
A Preliminary Study on the Development of a New UAV Concept and the Associated Flight Method

 , and
, and
Abstract
1. Introduction
1.1. Definition and History of UAVs
1.2. Classification of the UAVs
1.3. Aim of the Present Work
2. Materials and Methods
3. Results
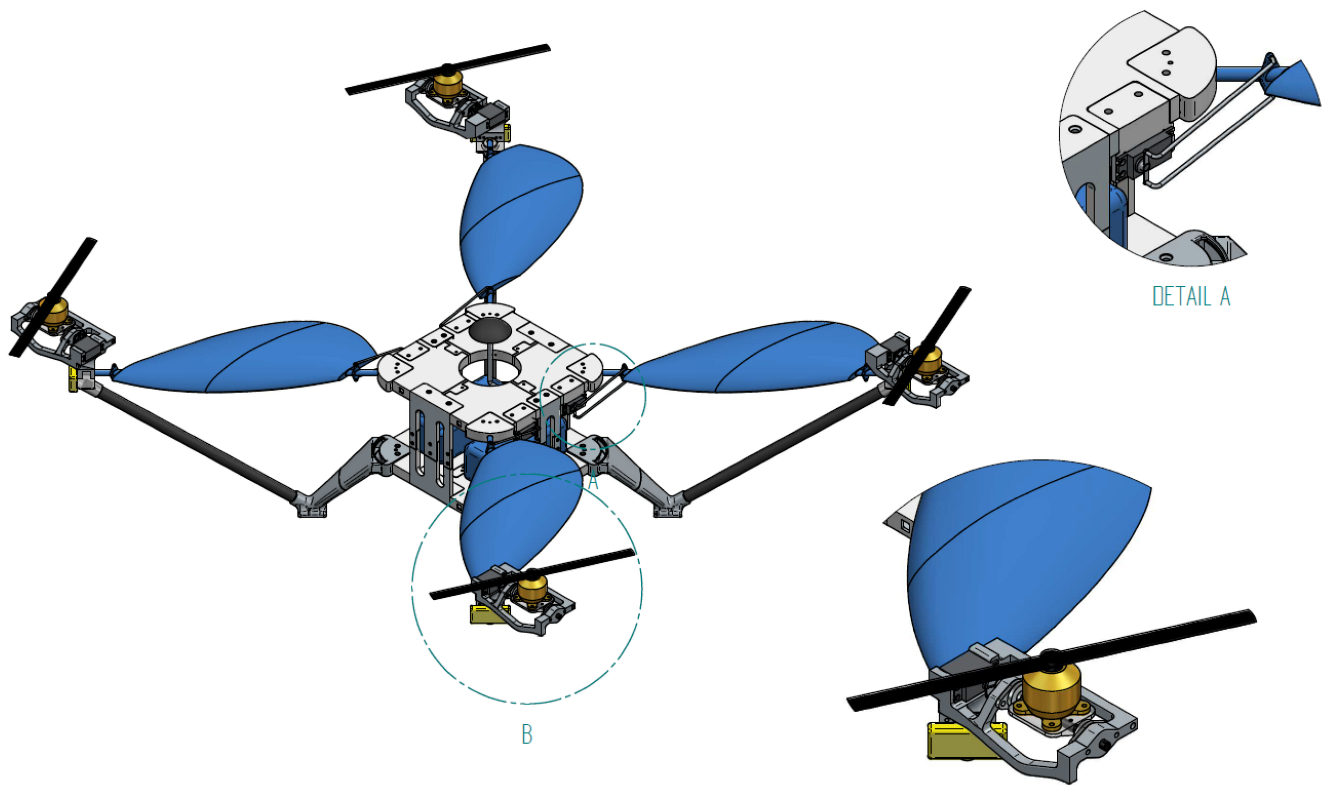
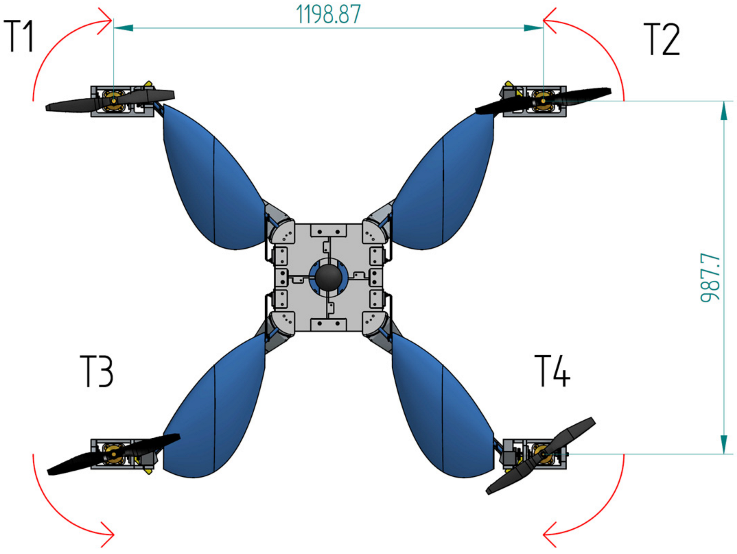
3.1. Design and Definition of the UAV Concept
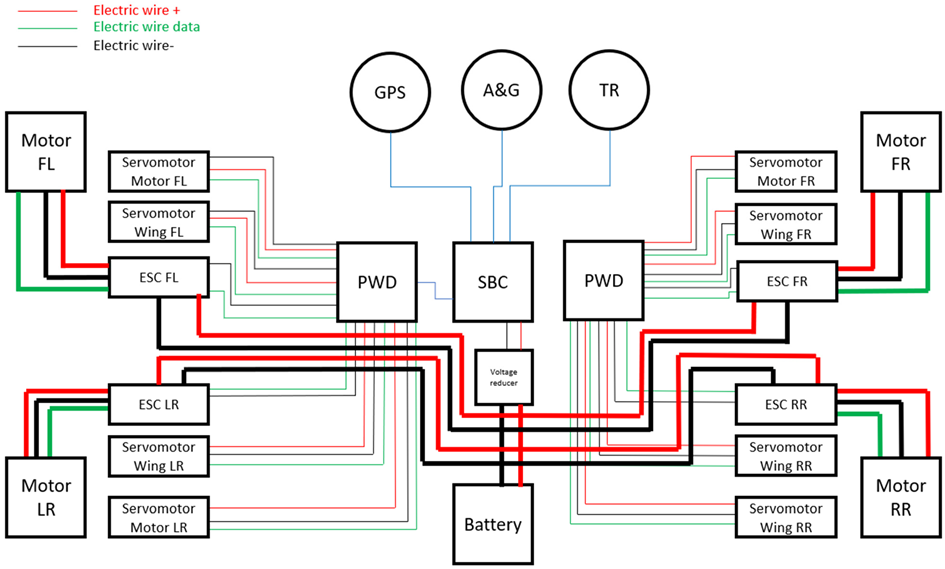
3.2. Electronic Equipment of the UAV
- ➢
- 4 engines
- ➢
- 8 servomotors (4 to move the wings and 4 to move the engines)
- ➢
- 4 ESCs (electronic speed controller)
- ➢
- 2 Single-board computers
- ➢
- Accumulator
- ➢
- Voltage reducer
- ➢
- GPS
- ➢
- Accelerometer and gyroscope
- ➢
- Signal transmission system with emission-reception
- PWD—Power Drive Hut (power distribution system)
- A&G—accelerometer and gyroscope
- TR—signal transmission system with emission-reception
- FL—front left
- FR—front right
- LR—left rear
- RR—right rear
- SBC—single board computer
3.3. Associated Flight Method
- I.
- Lifting the aircraft from the ground by increasing the speed of the four engines, the propulsion force being greater than the weight.
- II.
- Keeping the UAV at a fixed point by equalizing the two forces (propulsive force with weight).
- III.
