

EF-TTOA: Development of a UAV Path Planner and Obstacle Avoidance Control Framework for Static and Moving Obstacles



Abstract
:1. Introduction
- (1)
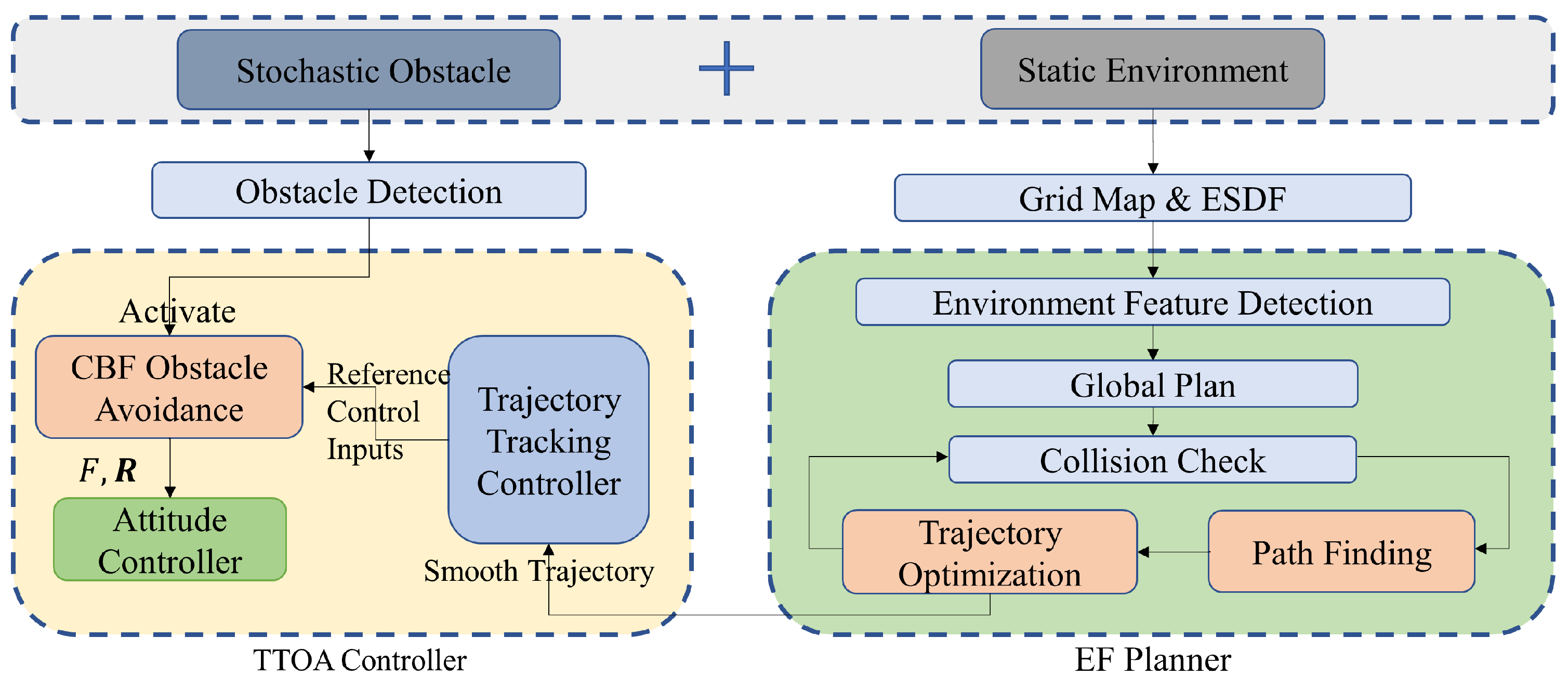
- EF planner
- (2)
- TTOA controller
- (3)
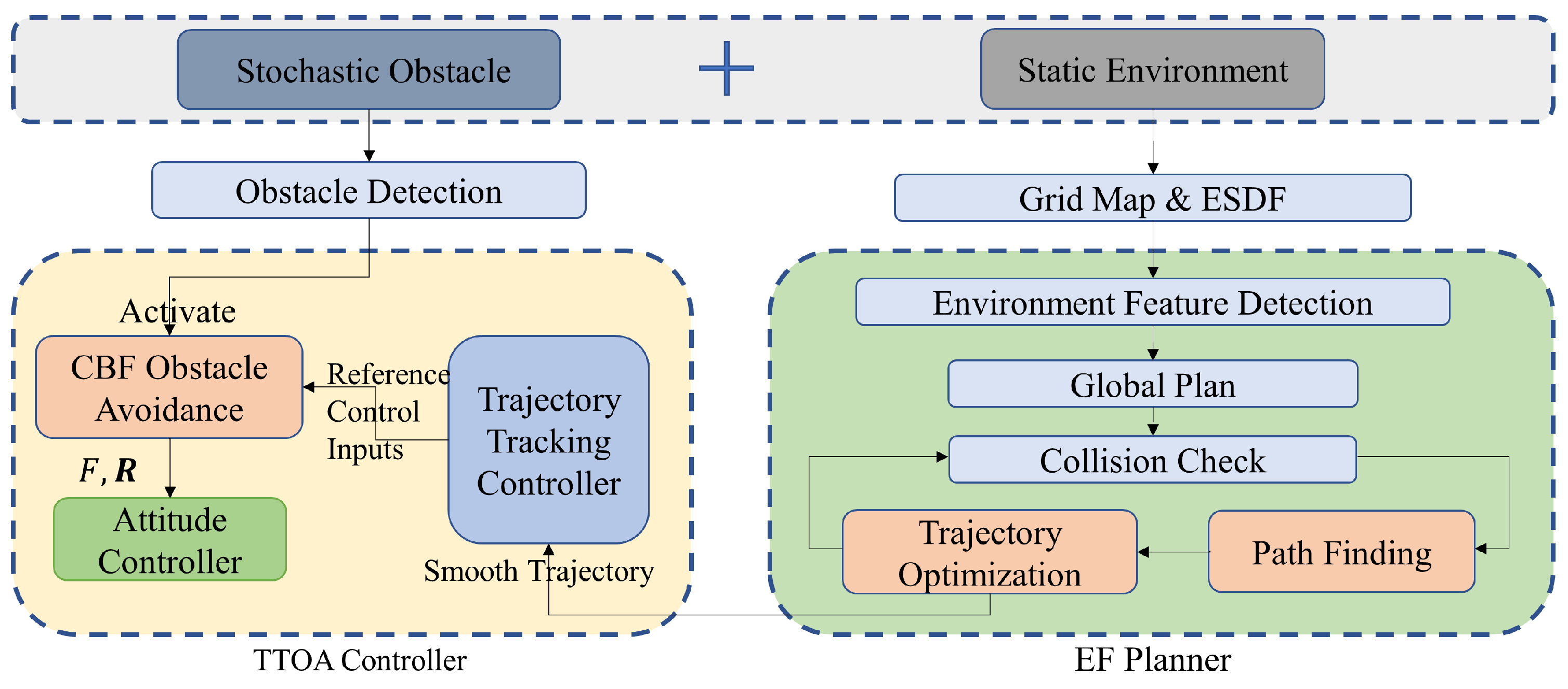
- EF-TTOA framework for a common environment
2. Methods
2.1. EF Planner
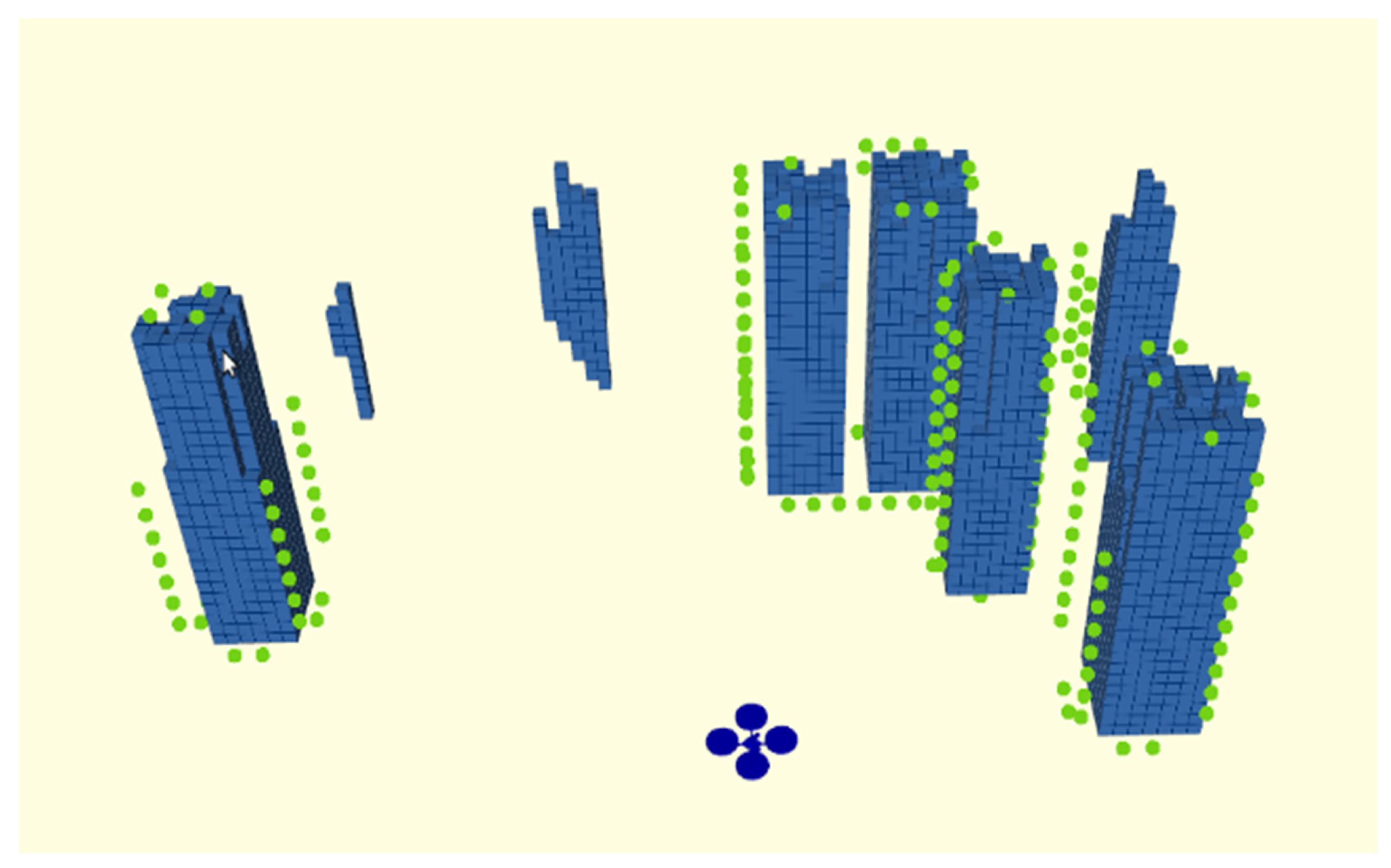
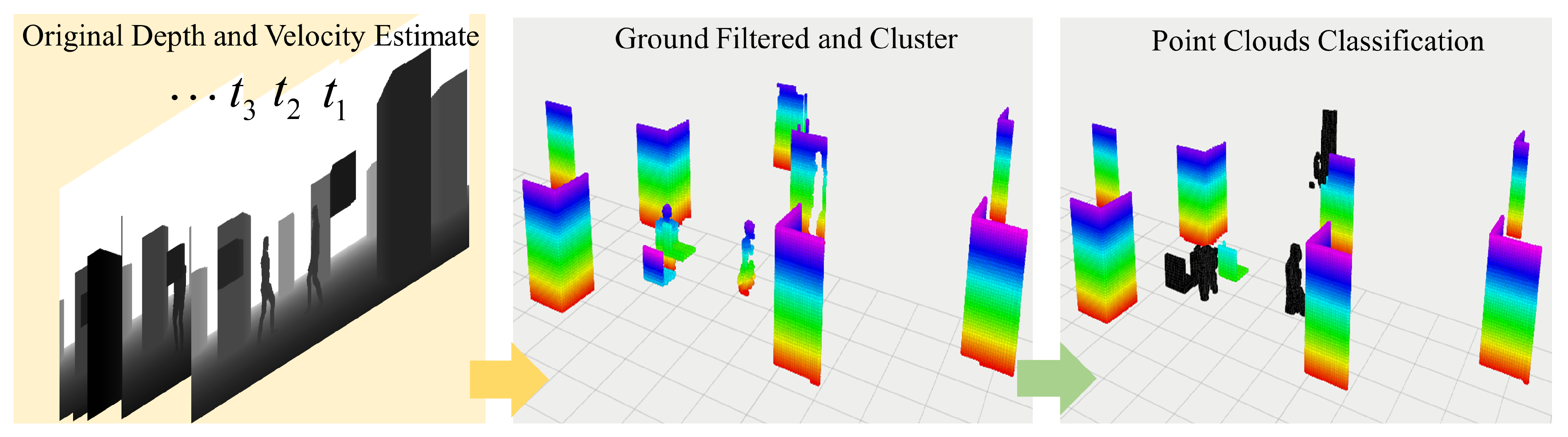
2.1.1. Environment Feature Detection
| Algorithm 1 Environment feature detection |
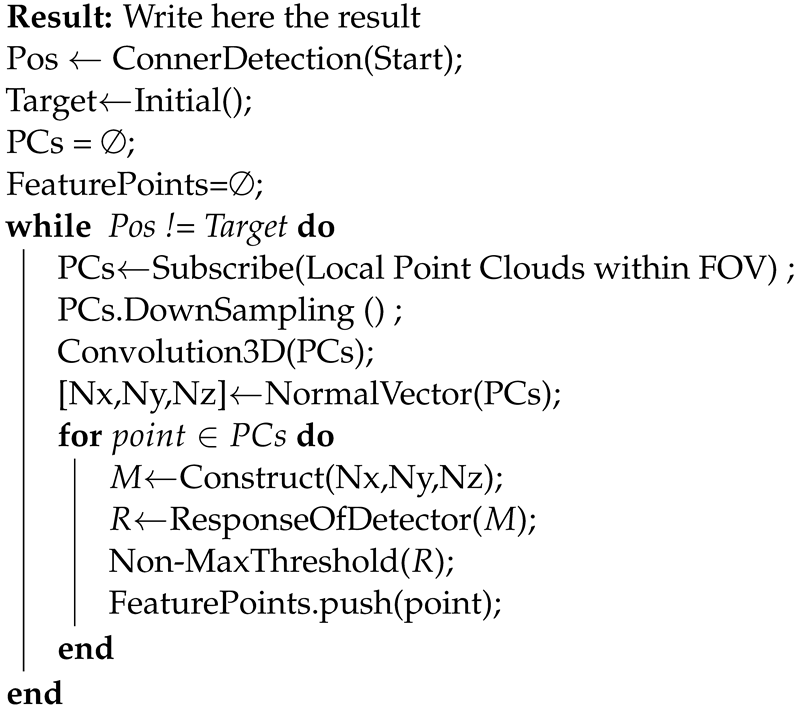 |
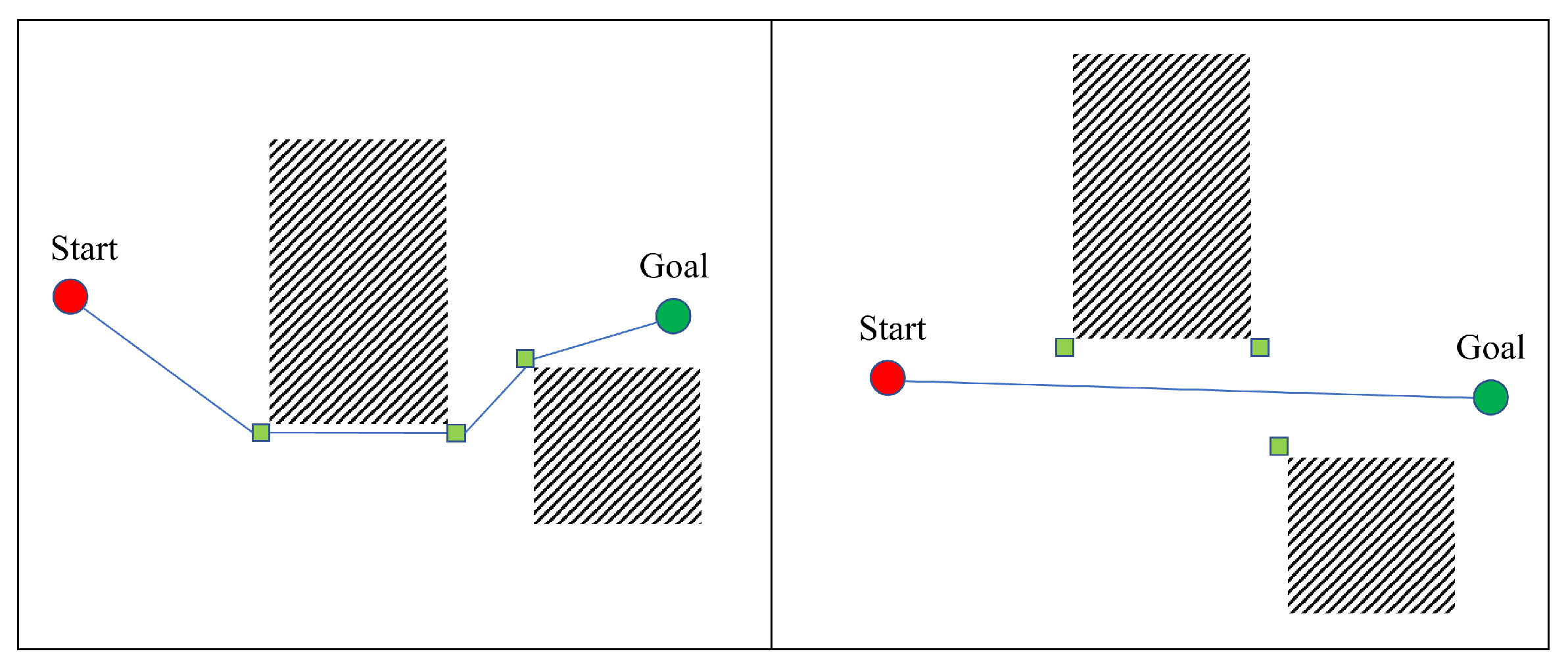
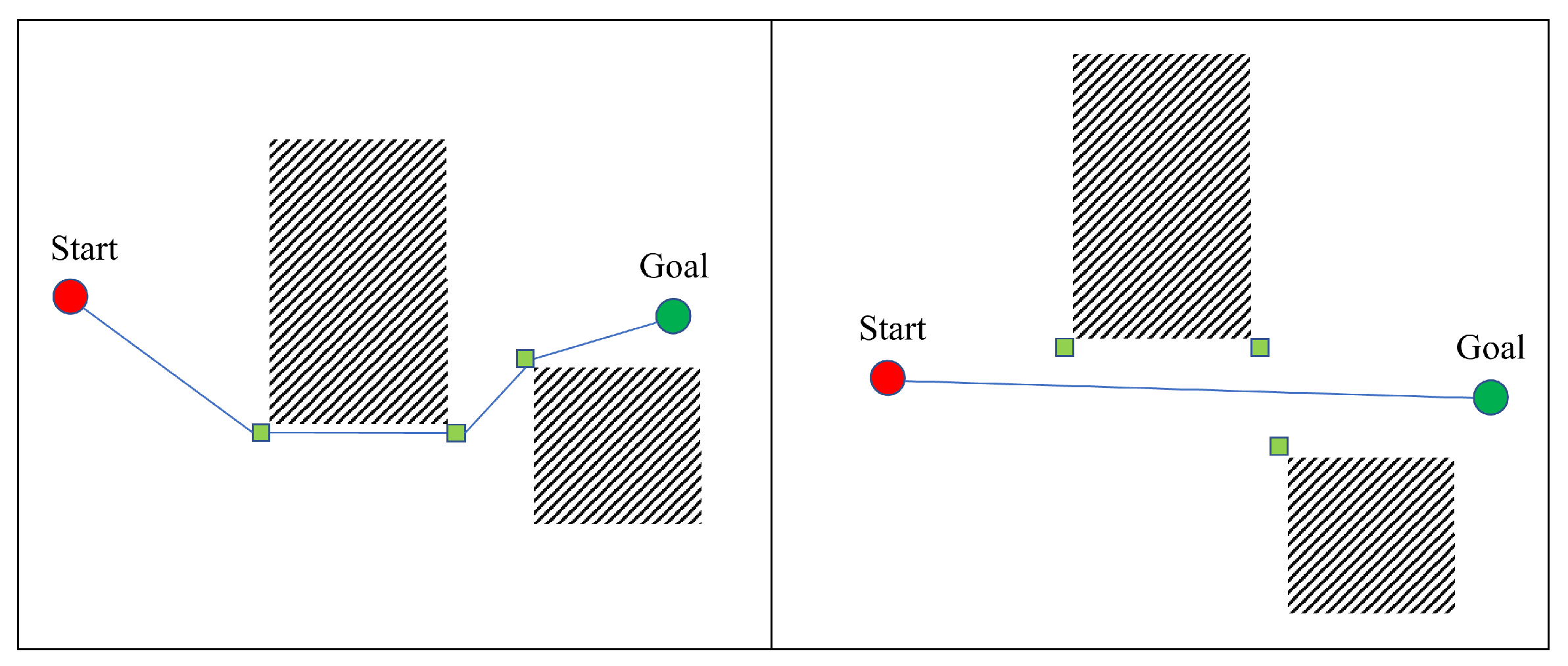
2.1.2. Path Planning
| Algorithm 2 Path finding |
 |
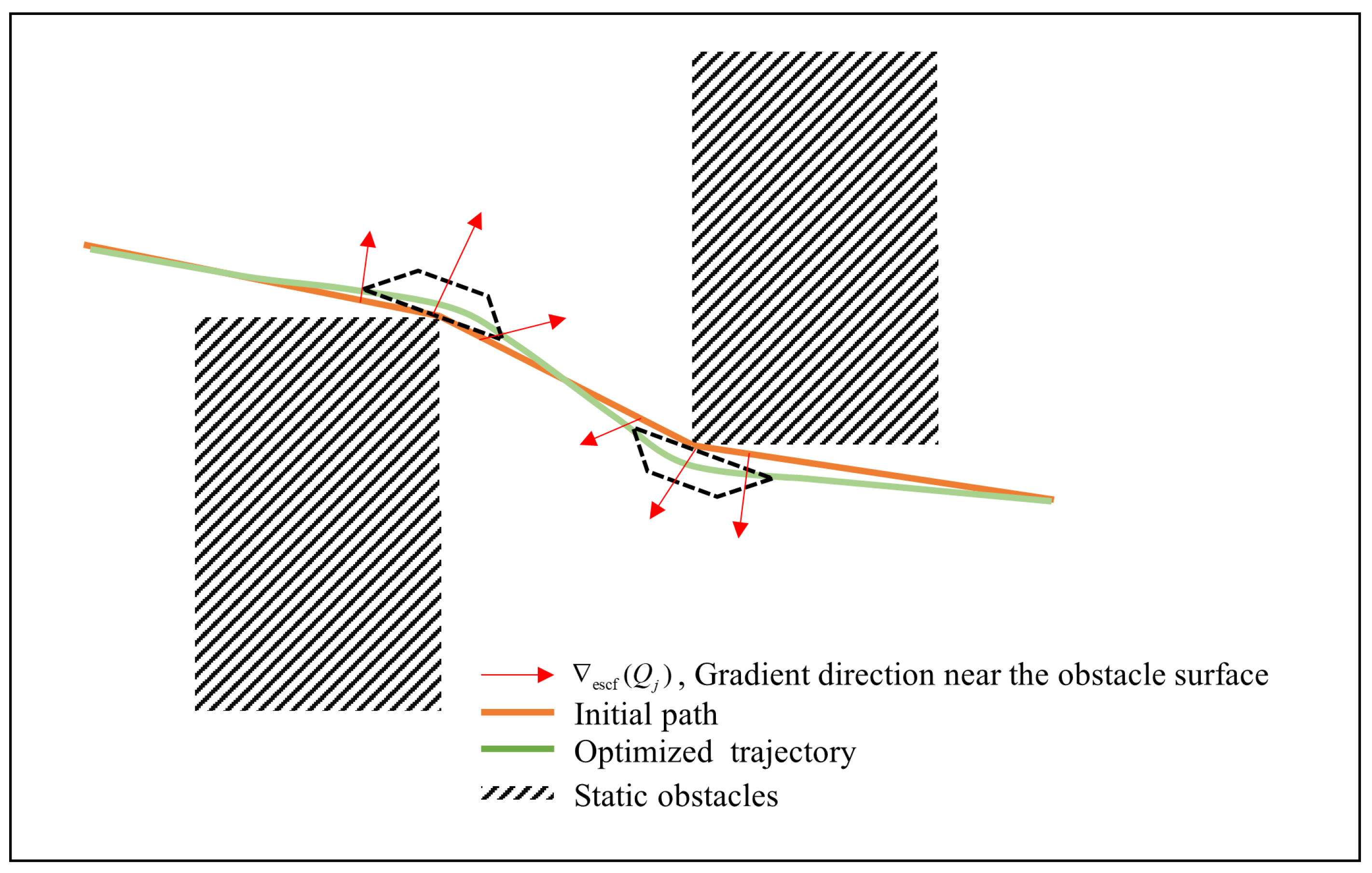
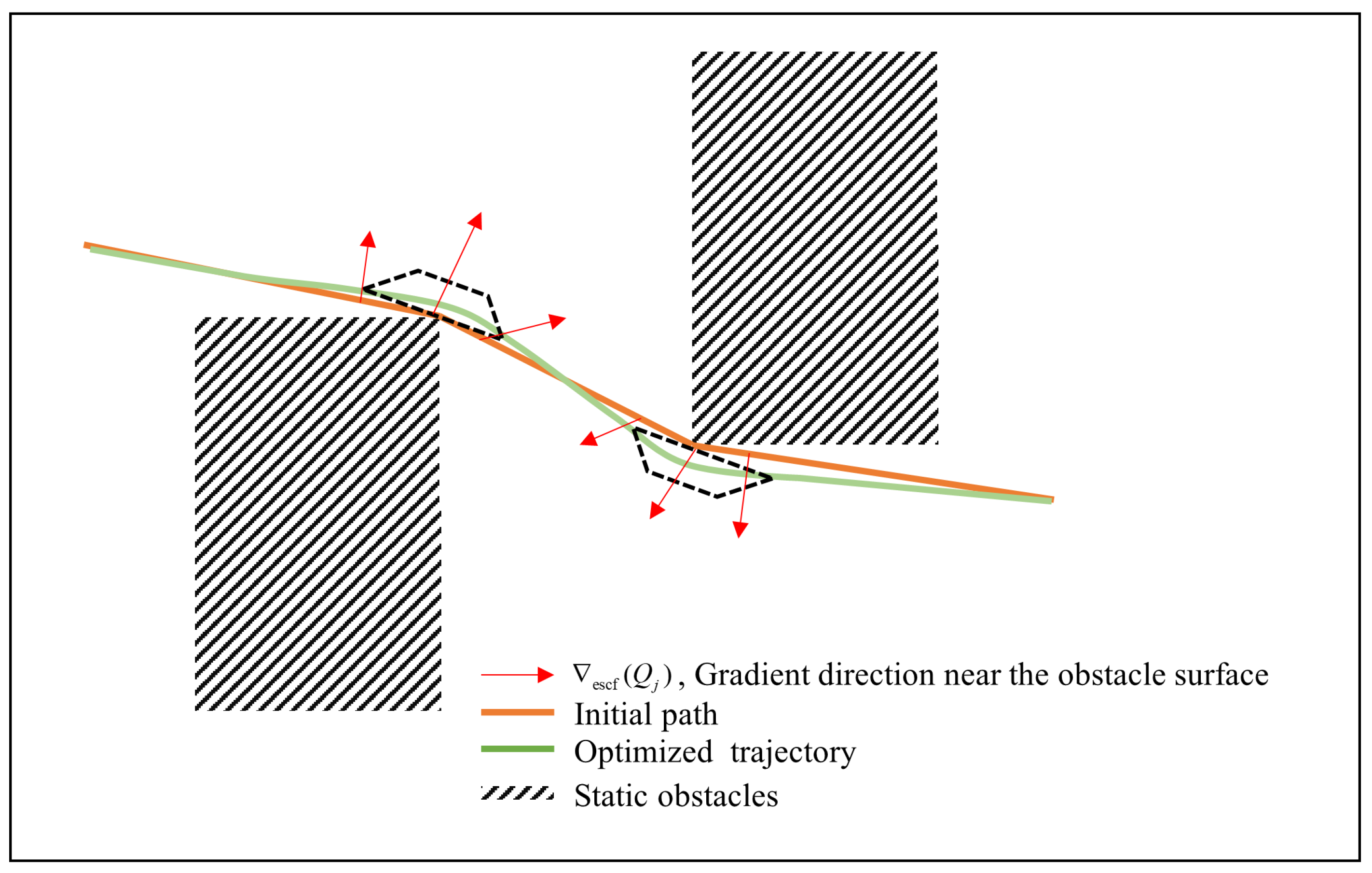
2.1.3. Trajectory Generation and Optimization
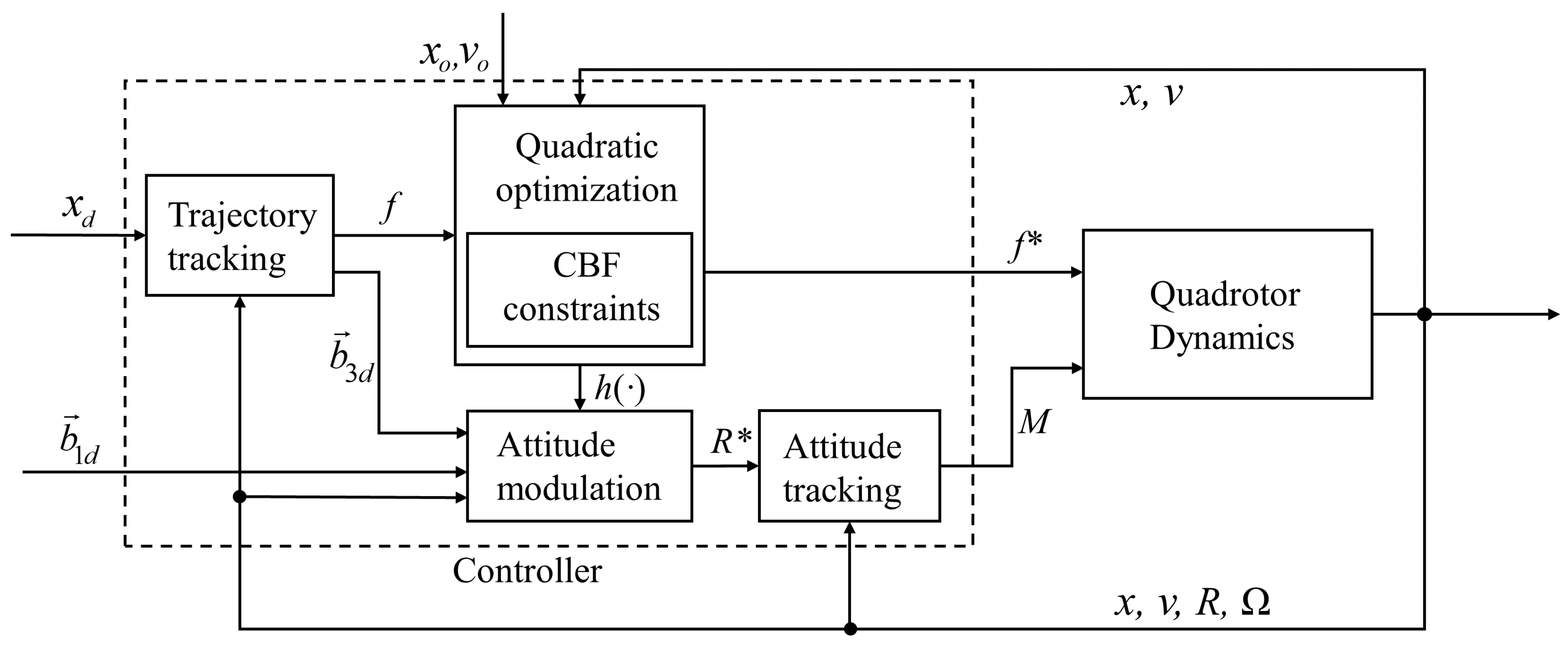
2.2. TTOA Controller
2.2.1. Control Barrier Function
2.2.2. TTOA Controller Design
3. Simulation and Discussion
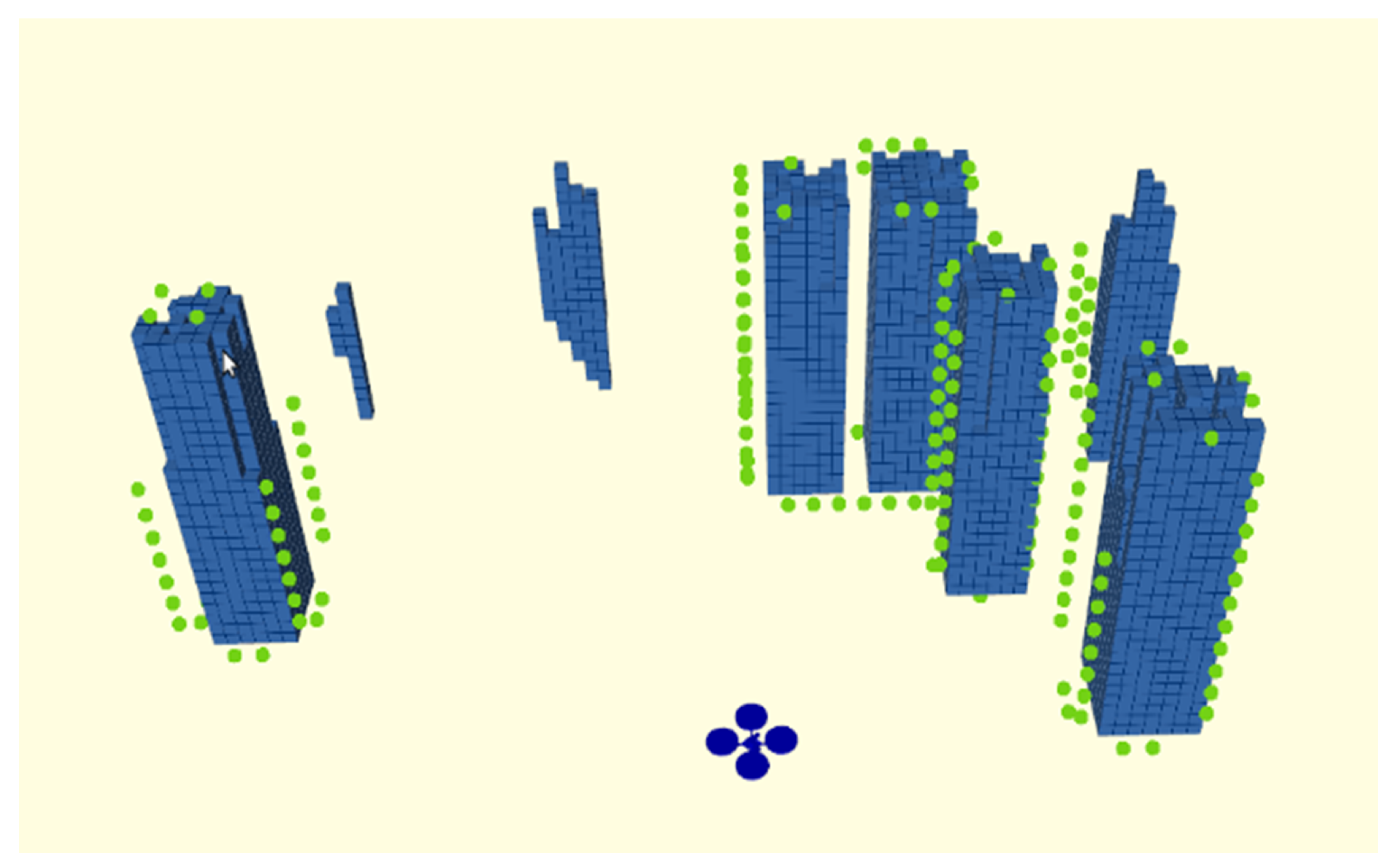
3.1. Simulation of the EF Planner with a Static Environment
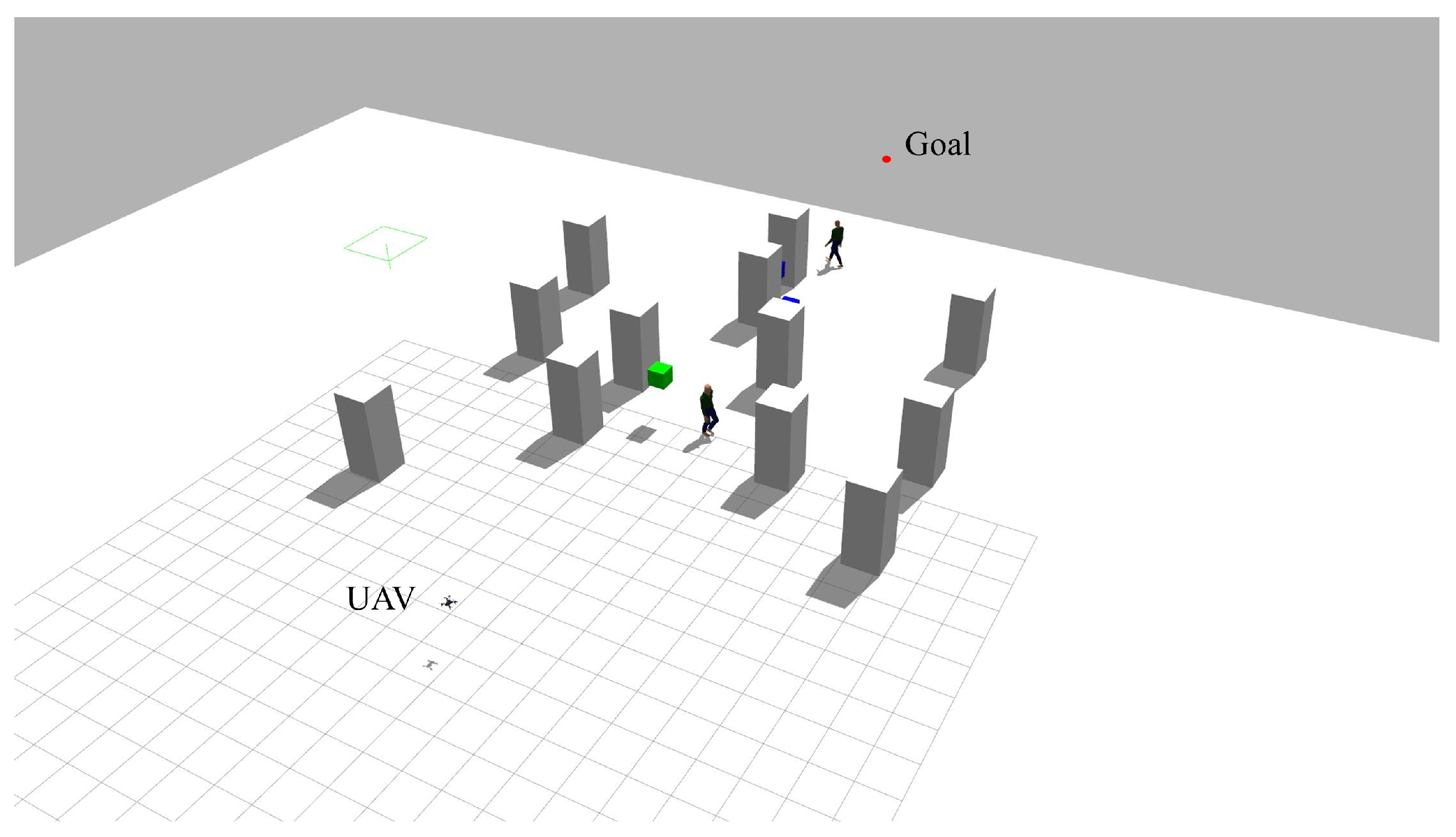
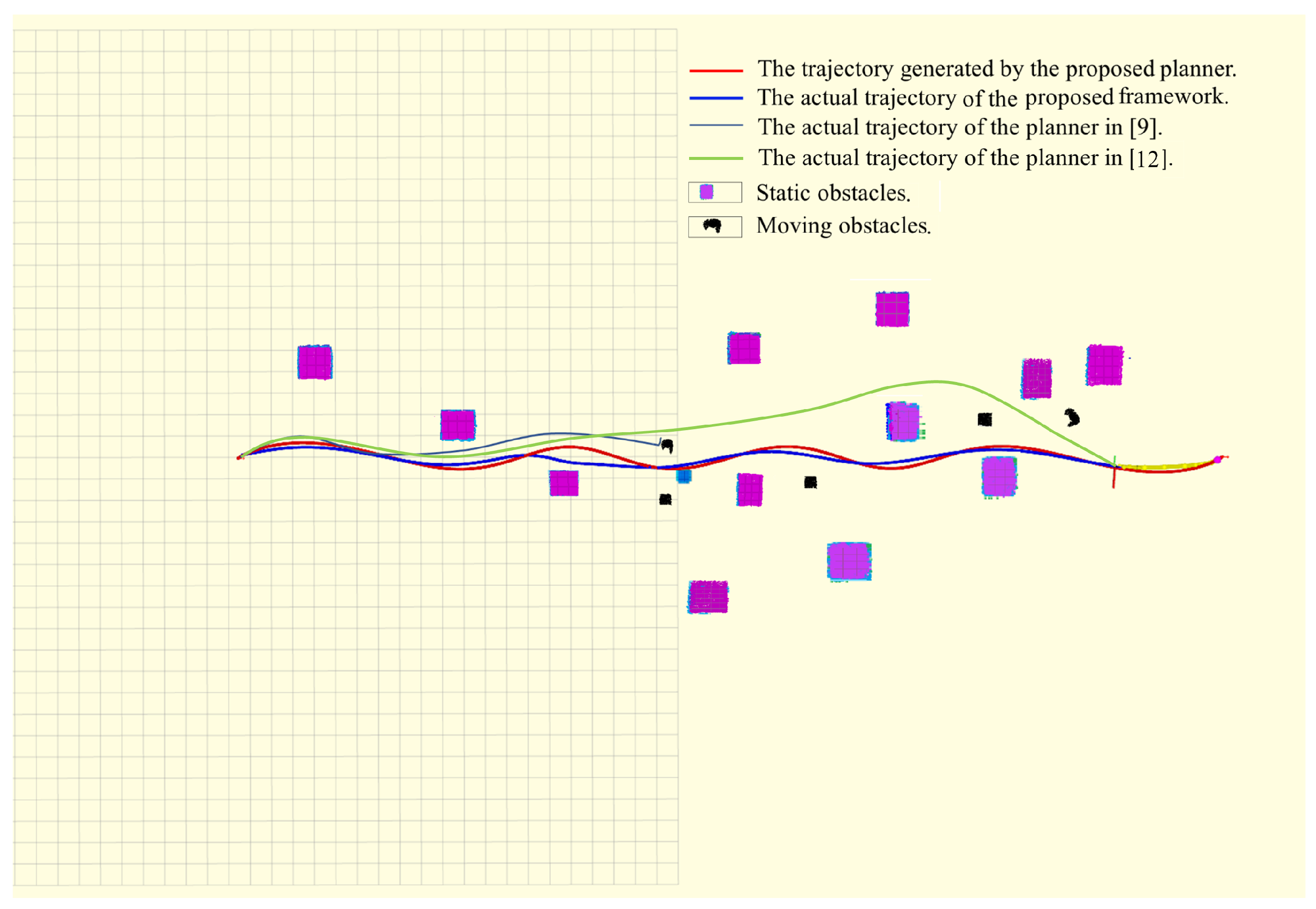
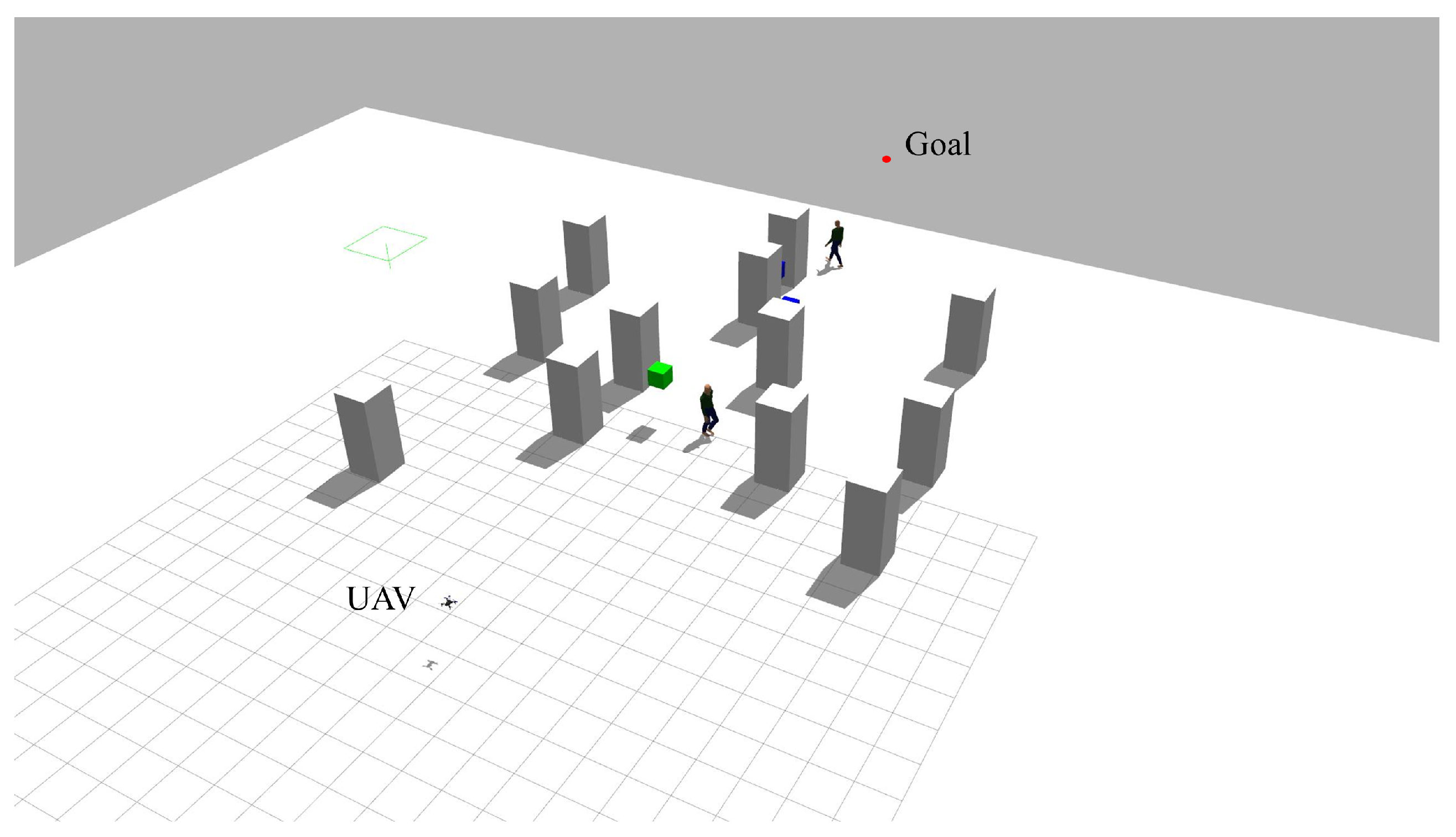
