasim, W.F.A.W.; Okasha, M.; Dief, T.N. Design and Fabrication of a Solar Powered Unmanned Aerial Vehicle (UAV). In Proceedings of the 2023 Advances in Science and Engineering Technology International Conferences (ASET), Dubai, United Arab Emirates, 20–23 February 2023; pp. 1–10. [Google Scholar]
- Wang, Y.C.; Sun, K.W.; Liu, S.Y.; Tian, Y.L.; Liang, H.Q. Overall parameter design method and sensitivity analysis for solar aircraft. J. Phys. Conf. Ser. 2024, 2820, 012011. [Google Scholar] [CrossRef]
- İlhan, C.; Çalık, Z. Solar-powered UAV: A novel approach to conceptual design. Konya J. Eng. Sci. 2024, 12, 396–409. [Google Scholar] [CrossRef]
- Ni, W.J.; Bi, Y.; Wu, D.; Ma, X.P. Energy-optimal trajectory planning for solar-powered aircraft using soft actor-critic. Chin. J. Aeronaut. 2022, 35, 337–353. [Google Scholar] [CrossRef]
- Betz, A.; Prandtl, L. Schraubenpropeller mit geringstem energieverslust. Goettinger Na-Chrichten 1919, 3, 193–217. [Google Scholar]
- Traub, L.W. Considerations in Optimal Propeller Design. J. Aircr. 2021, 58, 950–957. [Google Scholar] [CrossRef]
- Harmats, M.; Weihs, D. Hybrid-Propulsion High-Altitude Long-Endurance Remotely Piloted Vehicle. J. Aircr. 1999, 36, 321–331. [Google Scholar] [CrossRef]
- Menéndez Arán, D.H.; Kinnas, S.A. On fully aligned lifting line model for propellers: An assessment of betz condition. J. Ship Res. 2014, 58, 130–145. [Google Scholar] [CrossRef]
- Kuitche, M.A.J.; Botez, R.M.; Viso, R.; Maunand, J.C.; Moyao, O.C. Blade element momentum new methodology and wind tunnel test performance evaluation for the UAS-S45 Bàlaam propeller. CEAS Aeronaut. J. 2020, 11, 937–953. [Google Scholar] [CrossRef]
- Mascarenhas, C.A.; Anderson, J.G.; Langford, J.S. Solar-powered aircraft-configuration design optimization based on propulsion system mass and efficiency characterization. In Proceedings of the AIAA AVIATION 2021 FORUM, Virtual Event, 2–6 August 2021; p. 2416. [Google Scholar]
- Second-Order DC Electric Motor Model. Available online: https://web.mit.edu/drela/Public/web/qprop/motor2_theory.pdf (accessed on 28 August 2024).
- Zhang, X.T. Research on High Efficiency and High Torque Density Permanent Magnet Synchronous Motor of Solar Unmanned Aerial Vehicle. Master Dissertation, Harbin Institute of Technology, Harbin, China, 2018. (In Chinese). [Google Scholar]
- Langtry, R.B. A Correlation-Based Transition Model Using Local Variables for Un-Structured Parallelized Cfd Codes. Ph.D. Dissertation, Universität Stuttgart, Stuttgart, Germany, 2006. [Google Scholar]
- Menter, F.R.; Langtry, R.B.; Likki, S.R.; Suzen, Y.B.; Huang, P.G.; Völker, S. A correlation-based transition model using local variables—Part i: Model formulation. J. Turbomach. 2006, 128, 413–422. [Google Scholar] [CrossRef]
- Langtry, R.B.; Menter, F.R.; Likki, S.R.; Suzen, Y.B.; Huang, P.G.; Völker, S. A correlation-based transition model using local variables—Part ii: Test cases and industrial applications. J. Turbomach. 2006, 128, 423–434. [Google Scholar] [CrossRef]
- Chen, L.L.; Guo, Z.; Deng, X.L.; Hou, Z.X. Aerodynamic performance and transition prediction of low-speed fixed-wing unmanned aerial vehicles in full configuration based on improved γ—Reθ model. Aerosp. Sci. Technol. 2020, 107, 106281. [Google Scholar] [CrossRef]
- Wang, K.L.; Zhou, Z.; Fan, Z.Y.; Guo, J.H. Aerodynamic design of tractor propeller for high-performance distributed electric propulsion aircraft. Chin. J. Aeronaut. 2021, 34, 20–35. [Google Scholar] [CrossRef]
- Turnock, S.R.; Phillips, A.B.; Banks, J.; Nicholls-Lee, R. Modelling tidal current turbine wakes using a coupled RANS-BEMT approach as a tool for analysing power capture of arrays of turbines. Ocean Eng. 2011, 38, 1300–1307. [Google Scholar] [CrossRef]
- Burton, T.; Jenkins, N.; Sharpe, D.; Bossanyi, E. Wind Energy Handbook, 1st ed.; John Wiley & Sons: New York, NY, USA, 2011. [Google Scholar]
- McKee, J.W.; Naeseth, R.L. Experimental Investigation of the Drag of Flat Plates and Cylinders in the Slipstream of a Hovering Rotor; NACA: Washington, DC, USA, 1958; Report No.: NACA-TN-4239. [Google Scholar]
- Li, H.D.; Liu, Y.L.; Li, D.C.; Bie, D.W.; Kan, Z. Ground Test and Numerical Simulation of Aerodynamic Interference of the Marsupial UAS. Aerospace 2023, 10, 175. [Google Scholar] [CrossRef]
- McKay, M.D.; Conover, W.J.; Beckman, R.J. Latin Hypercube Sampling: A Comparison of Three Methods for Selecting Values of Input Variables in the Analysis of Output from a Computer Code. Technometrics 1979, 21, 239–245. [Google Scholar]