- Reducing the speed of the front engines, the UAV starts to bank, the propulsion force breaks down into two components (vertical and horizontal), and the stall speed starts to increase.
- IV.
- The wings take their angle of incidence from negative to positive to achieve lift on their surface.
- V.
- Due to the appearance of lift force, the sum of it and the vertical component of the propulsive force component must be equal to the weight, so the speed of the engines should decrease; but this is avoided, and the engines will be directed at a certain angle with the direction of travel so that altitude remains constant, which increases forward speed compared to a classic quadcopter. The graphical representation of these five steps is presented in Figure 9.
3.4. Theoretical Performance Evaluation
3.4.1. Hover Flight
- -
- Current intensity per motor during hover is 44.7032 A
- -
- The total current consumed by the UAV during the hover was 178.8129 A
- -
- The power consumed by a motor during hover was 755.3243 W
- -
- The total power consumed by the drone during hover was 3021.3 W
- -
- Engine speed during hover was 11 152 rpm
- -
- PWM percentage during hover was 52.88%
3.4.2. Flight Simulation for Conventional Quadcopter
- -
- Motor PWM percentage: 54.66%
- -
- Travel time of the route: 6093 min
- -
- Maximum travel speed: 99.99 km/h
- -
- Power of a motor: 803.40 W
- -
- Total motor power: 3213.6 W
- -
- Energy consumption following the route: 19198 mAh
- -
- Percentage consumed from the battery is: 59.99%
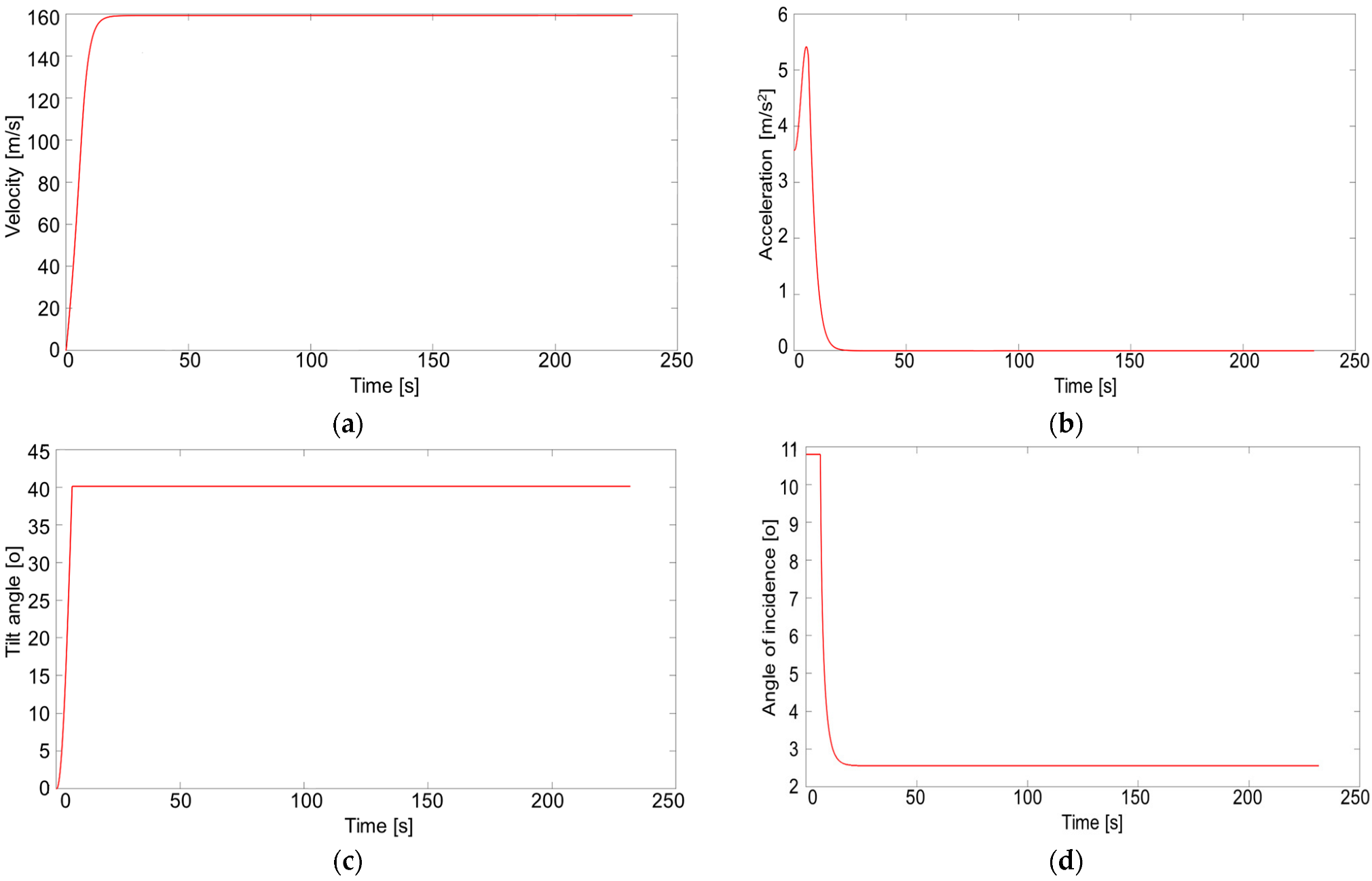
3.4.3. UAV Concept’s Flight with Increased Maximum Speed
- -
- Time to complete the route: 3.86 min
- -
- Maximum speed reached: 159.21 km/h
- -
- Power per motor: 803.40 W
- -
- Total power consumed by the engine: 3213.6 W
- -
- Energy consumption to complete the route: 12162 mAh
- -
- Percentage consumed from the battery: 38%
4. Discussion
- Vertical takeoff/landing.
- Allows the transport of a high-capacity payload.
- It has vectorized propulsion.
- It has increased flight autonomy due to the generation of a lift force by the wings and the reduction of rotation per minute at the four motors.
- Increased maximum forward speed due to flight principle, as the motor thrust can be fully focused on the forward direction.
- Increased maneuverability because each wing is independently adjustable regarding incidence angle.
5. Conclusions
6. Patents
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Circular 328-AN/190, Unmanned Aircraft Systems (UAS); International Civil Aviation Organization: Montreal, QC, Canada, 2011; ISBN 978-92-9231-751-5.
