
Decentralized UAV Swarm Scheduling with Constrained Task Exploration Balance


Abstract
1. Introduction
2. Preliminaries
2.1. Symbol Definition
2.2. Problem Formulation
3. Method
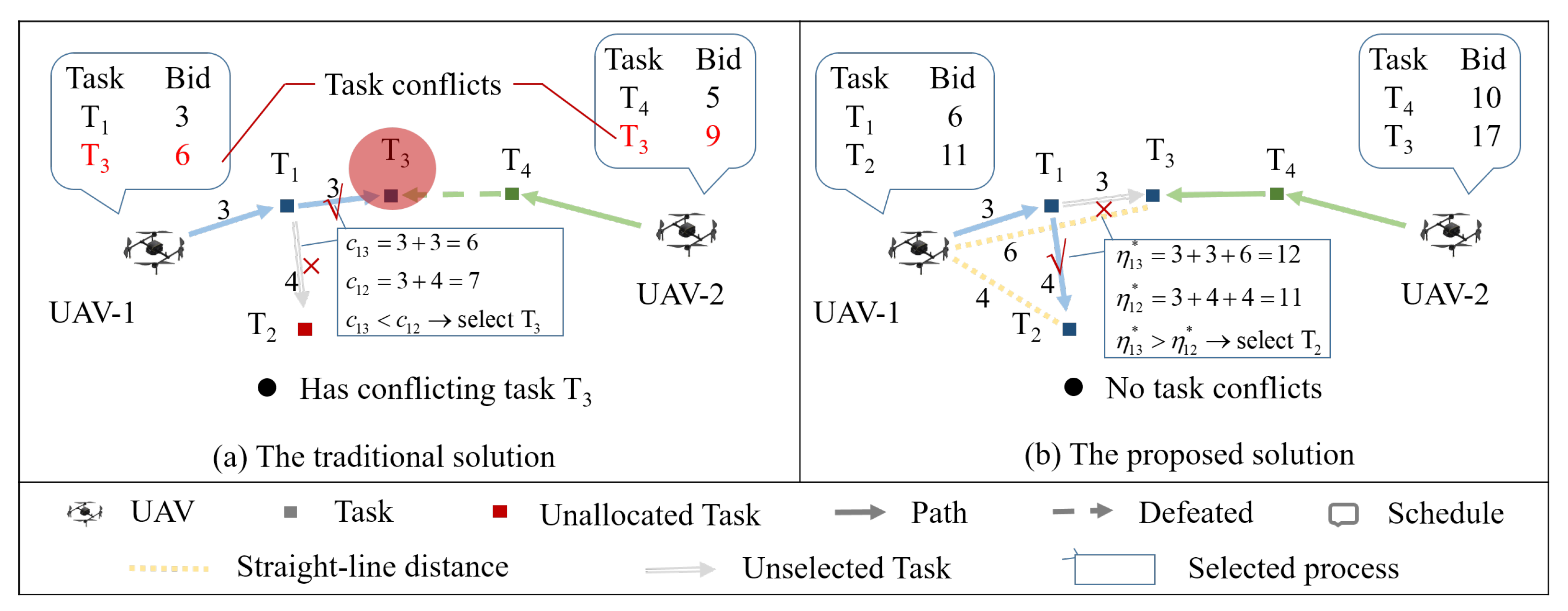
3.1. Basic Idea
3.2. Task Selection
| Algorithm 1 Task selection |
|
3.3. Swarm Consensus
- (1)
- In this paper, the task consideration, similar to the cost, is used as the bid, where the lower the better. In other words, the lower the bid, the better.
- (2)
- Different from the traditional bid reset to 0, this paper resets to a maximum value.
