
VisionICE: Air–Ground Integrated Intelligent Cognition Visual Enhancement System Based on a UAV


Abstract
1. Introduction
- (1)
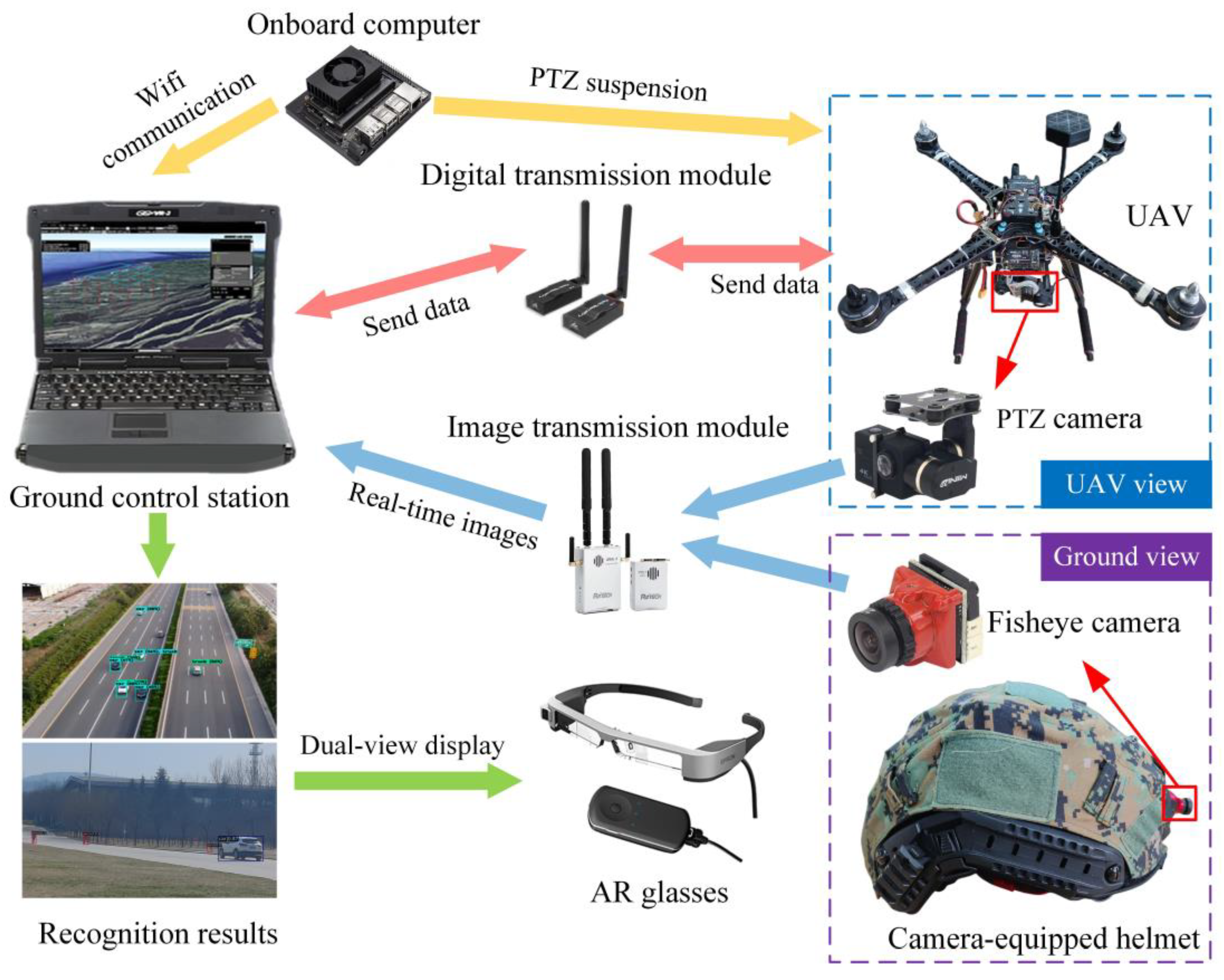
- Development of an air–ground integrated intelligent cognition visual enhancement system called VisionICE. This system utilizes wireless image sensors on a drone and camera-equipped helmet to simultaneously obtain air–ground perspective images, achieving efficient patrols on a large scale in particular environments to address the issues of low efficiency and limited search range in post-disaster search and rescue operations.