- Federal Aviation Administration. Unmanned Aircraft Systems Operations in the U. S. National Airspace System. Interim Operational Approval Guidance 08-01; Federal Aviation Administration: Washington, DC, USA, 2008. [Google Scholar]
- European Aviation Safety Agency. Airworthiness Certification of Unmanned Aircraft Systems (UAS). Policy Statement, E.Y013-01; European Aviation Safety Agency: Cologne, Germany, 2009. [Google Scholar]
- Dalamagkidis, K. Aviation History and Unmanned Flight. In Handbook of Unmanned Aerial Vehicles; Valavanis, K.P., Vachtsevanos, G.J., Eds.; Springer Scicence +Business Media: Dordrecht, The Nederlands, 2015; pp. 57–81. [Google Scholar] [CrossRef]
- Dalamagkidis, K. Clasification of UAVs. In Handbook of Unmanned Aerial Vehicles; Valavanis, K.P., Vachtsevanos, G.J., Eds.; Springer Scicence +Business Media: Dordrecht, The Nederlands, 2015; pp. 83–91. [Google Scholar] [CrossRef]
- Fahlstrom, P.G.; Gleason, T.J. Classes and Missions of UAVs, Part I. In Introduction to UAV Systems, 4th ed.; John Wiley & Sons, Ltd.: Chichester, UK, 2022; pp. 16–31. [Google Scholar]
- Restas, A. Drone Applications Fighting COVID-19 Pandemic-Towards Good Practices. Drones 2022, 6, 15. [Google Scholar] [CrossRef]
- Castrillo, V.U.; Manco, A.; Pascarella, D.; Gigante, G. A Review of Conter-UAS Technologies for Cooperative Defensive Teams of Drones. Drones 2022, 6, 65. [Google Scholar] [CrossRef]
- Hyun, C.-U.; Park, M.; Lee, W.Y. Remotely Piloted Aircraft System (RPAS)-Based Wildlife Detection: A Review and Case Studies in Maritime Antarctica. Animals 2020, 10, 2387. [Google Scholar] [CrossRef]
- Harris, C.M.; Herata, H.; Herte, F. Environmental guidelines for operation of Remotely Piloted Aircraft Systems (RPAS): Experience from Antarctica-Review. Biol. Conserv. 2019, 236, 521–531. [Google Scholar] [CrossRef]
- Bollard, B.; Doshi, A.; Gilbert, N.; Poirot, C.; Gillman, L. Drone Technology for Monitoring Protected Areas in Remote and Fragile Environments. Drones 2022, 6, 42. [Google Scholar] [CrossRef]
- Filkin, T.; Sliusar, N.; Ritzkowski, M.; Huber-Humer, M. Unmanned Aerial Vehicles for Operational Monitoring of Landfills. Drones 2021, 5, 125. [Google Scholar] [CrossRef]
- Furukawa, F.; Laneng, L.A.; Ando, H.; Yoshimura, N.; Kaneko, M.; Morimoto, J. Comparison of RGB and MultiSpectral Unmanned Aerial Vehicle for Monitoring vegetation Coverage Changes on a Landslide Area. Drones 2021, 5, 97. [Google Scholar] [CrossRef]
