
Active Disturbance Rejection Flight Control and Simulation of Unmanned Quad Tilt Rotor eVTOL Based on Adaptive Neural Network

Abstract
1. Introduction
2. Model Description and Analysis
2.1. Flight Dynamics Modeling
- (1)
- The aerodynamic model of blade is established by using the blade element theory.
- (2)
- The rotor-induced velocity is calculated using the Pitt–Peters dynamic inflow model [27].
- (3)
- The flapping motion of the rotor only considers the first-order flapping of the blade.
2.2. Manipulation Strategy Design
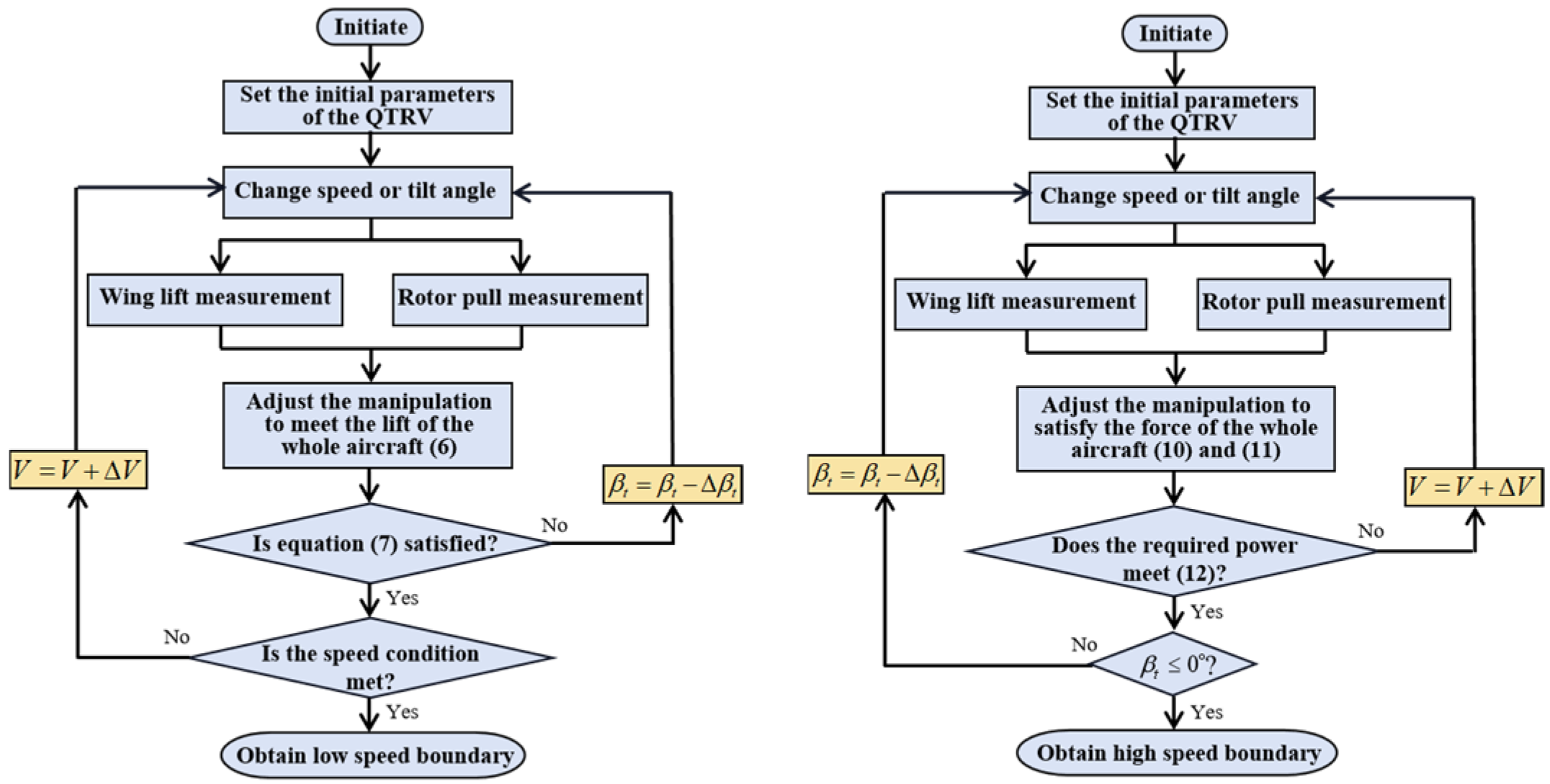
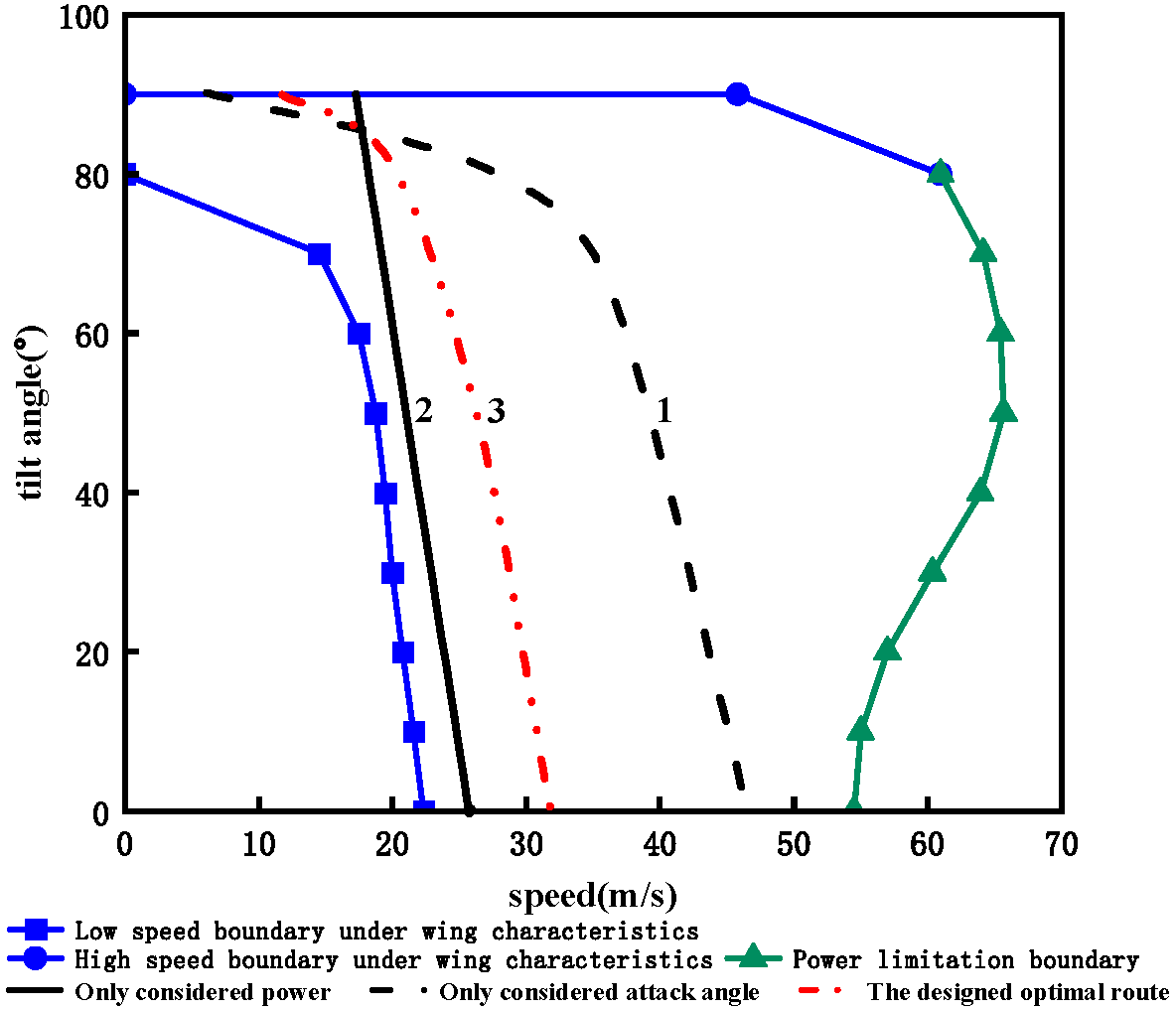
2.3. Tilt Corridor Measurement
2.3.1. Wing Lift Characteristics Limitation
2.3.2. Rotor Power Limitation
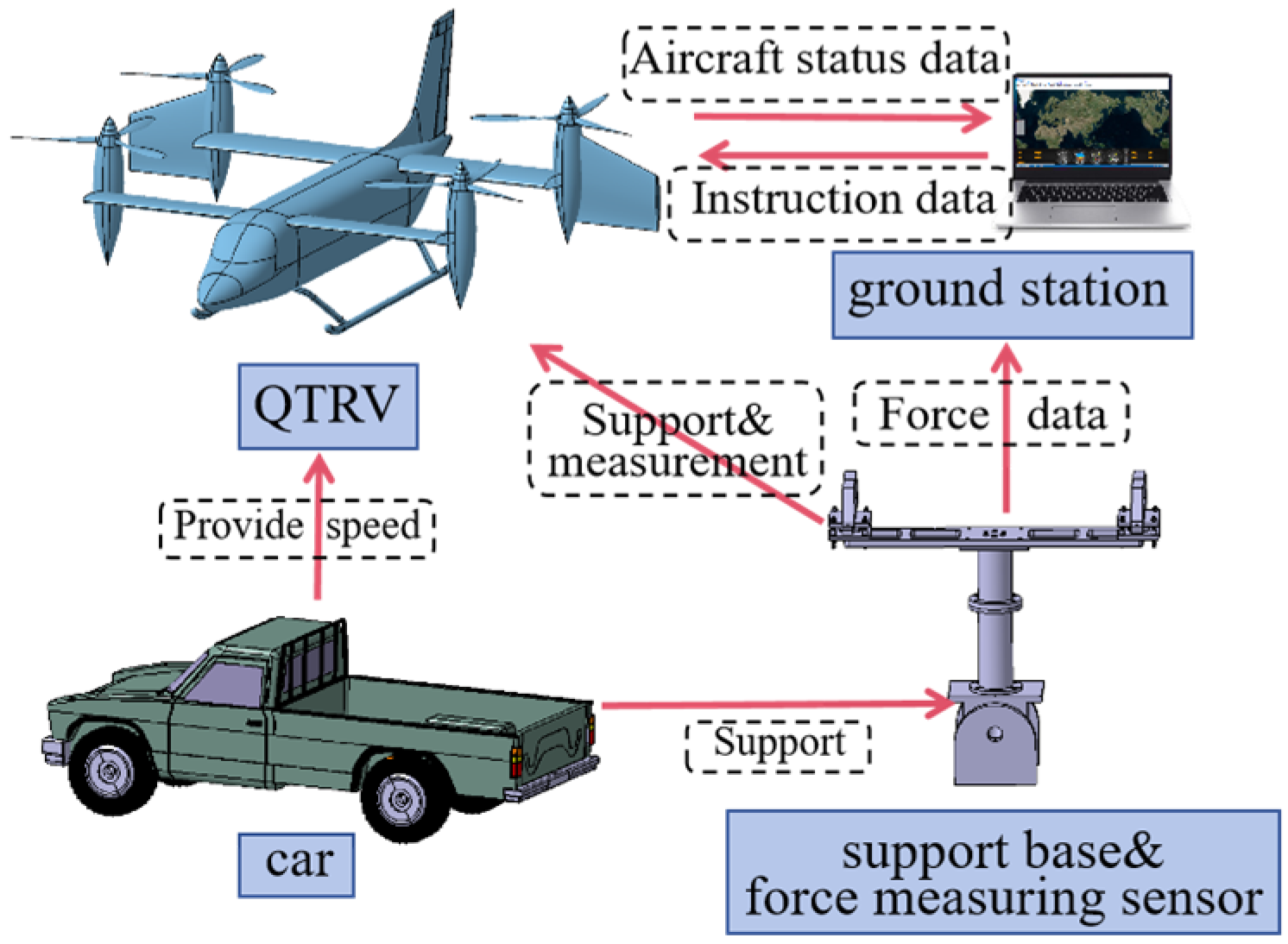
2.3.3. Vehicle-Mounted Running Test
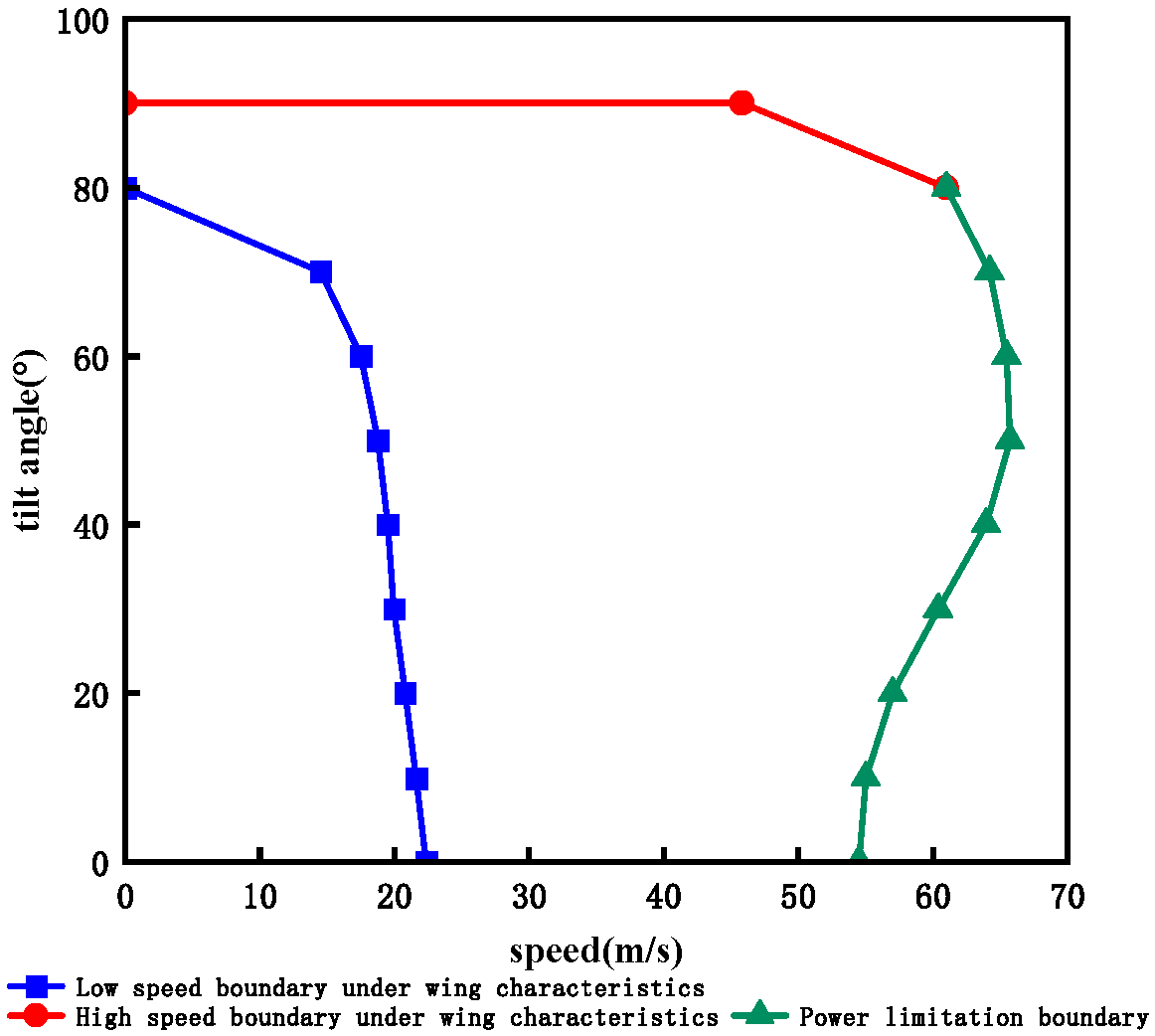
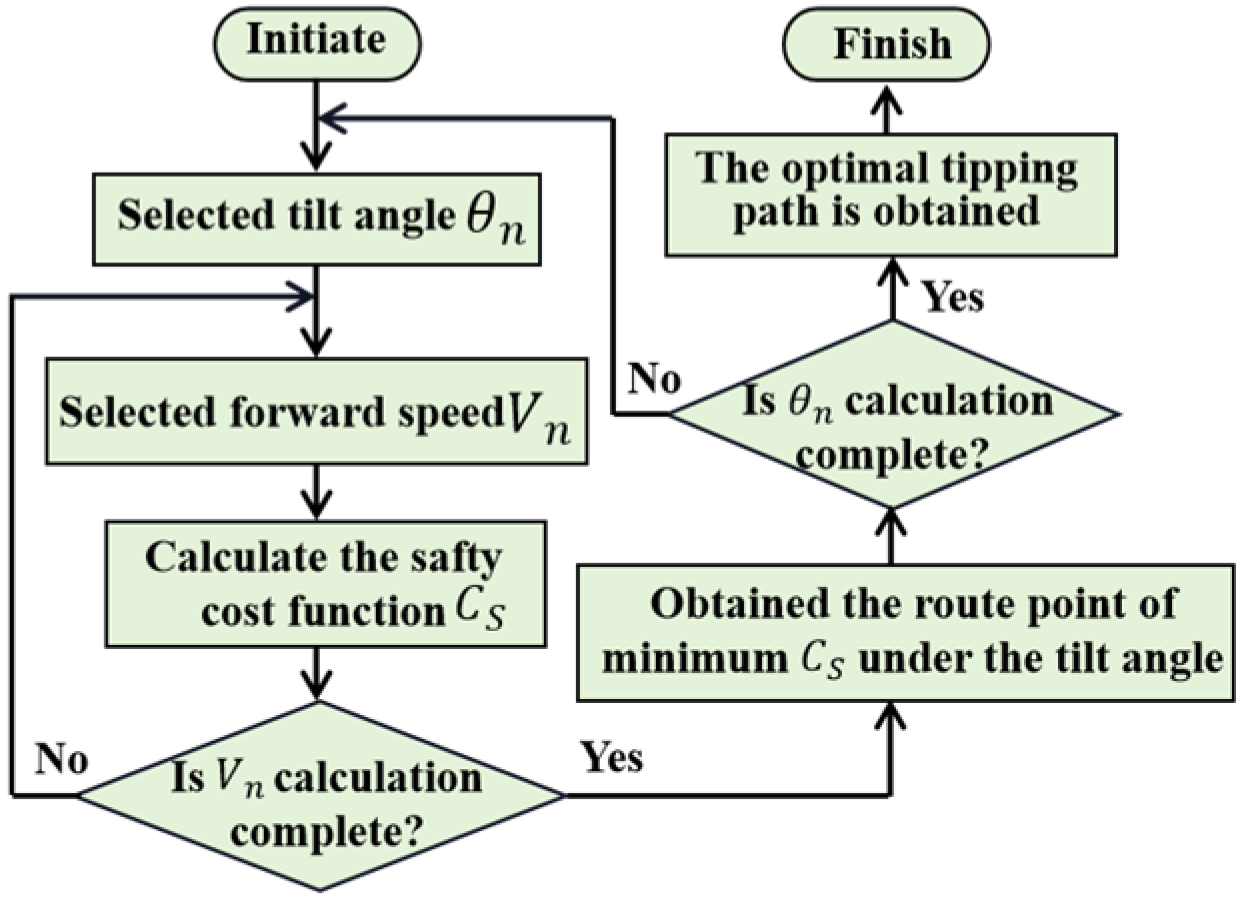
2.3.4. Tilt Route
3. Trajectory-Tracking Control Design
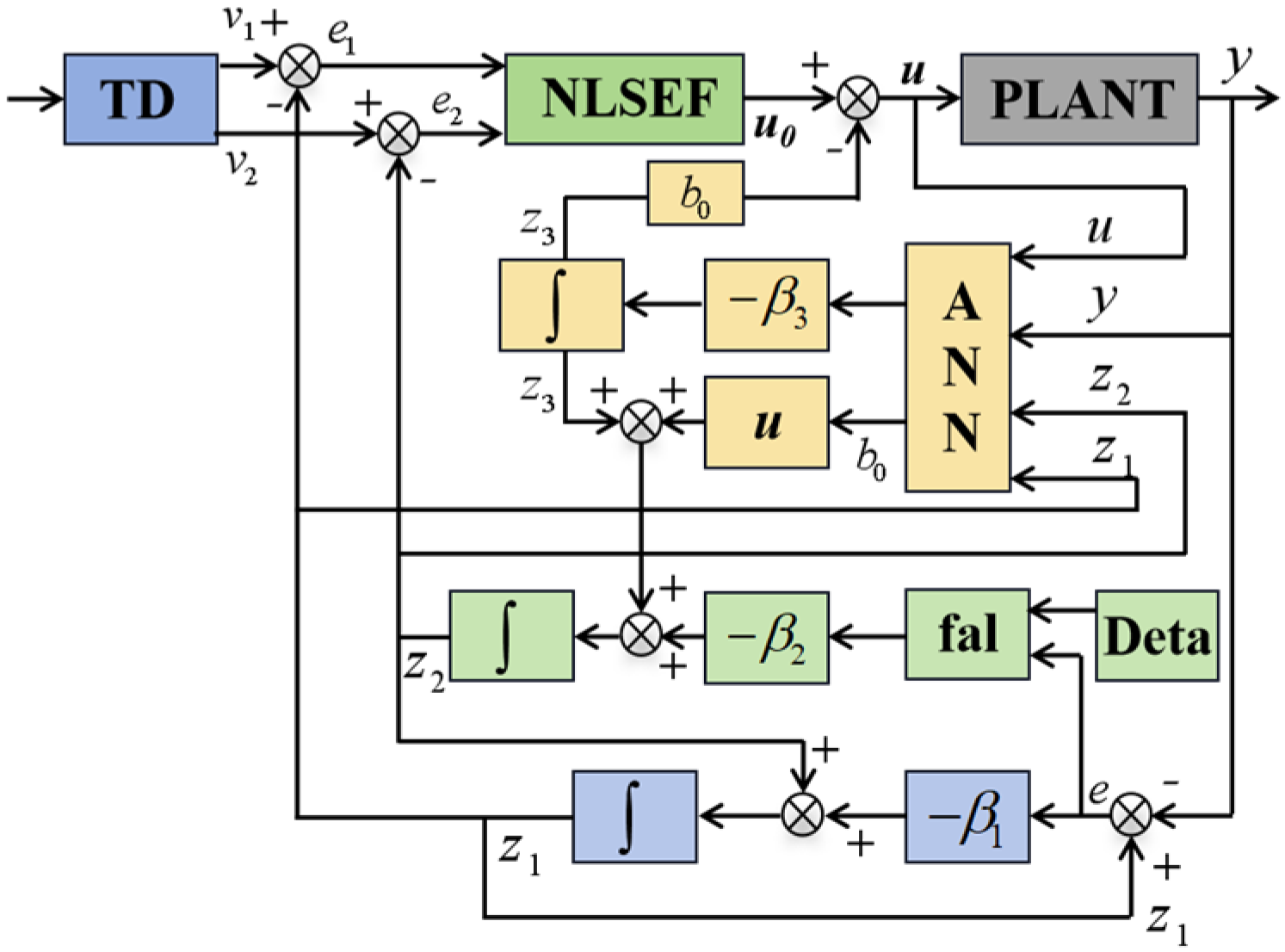
3.1. ANN-ADRC
3.1.1. TD
3.1.2. ANN-ESO
3.1.3. NLSEF
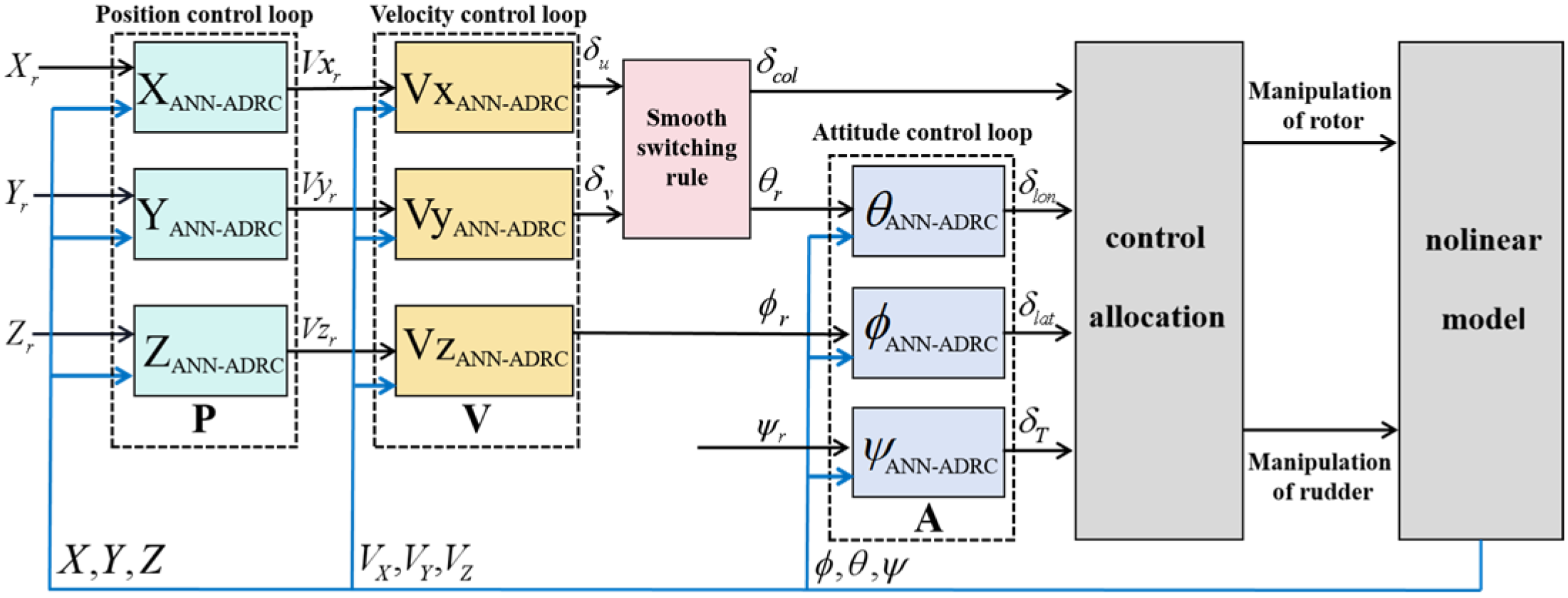
3.2. Trajectory-Tracking Control System
3.2.1. Attitude Control Loop
3.2.2. Velocity Control Loop
3.2.3. Position Control Loop