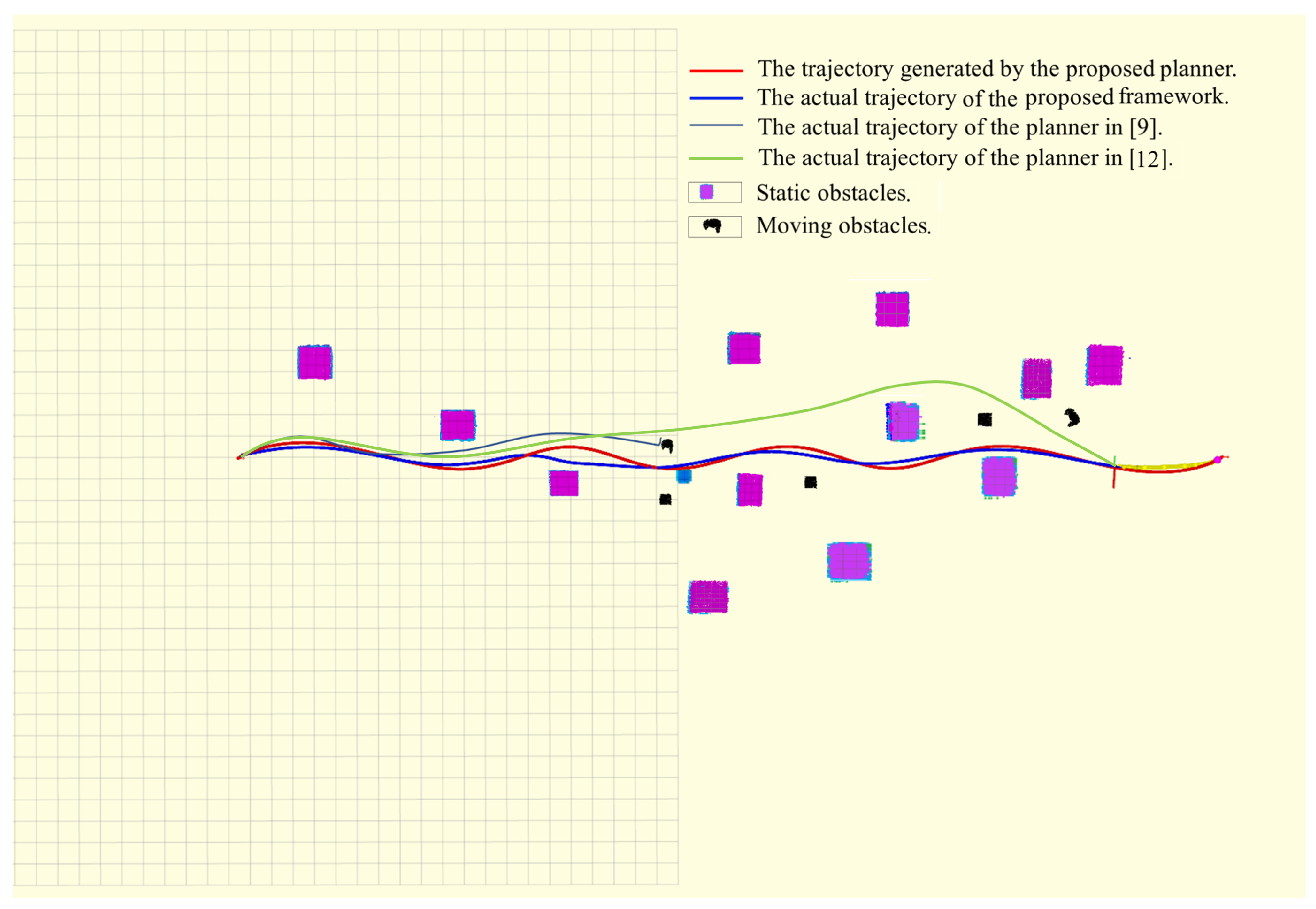
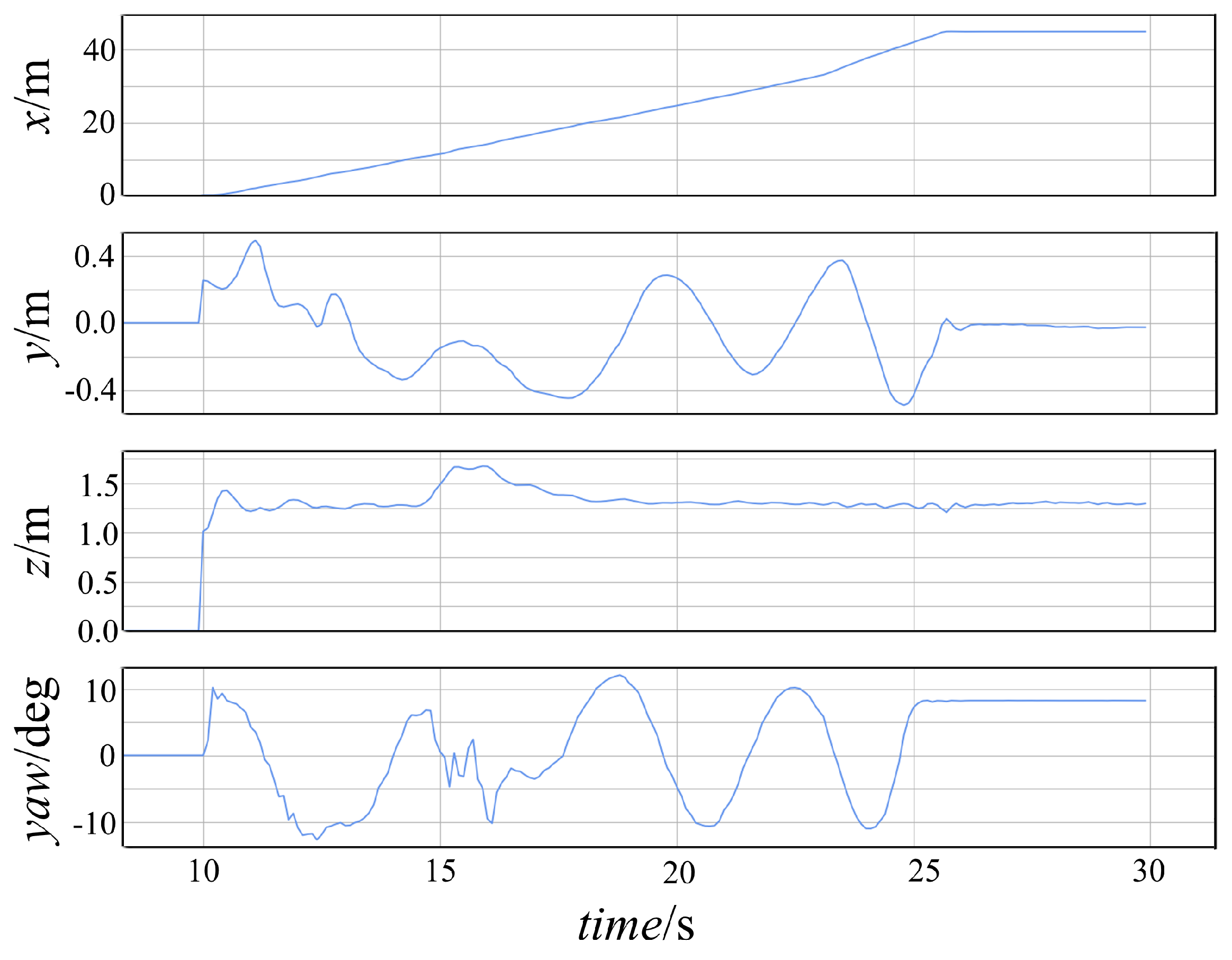
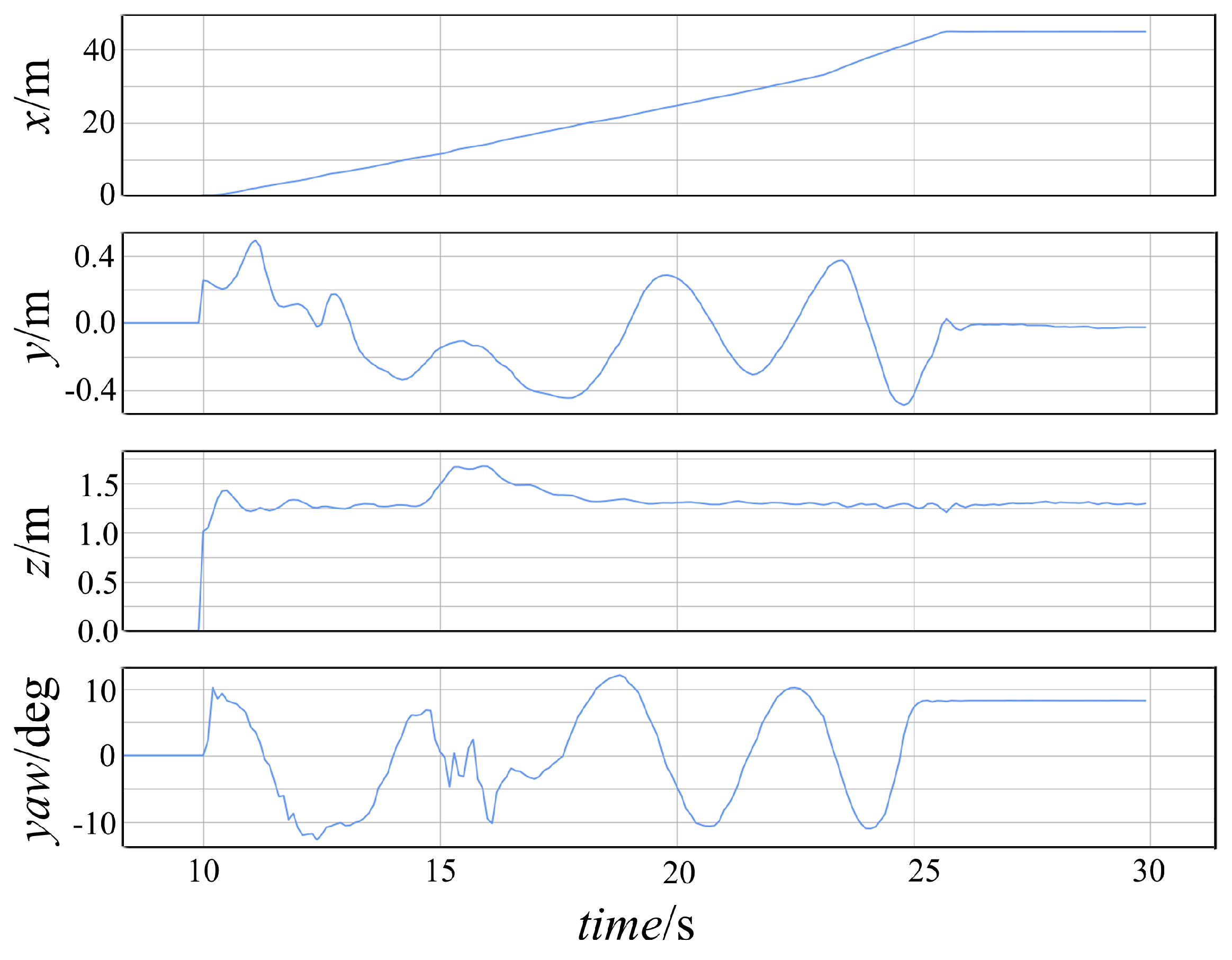
3.2. Simulation of the Proposed Framework with a Mixed Scene
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Cabreira, T.M.; Brisolara, L.B.; Paulo, R.F.J. Survey on coverage path planning with unmanned aerial vehicles. Drones 2019, 3, 4. [Google Scholar]
- Vergnano, A.; Franco, D.; Godio, A. Drone-borne ground-penetrating radar for snow cover mapping. Remote Sens. 2022, 14, 1763. [Google Scholar]
- Idrissi, M.; Salami, M.; Annaz, F. A Review of Quadrotor Unmanned Aerial Vehicles: Applications, Architectural Design and Control Algorithms. J. Intell. Robot. Syst. 2022, 104, 1–33. [Google Scholar]
- Manikandan, K.; Sriramulu, R. Optimized path planning strategy to enhance security under swarm of unmanned aerial vehicles. Drones 2022, 6, 336. [Google Scholar]
- Jiang, B.; Qin, K.; Li, T.; Lin, B.; Shi, M. Robust Cooperative Control of UAV Swarms for Dual-Camp Divergent Tracking of a Heterogeneous Target. Drones 2023, 7, 306. [Google Scholar]