- (2)
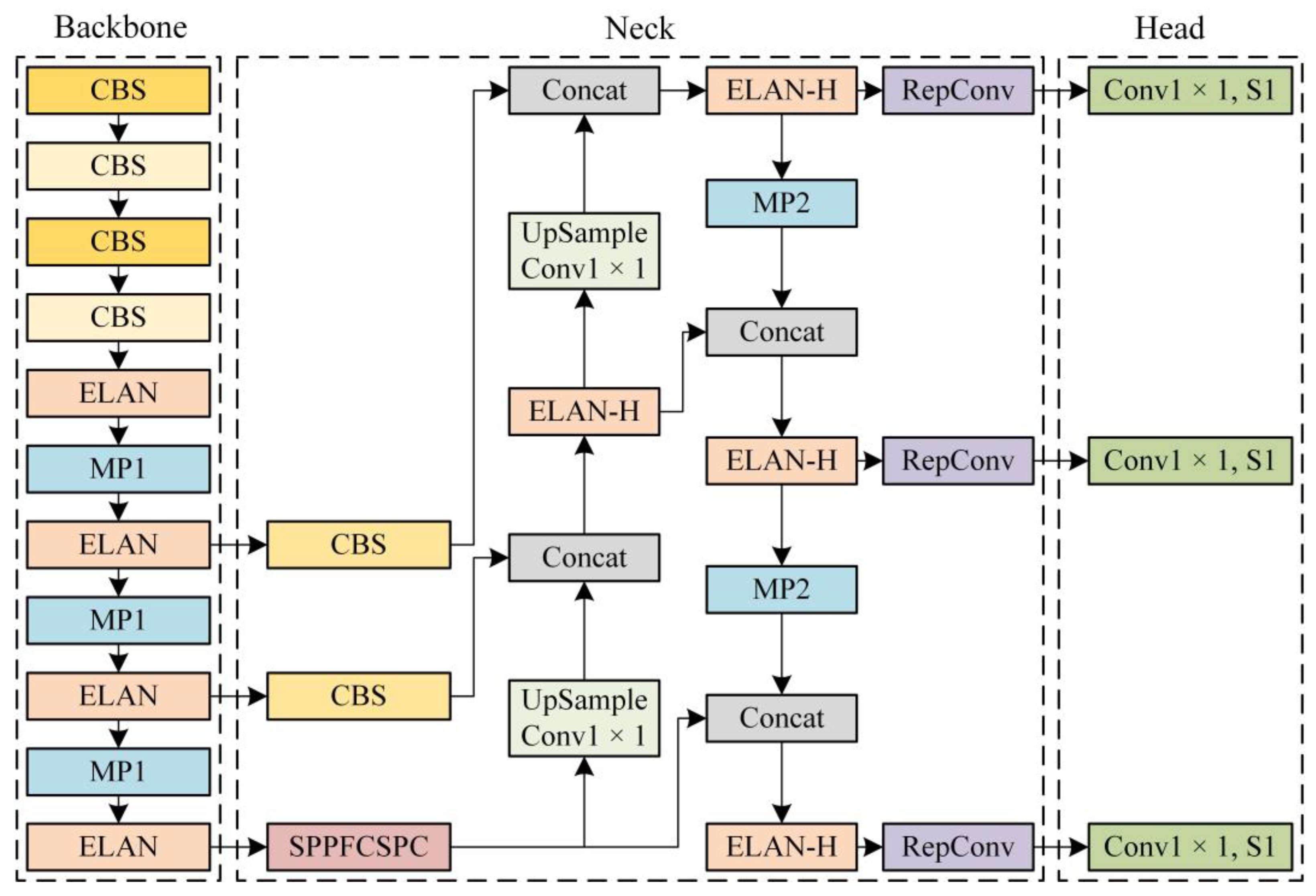
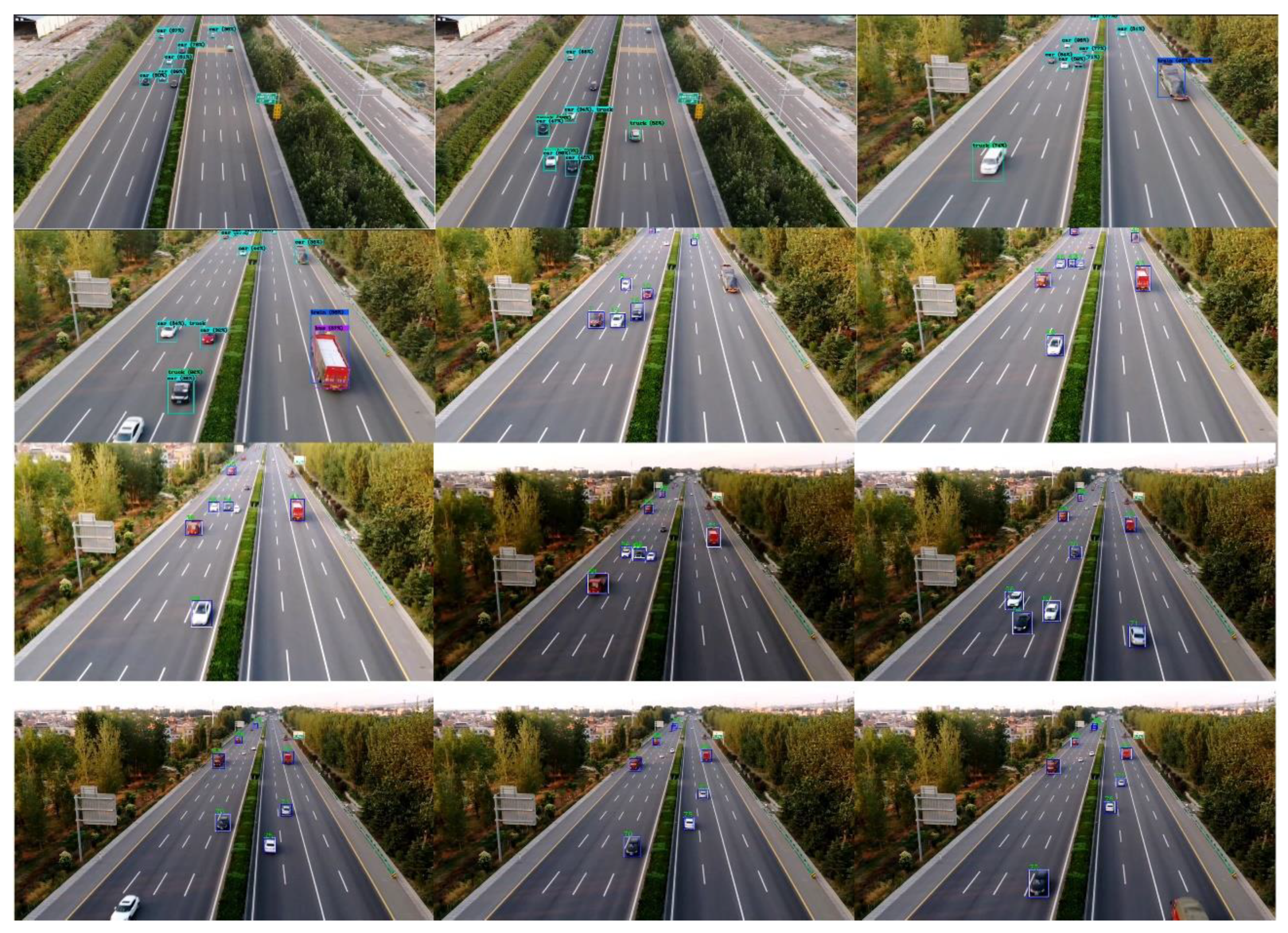
- Based on the YOLOv7 algorithm, object detection has been achieved in scenes such as highways, villages, farmland, mountains, and forests. In practical applications, YOLOv7 can accurately identify the target class, effectively locate the target position, and achieve a detection accuracy of up to 97% for interested targets. The YOLOv7 model has a detection speed of 40 FPS, which can meet the requirements of real-time target detection and provide reliable target recognition results for searchers.
- (3)
- Utilizing portable AR intelligent glasses, real-time display of object detection results on the cloud server and onboard computer provides searchers with an immersive visual experience. This improves the situational awareness of search personnel by issuing a potential threat or anomaly alerts. Compared to traditional post-disaster search and rescue operations, VisionICE exhibits significantly strong interactivity, experiential capabilities, and versatility.
2. Related Work
2.1. Drone Search and Rescue System
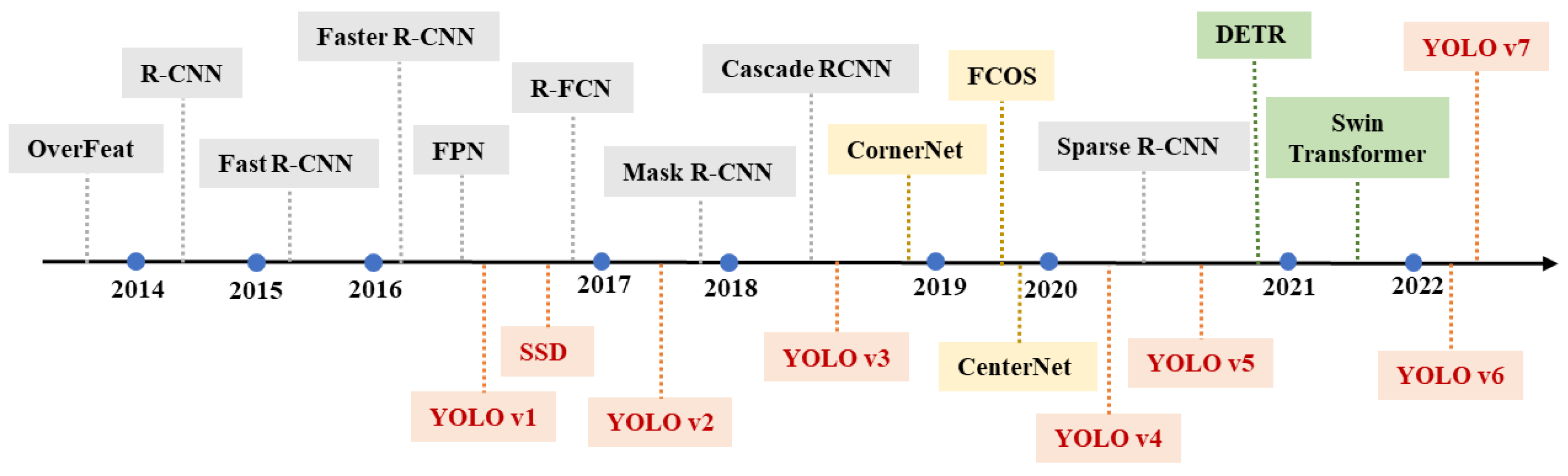
2.2. Target Detection Algorithm
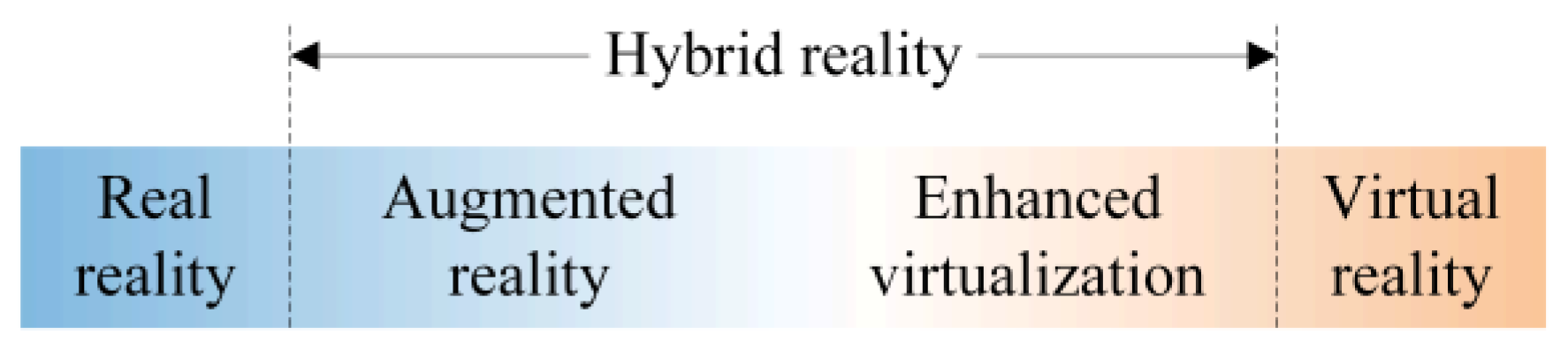
2.3. Drone Augmented Reality Technology
3. Our Approach
3.1. Hardware Framework
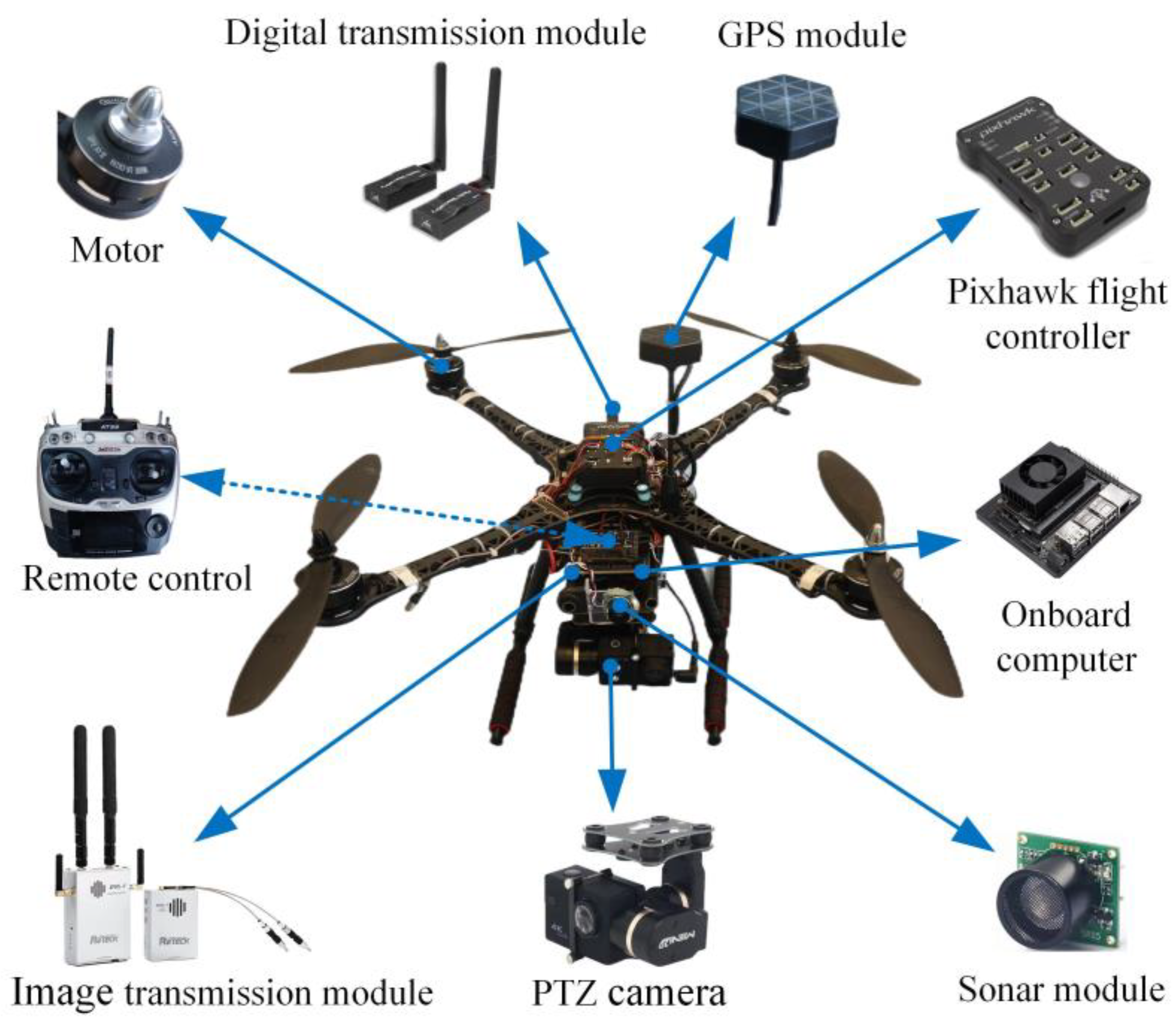
3.1.1. UAV System Components
3.1.2. Camera-Equipped Helmet
3.1.3. AR Smart Glasses
3.2. Software Framework
3.2.1. UAV Navigation Control Module
3.2.2. Target Recognition Module
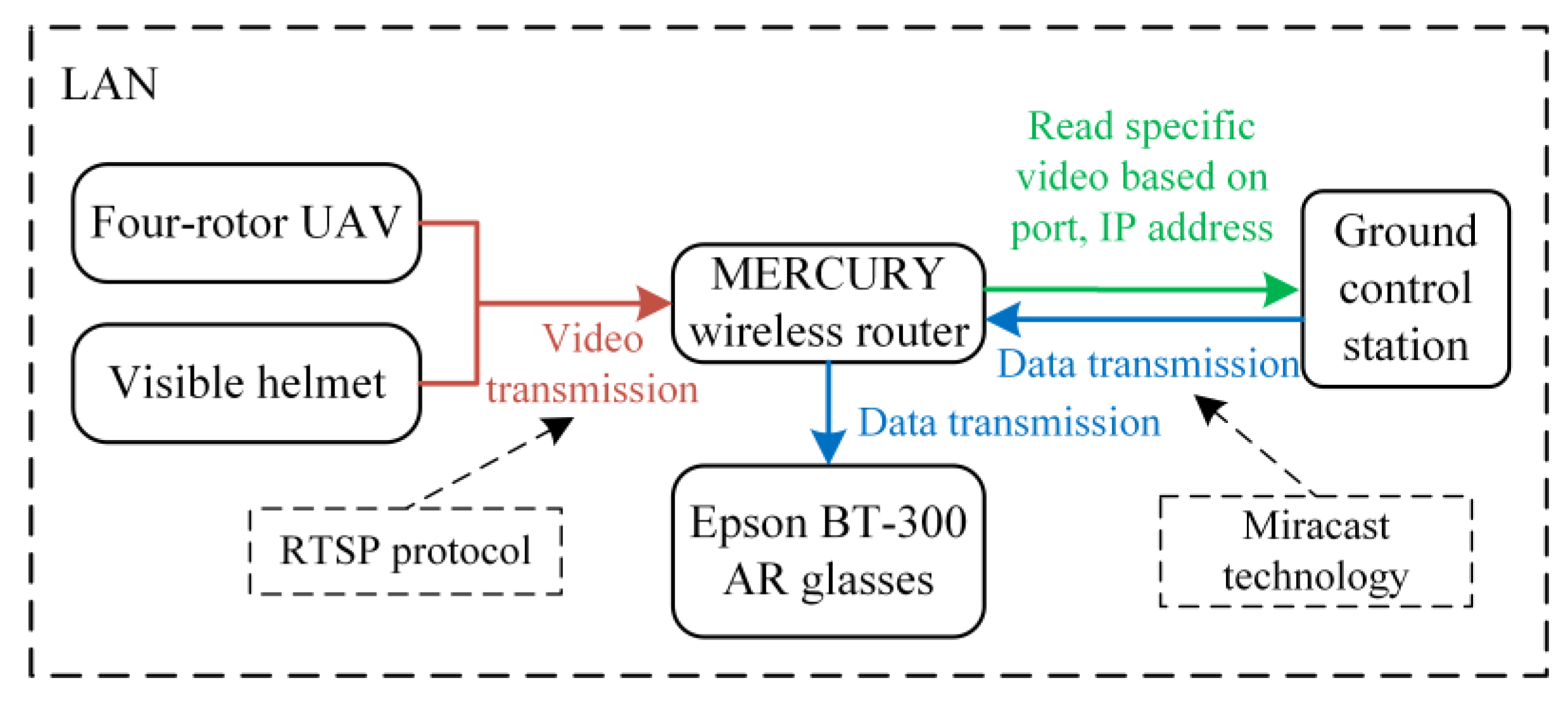
3.2.3. Multi-Process Information Communication Module
4. Experiments and Analysis
4.1. Drone Search Flight Test
4.2. VisionICE System Function Display