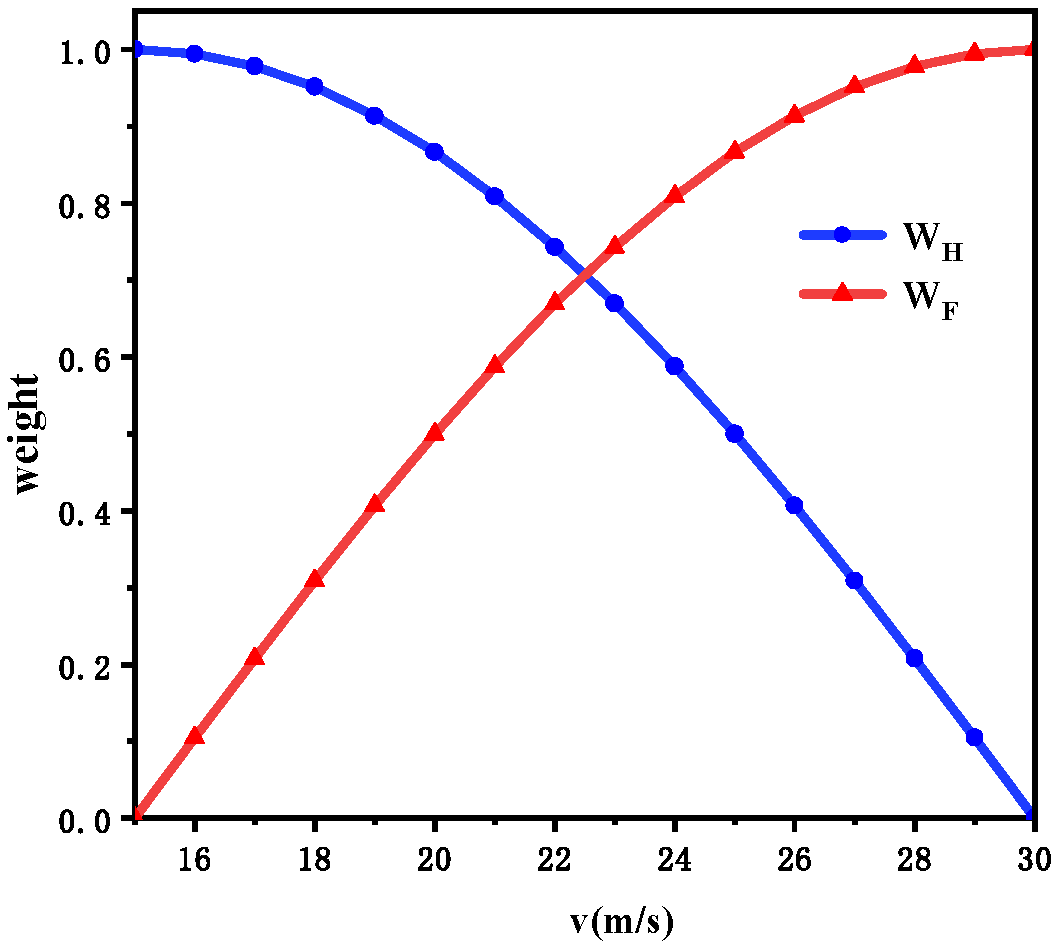
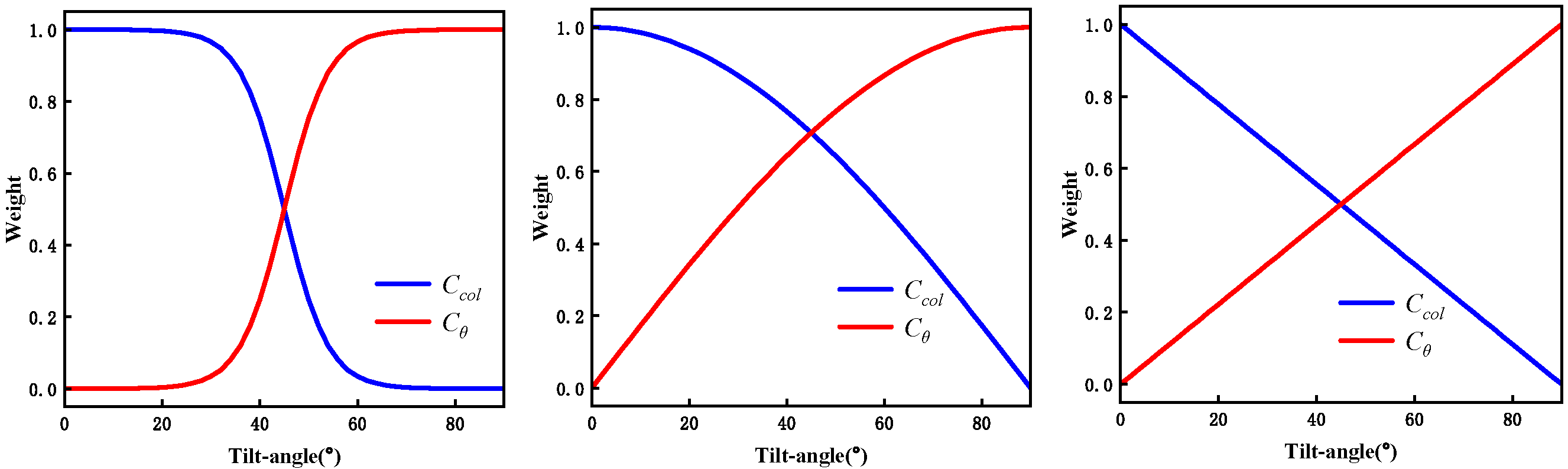
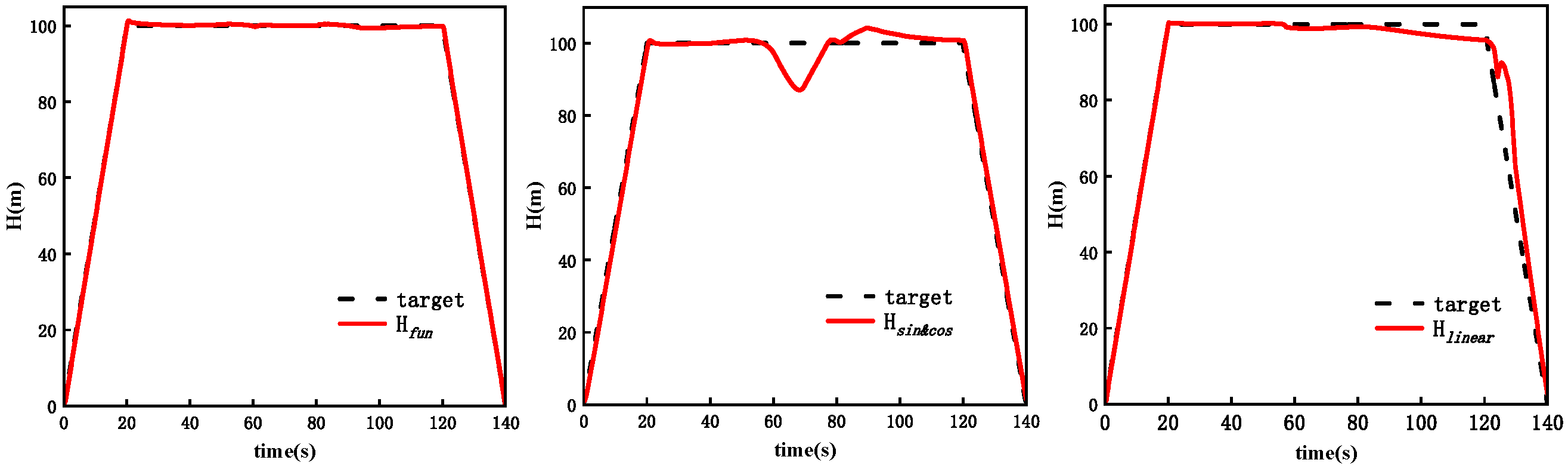
3.3. Collective Pitch–Pitch Angle Switching Rules
4. Hardware-in-the-Loop (HIL) Simulation
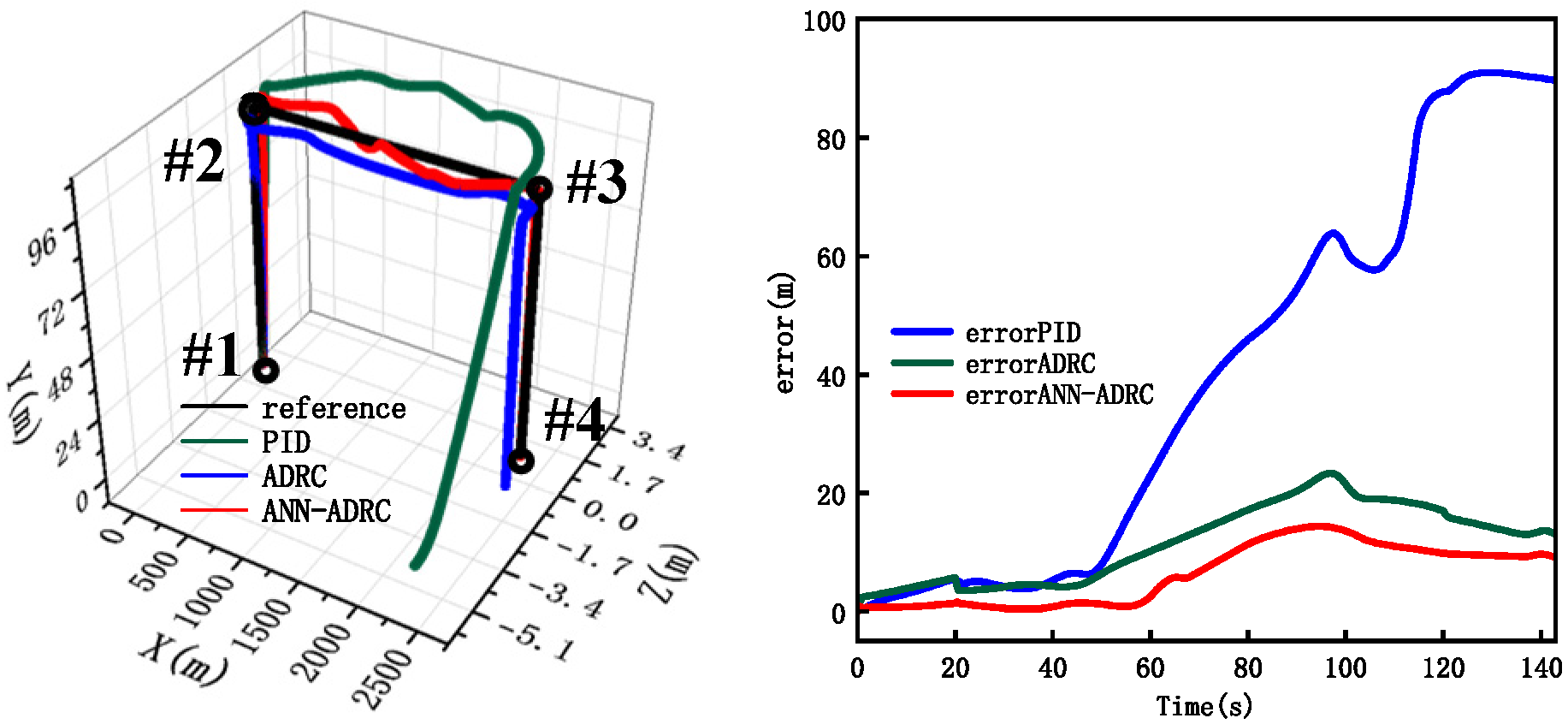
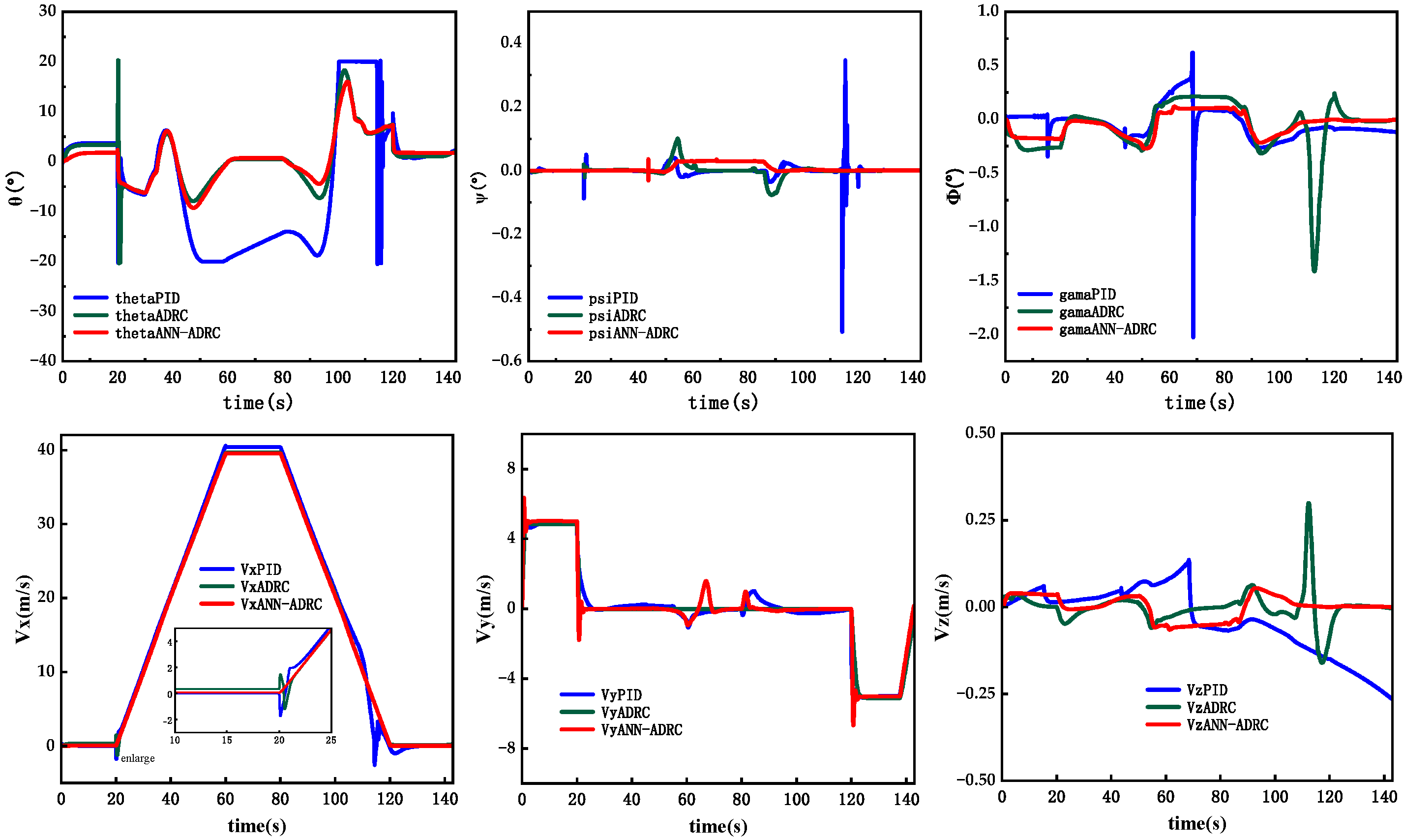
4.1. Stability and Robustness Simulation
4.2. Disturbance Rejection Simulation
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Liu, Z.; Didier, T.; Yang, L.; He, Y.; Han, J. Observer-based linear parameter varying control design with unmeasurable varying parameters under sensor faults for quad-tilt rotor unmanned aerial vehicle. Aerosp. Sci. Technol. 2019, 92, 696–713. [Google Scholar] [CrossRef]
- Metehan, Y.; Ali, T.K.; Murat, S.; Osman, G. An Adaptive Flight Controller Design for a Tilt-Prop Fixed Wing UAV for All Flight Modes. In AIAA Scitech 2020 Forum; Aerospace Research Central: Orlando, FL, USA, 2020; pp. 1–20. [Google Scholar]
- Yunus, G.; Sheikh MB, M.; Raunak, R.; Basman, E.; Erdal, K. Unsteady aerodynamic modeling and control of pusher and tilt-rotor quadplane configurations. Aerosp. Sci. Technol. 2019, 94, 105421. [Google Scholar]