- Qin, T.; Pan, J.; Cao, S.; Shen, S. A general optimization-based framework for local odometry estimation with multiple sensors. arXiv 2019, arXiv:1901.03638. [Google Scholar]
- Huang, F.; Yang, H.; Tan, X.; Peng, S.; Tao, J.; Peng, S. Fast reconstruction of 3D point cloud model using visual SLAM on embedded UAV development platform. Remote Sens. 2020, 12, 3308. [Google Scholar]
- Zhou, B.; Gao, F.; Wang, L.; Liu, C.; Shen, S. Robust and efficient quadrotor trajectory generation for fast autonomous flight. IEEE Robot. Autom. Lett. 2019, 4, 3529–3536. [Google Scholar]
- Zhou, B.; Gao, F.; Pan, J.; Shen, S. Robust Real-time UAV Replanning Using Guided Gradient-based Optimization and Topological Paths. arXiv 2019, arXiv:1912.12644. [Google Scholar]
- Zhou, B.; Pan, J.; Gao, F.; Shen, S. RAPTOR: Robust and Perception-aware Trajectory Replanning for Quadrotor Fast Flight. arXiv 2020, arXiv:2007.03465. [Google Scholar]
- Ye, H.; Zhou, X.; Wang, Z.; Xu, C.; Chu, J.; Gao, F. Tgk-planner: An efficient topology guided kinodynamic planner for autonomous quadrotors. IEEE Robot. Autom. Lett. 2020, 6, 494–501. [Google Scholar]
- Zhou, X.; Wang, Z.; Ye, H.; Xu, C.; Gao, F. EGO-Planner: An ESDF-Free Gradient-Based Local Planner for Quadrotors. IEEE Robot. Autom. Lett. 2021, 6, 478–485. [Google Scholar]
