
Commonality Evaluation and Prediction Study of Light and Small Multi-Rotor UAVs


Abstract
:1. Introduction
2. Commonality Quantification Method
3. Light and Small Multi-Rotor UAV Commonality Evaluation Model
3.1. Light and Small Multi-Rotor UAV Product Breakdown Structure
3.2. UAV Design Structure Matrix
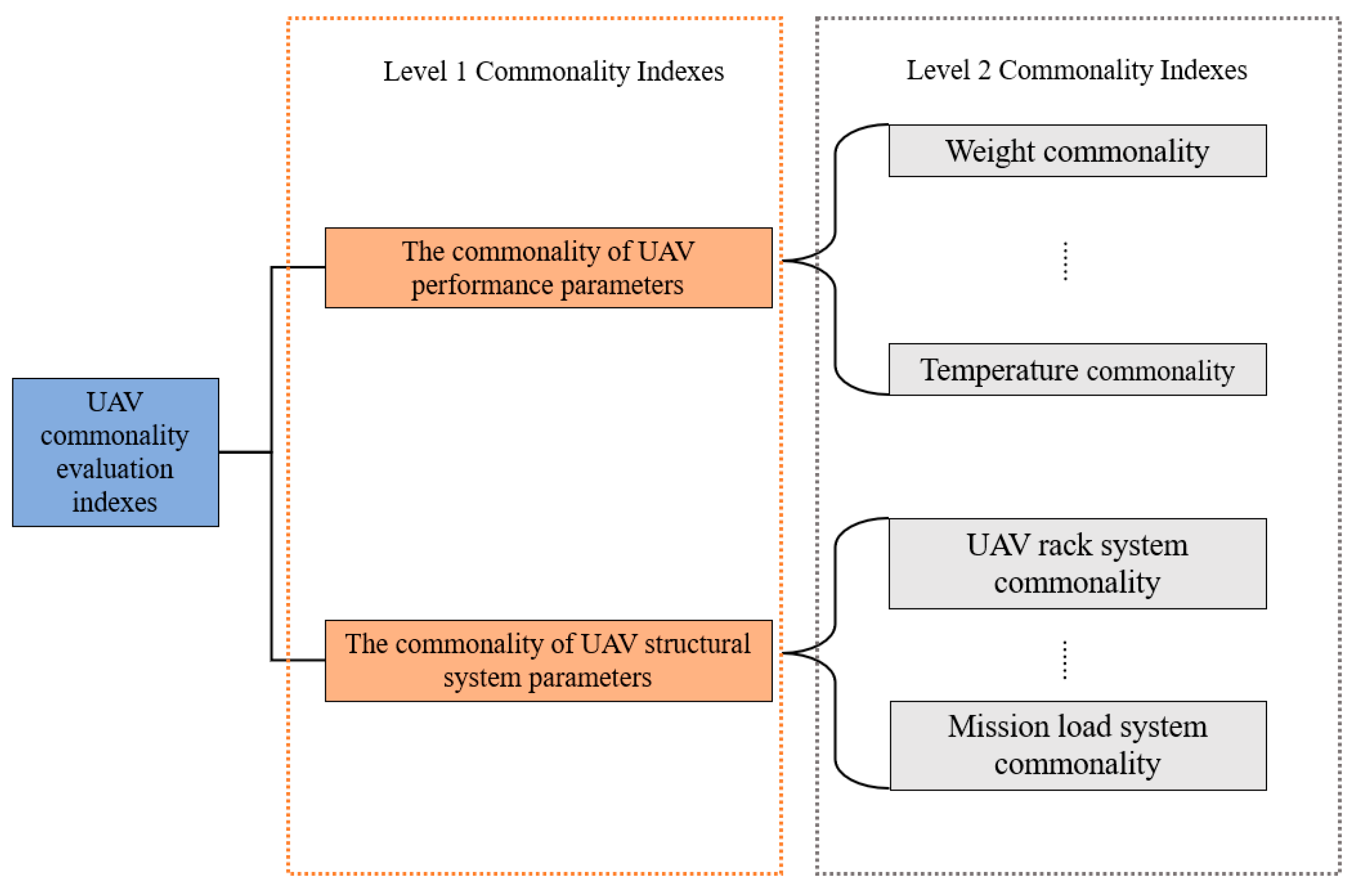
3.3. UAV Commonality Evaluation Indexes
3.4. UAV Commonality Calculation
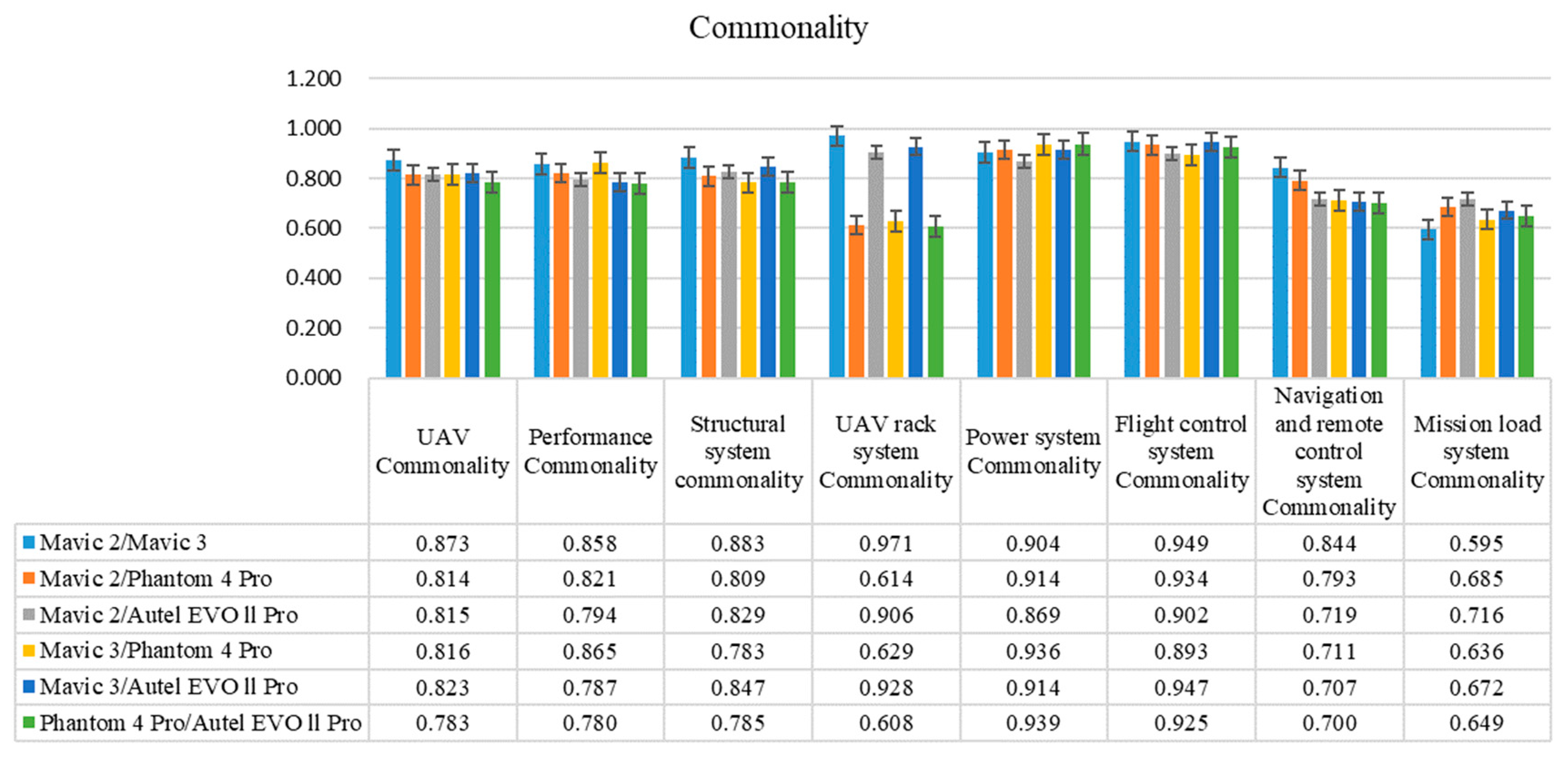
3.5. Case Calculation
4. The Prediction Model Based on Convolutional Neural Networks for the Commonality of Light and Small Multi-Rotor UAVs
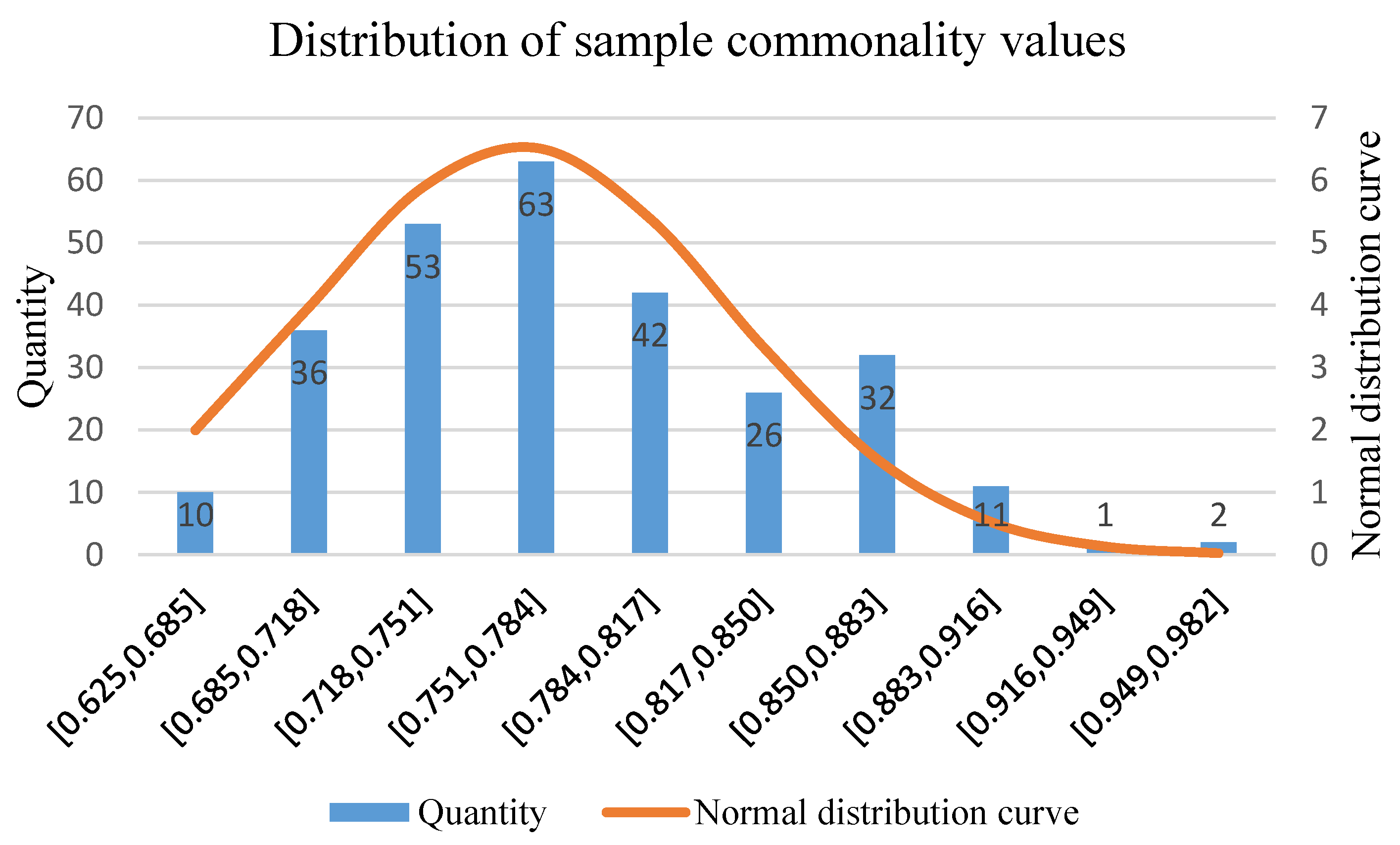
4.1. Data Collection and Cleaning
4.2. Constructing the Dataset
4.3. Convolutional Neural Network Model Building
4.4. Experimental Results and Analysis
4.5. Test Cases
5. Summary and Outlook
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Nomenclature
| X, Y | data of a set of comparison samples |
| Minkowski distance | |
| maximum possible Minkowski distance between X and Y | |
| Cosine similarity | |
| value of commonality evaluation | |
| DSM | design structure matrix |
| comprehensive connection strength of the DSM cell (i, j) | |
| spatial connection strength of the DSM cell (i, j) | |
| energy connection strength of the DSM cell (i, j) | |
| information connection strength of the DSM cell (i, j) | |
| material connection strength of the DSM cell (i, j) | |
| CNN | convolutional neural network |
| MRE | mean relative error |
| RMSE | root mean square error |
| R2 | goodness of fit |
References
- Valavanis, K.P.; Vachtsevanos, G.J. Handbook of Unmanned Aerial Vehicles; Springer: Berlin/Heidelberg, Germany, 2015; Volume 1. [Google Scholar]
- Ducard, G.J.; Allenspach, M. Review of designs and flight control techniques of hybrid and convertible VTOL UAVs. Aerosp. Sci. Technol. 2021, 118, 107035. [Google Scholar] [CrossRef]
- Jia, F.; Song, Y. UAV automation control system based on an intelligent sensor network. J. Sens. 2022, 2022, 7143194. [Google Scholar] [CrossRef]
- Haque, M.S.; Chowdhury, M.U. A new cyber security framework towards secure data communication for unmanned aerial vehicle (UAV). In Proceedings of the Security and Privacy in Communication Networks: SecureComm 2017 International Workshops, ATCS and SePrIoT, Proceedings 13, Niagara Falls, ON, Canada, 22–25 October 2017; pp. 113–122. [Google Scholar]