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Martinez-Alpiste, I.; Golcarenarenji, G.; Wang, Q.; Alcaraz-Calero, J.M. Search and rescue operation using UAVs: A case study. Expert Syst. Appl. 2021, 178, 114937. [Google Scholar] [CrossRef]
- Yang, T.; Jiang, Z.; Sun, R.; Cheng, N.; Feng, H. Maritime search and rescue based on group mobile computing for unmanned aerial vehicles and unmanned surface vehicles. IEEE Trans. Ind. Inform. 2020, 16, 7700–7708. [Google Scholar] [CrossRef]
- Wang, Y.; Liu, W.; Liu, J.; Sun, C. Cooperative USV–UAV marine search and rescue with visual navigation and reinforcement learning-based control. ISA Trans. 2023. [Google Scholar] [CrossRef]
- Mcgee, J.; Mathew, S.J.; Gonzalez, F. Unmanned aerial vehicle and artificial intelligence for thermal target detection in search and rescue applications. In Proceedings of the 2020 International Conference on Unmanned Aircraft Systems (ICUAS), Athina, Greece, 1–4 September 2020; pp. 883–891. [Google Scholar]
- Gotovac, S.; Zelenika, D.; Marušić, Ž.; Božić-Štulić, D. Visual-based person detection for search-and-rescue with uas: Humans vs. machine learning algorithm. Remote Sens. 2020, 12, 3295. [Google Scholar] [CrossRef]
- Lu, R.; Yang, X.; Jing, X.; Chen, L.; Fan, J.; Li, W.; Li, D. Infrared small target detection based on local hypergraph dissimilarity measure. IEEE Geosci. Remote Sens. Lett. 2020, 19, 1–5. [Google Scholar] [CrossRef]
- Lu, R.; Yang, X.; Li, W.; Fan, J.; Li, D.; Jing, X. Robust Infrared Small Target Detection via Multidirectional Derivative-Based Weighted Contrast Measure. IEEE Geosci. Remote Sens. Lett. 2020, 19, 1–5. [Google Scholar] [CrossRef]
- Wang, S.; Jiang, F.; Zhang, B.; Ma, R.; Hao, Q. Development of UAV-based target tracking and recognition systems. IEEE Trans. Intell. Transp. Syst. 2019, 21, 3409–3422. [Google Scholar] [CrossRef]