- (3)
- In order to improve the convergence speed, the receiver will update its information if the timestamp of the third party is equal.
| Algorithm 2 Swarm consensus |
|
3.4. Overall Process
| Algorithm 3 Overall Process |
|
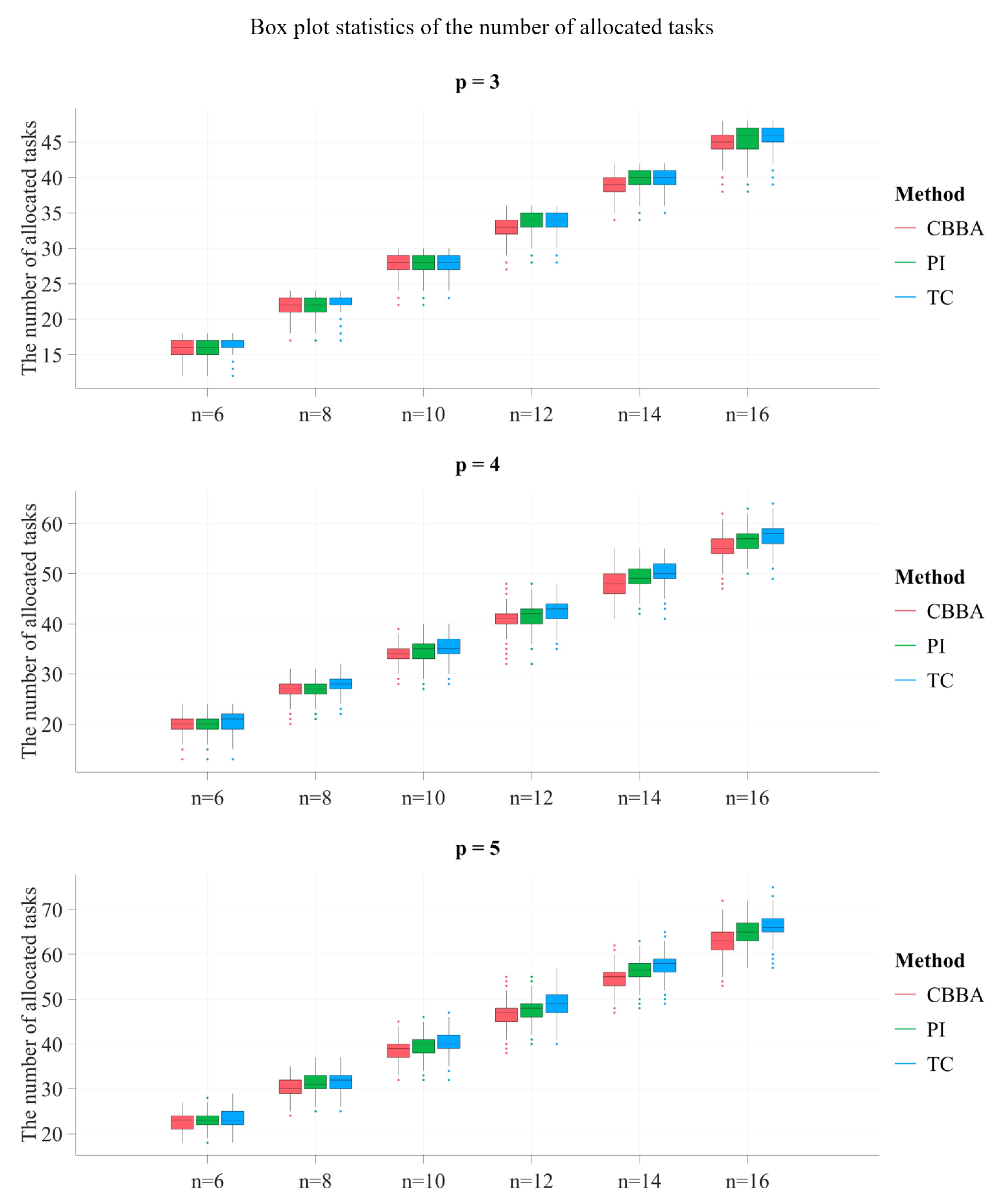
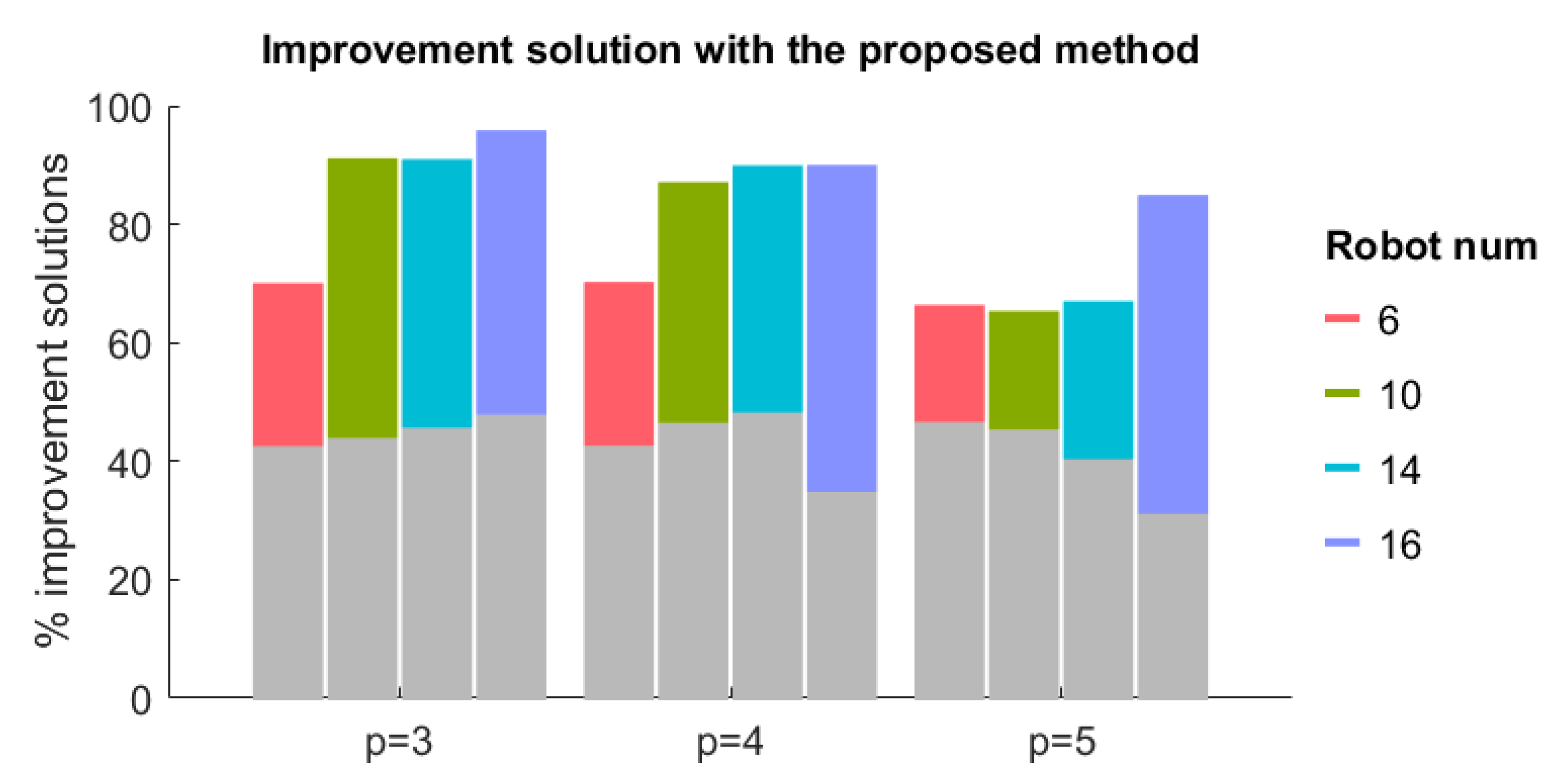
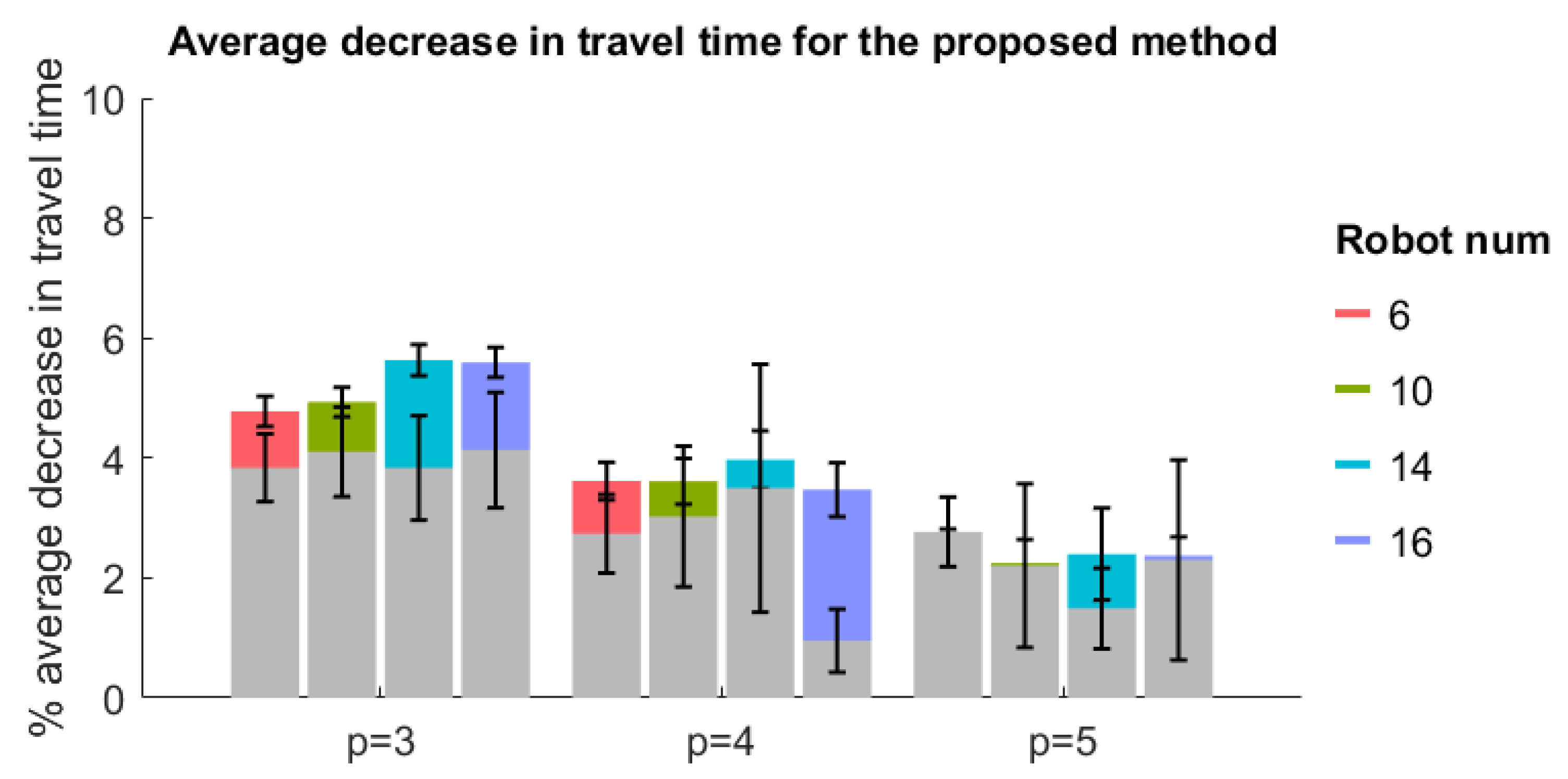
4. Experiment
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Atn, G.M.; Duan, M.S.; Voulgaris, P.G. A swarm-based approach to dynamic coverage control of multi-agent systems. Automatica 2020, 112, 108637. [Google Scholar]
- Fedele, G.; D’Alfonso, L. A kinematic model for swarm finite-time trajectory tracking. IEEE Trans. Cybern. 2018, 49, 3806–3815. [Google Scholar] [CrossRef] [PubMed]
- Salhab, R.; Le Ny, J.; Malhame, R.P. Dynamic Collective Choice: Social Optima. IEEE Trans. Autom. Control 2018, 63, 3487–3494. [Google Scholar] [CrossRef]
- Fabian, Z.; Yoon, S.Y. Coordination of multi-agent leader-follower system with time-varying objective function. In Proceedings of the 2016 IEEE 55th Conference on Decision and Control (CDC), Las Vegas, NV, USA, 12–14 December 2016; pp. 69–74. [Google Scholar]
- Chung, S.J.; Paranjape, A.A.; Dames, P.; Shen, S.; Kumar, V. A survey on aerial swarm robotics. IEEE Trans. Robot. 2018, 34, 837–855. [Google Scholar] [CrossRef]
- Pan, C.H.; Huang, H.C. A hybrid genetic algorithm for no-wait job shop scheduling problems. Expert Syst. Appl. 2009, 36, 5800–5806. [Google Scholar] [CrossRef]