- Zhang, Y.; Yongqi, Z.; Kang, C.; Jiang, Y.; Liang, K. Commonality Benefit Analysis for Maintenance Technical Publications of Civil Aircraft Based on Learning Effect. Int. J. Aerosp. Eng. 2022, 2022, 5880391. [Google Scholar] [CrossRef]
- Natarajan, M.; Siddique, Z. Identifying common platform shape for a family of components. In Proceedings of the ASME International Mechanical Engineering Congress and Exposition, Anaheim, CA, USA, 13–19 November 2004; pp. 23–30. [Google Scholar]
- Blackenfelt, M. Profit maximisation while considering uncertainty by balancing commonality and variety using robust design: The redesign of a family of lift tables. In Proceedings of the International Design Engineering Technical Conferences and Computers and Information in Engineering Conference, Baltimore, MD, USA, 10–13 September 2000; pp. 49–56. [Google Scholar]
- Fujita, K.; Sakaguchi, H.; Akagi, S. Product variety deployment and its optimization under modular architecture and module commonalization. In Proceedings of the International Design Engineering Technical Conferences and Computers and Information in Engineering Conference, Las Vegas, NV, USA, 12–16 September 1999; pp. 337–348. [Google Scholar]
- Hölttä-Otto, K. Analyzing module commonality for platform design in functional and physical domain. In Proceedings of the International Design Engineering Technical Conferences and Computers and Information in Engineering Conference, Long Beach, CA, USA, 24–28 September 2005; pp. 383–391. [Google Scholar]
- Kim, J.; Saidani, M.; Kim, H.M. Optimal product family architecture design and commonality decision for sustaina-bility and intellectual property protection. In Proceedings of the ASME 2020 International Design Engineering Technical Conferences and Computers and Information in Engineering Conference, Virtual, Online, 17–19 August 2020. [Google Scholar]
- Nuffort, M.R. Managing Subsystem Commonality. Ph.D. Thesis, Massachusetts Institute of Technology, Cambridge, MA, USA, 2001. [Google Scholar]
- Bador, D.D.P.M.D. Improving Commonality Implementation in the Cockpits of Commercial Aircraft. Ph.D. Thesis, Massachusetts Institute of Technology, Cambridge, MA, USA, 2007. [Google Scholar]
- Xi, H.; Xue, Z.; Han, X. Analysis and research on commonality of civil aircraft air management systems. Technol. Vis. 2017, 243–244. [Google Scholar] [CrossRef]
- Cai, X.; Lei, X.; Kuang, Q.; Wang, Y.; Li, X. Analysis and database development of common design elements of civil aircraft cockpit. Mod. Electron. 2022, 45, 38–42. [Google Scholar]