- Ye, L.; Zhang, Y.; Yang, S.; Zhu, X.; Dong, J. Numerical simulation of aerodynamic interaction for a tilt rotor aircraft in helicopter mode. Chin. J. Aeronaut. 2016, 28, 843–854. [Google Scholar] [CrossRef]
- Chen, C.; Zhang, J.; Shen, L. Control and flight test of a tilt-rotor unmanned aerial vehicle. Int. J. Adv. Robot. Syst. 2017, 14, 1729881416678141. [Google Scholar] [CrossRef]
- Liu, Z.; He, Y.; Yang, L.; Han, J. Control techniques of tilt rotor unmanned aerial vehicle systems: A review. Chin. J. Aeronaut. 2017, 30, 135–148. [Google Scholar] [CrossRef]
- Daniel NCardoso Sergio, E.; Guilherme, V.R. A new robust adaptive mixing control for trajectory tracking with improved forward flight of a tilt-rotor UAV. ISA Trans. 2021, 110, 86–104. [Google Scholar]
- Lv, Z.Y.; Wu, Y.; Zhao, Q.; Sun, X.M. Design and Control of a Novel Coaxial Tilt-Rotor UAV. IEEE Trans. Ind. Electron. 2022, 69, 3810–3821. [Google Scholar] [CrossRef]
- Navya, T.H.; George, V.I.; Gurudas, N.C. Modelling and Transition flight control of Vertical Take-Off and Landing unmanned Tri-Tilting Rotor Aerial Vehicle. In Proceedings of the ICECA, Coimbatore, India, 12–14 June 2019. [Google Scholar]
