



A Multi-Regional Path-Planning Method for Rescue UAVs with Priority Constraints



Abstract
:1. Introduction
2. Mathematical Model of the HTSP-CPP
2.1. Problem Description
2.2. Problem Modelling
- Intra-regional paths
- b.
- Inter-regional paths
- c.
- Integer programming model of the HTSP-CPPConsider the following specific scenarios:
- In the case where the sensor’s sampling range can only cover region i, i.e., , meaning there is only one waypoint, , in region i, which coincides with the center of mass of region i. The UAV enters and exits region i from simultaneously. In other cases where , it is necessary to ensure that the UAV enters and exits region i from different points to avoid redundant path lengths.
- When there are multiple regions and each region has only one waypoint, i.e., N > 1, then the problem simplifies to the TSP.
- When there is only one region and its area exceeds the sampling range of the sensor, i.e., N = 1 and , the problem becomes a CPP problem with a starting point and an ending point.
3. Algorithm Design
- (1)
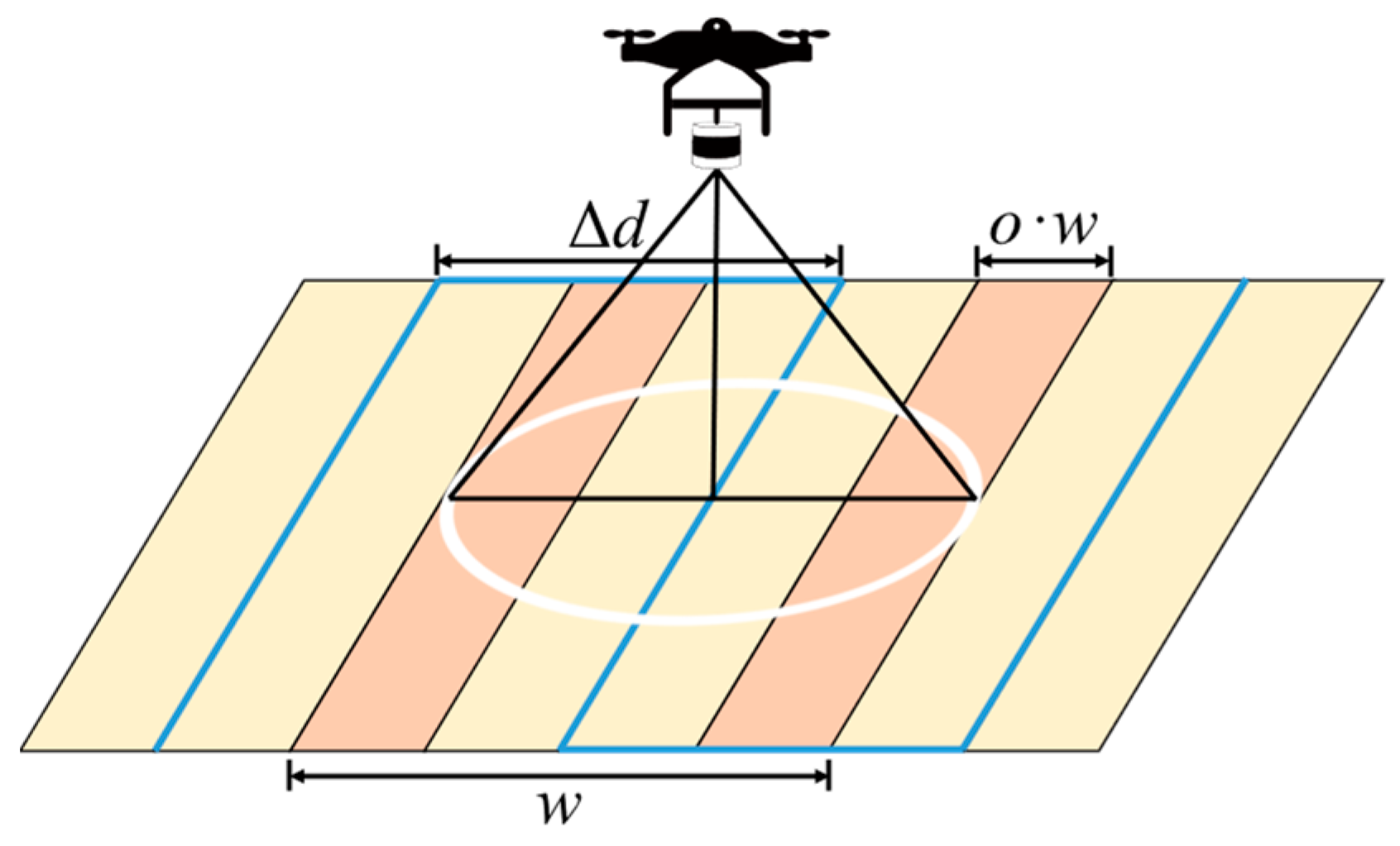
- Calculation of the inter-regional path and parameters: The initial step involves determining the optimal flight direction for the UAV within each convex polygonal region. This is achieved by calculating the width of the region. Simultaneously, the distance between flight paths is determined based on predefined sampling requirements. This information facilitates the generation of parallel flight lines within the region, subsequently yielding four potential candidate flight entry points;
- (2)
- Construction of the priority-constrained TSP: The algorithm designates both the center of each region and the depot as “cities” to be visited. This lays the foundation for formulating a traveling salesman problem with priority constraints. To compute the most efficient order of access, a heuristic algorithm is employed. This step aids in identifying the optimal sequence for visiting the designated cities;
- (3)
- Selection of optimal entry points and path generation: Utilizing the determined optimal access order, the algorithm proceeds to select the best entry points within each region. By amalgamating all selected waypoints, a coherent and comprehensive UAV path is formulated, which represents the final output of the algorithm.
3.1. Calculation of Inter-Regional Paths and Parameters
- Calculate the width of the convex polygon to determine the best flight direction of the UAV
- b.