- Zhang, Y.; Li, X.; Qing, X. Research on the common system architecture of civil aircraft operation support. Aviat. Maint. Eng. 2022, 66–72. [Google Scholar] [CrossRef]
- Cabaleiro de la Hoz, C.; Bussemaker, J.H.; Fioriti, M.; Boggero, L.; Ciampa, P.D.; Nagel, B. Environmental and flight control system architecture optimization from a family concept design perspective. In Proceedings of the AIAA Aviation 2020 Forum, Virtual, Online, 15–19 June 2020; p. 3113. [Google Scholar]
- Thevenot, H.J.; Simpson, T.W. A comprehensive metric for evaluating component commonality in a product family. J. Eng. Des. 2007, 18, 577–598. [Google Scholar] [CrossRef]
- Thevenot, H.J.; Simpson, T.W. Commonality indices for product family design: A detailed comparison. J. Eng. Des. 2006, 17, 99–119. [Google Scholar] [CrossRef]
- Zhang, Y.; Zheng, Y.; Xianchao, M.; Wenjun, D.; Dayong, D.; Zhaoguang, T.; Zhang, S. Exploration and implementation of commonality valuation method in commercial aircraft family design. Chin. J. Aeronaut. 2019, 32, 1828–1846. [Google Scholar] [CrossRef]
- Chowdhury, S.; Messac, A.; Khire, R. Comprehensive product platform planning (CP3) using mixed-discrete particle swarm optimization and a new commonality index. In Proceedings of the International Design Engineering Technical Conferences and Computers and Information in Engineering Conference, Chicago, IL, USA, 12–15 August 2012; pp. 983–999. [Google Scholar]
- Thevenot, H.J.; Nanda, J.; Simpson, T.W. A methodology to support product family redesign using genetic algorithm and commonality indices. In Proceedings of the International Design Engineering Technical Conferences and Computers and Information in Engineering Conference, Long Beach, CA, USA, 24–28 September 2005; pp. 1009–1018. [Google Scholar]
- Takai, S. An approach to integrate commonality and product family design with inventory decisions. J. Mech. Des. 2019, 141, 031704. [Google Scholar] [CrossRef]
- Yongjie, Z.; Yongqi, Z.; Kang, C.; Zheng, Y.; Wenjun, D.; Dayong, D. A review of commonality design for civil aircraft. In Proceedings of the 2021 12th International Conference on Mechanical and Aerospace Engineering (ICMAE), Athens, Greece, 16–19 July 2021; pp. 119–124. [Google Scholar]
- Ganesan, R.; Raajini, X.M.; Nayyar, A.; Sanjeevikumar, P.; Hossain, E.; Ertas, A.H. Bold: Bio-inspired optimized leader election for multiple drones. Sensors 2020, 20, 3134. [Google Scholar] [CrossRef] [PubMed]