- Liu, Q.; Li, X.; Gao, L.; Li, Y. A modified genetic algorithm with new encoding and decoding methods for integrated process planning and scheduling problem. IEEE Trans. Cybern. 2020, 51, 4429–4438. [Google Scholar] [CrossRef] [PubMed]
- Pan, D.; Chen, Y. An Improved Ant Colony Optimization for Vehicle Routing Problem with Time Windows. Logistics Sci-Tech 2014. [Google Scholar]
- Wang, X.; Choi, T.M.; Liu, H.; Yue, X. Novel ant colony optimization methods for simplifying solution construction in vehicle routing problems. IEEE Trans. Intell. Transp. Syst. 2016, 17, 3132–3141. [Google Scholar] [CrossRef]
- Wei, Y.; Li, Q. Survey on Particle Swarm Optimization Algorithm. Eng. Sci. 2004. [Google Scholar]
- Han, H.; Bai, X.; Hou, Y.; Qiao, J. Multi-Task Particle Swarm Optimization with Dynamic On-Demand Allocation. IEEE Trans. Evol. Comput. 2022. [Google Scholar] [CrossRef]
- Jünger, M.; Reinelt, G.; Rinaldi, G. The traveling salesman problem. Handbooks Oper. Res. Manag. Sci. 1995, 7, 225–330. [Google Scholar]
- Hoffman, K.L.; Padberg, M.; Rinaldi, G. Traveling salesman problem. Encycl. Oper. Res. Manag. Sci. 2013, 1, 1573–1578. [Google Scholar]
- Chen, C.H.; Chou, F.I.; Chou, J.H. Optimization of Robotic Task Sequencing Problems by Crowding Evolutionary Algorithms. IEEE Trans. Syst. Man Cybern. Syst. 2022, 52, 6870–6885. [Google Scholar] [CrossRef]
- Korsah, G.A.; Stentz, A.; Dias, M.B. A comprehensive taxonomy for multi-robot task allocation. Int. J. Robot. Res. 2013, 32, 1495–1512. [Google Scholar] [CrossRef]