- Wang, X.V.; Wang, L. Augmented reality enabled human–robot collaboration. In Advanced Human-Robot Collaboration in Manufacturing; Springer: Berlin/Heidelberg, Germany, 2021; pp. 395–411. [Google Scholar]
- Unal, M.; Bostanci, E.; Sertalp, E.; Guzel, M.S.; Kanwal, N. Geo-location based augmented reality application for cultural heritage using drones. In Proceedings of the 2018 2nd International Symposium on Multidisciplinary Studies and Innovative Technologies (ISMSIT), Ankara, Turkey, 19–21 October 2018; pp. 1–4. [Google Scholar]
- Kikuchi, N.; Fukuda, T.; Yabuki, N. Future landscape visualization using a city digital twin: Integration of augmented reality and drones with implementation of 3D model-based occlusion handling. J. Comput. Des. Eng. 2022, 9, 837–856. [Google Scholar] [CrossRef]
- Huuskonen, J.; Oksanen, T. Soil sampling with drones and augmented reality in precision agriculture. Comput. Electron. Agric. 2018, 154, 25–35. [Google Scholar] [CrossRef]
- Liu, C.; Shen, S. An augmented reality interaction interface for autonomous drone. In Proceedings of the 2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Las Vegas, NV, USA, 25–29 October 2020; pp. 11419–11424. [Google Scholar]
- Erat, O.; Isop, W.A.; Kalkofen, D.; Schmalstieg, D. Drone-augmented human vision: Exocentric control for drones exploring hidden areas. IEEE Trans. Vis. Comput. Graph. 2018, 24, 1437–1446. [Google Scholar] [CrossRef]
- Valsan, A.; Parvathy, B.; Gh, V.D.; Unnikrishnan, R.S.; Reddy, P.K.; Vivek, A. Unmanned aerial vehicle for search and rescue mission. In Proceedings of the 2020 4th International Conference on Trends in Electronics and Informatics (ICOEI)(48184), Tirunelveli, India, 15–17 June 2020; pp. 684–687. [Google Scholar]