- Dharmawan, A.; Ashari, A.; Putra, A.E. Translation movement stability control of quad tiltrotor using LQR and LQG. I. J. Intell. Syst. Appl. 2018, 10, 10–21. [Google Scholar] [CrossRef]
- Prach, A.; Kayacan, E. An MPC-based position controller for a tilt-rotor tricopter VTOL UAV. Optim. Control. Appl. Methods 2018, 39, 343–356. [Google Scholar] [CrossRef]
- Flores-Colunga, G.R.; Lozano-Leal, R. A Nonlinear Control Law for Hover to Level Flight for the Quad Tilt-rotor UAV. IFAC Proc. Vol. 2016, 47, 11055–11059. [Google Scholar] [CrossRef]
- Almeida, M.M.; Raffo, G.V. Nonlinear Control of a TiltRotor UAV for Load Transportation. IFAC-Pap. 2015, 48, 232–237. [Google Scholar]
- Di, F.G.; Mattei, M. Modeling and Incremental Nonlinear Dynamic Inversion Control of a Novel Unmanned Tiltrotor. J. Aircr. 2016, 53, 73–85. [Google Scholar]
- Wang, X.; Cai, L. Mathematical Modeling and Control of a Tilt-Rotor Aircraft. Aerosp. Sci. Technol. 2015, 47, 473–492. [Google Scholar] [CrossRef]
- Bauersfeld, L.; Spannagl, L.; Ducard, G.J.; Onder, C.H. MPC Flight Control for a Tilt-Rotor VTOL Aircraft. IEEE Trans. Aerosp. Electron. Syst. 2021, 57, 2395–2409. [Google Scholar] [CrossRef]
- Nogar, S.M.; Kroninger, C.M. Development of a Hybrid Micro Air Vehicle Capable of Controlled Transition. IEEE Robot. Autom. Lett. 2018, 3, 2269–2276. [Google Scholar] [CrossRef]