- Li, J.; Long, B.; Wu, H.; Hu, X.; Wei, X.; Zhang, Z.; Chai, L.; Xie, J.; Mei, H. Rapid evaluation model of endurance performance and its application for agricultural UAVs. Drones 2022, 6, 186. [Google Scholar] [CrossRef]
- Zhang, J.; An, Y.; Cao, J.; Ouyang, S.; Wang, L. UAV trajectory planning for complex open storage environments based on an im-proved rrt algorithm. IEEE Access 2023, 11, 23189–23204. [Google Scholar] [CrossRef]
- Li, T.; Li, S.; Sun, H.; Lv, D. The fixed-time observer-based adaptive tracking control for aerial flexible-joint robot with input saturation and output constraint. Drones 2023, 7, 348. [Google Scholar] [CrossRef]
- Daya, F.J.; Sanjeevikumar, P.; Blaabjerg, F.; Wheeler, P.W.; Olorunfemi Ojo, J.; Ertas, A.H. Analysis of wavelet controller for robustness in electronic differential of electric vehicles: An investigation and numerical developments. Electr. Power Compon. Syst. 2016, 44, 763–773. [Google Scholar] [CrossRef]
- Ding, M.; Tang, L.; Zhou, L.; Wang, X.; Weng, Z.; Qu, J. W band mini-SAR on multi rotor UAV platform. In Proceedings of the 2019 IEEE 2nd International Conference on Electronic Information and Communication Technology (ICEICT), Harbin, China, 20–22 January 2019; pp. 416–418. [Google Scholar]
- Steward, D.V. The design structure system: A method for managing the design of complex systems. IEEE Trans. Eng. Manag. 1981, EM-28, 71–74. [Google Scholar] [CrossRef]
- Sosa, M.E.; Eppinger, S.D.; Rowles, C.M. Identifying modular and integrative systems and their impact on design team interactions. J. Mech. Des. 2003, 125, 240–252. [Google Scholar] [CrossRef]
- Sharman, D.M.; Yassine, A.A. Characterizing complex product architectures. Syst. Eng. 2004, 7, 35–60. [Google Scholar] [CrossRef]
- Zhang, Y.; Cao, K.; Liang, K.; Zeng, Y. Study on the evaluation model of serialized civil aircraft commonality index based on fuzzy set theory. J. Intell. Fuzzy Syst. 2021, 40, 11539–11558. [Google Scholar] [CrossRef]
- Hang, L. Machine Learning Methods; Tsinghua University Press: Beijing, China, 2022. [Google Scholar]
- Roth, H.R.; Lu, L.; Liu, J.; Yao, J.; Seff, A.; Cherry, K.; Kim, L.; Summers, R.M. Efficient false positive reduction in computer-aided detection using convolutional neural networks and random view aggregation. In Deep Learning and Convolutional Neural Networks for Medical Image Computing: Precision Medicine, High Performance and Large-Scale Datasets; Springer: Cham, Switzerland, 2017; pp. 35–48. [Google Scholar]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Graduations | Representation | Meaning |