- Dividing the region into strips along the width direction according to the distance between flight lines
- (1)
- When both edges of the strip intersect the polygon, generating two intersections, as illustrated in Figure 5a, the strip’s length is essentially the greater of the distances between the two intersections. Mathematically, the length of the strip is represented by ;
- (2)
- In instances where the strip is defined by a single edge that intersects with the polygon at two points, depicted in Figure 5b, the strip’s length equates to the distance between these two intersection points. This is succinctly expressed as ;
- (3)
- If a strip encompasses vertices within its scope, as illustrated in Figure 5c, the strip’s length is the shortest distance capable of covering the given vertex. This length is symbolized by .
- c.
- Generate candidate paths based on the four entry points
| Algorithm 1: getIntraWay (, , o) |
| Input: Regional parameter , sensor parameter , o Output: Complete collection of waypoints path, the path length in the region dist |
|
3.2. Construction of the Priority-Constrained TSP
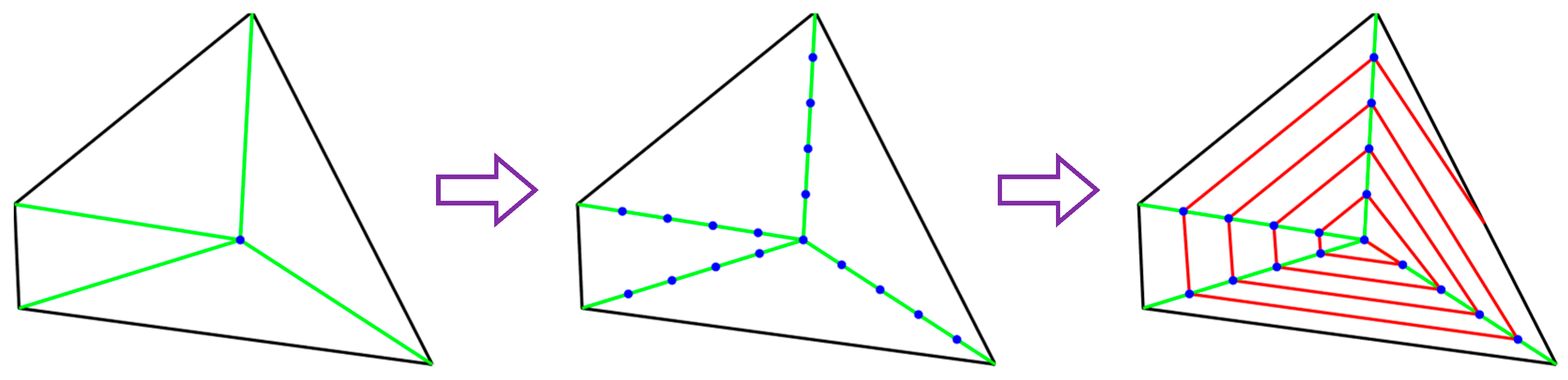
- Two methods of initial solution generation based on PKNN
- (1)
- If all K-neighboring regions of the current region have been visited, continue to select the subsequent set of K-neighboring regions for the Step 2 operation; if it is found that all such regions have been visited as well, repeat this process until an unvisited region emerges within any group of K-neighboring regions. This unvisited region is then cataloged within the collection in E, subsequently triggering the commencement of Step 3 operations;
- (2)
- In instances where the final set of neighboring regions adjacent to the current region consists of fewer elements than the stipulated value K, it is still treated as a valid set for Step 2 operations;
- (3)
- When all neighboring regions in the current region have been visited, the current region is designated as the last region in the sequence of visits. It is subsequently appended to the Order collection, thereby culminating in the aforementioned iterative loop.
| Algorithm 2: PKNN-Full (A, , K) |
| Input: All regional parameter set A, when A ← , the coordinate of depot , nearest neighbor parameter K Output: The initial solution of the inter-regional access sequence Order |
|
| Algorithm 3: PKNN-Excluded (A, , K) |
| Input: All regional parameter set A, when A ← , the coordinate of depot , nearest neighbor parameter K Output: The initial solution of the inter-regional access sequence Order |
|
- b.
- Local search strategy
- (1)
- Relocated (1)—N1: Reallocate to a position succeeding the j-th index in the access sequence Order contingent upon the fulfillment of any of the following conditions:① If ,② If ,
- (2)
- Relocated (2)—N2: Reallocate , to a position succeeding the j-th index in the access sequence Order contingent upon the fulfillment of any of the following conditions:① If ,② If ,
- (3)
- Swap (1-1)—N3: Swap and contingent upon the fulfillment of any of the following conditions:① If ,② If ,
- (4)
- Swap (2-1)—N4: Swap two adjacent regions , and another region in the access sequence Order contingent upon the fulfillment of any of the following conditions:① If ,② If ,
- (5)
- Swap (2-2)—N5: Swap the two adjacent regions , and the other two adjacent regions , in the access sequence Order contingent upon the fulfillment of the following conditions:If ,where and respectively represent the minimum and maximum values of priorities from region i to region j in the access sequence Order.
- c.