- Zhang, Q.; Zhang, J.; Wang, X.; Xu, Y.; Yu, Z. Wind Field Disturbance Analysis and Flight Control System Design for a Novel Tilt-Rotor UAV. IEEE Access 2020, 8, 211401–211410. [Google Scholar] [CrossRef]
- Yin, Y.; Niu, H. Adaptive Neural Network Sliding Mode Control for Quad Tilt Rotor Aircraft. Complexity 2017, 2017, 7104708. [Google Scholar] [CrossRef]
- Sridhar, S.; Kumar, R.; Gupta, G.; Kumar, M.; Cohen, K. Nonlinear control of a novel class of tilt-rotor quadcopters using sliding mode method: Theory and hardware implementation. J. Aerosp. Eng. 2022, 35, 211401–211410. [Google Scholar] [CrossRef]
- He, G.; Yu, L.; Huang, H.; Wang, X. A Nonlinear Robust Sliding Mode Controller with Auxiliary Dynamic System for the Hovering Flight of a Tilt Tri-Rotor UAV. Appl. Sci. 2020, 10, 6551. [Google Scholar] [CrossRef]
- Li, D.; Zhang, L.; Mo, C.; Cui, N. Application of Improved Appointed Time Control in Helicopter Mode of a Tilt-rotor eVTOL Aircraft. Aerosp. Sci. Technol. 2024, 153, 109447. [Google Scholar] [CrossRef]
- Han, J. From PID to Active Disturbance Rejection Control. IEEE Trans. Ind. Electron. 2009, 56, 900–906. [Google Scholar] [CrossRef]