- Kulkarni, S.; Chaphekar, V.; Chowdhury, M.M.U.; Erden, F.; Guvenc, I. Uav aided search and rescue operation using reinforcement learning. In Proceedings of the 2020 SoutheastCon, Raleigh, NC, USA, 11–15 March 2020; pp. 1–8. [Google Scholar]
- Silvagni, M.; Tonoli, A.; Zenerino, E.; Chiaberge, M. Multipurpose UAV for search and rescue operations in mountain avalanche events. Geomat. Nat. Hazards Risk 2017, 8, 18–33. [Google Scholar] [CrossRef]
- Girshick, R. Fast r-cnn. In Proceedings of the IEEE International Conference on Computer Vision, Santiago, Chile, 11–18 December 2015; pp. 1440–1448. [Google Scholar]
- Ren, S.; He, K.; Girshick, R.; Sun, J. Faster r-cnn: Towards real-time object detection with region proposal networks. In Advances in Neural Information Processing Systems; Curran Associates: Montreal, Canada, 2015; pp. 1–9. [Google Scholar]
- He, K.; Gkioxari, G.; Dollár, P.; Girshick, R. Mask r-cnn. In Proceedings of the IEEE International Conference on Computer Vision, Venice, Italy, 22–29 October 2017; pp. 2961–2969. [Google Scholar]
- Cai, Z.; Vasconcelos, N. Cascade r-cnn: Delving into high quality object detection. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Salt Lake City, UT, USA, 18–22 June 2018; pp. 6154–6162. [Google Scholar]
- Sun, P.; Zhang, R.; Jiang, Y.; Kong, T.; Xu, C.; Zhan, W.; Luo, P. Sparse r-cnn: End-to-end object detection with learnable proposals. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Nashville, TN, USA, 20–25 June 2021; pp. 14454–14463. [Google Scholar]
- Redmon, J.; Divvala, S.; Girshick, R.; Farhadi, A. You only look once: Unified, real-time object detection. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Las Vegas, NV, USA, 26 June–1 July 2016; pp. 779–788. [Google Scholar]