- Disturbance
| Algorithm 4: getOrder (A, K) |
| Input: All regional parameter set A, when A = , the coordinate of depot , nearest neighbor parameter K Output: The inter-regional access sequence Order |
|
3.3. Selection of Optimal Entry Points and Path Generation
| Algorithm 5: getWaypoint (, Order, path) |
| Input: Depot coordinates , access sequence Order, intra-regional waypoints path Output: Complete collection of waypoints PATH |
|
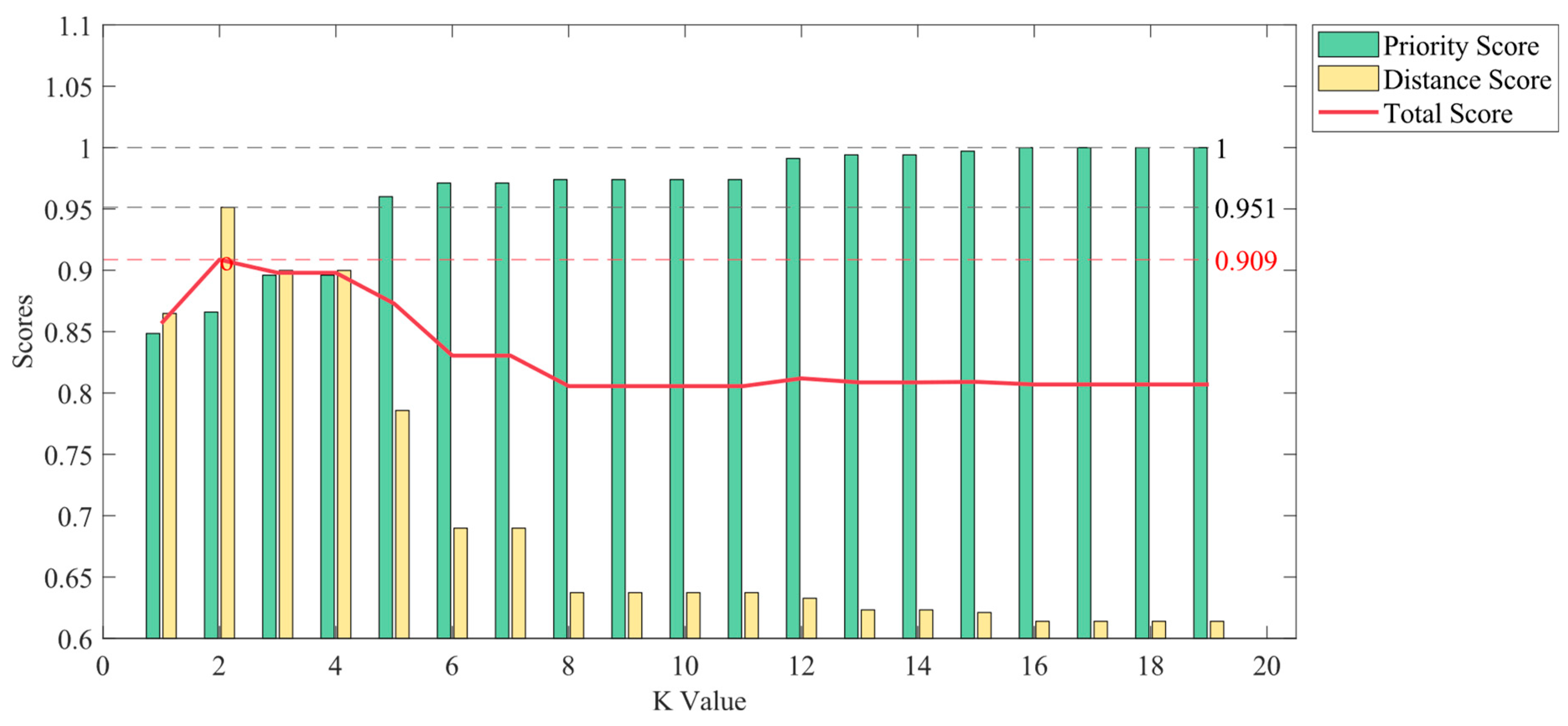
3.4. Path Evaluation Criteria Based on Priority and Distance
- Distance scoring strategy
- b.
- Priority scoring strategy
- c.
- Comprehensive scoring strategy
4. Simulation and Experiment
4.1. Obtainment of Three Different Initial Solutions
- The PKNN-Full Strategy
- b.
- The PKNN-Excluded Strategy