- Deng, B.; Xu, J. Trajectory Tracking Based on Active Disturbance Rejection Control for Compound Unmanned Aircraft. Aerospace 2022, 9, 313. [Google Scholar] [CrossRef]
- Su, B.; Zhang, F.; Huang, P. Stability Analysis and RBF Neural Network Control of Second-Order Nonlinear Satellite System. IEEE Trans. Aerosp. Electron. Syst. 2022, 59, 4575–4589. [Google Scholar] [CrossRef]
- Xia, R.; Chen, M.; Wu, Q.; Wang, Y. Neural network based integral sliding mode optimal flight control of near space hypersonic vehicle. Aerosp. Sci. Technol. 2020, 379, 41–52. [Google Scholar] [CrossRef]
- Gaonkar, G.; Peters, D. Review of Dynamic Inflow Modelling for Rotorcraft Flight Dynamics. In Proceedings of the 27th Structures, Structural Dynamics and Materials Conference, San Antonio, TX, USA, 19–21 May 1986. [Google Scholar]
- Ronan, B. Numerical analysis of rotor/propeller aerodynamic interactions on a high-speed compound helicopter. J. Am. Helicopter Soc. 2022, 67, 1–15. [Google Scholar]
- Simmons, B.M.; Gresham, J.L.; Woolsey, C.A. Aero-Propulsive Modeling for Propeller Aircraft Using Flight Data. J. Aircr. 2022, 60, 81–96. [Google Scholar] [CrossRef]