- Dalla Corte, A.P.; da Cunha Neto, E.M.; Rex, F.E.; Souza, D.; Behling, A.; Mohan, M.; Sanquetta, M.N.I.; Silva, C.A.; Klauberg, C.; Sanquetta, C.R.; et al. High-Density UAV-LiDAR in an Integrated Crop-Live-Forest System: Sampling Forest Inventory or Forest Inventory Based on Individual Tree Detection (ITD). Drones 2022, 6, 48. [Google Scholar] [CrossRef]
- Ezat, M.A.; Fritsch, C.J.; Downs, C.T. Use of an unmanned aerial vehicle (drone) to survey Nile crocodile populations: A case study at Lake Nyamithi, Ndumo game reserve, South Africa. Biol. Conserv. 2018, 223, 76–81. [Google Scholar] [CrossRef]
- Mulero-Pázmány, M.; Stolper, R.; van Essen, L.D.; Negro, J.J.; Sassen, T. Remotely piloted aircraft systems as a rhinoceros anti-poaching tool in Africa. PLoS ONE 2014, 9, e83873. [Google Scholar] [CrossRef] [PubMed]
- Rey, N.; Volpi, M.; Joost, S.; Tuia, D. Detecting animals in African Savanna with UAVs and the crowds. Remote Sens. Environ. 2017, 200, 341–351. [Google Scholar] [CrossRef]
- Ubina, N.A.; Cheng, S.C. A Review of Unmanned System Technologies with Its Application to Aquaculture Farm Monitoring and Management. Drones 2022, 6, 12. [Google Scholar] [CrossRef]
- Rahaman, S.A.; Urmee, T.; Parlevliet, D.A. PV system defects identification using Remotely Piloted Aircraft (RPA) based infrared (IR) imaging: A review. Solar Energy 2020, 206, 579–595. [Google Scholar] [CrossRef]
- Wildmann, N.; Bernard, S.; Bange, J. Measuring the local wind field at an escarpment using small remotely-piloted aircraft. Renew. Energy 2017, 103, 613–619. [Google Scholar] [CrossRef]
- Barnetson, J.; Phinn, S.; Scarth, P. Mapping woody vegetation cover across Australia’s arid rangelands: Utilising a machine-learning classification and low-cost Remotely Piloted Aircraft System. Int. J. Appl. Earth Obs. Geoinform. 2019, 83, 101909. [Google Scholar] [CrossRef]
- Vitale, V. The case of the middle valley of the Sinni (Southern Basilicata). Methods of archaeological and architectural documentation: 3D photomodelling techniques and use of RPAS. Digit. Appl. Archaeol. Cult. Herit. 2018, 11, e00084. [Google Scholar] [CrossRef]
- Contreras-de-Villar, F.; García, F.J.; Muñoz-Perez, J.J.; Contreras-de-Villar, A.; Ruiz-Ortiz, V.; Lopez, P.; Garcia-López, S.; Jigena, B. Beach Leveling Using a Remotely Piloted Aircraft System (RPAS): Problems and Solutions. J. Mar. Sci. Eng. 2021, 9, 19. [Google Scholar] [CrossRef]
- Vroegindeweij, B.A.; van Wijk, S.W.; van Henten, E. Autonomous unmanned aerial vehicles for agricultural applications. In Proceedings of the Ag Eng 2014, Zurich, Switzerland, 6–10 July 2014. [Google Scholar]
- Pino, E. Los drones una herramienta para una agricultura eficiente: Un futuro de alta tecnología. Idesia 2019, 37, 75–84. [Google Scholar] [CrossRef]