4.2. Optimizing Initial Solutions by RVND
4.3. Analysis and Comparison of Optimization Results
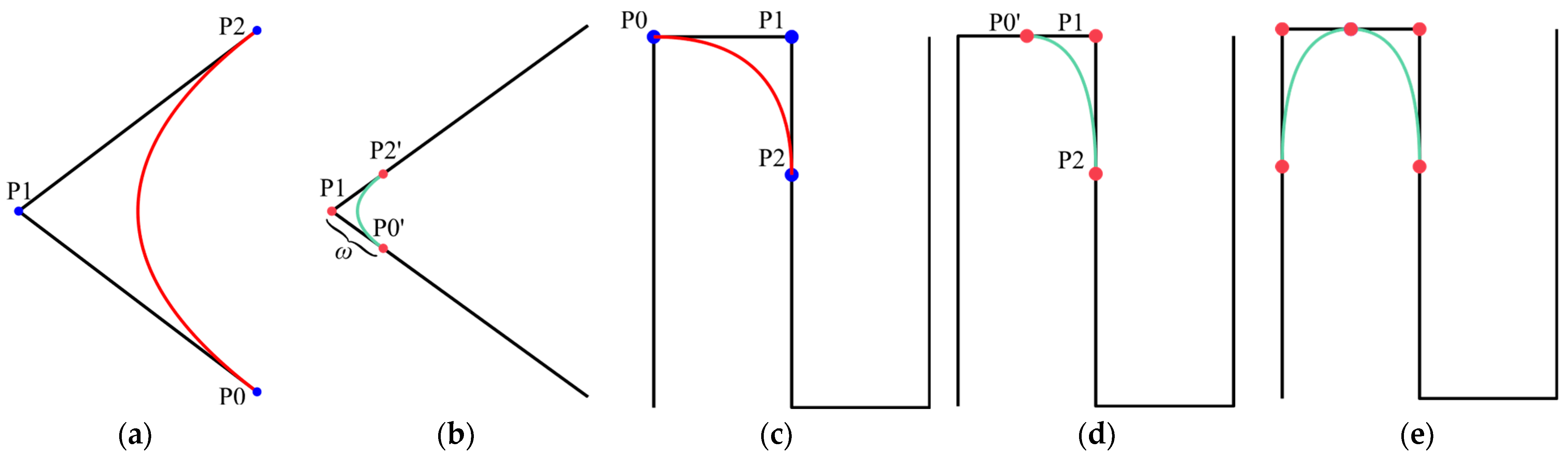
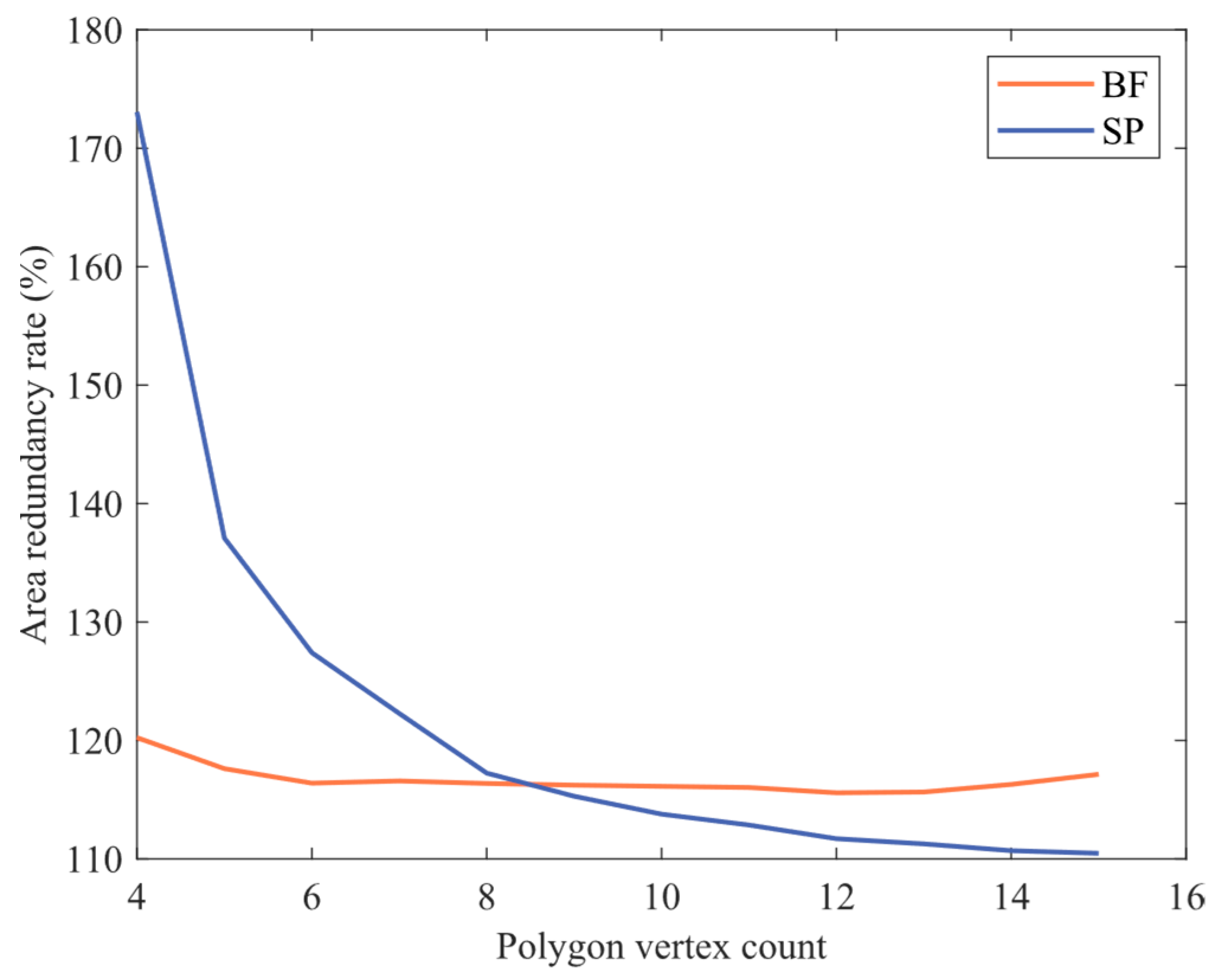
- Intra-regional path optimization analysis
- (1)
- Smooth Trajectory: Bezier curves contribute to smoothing the turning angles, reducing the drone’s jitter and oscillation during turns, thereby improving flight stability.
- (2)
- Energy Saving: Bezier curves effectively reduce motion energy consumption in aspects such as path length and motion control, resulting in energy savings for UAV operations.
- (3)
- Ease of Control: The control method is simple and easy to implement, leading to improved operational efficiency for the UAV.
- b.
- Comparison of two optimized coverage methods
- c.