- Geng, N.; Meng, Q.; Gong, D.; Chung, P.W.H. How Good are Distributed Allocation Algorithms for Solving Urban Search and Rescue Problems? A Comparative Study with Centralized Algorithms. IEEE Trans Autom. Sci. Eng. 2019, 16, 478–485. [Google Scholar] [CrossRef]
- Bai, X.; Fielbaum, A.; Kronmuller, M.; Knoedler, L.; Alonso-Mora, J. Group-Based Distributed Auction Algorithms for Multi-Robot Task Assignment. IEEE Trans Autom. Sci. Eng. 2022. [Google Scholar] [CrossRef]
- Choi, H.L.; Brunet, L.; How, J.P. Consensus-based decentralized auctions for robust task allocation. IEEE Trans. Robot. 2009, 25, 912–926. [Google Scholar] [CrossRef]
- Zhao, W.; Meng, Q.; Chung, P.W. A heuristic distributed task allocation method for multivehicle multitask problems and its application to search and rescue scenario. IEEE Trans. Cybern. 2015, 46, 902–915. [Google Scholar] [CrossRef]
- Buckman, N.; Choi, H.L.; How, J.P. Partial replanning for decentralized dynamic task allocation. In Proceedings of the AIAA Scitech 2019 Forum, San Diego, CA, USA, 7–11 January 2019; p. 915. [Google Scholar]
- Turner, J.; Meng, Q.; Schaefer, G.; Whitbrook, A.; Soltoggio, A. Distributed task rescheduling with time constraints for the optimization of total task allocations in a multirobot system. IEEE Trans. Cybern. 2017, 48, 2583–2597. [Google Scholar] [CrossRef]
- Xiong, J.; Li, J.; Li, J.; Kang, S.; Liu, C.; Yang, C. Probability-tuned market-based allocations for UAV swarms under unreliable observations. IEEE Trans. Cybern. 2022. [Google Scholar] [CrossRef]