- Kumar, A.; Ben-Tzvi, P. Estimation of Wind Conditions Utilizing RC Helicopter Dynamics. IEEE/ASME Trans. Mechatron. 2019, 24, 2293–2303. [Google Scholar] [CrossRef]
- Han, J. Active Disturbance Rejection Controller. In Active Disturbance Rejection Control Technique-Control Technique for Estimating and Compensating Uncertain Factors, 5th ed.; National Defense Industry Press: Beijing, China, 2008; pp. 255–262. [Google Scholar]
- Gao, Z. Active disturbance rejection control: A paradigm shift in feedback control system design. In Proceedings of the 2006 American Control Conference, Minneapolis, MN, USA, 14–16 June 2006. [Google Scholar]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value | Parameter | Value |
|---|---|---|---|
| Weight/kg | 120 | Rotor radius/m | 0.7 |
| Rotor speed/rpm | 1600 | Rotor solidity | 0.075 |
| Number of rotor blades | 3 | Front wingspan/m | 2.0 |
| Average chord length of wing/m | 0.45 | Rear wingspan/m | 3.0 |
| Flight Modes | Helicopter | Fixed-Wing |
|---|---|---|
| Heading channel | Longitudinal cyclic pitch differential | Rudder |
| Lateral channel | Left and right rotor collective pitch differential | Left and right aileron differential |