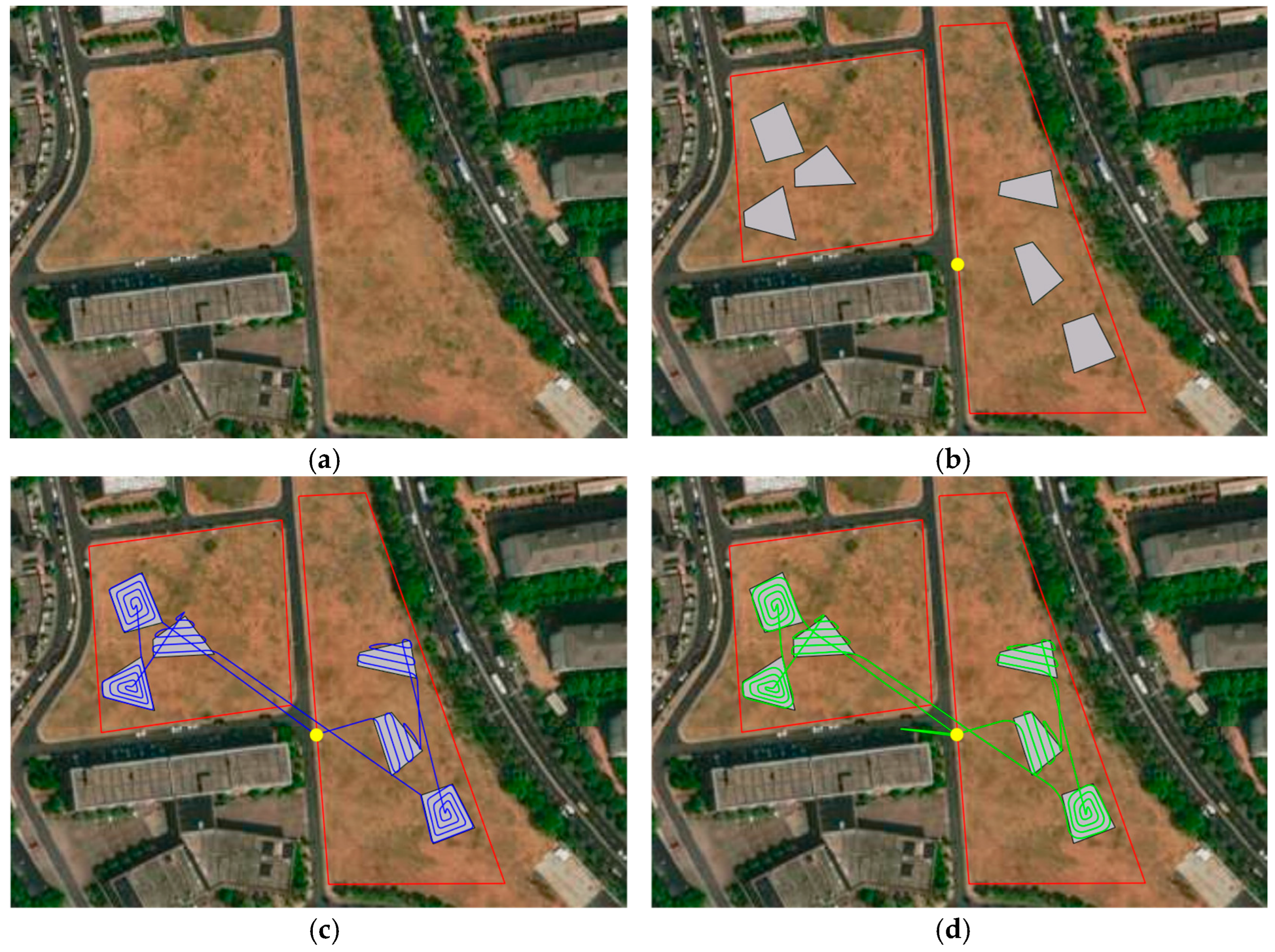
- Inter-regional path optimization analysis
4.4. UAV Path-Planning Simulation Platform Based on Unity3D
4.5. Flight-Path Experiment
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Jiong, D.; Ota, K.; Mianxiong, D. UAV-based Real-time Survivor Detection System in Post-disaster Search and Rescue Operations. IEEE J. Miniat. Air Space Syst. 2021, 2, 209–219. [Google Scholar] [CrossRef]
- Naidoo, Y.; Stopforth, R.; Bright, G. Development of an UAV for search & rescue applications. In Proceedings of the IEEE Africon ‘11, Victoria Falls, Zambia, 13–15 September 2011; pp. 1–6. [Google Scholar]
- Verykokou, S.; Doulamis, A.; Athanasiou, G.; Ioannidis, C.; Amditis, A.; Instrumentat, I.; Measurement, S. UAV-Based 3D Modelling of Disaster Scenes for Urban Search and Rescue. In Proceedings of the IEEE International Conference on Imaging Systems and Techniques (IST)/IEEE International School on Imaging, Chania, Greece, 4–6 October 2016; pp. 106–111. [Google Scholar]
- Cabreira, T.M.; Di Franco, C.; Ferreira, P.R.; Buttazzo, G.C. Energy-Aware Spiral Coverage Path Planning for UAV Photogrammetric Applications. IEEE Robot. Autom. Lett. 2018, 3, 3662–3668. [Google Scholar] [CrossRef]
- Jensen-Nau, K.R.; Hermans, T.; Leang, K.K. Near-Optimal Area-Coverage Path Planning of Energy-Constrained Aerial Robots With Application in Autonomous Environmental Monitoring. IEEE Trans. Autom. Sci. Eng. 2021, 18, 1453–1468. [Google Scholar] [CrossRef]
- Wang, H.P.; Zhang, S.Y.; Zhang, X.Y.; Zhang, X.B.; Liu, J.T. Near-Optimal 3-D Visual Coverage for Quadrotor Unmanned Aerial Vehicles Under Photogrammetric Constraints. IEEE Trans. Ind. Electron. 2022, 69, 1694–1704. [Google Scholar] [CrossRef]
- Luna, M.A.; Isaac, M.S.A.; Ragab, A.R.; Campoy, P.; Peña, P.F.; Molina, M. Fast Multi-UAV Path Planning for Optimal Area Coverage in Aerial Sensing Applications. Sensors 2022, 22, 2297. [Google Scholar] [CrossRef] [PubMed]
- Cabreira, T.M.; Brisolara, L.B.; Paulo, R.F. Survey on Coverage Path Planning with Unmanned Aerial Vehicles. Drones 2019, 3, 4. [Google Scholar] [CrossRef]
- Machmudah, A.; Shanmugavel, M.; Parman, S.; Abd Manan, T.S.; Dutykh, D.; Beddu, S.; Rajabi, A. Flight Trajectories Optimization of Fixed-Wing UAV by Bank-Turn Mechanism. Drones 2022, 6, 69. [Google Scholar] [CrossRef]
- Xie, J.F.; Carrillo, L.R.G.; Jin, L. An Integrated Traveling Salesman and Coverage Path Planning Problem for Unmanned Aircraft Systems. IEEE Control. Syst. Lett. 2019, 3, 67–72. [Google Scholar] [CrossRef]
- Irving Vasquez-Gomez, J.; Herrera-Lozada, J.-C.; Olguin-Carbajal, M. Coverage Path Planning for Surveying Disjoint Areas. In Proceedings of the International Conference on Unmanned Aircraft Systems (ICUAS), Dallas, TX, USA, 12–15 June 2018; pp. 899–904. [Google Scholar]
- Torres, M.; Pelta, D.A.; Verdegay, J.L.; Torres, J.C. Coverage path planning with unmanned aerial vehicles for 3D terrain reconstruction. Expert Syst. Appl. 2016, 55, 441–451. [Google Scholar] [CrossRef]
- Xie, J.F.; Carrillo, L.R.G.; Jin, L. Path Planning for UAV to Cover Multiple Separated Convex Polygonal Regions. IEEE Access 2020, 8, 51770–51785. [Google Scholar] [CrossRef]
- Chen, X.; Chen, J.; Du, C.; Xu, Y. Region Coverage Path Planning of Multiple Disconnected Convex Polygons Based on Simulated Annealing Algorithm. In Proceedings of the 2021 IEEE 4th International Conference on Computer and Communication Engineering Technology (CCET), Beijing, China, 13–15 August 2021; pp. 238–242. [Google Scholar]