- Yi, X.; Zhu, A.; Yang, S.X.; Luo, C. A bio-inspired approach to task assignment of swarm robots in 3-D dynamic environments. IEEE Trans. Cybern. 2016, 47, 974–983. [Google Scholar] [CrossRef] [PubMed]
- Turner, J.; Meng, Q.; Schaefer, G.; Soltoggio, A. Fast consensus for fully distributed multi-agent task allocation. In Proceedings of the 33rd ACM Symposium on Applied Computing, Pau, France, 9–13 April 2018; pp. 832–839. [Google Scholar]
- Jin, L.; Liang, S.; Luo, X.; Zhou, M. Distributed and Time-Delayed-Winner-Take-All Network for Competitive Coordination of Multiple Robots. IEEE Trans. Cybern. 2022, 53, 641–652. [Google Scholar] [CrossRef] [PubMed]
- Alsamhi, S.H.; Shvetsov, A.V.; Kumar, S.; Hassan, J.; Alhartomi, M.A.; Shvetsova, S.V.; Sahal, R.; Hawbani, A. Computing in the sky: A survey on intelligent ubiquitous computing for uav-assisted 6G networks and industry 4.0/5.0. Drones 2022, 6, 177. [Google Scholar] [CrossRef]
- Alsamhi, S.H.; Afghah, F.; Sahal, R.; Hawbani, A.; Al-qaness, M.A.; Lee, B.; Guizani, M. Green internet of things using UAVs in B5G networks: A review of applications and strategies. Ad Hoc Netw. 2021, 117, 102505. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Categories | Methods | Contributions | Limitations |
|---|---|---|---|
| basic scheduling | CBBA [18] | basic mechanism | network |
| PI [19] | novel concept | network | |
| the proposed method | novel concept | network | |
| scheduling extension | rescheduling [20,21] | dynamic regulation | network |
| probability-tuned [22,23] | robust performance | network | |
| others [24,25] | optimization | network |