|---|---|---|
| 3 | High | High connection strength |
| 2 | Medium | Medium connection strength |
| 1 | Low | Low connection strength |
| 0 | None | No connection |
| Level 1 Indexes | Level 2 Indexes | Evaluation of Characteristic Variables | |
|---|---|---|---|
| The commonality of UAV performance parameters | Weight | Body weight (g) | |
| Maximum load weight (g) | |||
| Speed | Ascent speed | Maximum ascent speed in sports gear (m/s) | |
| Maximum ascent speed in normal gear (m/s) | |||
| Maximum ascent speed in smooth gear (m/s) | |||
| Descent rate | Maximum descent speed in sports gear (m/s) | ||
| Maximum descent speed in normal gear (m/s) | |||
| Maximum descent speed in smooth gear (m/s) | |||
| Horizontal flight speed | Maximum horizontal flight speed in sports gear (m/s) | ||
| Maximum horizontal flight speed in normal gear (m/s) | |||
| Maximum horizontal flight speed in smooth gear (m/s) | |||
| Tilt angle | Maximum tilt angle of sports gear (°) | ||
| Maximum tilt angle of normal gear (°) | |||
| Maximum tilt angle of smooth gear (°) | |||
| Flight time | Maximum endurance (min) | ||
| Maximum take-off altitude | Altitude (km) | ||
| Wind resistance | Wind resistance class | ||
| Temperature | Minimum temperature (°C) | ||
| Maximum temperature (°C) | |||
| Level 1 Indexes | Level 2 Indexes | Level 3 Indexes | Evaluation of Characteristic Variables | |
|---|---|---|---|---|
| The commonality of UAV structural system parameters | UAV rack system commonality | Fuselage | Length of fuselage unfolding (mm) | |
| Width of fuselage unfolding (mm) | ||||
| Height of fuselage unfolding (mm) | ||||
| Wheelbase (mm) | ||||
| Length of fuselage folding (mm) | ||||
| Width of fuselage folding (mm) | ||||
| Height of fuselage folding (mm) | ||||
| UAV arm and landing gear | Number of arms | |||
| Arm Mounting | Foldable | |||
| Non-foldable | ||||
| Landing gear layout | Bottom support layout | |||
| Connection arm layout | ||||
| Power system commonality | Battery | Battery Capacity (mAh) | ||
| Voltage (V) | ||||
| Energy (Wh) | ||||
| Weight (g) | ||||
| Charging power (W) | ||||
| Motors and ESCs | Maximum ascent speed (m/s) | |||
| Maximum descent speed (m/s) | ||||
| Maximum horizontal flight speed (m/s) | ||||
| Maximum take-off altitude (km) | ||||
| Propeller | Number of propeller blades | |||
| Total number of propellers | ||||
| Propeller mounting position | Upward | |||
| Downward | ||||