- Liu, W.; Anguelov, D.; Erhan, D.; Szegedy, C.; Reed, S.; Fu, C.Y.; Berg, A.C. Ssd: Single shot multibox detector. In Proceedings of the Computer Vision–ECCV 2016: 14th European Conference, Amsterdam, The Netherlands, 11–14 October 2016; pp. 21–37. [Google Scholar]
- Redmon, J.; Farhadi, A. YOLO9000: Better, faster, stronger. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Honolulu, HI, USA, 21–26 July 2017; pp. 7263–7271. [Google Scholar]
- Redmon, J.; Farhadi, A. Yolov3: An incremental improvement. arXiv 2018, arXiv:1804.02767. [Google Scholar]
- Li, C.; Li, L.; Jiang, H.; Weng, K.; Geng, Y.; Li, L.; Wei, X. YOLOv6: A single-stage object detection framework for industrial applications. arXiv 2022, arXiv:2209.02976. [Google Scholar]
- Wang, C.-Y.; Bochkovskiy, A.; Liao, H.-Y.M. YOLOv7: Trainable bag-of-freebies sets new state-of-the-art for real-time object detectors. arXiv 2022, arXiv:2207.02696. [Google Scholar]
- Ge, Z.; Liu, S.; Wang, F.; Li, Z.; Sun, J. Yolox: Exceeding yolo series in 2021. arXiv 2021, arXiv:2107.08430. [Google Scholar]
- Bochkovskiy, A.; Wang, C.-Y.; Liao, H.-Y.M. Yolov4: Optimal speed and accuracy of object detection. arXiv 2020, arXiv:2004.10934. [Google Scholar]
- Liu, W.; Quijano, K.; Crawford, M.M. YOLOv5-Tassel: Detecting tassels in RGB UAV imagery with improved YOLOv5 based on transfer learning. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2022, 15, 8085–8094. [Google Scholar] [CrossRef]
- Gao, L.; Xiong, L.; Xia, X.; Lu, Y.; Yu, Z.; Khajepour, A. Improved vehicle localization using on-board sensors and vehicle lateral velocity. IEEE Sens. J. 2022, 22, 6818–6831. [Google Scholar] [CrossRef]
- Xia, X.; Hashemi, E.; Xiong, L.; Khajepour, A. Autonomous Vehicle Kinematics and Dynamics Synthesis for Sideslip Angle Estimation Based on Consensus Kalman Filter. IEEE Trans. Control. Syst. Technol. 2022, 31, 179–192. [Google Scholar] [CrossRef]