| Longitudinal channel | Front and rear rotor collective pitch differential | Front and rear aileron differential |
| Vertical channel | Rotor collective pitch linkage | Front and rear ailerons and rotor collective pitch linkage |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Deng, B.; Xu, J.; Yuan, X.; Yu, S. Active Disturbance Rejection Flight Control and Simulation of Unmanned Quad Tilt Rotor eVTOL Based on Adaptive Neural Network. Drones 2024, 8, 560. https://doi.org/10.3390/drones8100560
Deng B, Xu J, Yuan X, Yu S. Active Disturbance Rejection Flight Control and Simulation of Unmanned Quad Tilt Rotor eVTOL Based on Adaptive Neural Network. Drones. 2024; 8(10):560. https://doi.org/10.3390/drones8100560
Chicago/Turabian StyleDeng, Bohai, Jinfa Xu, Xingyu Yuan, and Shengxin Yu. 2024. "Active Disturbance Rejection Flight Control and Simulation of Unmanned Quad Tilt Rotor eVTOL Based on Adaptive Neural Network" Drones 8, no. 10: 560. https://doi.org/10.3390/drones8100560
APA StyleDeng, B., Xu, J., Yuan, X., & Yu, S. (2024). Active Disturbance Rejection Flight Control and Simulation of Unmanned Quad Tilt Rotor eVTOL Based on Adaptive Neural Network. Drones, 8(10), 560. https://doi.org/10.3390/drones8100560