- Ko, Y.C.; Gau, R.H. UAV Velocity Function Design and Trajectory Planning for Heterogeneous Visual Coverage of Terrestrial Regions. IEEE Trans. Mob. Comput. 2023, 22, 6205–6222. [Google Scholar] [CrossRef]
- Miao, Y.M.; Hwang, K.; Wu, D.; Hao, Y.X.; Chen, M. Drone Swarm Path Planning for Mobile Edge Computing in Industrial Internet of Things. IEEE Trans. Ind. Inform. 2023, 19, 6836–6848. [Google Scholar] [CrossRef]
- Khanam, Z.; Saha, S.; Ehsan, S.; Stolkin, R.; McDonald-Maier, K. Coverage Path Planning Techniques for Inspection of Disjoint Regions With Precedence Provision. IEEE Access 2021, 9, 5412–5427. [Google Scholar] [CrossRef]
- Panchamgam, K.; Xiong, Y.P.; Golden, B.; Dussault, B.; Wasil, E. The hierarchical traveling salesman problem. Optim. Lett. 2013, 7, 1517–1524. [Google Scholar] [CrossRef]
- Ahmed, Z.H. The Ordered Clustered Travelling Salesman Problem: A Hybrid Genetic Algorithm. Sci. World J. 2014, 2014, 258207. [Google Scholar] [CrossRef]
- Hà, M.H.; Phuong, H.N.; Nhat, H.T.N.; Langevin, A.; Trépanier, M. Solving the clustered traveling salesman problem with d-relaxed priority rule. Int. Trans. Oper. Res. 2022, 29, 837–853. [Google Scholar] [CrossRef]
- Salach, A.; Bakula, K.; Pilarska, M.; Ostrowski, W.; Górski, K.; Kurczynski, Z. Accuracy Assessment of Point Clouds from LiDAR and Dense Image Matching Acquired Using the UAV Platform for DTM Creation. ISPRS Int. J. Geo Inf. 2018, 7, 342. [Google Scholar] [CrossRef]
- Domingo, D.; Orka, H.O.; Næsset, E.; Kachamba, D.; Gobakken, T. Effects of UAV Image Resolution, Camera Type, and Image Overlap on Accuracy of Biomass Predictions in a Tropical Woodland. Remote Sens. 2019, 11, 948. [Google Scholar] [CrossRef]
- Yu-Song, J.; Xin-Min, W.; Hai, C.; Yan, L. Research on the Coverage Path Planning of UAVs for Polygon Areas. In Proceedings of the 2010 5th IEEE Conference on Industrial Electronics and Applications (ICIEA 2010), Taichung, Taiwan, 15–17 June 2010; pp. 1467–1472. [Google Scholar] [CrossRef]
- Berger, C.; Wzorek, M.; Kvarnström, J.; Conte, G.; Doherty, P.; Eriksson, A. Area Coverage with Heterogeneous UAVs using Scan Patterns. In Proceedings of the 14th IEEE International Symposium on Safety, Security, and Rescue Robotics (SSRR), Lausanne, Switzerland, 23–27 October 2016; pp. 342–349. [Google Scholar]
- Silva, M.M.; Subramanian, A.; Vidal, T.; Ochi, L.S. A simple and effective metaheuristic for the Minimum Latency Problem. Eur. J. Oper. Res. 2012, 221, 513–520. [Google Scholar] [CrossRef]
- Mladenovic, N.; Hansen, P. Variable neighborhood search. Comput. Oper. Res. 1997, 24, 1097–1100. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbol | Definition | Symbol | Definition |
|---|---|---|---|
| The region’s parameter set | The coefficient of relaxation | ||
| The set of accessed regions | The distances from the strip’s sides to the base edge | ||
| The central point coordinates of the region | Decision variable, whether the waypoint, p, is the entrance of the region | ||
| The distance matrix | The number of priorities | ||
| The set of unvisited regions | The number of waypoints in the region | ||
| The priority set | The number of vertices in the region | ||
| The sides of the strip proximal to the bottom | The path overlap rate of the UAV | ||
| The sides of the strip further to the bottom | The priority of the region | ||
| The region’s number set | Decision variable, whether the waypoint, p, is the export of the region | ||
| The region’s number set including the depot | The position of the region in the access sequence | ||