| Flight control system commonality | Flight control, IUM, perception system | Perception system arrangement | Front-end Perception | |
| Rear Perception | ||||
| Lower Perception | ||||
| Upper Perception | ||||
| Lateral Perception | ||||
| Hovering accuracy | Vertical direction (m) | |||
| Horizontal direction (m) | ||||
| Maximum tilt angle (°) | ||||
| Maximum wind resistance class | ||||
| Navigation and remote control systems commonality | GNSS | GPS | ||
| GLONASS | ||||
| Galileo | ||||
| BeiDou | ||||
| Navigation and remote control systems commonality | Graphical/Digital transmission/Receiver | Operating frequency | 2.4 GHz | |
| 5 GHz | ||||
| Data interface type | Lightning | |||
| Micro USB | ||||
| Type-C | ||||
| HDMI | ||||
| Signal effective distance (km) | FCC Distance | |||
| CE Distance | ||||
| MIC Distance | ||||
| SRRC distance | ||||
| Maximum bit rate (Mbps) | ||||
| Delay (ms) | ||||
| Remote control | Battery capacity (mAh) | |||
| Operating current (mA) | ||||
| Operating voltage (V) | ||||
| Mission load system commonality | Cloud terrace | Stabilization system (number of axes) | ||
| Maximum control speed (°/s) | ||||
| Amount of angular jitter (°) | ||||
| Head structure design range (°) | Pitch angle | |||
| Rolling angle | ||||
| Yaw angle | ||||
| Controllable rotation range (°) | Pitch angle | |||
| Rolling angle | ||||
| Yaw angle | ||||
| Camera | Pixel size (million) | |||
| Maximum video bit rate (Mb/s) | ||||
| Lens angle of view (°) | ||||
| Lens focal length (mm) | ||||
| Lens aperture (f/X) | ||||
| Maximum photo size | Long (PX) | |||
| Width (PX) | ||||
| Video resolution | HD | |||
| FHD | ||||
| 2.7 K | ||||
| 4 K | ||||
| Larger than 4 K | ||||
| Mounting device | Presence of mountings | |||
| No mountings | ||||
| Evaluation of Characteristic Variables | Model 1 | Model 2 | Formula 4 Calculation | Formula 6 Calculation | Commonality |
|---|---|---|---|---|---|
| Pixel size (million) | 2000 | 2000 | 0.998 | \ | 0.874 |
| Maximum video bit rate (Mb/s) | 120 | 100 | |||
| Lens angle of view (°) | 82 | 77 | |||
| Lens focal length (mm) | 28.6 | 28 | |||
| Lens aperture (f/X) | 11 | 11 | |||
| Long | 5472 | 5472 | |||
| wide | 3648 | 3648 | |||
| HD | 0 | 0 | \ | 0.750 | |
| FHD | 1 | 1 | |||
| 2.7 K | 1 | 1 | |||
| 4 K | 1 | 1 | |||
| Larger than 4 K | 1 | 0 |
| Weight | Speed | Tilt Angle | Endurance Time | Take-Off Altitude | Wind Resistance | Operating Temperature | |
|---|---|---|---|---|---|---|---|
| Fuselage | 3 | 1 | 1 | ||||
| Arm | 2 | 1 | 1 | ||||