- Xia, X.; Xiong, L.; Huang, Y.; Lu, Y.; Gao, L.; Xu, N.; Yu, Z. Estimation on IMU yaw misalignment by fusing information of automotive onboard sensors. Mech. Syst. Signal Process. 2022, 162, 107993. [Google Scholar] [CrossRef]
- Liu, W.; Xia, X.; Xiong, L.; Lu, Y.; Gao, L.; Yu, Z. Automated vehicle sideslip angle estimation considering signal measurement characteristic. IEEE Sens. J. 2021, 21, 21675–21687. [Google Scholar] [CrossRef]
- Xiong, L.; Xia, X.; Lu, Y.; Liu, W.; Gao, L.; Song, S.; Yu, Z. IMU-based automated vehicle body sideslip angle and attitude estimation aided by GNSS using parallel adaptive Kalman filters. IEEE Trans. Veh. Technol. 2020, 69, 10668–10680. [Google Scholar] [CrossRef]
- Xia, X.; Meng, Z.; Han, X.; Li, H.; Tsukiji, T.; Xu, R.; Ma, J. Automated Driving Systems Data Acquisition and Processing Platform. arXiv 2022, arXiv:2211.13425. [Google Scholar]
- Oztemel, E.; Gursev, S. Literature review of Industry 4.0 and related technologies. J. Intell. Manuf. 2020, 31, 127–182. [Google Scholar] [CrossRef]
- Baroroh, D.K.; Chu, C.-H.; Wang, L. Systematic literature review on augmented reality in smart manufacturing: Collaboration between human and computational intelligence. J. Manuf. Syst. 2021, 61, 696–711. [Google Scholar] [CrossRef]
- Siew, C.Y.; Ong, S.-K.; Nee, A.Y. A practical augmented reality-assisted maintenance system framework for adaptive user support. Robot. Comput.-Integr. Manuf. 2019, 59, 115–129. [Google Scholar] [CrossRef]
- Hietanen, A.; Pieters, R.; Lanz, M.; Latokartano, J.; Kämäräinen, J.K. AR-based interaction for human-robot collaborative manufacturing. Robot. Comput.-Integr. Manuf. 2020, 63, 101891. [Google Scholar] [CrossRef]