- Liu, S.; Atanasov, N.; Mohta, K.; Kumar, V. Search-based motion planning for quadrotors using linear quadratic minimum time control. In Proceedings of the 2017 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Vancouver, BC, Canada, 24–28 September 2017; pp. 2872–2879. [Google Scholar]
- Ming, T.; Zhang, D.; Ming, L.; Baohai, W. Tool path generation for clean-up machining of impeller by point-searching based method. Chin. J. Aeronaut. 2012, 25, 131–136. [Google Scholar]
- Zhou, W.J.; Fei, Z.X.; Hu, H.S.; Liu, L.; Li, J.N.; Smith, P.J. Real-time object subspace searching based on discrete searching paths and local energy. Int. J. Autom. Comput. 2016, 13, 99–107. [Google Scholar]
- Karaman, S.; Frazzoli, E. Sampling-based algorithms for optimal motion planning. Int. J. Robot. Res. 2011, 30, 846–894. [Google Scholar]
- Wei, K.; Ren, B. A method on dynamic path planning for robotic manipulator autonomous obstacle avoidance based on an improved RRT algorithm. Sensors 2018, 18, 571. [Google Scholar]
- Sakcak, B.; Bascetta, L.; Ferretti, G.; Prandini, M. Sampling-based optimal kinodynamic planning with motion primitives. Auton. Robot. 2019, 43, 1715–1732. [Google Scholar]