- Rigoni, E.; Poles, S. NBI and MOGA-II, two complementary algorithms for Multi-Objective optimizations. In Dagstuhl Seminar Proceedings; Schloss Dagstuhl-Leibniz-Zentrum für Informatik: Wadern, Germany, 2005. [Google Scholar]
- Zhang, L.; Ma, D.L.; Yang, M.Q.; Xia, X.L.; Yao, Y. Optimization and analysis of composite sandwich box beam for solar drones. Chin. J. Aeronaut. 2021, 34, 148–165. [Google Scholar] [CrossRef]
- Dan Foresee, F.; Hagan, M.T. Gauss-Newton approximation to Bayesian learning. Proc. Int. Jt. Conf. Neural Netw. 1997, 3, 1930–1935. [Google Scholar]
- Aminaei, H.; Dehgan Manshadi, M.; Mostofizadeh, A.R. Experimental investigation of propeller slipstream effects on the wing aerodynamics and boundary layer treatment at low Reynolds number. Proc. Inst. Mech. Eng. Part G J. Aerosp. Eng. 2019, 233, 3033–3041. [Google Scholar] [CrossRef]
- Cornwell-Arquitt, L.A.; Curtis, C.G.; Albertani, R. Design, Manufacturing, and Testing of a Propeller for Solar-Powered Unmanned Aerial Vehicles. In Proceedings of the 2023 Regional Student Conferences, Multiple Locations, 1 January 2023; p. 72204. [Google Scholar]
- Pholdee, N.; Bureerat, S.; Nuantong, W.; Pongsatitpat, B. Kriging Surrogate-based Optimization for Shape Design of Thin Electric Propeller. J. Eng. Technol. Sci. 2024, 56, 404–413. [Google Scholar] [CrossRef]
- Ananda, G.K.; Selig, M.S.; Deters, R.W. Experiments of propeller-induced flow effects on a low-Reynolds-number wing. AIAA J. 2018, 56, 3279–3294. [Google Scholar] [CrossRef]
- Ikami, T.; Fujita, K.; Nagai, H. Low-Reynolds-number flowfield of wing with control surface in propeller slipstream. J. Aircr. 2021, 58, 228–235. [Google Scholar] [CrossRef]
- Shin, K.; Hwang, H.; Ahn, J. Mission analysis of solar UAV for high-altitude long-endurance flight. J. Aerosp. Eng. 2018, 31, 04018010. [Google Scholar] [CrossRef]
- Guo, Q.; Qiu, M.H.; Li, X.Q.; Sun, W.; Guo, Z.H. Integrated Design and Flight Validation of Solar-Powered Unmanned Aerial Vehicle (UAV) Structure and Propulsion System. Energies 2023, 16, 7110. [Google Scholar] [CrossRef]
- Hayal, M.R.; Elsayed, E.E.; Kakati, D.; Singh, M.; Elfikky, A.; Boghdady, A.I.; Grover, A.; Mehta, S.; Mohsan, S.A.H.; Nurhidayat, I. Modeling and investigation on the performance enhancement of hovering UAV-based FSO relay optical wireless communication systems under pointing errors and atmospheric turbulence effects. Opt. Quantum Electron. 2023, 55, 625. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Value | |
|---|---|---|
| aerodynamic parameters | wingspan | 30 m |
| wing area | 34.35 m2 | |
| cruising altitude | 16–23 km | |
| Reynolds number | 2 × 105–3 × 105 | |
| PV cells | conversion Efficiency | 28% |
| surface density | 0.4 kg/m2 | |
| secondary batteries | discharge depth | 90% |
| energy density | 350 Wh/kg |
| Traditional Method | New Method | |
|---|---|---|
| propeller diameter (m) | 1.68 | 1.43 |
| motor overload factor | 2.23 | 2.00 |
| secondary battery capacity (Wh) | 24,149 | 30,575 |
| PV coverage rate (%) | 65.2 | 80.0 |
| total weight of SPUAV (kg) | 131.49 | 152.42 |
| Aerodynamic Parameters of the SPUAV | Before Considering Slipstream | After Considering Slipstream |
|---|---|---|
| lift coefficient | 0.839 | 0.858 |
| drag coefficient | 0.0241 | 0.0267 |
| lift–drag ratio | 34.8 | 32.1 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yang, X.; Ma, D.; Zhang, L.; Li, F.; Guan, H.; Yu, Y. Mission-Based Design and Retrofit for Energy/Propulsion Systems of Solar-Powered UAVs: Integrating Propeller Slipstream Effects. Drones 2024, 8, 584. https://doi.org/10.3390/drones8100584
Yang X, Ma D, Zhang L, Li F, Guan H, Yu Y. Mission-Based Design and Retrofit for Energy/Propulsion Systems of Solar-Powered UAVs: Integrating Propeller Slipstream Effects. Drones. 2024; 8(10):584. https://doi.org/10.3390/drones8100584
Chicago/Turabian StyleYang, Xiaopeng, Dongli Ma, Liang Zhang, Feng Li, Hao Guan, and Yayun Yu. 2024. "Mission-Based Design and Retrofit for Energy/Propulsion Systems of Solar-Powered UAVs: Integrating Propeller Slipstream Effects" Drones 8, no. 10: 584. https://doi.org/10.3390/drones8100584
APA StyleYang, X., Ma, D., Zhang, L., Li, F., Guan, H., & Yu, Y. (2024). Mission-Based Design and Retrofit for Energy/Propulsion Systems of Solar-Powered UAVs: Integrating Propeller Slipstream Effects. Drones, 8(10), 584. https://doi.org/10.3390/drones8100584