| The number of stripes in the region | The vertex coordinates of the region | ||
| P | The priority matrix | The coordinate of the waypoints | |
| The set of regions with the same priority | Decision variable, whether there is a connecting path between two regions, i, j | ||
| The width of the convex region | Decision variable, whether there is a connecting path between two waypoints, p, q, in the region | ||
| The vertex set of the region | The sensor’s sampling diameter | ||
| The waypoints set of the region | The distance between the UAV’s scan lines |
| Path | PKNN-Full | PKNN-Exclude | PKNN-Full RVND | PKNN-Exclude RVND |
|---|---|---|---|---|
| Original | 29,178.3249 | 29,486.1863 | 28,617.9472 | 28,726.4042 |
| Bezier | 27,553.6353 | 27,862.4824 | 27,003.0889 | 27,121.3444 |
| Opt. (%) | 5.5681 | 5.5067 | 5.6428 | 5.5874 |
| Params | PKNN-Full | PKNN-Excluded | Gap | |||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| No | n | g | d | Min Dist. | Max SCP | Max SCD | Max SC | Time (s) | Opt. (%) | Min Dist. | Max SCP | Max SCD | Max SC | Time (s) | Opt. (%) | F-E (%) |
| 1 | 10 | 2 | - | 7271.9 | 1.000 | 0.995 | 0.937 | 0.003 | 1.17 | 7271.9 | 1.000 | 0.995 | 0.937 | 0.008 | 1.17 | 0 |
| 0 | 7271.9 | 1.000 | 0.995 | 0.937 | 0.028 | 7271.9 | 1.000 | 0.995 | 0.937 | 0.029 | ||||||
| 1 | 7232.9 | 0.929 | 1.000 | 0.948 | 0.028 | 7232.9 | 0.929 | 1.000 | 0.948 | 0.029 | ||||||
| 2 | 10 | 2 | - | 7244.8 | 1.000 | 0.899 | 0.928 | 0.003 | 3.23 | 7244.8 | 1.000 | 0.899 | 0.863 | 0.003 | 5.79 | +4.93 |
| 0 | 6553.4 | 1.000 | 0.994 | 0.944 | 0.025 | 6553.4 | 1.000 | 0.994 | 0.910 | 0.028 | ||||||
| 1 | 6515.4 | 0.938 | 1.000 | 0.958 | 0.029 | 6515.4 | 0.826 | 1.000 | 0.913 | 0.029 | ||||||
| 3 | 10 | 2 | - | 7468.4 | 1.000 | 0.927 | 0.918 | 0.003 | 0.87 | 7468.4 | 1.000 | 0.927 | 0.918 | 0.003 | 0.87 | 0 |
| 0 | 7468.4 | 1.000 | 0.927 | 0.918 | 0.028 | 7468.4 | 1.000 | 0.927 | 0.918 | 0.025 | ||||||
| 1 | 6920.1 | 0.897 | 1.000 | 0.927 | 0.032 | 6920.1 | 0.897 | 1.000 | 0.927 | 0.027 | ||||||
| 4 | 10 | 3 | - | 8323.2 | 1.000 | 0.858 | 0.895 | 0.003 | 6.25 | 8646.7 | 1.000 | 0.826 | 0.895 | 0.003 | 2.23 | +3.93 |
| 0 | 7904.6 | 0.986 | 0.904 | 0.914 | 0.025 | 8400.7 | 0.973 | 0.850 | 0.899 | 0.261 | ||||||
| 1 | 7144.2 | 0.973 | 1.000 | 0.951 | 0.029 | 7144.2 | 0.890 | 1.000 | 0.915 | 0.026 | ||||||
| 2 | 7144.2 | 0.830 | 1.000 | 0.915 | 0.029 | 7144.2 | 0.901 | 1.000 | 0.915 | 0.032 | ||||||
| 5 | 10 | 3 | - | 6948.2 | 1.000 | 0.879 | 0.876 | 0.003 | 8.90 | 6948.2 | 1.000 | 0.879 | 0.878 | 0.003 | 8.66 | 0 |
| 0 | 6735.9 | 0.989 | 0.907 | 0.903 | 0.036 | 6859.0 | 0.989 | 0.891 | 0.890 | 0.028 | ||||||
| 1 | 6108.1 | 0.908 | 1.000 | 0.954 | 0.030 | 6108.1 | 0.908 | 1.000 | 0.954 | 0.050 | ||||||
| 2 | 6108.1 | 0.908 | 1.000 | 0.954 | 0.033 | 6108.1 | 0.908 | 1.000 | 0.954 | 0.031 | ||||||
| 6 | 10 | 3 | - | 7332.5 | 1.000 | 0.945 | 0.859 | 0.003 | 7.92 | 7332.5 | 1.000 | 0.945 | 0.869 | 0.003 | 6.67 | 0 |
| 0 | 7332.5 | 0.967 | 0.945 | 0.873 | 0.024 | 7332.5 | 0.989 | 0.945 | 0.869 | 0.027 | ||||||
| 1 | 7332.5 | 0.937 | 0.945 | 0.927 | 0.026 | 7332.5 | 0.927 | 0.945 | 0.927 | 0.029 | ||||||
| 2 | 7136.5 | 0.927 | 0.971 | 0.927 | 0.031 | 7136.5 | 0.918 | 0.971 | 0.903 | 0.029 | ||||||
| 7 | 20 | 3 | - | 8335.3 | 1.000 | 0.951 | 0.909 | 0.033 | 1.10 | 11,165 | 1.000 | 0.784 | 0.836 | 0.013 | 1.79 | +7.99 |
| 0 | 7930.2 | 1.000 | 0.951 | 0.909 | 0.293 | 10,827 | 1.000 | 0.808 | 0.851 | 0.280 | ||||||
| 1 | 7946.9 | 0.966 | 0.998 | 0.911 | 0.338 | 10,082 | 0.868 | 0.863 | 0.834 | 0.300 | ||||||