- Wang, Y.; Ji, J.; Wang, Q.; Xu, C.; Gao, F. Autonomous flights in dynamic environments with onboard vision. In Proceedings of the 2021 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Prague, Czech Republic, 27 September–1 October 2021; pp. 1966–1973. [Google Scholar]
- Wang, J.; Meng, M.Q.H.; Khatib, O. EB-RRT: Optimal motion planning for mobile robots. IEEE Trans. Autom. Sci. Eng. 2020, 17, 2063–2073. [Google Scholar]
- Bansal, S.; Chen, M.; Herbert, S.; Tomlin, C.J. Hamilton-jacobi reachability: A brief overview and recent advances. In Proceedings of the 2017 IEEE 56th Annual Conference on Decision and Control (CDC), Melbourne, Australia, 12–15 December 2017; pp. 2242–2253. [Google Scholar]
- Li, Z. Comparison between safety methods control barrier function vs. reachability analysis. arXiv 2021, arXiv:2106.13176. [Google Scholar]
- Nguyen, Q.; Hereid, A.; Grizzle, J.W.; Ames, A.D.; Sreenath, K. 3D dynamic walking on stepping stones with control barrier functions. In Proceedings of the 2016 IEEE 55th Conference on Decision and Control (CDC), Vegas, NV, USA, 12–14 December 2016; pp. 827–834. [Google Scholar]