| Landing gear | 2 | ||||||
| Battery | 3 | 1 | 3 | 2 | 3 | ||
| Motor | 2 | 3 | 2 | ||||
| ESC | 1 | 2 | 1 | ||||
| Propeller | 1 | 3 | 2 | 2 | |||
| Flight Control | 1 | 2 | 3 | 3 | |||
| IMU | 1 | 3 | 2 | ||||
| Perception System | 1 | ||||||
| GNSS | 1 | ||||||
| Graphical/Digital transmission | 1 | ||||||
| Receiver | 1 | ||||||
| Remote Control | |||||||
| Cloud Terrace | 1 | 1 | |||||
| Camera | 1 | 1 | |||||
| Σ | 23 | 11 | 9 | 7 | 6 | 7 | 4 |
| Weights | 0.343 | 0.164 | 0.134 | 0.105 | 0.09 | 0.104 | 0.06 |
| Performance Commonality (0.4) | Structural System Commonality (0.6) | ||||
|---|---|---|---|---|---|
| Weight (0.343) Speed (0.164) Tilt angle (0.134) Endurance time (0.105) Take-off altitude (0.09) Wind resistance (0.104) Operating temperature (0.06) | UAV rack system (0.186) | Power system (0.245) | Flight control system (0.212) | Navigation and remote control system (0.268) | Mission load system (0.088) |
| Fuselage (0.614) Arm and landing gear (0.386) | Battery (0.400) Motor and ESC (0.520) Propeller (0.080) | Flight control, IUM, Perception system (1) | GNSS (0.146) Graphical/Digital transmission/Receiver (0.561) Remote control (0.293) | Cloud terrace (0.370) Camera (0.519) Mounted devices (0.013) | |
| UAV Brands | DJI | Autel | Hubsan | Parrot |
|---|---|---|---|---|
| Number of models | 16 | 3 | 3 | 2 |
| General Design Features of UAV | UAV Performance Characteristics |
|---|---|
| Body weight Number of arms Fuselage spread length Width of fuselage spread Fuselage unfolded high Wheelbase | Maximum ascent speed Maximum descent speed Maximum horizontal flight speed Maximum tilt angle Maximum flight time Maximum takeoff altitude Wind resistance class Battery capacity Longest data transmission distance Camera pixels |
| Layer | Type | Parameters | Neurons | Output |
|---|---|---|---|---|
| 1 | Input layer | 16 × 2 × 1 | ||
| 2 | Convolutional layer | 2 × 2 convolution kernel | 256 | 15 × 1 × 256 |
| 3 | Batch normalization layer | 15 × 1 × 256 | ||
| 4 | Relu layer | 15 × 1 × 256 | ||
| 5 | Convolutional layer | 3 × 1 convolution kernel | 128 | 13 × 1 × 128 |
| 6 | Batch normalization layer | 13 × 1 × 128 | ||
| 7 | Relu layer | 13 × 1 × 128 | ||
| 8 | Convolutional layer | 3 × 1 convolution kernel | 128 | 11 × 1 × 128 |
| 9 | Batch normalization layer | 11 × 1 × 128 | ||
| 10 | Relu layer | 11 × 1 × 128 | ||
| 11 | Dropout layer | 0.2 | 11 × 1 × 128 | |
| 12 | Fully connected layer | 1 × 1 × 1 | ||
| 13 | Regression output layer | 1 × 1 × 1 |