- Jost, J.; Kirks, T.; Gupta, P.; Lünsch, D.; Stenzel, J. Safe human-robot-interaction in highly flexible warehouses using augmented reality and heterogenous fleet management system. In Proceedings of the 2018 IEEE International Conference on Intelligence and Safety for Robotics (ISR), Shenyang, China, 24–27 August 2018; pp. 256–260. [Google Scholar] [CrossRef]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Systems | Component List | Specification |
|---|---|---|
| S500 Quadrotor UAV | Flight Controller | Pixhawk 2.4.8 |
| Electronic Speed Control | XXD-40A | |
| Motor | QM3507-680KV | |
| Remote Control | AT9S | |
| Digital Transmission Module | 3DR V5 Radio | |
| Image Transmission Module | R2TECK-DVL1 | |
| GPS Module | GPS M8N | |
| Sonar Obstacle Avoidance Module | RCWL-1605 | |
| Power Supply System | 4S Lithium Cell | |
| Onboard Computer | Jetson Xavier NX | |
| PTZ Camera | FIREFLY 8s | |
| Helmet | Camera | IP Camera |
| AR Glasses | Epson MOVERIO BT-300 | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, Q.; Yang, X.; Lu, R.; Fan, J.; Wang, S.; Qin, Z. VisionICE: Air–Ground Integrated Intelligent Cognition Visual Enhancement System Based on a UAV. Drones 2023, 7, 268. https://doi.org/10.3390/drones7040268
Li Q, Yang X, Lu R, Fan J, Wang S, Qin Z. VisionICE: Air–Ground Integrated Intelligent Cognition Visual Enhancement System Based on a UAV. Drones. 2023; 7(4):268. https://doi.org/10.3390/drones7040268
Chicago/Turabian StyleLi, Qingge, Xiaogang Yang, Ruitao Lu, Jiwei Fan, Siyu Wang, and Zhen Qin. 2023. "VisionICE: Air–Ground Integrated Intelligent Cognition Visual Enhancement System Based on a UAV" Drones 7, no. 4: 268. https://doi.org/10.3390/drones7040268
APA StyleLi, Q., Yang, X., Lu, R., Fan, J., Wang, S., & Qin, Z. (2023). VisionICE: Air–Ground Integrated Intelligent Cognition Visual Enhancement System Based on a UAV. Drones, 7(4), 268. https://doi.org/10.3390/drones7040268