- Nettis, A.; Saponaro, M.; Nanna, M. RPAS-Based Framework for Simplified Seismic Risk Assessment of Italian RC-Bridges. Buildings 2020, 10, 150. [Google Scholar] [CrossRef]
- European Drones Outlook Study, Unlocking the Value for Europe. 2016. Available online: https://www.sesarju.eu/sites/default/files/documents/reports/European_Drones_Outlook_Study_2016.pdf (accessed on 21 February 2023).
- Rostami, M.; Farajollahi, A. Aerodynamic performance of mutual interaction tandem propellers with ducted UAV. Aerosp. Sci. Technol. 2021, 108, 106399. [Google Scholar] [CrossRef]
- Jiang, J.; Liu, H.; Yuan, B.; Wang, X.; Liang, B. A New Concept of UAV Recovering System. In Intelligent Robotics and Applications, ICRA 2019; Yu, H., Liu, J., Liu, L., Ju, Z., Liu, Y., Zhou, D., Eds.; Lecture Notes in Computer Science; Springer: Cham, Switerland, 2019; Volume 11742. [Google Scholar] [CrossRef]
- Tyan, M.; Nguyen, N.V.; Kim, S.; Lee, J.W. Comprehensive preliminary sizing/resizing method for a fixed wing—VTOL electric UAV. Aerosp. Sci. Technol. 2017, 71, 30–41. [Google Scholar] [CrossRef]
- Tielin, M.; Chuanguang, Y.; Wenbiao, G.; Zihan, X.; Qinling, Z.; Xiaoou, Z. Analysis of technical characteristics of fixed-wing VTOL UAV. In Proceedings of the 2017 IEEE International Conference on Unmanned Systems (ICUS), Beijing, China, 27–29 October 2017; pp. 293–297. [Google Scholar] [CrossRef]
- Aktas, Y.O.; Ozdemir, U.; Dereli, Y.; Tarhan, A.F.; Cetin, A.; Vuruskan, A.; Yuksek, B.; Cengiz, H.; Basdemir, S.; Ucar, M.; et al. Rapid Prototyping of a Fixed-Wing VTOL UAV for Design Testing. J. Intell. Robot. Syst. 2016, 84, 639–664. [Google Scholar] [CrossRef]
- Zaladin, Z.; Harituddin, A.S.M. Challenges and Trends of Hover to Forward Flight for a Converted Hybrid Fixed Wing VTOL UAS for Automatic Flight Control System Perspective. In Proceedings of the 2019 IEEE 9th International Conference on System Engineering and Technology (ICSET), Shah Alam, Malaysia, 7 October 2019; pp. 247–252. [Google Scholar] [CrossRef]
- Cetinsoy, E.; Dikyar, S.; Hancer, C.; Oner, K.T.; Sirimoglu, E.; Unel, M.; Aksit, M.F. Design and Construction of a Novel Quad Tilt-Wing UAV. Mechatronics 2012, 22, 723–745. [Google Scholar] [CrossRef]
- Hancer, C.; Oner, K.T.; Sirimoglu, E.; Cetinsoy, E.; Unel, M. Robust hovering control of a Quad Tilt-Wing UAV. In Proceedings of the 36th Annual Conference on IEEE Industrial Electronics Society (IECON 2010), Glendale, AZ, USA, 7–10 November 2010. [Google Scholar]