- Ames, A.D.; Coogan, S.; Egerstedt, M.; Notomista, G.; Sreenath, K.; Tabuada, P. Control barrier functions: Theory and applications. In Proceedings of the 2019 18th European Control Conference (ECC), Naples, Italy, 25–28 June 2019; pp. 3420–3431. [Google Scholar]
- Nguyen, Q.; Sreenath, K. Exponential control barrier functions for enforcing high relative-degree safety-critical constraints. In Proceedings of the 2016 American Control Conference (ACC), Boston, MA, USA, 6–8 July 2016; pp. 322–328. [Google Scholar]
- Eppenberger, T.; Cesari, G.; Dymczyk, M.; Siegwart, R.; Dubé, R. Leveraging stereo-camera data for real-time dynamic obstacle detection and tracking. In Proceedings of the 2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Las Vegas, NV, USA, 25–29 October 2020; pp. 10528–10535. [Google Scholar]
- Xu, Z.; Zhan, X.; Xiu, Y.; Suzuki, C.; Shimada, K. Onboard dynamic-object detection and tracking for autonomous robot navigation with RGB-D camera. arXiv 2023, arXiv:2303.00132. [Google Scholar]
- Quinlan, S.; Khatib, O. Elastic bands: Connecting path planning and control. In Proceedings of the 1993 IEEE International Conference on Robotics and Automation, Atlanta, GA, USA, 2–6 May 1993; pp. 802–807. [Google Scholar]