| 2 | 7930.2 | 0.848 | 1.000 | 0.919 | 0.303 | 9518.7 | 0.819 | 0.919 | 0.842 | 0.303 | ||||||
| 8 | 20 | 3 | - | 10417.0 | 1.000 | 0.840 | 0.843 | 0.009 | 5.46 | 8812.0 | 1.000 | 0.9 | 0.898 | 0.011 | 2.34 | −3.37 |
| 0 | 9942.3 | 1.000 | 0.880 | 0.875 | 0.275 | 8582.7 | 1.000 | 0.924 | 0.906 | 0.287 | ||||||
| 1 | 9856.1 | 0.886 | 0.888 | 0.875 | 0.325 | 7946.9 | 0.894 | 0.998 | 0.911 | 0.292 | ||||||
| 2 | 8749.9 | 0.823 | 1.000 | 0.889 | 0.293 | 8008.8 | 0.848 | 0.990 | 0.919 | 0.314 | ||||||
| 9 | 20 | 3 | - | 8870.3 | 1.000 | 0.943 | 0.887 | 0.008 | 2.71 | 9043.1 | 1.000 | 0.925 | 0.853 | 0.011 | 6.21 | +0.56 |
| 0 | 8657.8 | 0.997 | 0.967 | 0.897 | 0.284 | 8772.1 | 0.997 | 0.954 | 0.872 | 0.281 | ||||||
| 1 | 8369.3 | 0.926 | 1.000 | 0.911 | 0.286 | 8369.3 | 0.924 | 1.000 | 0.894 | 0.293 | ||||||
| 2 | 8456.6 | 0.895 | 0.990 | 0.911 | 0.315 | 8555.6 | 0.895 | 0.978 | 0.906 | 0.306 | ||||||
| 10 | 20 | 5 | - | 9301.3 | 1.000 | 0.871 | 0.852 | 0.008 | 6.57 | 9301.3 | 1.000 | 0.871 | 0.852 | 0.011 | 6.57 | 0 |
| 0 | 9048.7 | 0.995 | 0.895 | 0.864 | 0.275 | 9048.7 | 1.000 | 0.895 | 0.864 | 0.277 | ||||||
| 1 | 8643.9 | 0.941 | 0.937 | 0.890 | 0.291 | 8643.9 | 0.964 | 0.937 | 0.887 | 0.281 | ||||||
| 2 | 8175.1 | 0.943 | 0.991 | 0.908 | 0.294 | 8175.1 | 0.912 | 0.991 | 0.908 | 0.292 | ||||||
| 3 | 8118.3 | 0.890 | 1.000 | 0.908 | 0.305 | 8175.1 | 0.916 | 0.991 | 0.908 | 0.298 | ||||||
| 4 | 8175.1 | 0.849 | 0.991 | 0.908 | 0.288 | 8175.1 | 0.857 | 0.991 | 0.908 | 0.302 | ||||||
| 11 | 20 | 5 | - | 9144.6 | 1.000 | 0.821 | 0.786 | 0.007 | 7.00 | 9144.6 | 1.000 | 0.821 | 0.775 | 0.013 | 9.68 | −1.07 |
| 0 | 8940.2 | 0.993 | 0.840 | 0.802 | 0.315 | 8940.2 | 0.993 | 0.840 | 0.802 | 0.287 | ||||||
| 1 | 8473.3 | 0.947 | 0.886 | 0.824 | 0.300 | 8473.3 | 0.933 | 0.886 | 0.850 | 0.295 | ||||||
| 2 | 8320.6 | 0.912 | 0.903 | 0.841 | 0.307 | 8320.6 | 0.896 | 0.903 | 0.841 | 0.293 | ||||||
| 3 | 8285.5 | 0.866 | 0.906 | 0.828 | 0.322 | 8285.5 | 0.830 | 0.906 | 0.828 | 0.299 | ||||||
| 4 | 8113.4 | 0.874 | 0.926 | 0.830 | 0.318 | 8113.4 | 0.874 | 0.926 | 0.826 | 0.318 | ||||||
| 12 | 20 | 5 | - | 10,569.0 | 1.000 | 0.855 | 0.848 | 0.007 | 2.00 | 11,034 | 1.000 | 0.817 | 0.791 | 0.012 | 8.97 | +0.35 |
| 0 | 10,132.0 | 0.992 | 0.890 | 0.865 | 0.264 | 10,403 | 1.000 | 0.866 | 0.821 | 0.275 | ||||||
| 1 | 9938.9 | 0.955 | 0.907 | 0.864 | 0.286 | 10,266 | 0.955 | 0.878 | 0.851 | 0.290 | ||||||
| 2 | 10,100.0 | 0.911 | 0.892 | 0.863 | 0.289 | 10,266 | 0.911 | 0.878 | 0.862 | 0.290 | ||||||
| 3 | 9790.2 | 0.842 | 0.921 | 0.863 | 0.304 | 10,278 | 0.867 | 0.877 | 0.858 | 0.298 | ||||||
| 4 | 9790.2 | 0.801 | 0.921 | 0.846 | 0.293 | 9941.1 | 0.850 | 0.907 | 0.837 | 0.304 | ||||||
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Du, L.; Fan, Y.; Gui, M.; Zhao, D. A Multi-Regional Path-Planning Method for Rescue UAVs with Priority Constraints. Drones 2023, 7, 692. https://doi.org/10.3390/drones7120692
Du L, Fan Y, Gui M, Zhao D. A Multi-Regional Path-Planning Method for Rescue UAVs with Priority Constraints. Drones. 2023; 7(12):692. https://doi.org/10.3390/drones7120692
Chicago/Turabian StyleDu, Lexu, Yankai Fan, Mingzhen Gui, and Dangjun Zhao. 2023. "A Multi-Regional Path-Planning Method for Rescue UAVs with Priority Constraints" Drones 7, no. 12: 692. https://doi.org/10.3390/drones7120692
APA StyleDu, L., Fan, Y., Gui, M., & Zhao, D. (2023). A Multi-Regional Path-Planning Method for Rescue UAVs with Priority Constraints. Drones, 7(12), 692. https://doi.org/10.3390/drones7120692