- Mikami, T.; Uchiyama, K. Design of Flight Control System for Quad Tilt-Wing UAV. In Proceedings of the 2015 International Conference on Unmanned Aircraft Systems, Denver, CO, USA, 9–12 June 2015. [Google Scholar]
- Kimura, G.; Furuya, M.; Yasuda, K.; Hirabayashi, D. Transportation System of QTW (Quad Tilt Wing)-UAV (Unmanned Aerial Vehicle). Trans. Logist. Conf. 2007, 16, 121–122. [Google Scholar]
- Lavangen, G.; Mari Mari, M.; Benatar, Y.; Barse, T. Drone Comprising Lift-Producting Wings. U.S. Patent Application. US 2017/0361927 A1, 21 December 2017. [Google Scholar]
- Chinese Patent Application. CN108438215A, 2018. Available online: https://patents.google.com/patent/CN108438215A/en?oq=CN+108438215+A (accessed on 21 February 2023).
- Micros, I. Drone with four Wings Maneuverable by Flapping Action. U.S. Patent Application. US 2019/0023392 A1, 7 January 2020. [Google Scholar]
- Frigioescu, T.F.; Badea, T.A.; Condruz, M.R.; Cican, G.; Mindru, I. Design and Development of a Remote-Control Test Bench for Remote Piloted Aircraft’s Brushless Motors. Tech. Gaz. 2023, 30. in press. [Google Scholar]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Velocity [m/s] | 10 | 20 | 10 | 20 | 10 | 20 | 10 | 20 | 10 | 20 |
|---|---|---|---|---|---|---|---|---|---|---|
| Angle of Incidence [°] | 0 | 3.53 | 7.05 | 10.55 | 14 | |||||
| Lift [N] | 0.42 | 1.51 | 0.82 | 3.14 | 1.26 | 4.92 | 1.73 | 6.80 | 2.20 | 8.72 |
| Drag [N] | 0.07 | 0.28 | 0.11 | 0.43 | 0.18 | 0.71 | 0.28 | 1.13 | 0.43 | 1.16 |
| Total lift [N] | 1.68 | 6.05 | 3.28 | 12.54 | 5.05 | 19.67 | 6.91 | 27.18 | 8.79 | 34.90 |
| Total drag [N] | 0.29 | 1.13 | 0.44 | 1.73 | 0.71 | 2.83 | 1.13 | 4.52 | 1.70 | 4.63 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Frigioescu, T.-F.; Condruz, M.R.; Badea, T.A.; Paraschiv, A. A Preliminary Study on the Development of a New UAV Concept and the Associated Flight Method. Drones 2023, 7, 166. https://doi.org/10.3390/drones7030166
Frigioescu T-F, Condruz MR, Badea TA, Paraschiv A. A Preliminary Study on the Development of a New UAV Concept and the Associated Flight Method. Drones. 2023; 7(3):166. https://doi.org/10.3390/drones7030166
Chicago/Turabian StyleFrigioescu, Tiberius-Florian, Mihaela Raluca Condruz, Teodor Adrian Badea, and Alexandru Paraschiv. 2023. "A Preliminary Study on the Development of a New UAV Concept and the Associated Flight Method" Drones 7, no. 3: 166. https://doi.org/10.3390/drones7030166
APA StyleFrigioescu, T.-F., Condruz, M. R., Badea, T. A., & Paraschiv, A. (2023). A Preliminary Study on the Development of a New UAV Concept and the Associated Flight Method. Drones, 7(3), 166. https://doi.org/10.3390/drones7030166