- Rösmann, C.; Feiten, W.; Wösch, T.; Hoffmann, F.; Bertram, T. Trajectory modification considering dynamic constraints of autonomous robots. In Proceedings of the ROBOTIK 2012, 7th German Conference on Robotics, VDE, Munich, Germany, 21–22 May 2012; pp. 1–6. [Google Scholar]
- Harabor, D.; Grastien, A. Online graph pruning for pathfinding on grid maps. In Proceedings of the AAAI Conference on Artificial Intelligence, San Francisco, CA, USA, 7–11 August 2011; Volume 25, pp. 1114–1119. [Google Scholar]
- Harabor, D.; Grastien, A. Improving jump point search. In Proceedings of the International Conference on Automated Planning and Scheduling, Portsmouth, NH, USA, 21–26 June 2014; Volume 24, pp. 128–135. [Google Scholar]
- Zhou, R.G.; Yu, H.; Cheng, Y.; Li, F.X. Quantum image edge extraction based on improved Prewitt operator. Quantum Inf. Process. 2019, 18, 261. [Google Scholar]
- Qin, K. General matrix representations for B-splines. In Proceedings of the Pacific Graphics ’98. Sixth Pacific Conference on Computer Graphics and Applications (Cat. No.98EX208), Singapore, 26–29 October 1998; pp. 37–43. [Google Scholar]