| Optimization Algorithm | Adam |
|---|---|
| MiniBatchSize | 100 |
| MaxEpochs | 800 |
| InitialLearnRate | 0.001 |
| LearnRateDropFactor | 0.1 |
| Shuffle | Yes |
| Training Set | Test Set | |
|---|---|---|
| MRE | 0.0193 | 0.0322 |
| RMSE | 0.0239 | 0.0271 |
| R2 | 0.8535 | 0.7981 |
| General Design Features | Value | UAV Performance Features | Value |
|---|---|---|---|
| Maximum take-off weight (g) | 1000 | Maximum ascent speed (m/s) | 9 |
| Number of arms | 4 | Maximum descent speed (m/s) | 7 |
| Length of fuselage unfolding (mm) | 380 | Maximum horizontal flight speed (m/s) | 25 |
| Width of fuselage unfolding (mm) | 300 | Maximum tilt angle (°) | 40 |
| Height of fuselage unfolding (mm) | 120 | Maximum flight time (min) | 40 |
| Wheelbase (mm) | 400 | Maximum take-off altitude (km) | 6 |
| Wind resistance class | 6 | ||
| Battery capacity (Ah) | 4.5 | ||
| Maximum transmission distance (km) | 7 | ||
| Camera Pixels (millions) | 4.8 | ||
| Target Model | Benchmark Models | Commonality (%) | Target Model | Benchmark Models | Commonality (%) |
|---|---|---|---|---|---|
| Novel model | DJI Mini SE | 77.7 | Novel model | DJI Inspire 1 | 75.9 |
| DJI Mavic air | 76.9 | DJI M30 | 80.2 | ||
| DJI Mavic 2 | 87.0 | DJI M300 | 75.7 | ||
| DJI Mini 3 Pro | 79.8 | DJI M200 | 76.0 | ||
| DJI Mavic 3 | 89.9 | Autel EVO ll Pro | 82.4 | ||
| DJI Air 2S | 84.5 | Autel EVO ll Lite+ | 87.7 | ||
| DJI Mavic Air 2 | 84.9 | Autel EVO NANO | 79.4 | ||
| DJI Mini 2 | 79.4 | Habsen ACE pro | 80.9 | ||
| DJI Avata | 71.1 | Habsen zinomini SE | 78.5 | ||
| DJI FPV | 79.0 | Habsen zinomini pro | 78.0 | ||
| DJI Phantom 4 Pro | 83.2 | parrot ANAFI Ai | 80.1 | ||
| DJI Inspire 2 | 76.9 | parrot ANAFI-USA | 78.0 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, Y.; Zeng, Y.; Cao, K. Commonality Evaluation and Prediction Study of Light and Small Multi-Rotor UAVs. Drones 2023, 7, 698. https://doi.org/10.3390/drones7120698
Zhang Y, Zeng Y, Cao K. Commonality Evaluation and Prediction Study of Light and Small Multi-Rotor UAVs. Drones. 2023; 7(12):698. https://doi.org/10.3390/drones7120698
Chicago/Turabian StyleZhang, Yongjie, Yongqi Zeng, and Kang Cao. 2023. "Commonality Evaluation and Prediction Study of Light and Small Multi-Rotor UAVs" Drones 7, no. 12: 698. https://doi.org/10.3390/drones7120698
APA StyleZhang, Y., Zeng, Y., & Cao, K. (2023). Commonality Evaluation and Prediction Study of Light and Small Multi-Rotor UAVs. Drones, 7(12), 698. https://doi.org/10.3390/drones7120698