| Symbol | Description |
|---|---|
| n | number of UAVs |
| m | number of tasks |
| UAV ID | |
| j | task ID |
| the schedule of UAV i and UAV k | |
| the set of all UAV IDs | |
| the set of all task IDs | |
| the cost of UAV i to perform task j | |
| the maximum number of tasks that UAV i is able to perform | |
| the time of UAV i to perform task j | |
| the deadline of task j | |
| the task consideration of UAV i to perform task j | |
| the total cost of UAV i | |
| the regression value of the task j for UAV i | |
| the task consideration of UAV i to add task j | |
| the winning bid of task j considered by UAV i | |
| the winner of task j considered by UAV i | |
| the schedule of UAV i after removing task j | |
| the schedule of UAV i after adding task j |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, R.; Li, J.; Peng, T. Decentralized UAV Swarm Scheduling with Constrained Task Exploration Balance. Drones 2023, 7, 267. https://doi.org/10.3390/drones7040267
Chen R, Li J, Peng T. Decentralized UAV Swarm Scheduling with Constrained Task Exploration Balance. Drones. 2023; 7(4):267. https://doi.org/10.3390/drones7040267
Chicago/Turabian StyleChen, Runfeng, Jie Li, and Ting Peng. 2023. "Decentralized UAV Swarm Scheduling with Constrained Task Exploration Balance" Drones 7, no. 4: 267. https://doi.org/10.3390/drones7040267
APA StyleChen, R., Li, J., & Peng, T. (2023). Decentralized UAV Swarm Scheduling with Constrained Task Exploration Balance. Drones, 7(4), 267. https://doi.org/10.3390/drones7040267