- Lee, T.; Leok, M.; McClamroch, N.H. Geometric tracking control of a quadrotor UAV on SE (3). In Proceedings of the 49th IEEE Conference on Decision and Control (CDC), IEEE, Atlanta, GA, USA, 15–17 December 2010; pp. 5420–5425. [Google Scholar]
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Du, H.; Wang, Z.; Zhang, X. EF-TTOA: Development of a UAV Path Planner and Obstacle Avoidance Control Framework for Static and Moving Obstacles. Drones 2023, 7, 359. https://doi.org/10.3390/drones7060359
Du H, Wang Z, Zhang X. EF-TTOA: Development of a UAV Path Planner and Obstacle Avoidance Control Framework for Static and Moving Obstacles. Drones. 2023; 7(6):359. https://doi.org/10.3390/drones7060359
Chicago/Turabian StyleDu, Hongbao, Zhengjie Wang, and Xiaoning Zhang. 2023. "EF-TTOA: Development of a UAV Path Planner and Obstacle Avoidance Control Framework for Static and Moving Obstacles" Drones 7, no. 6: 359. https://doi.org/10.3390/drones7060359
APA StyleDu, H., Wang, Z., & Zhang, X. (2023). EF-TTOA: Development of a UAV Path Planner and Obstacle Avoidance Control Framework for Static and Moving Obstacles. Drones, 7(6), 359. https://doi.org/10.3390/drones7060359