
Trajectory Planning and Control Design for Aerial Autonomous Recovery of a Quadrotor



Abstract
:1. Introduction
1.1. Related Work
1.2. Contribution
1.3. Problem Definition
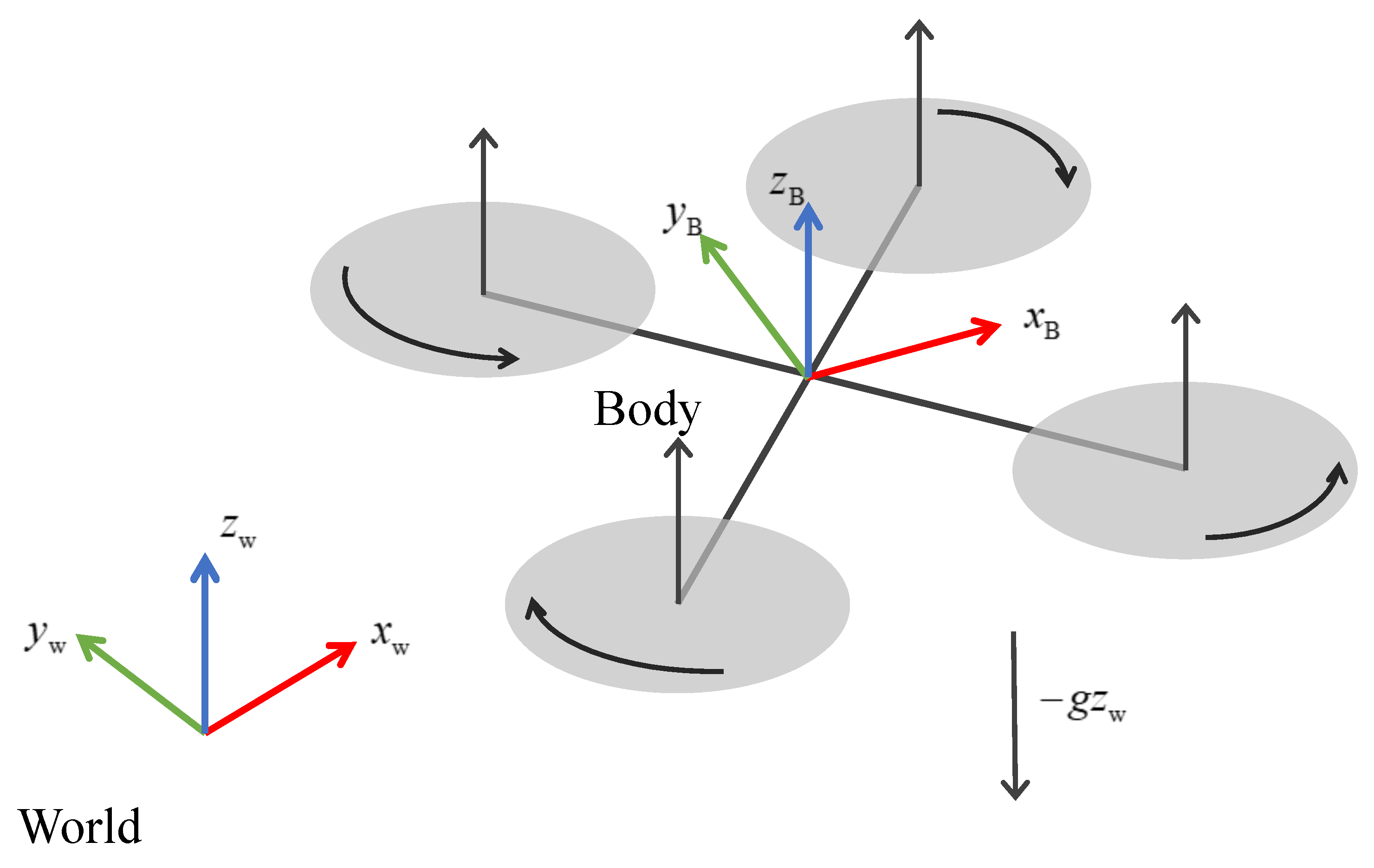
2. Coordinate System Definitions
- 1.
- Body frame: take the center of mass of the UAV as the origin and the plane of symmetry as the plane; the axis points to the front of the nose, the axis is perpendicular to the plane and points to the left side the UAV, and the axis points upward, satisfying the right-hand law.
- 2.
- World frame: because is located on the ground at the take-off point of the UAV, the axis points upwards perpendicular to the ground, the axis points due east, and the axis points due north; this coordinate system is commonly known as the East North Up (ENU) coordinate system.
3. Autonomous Landing System
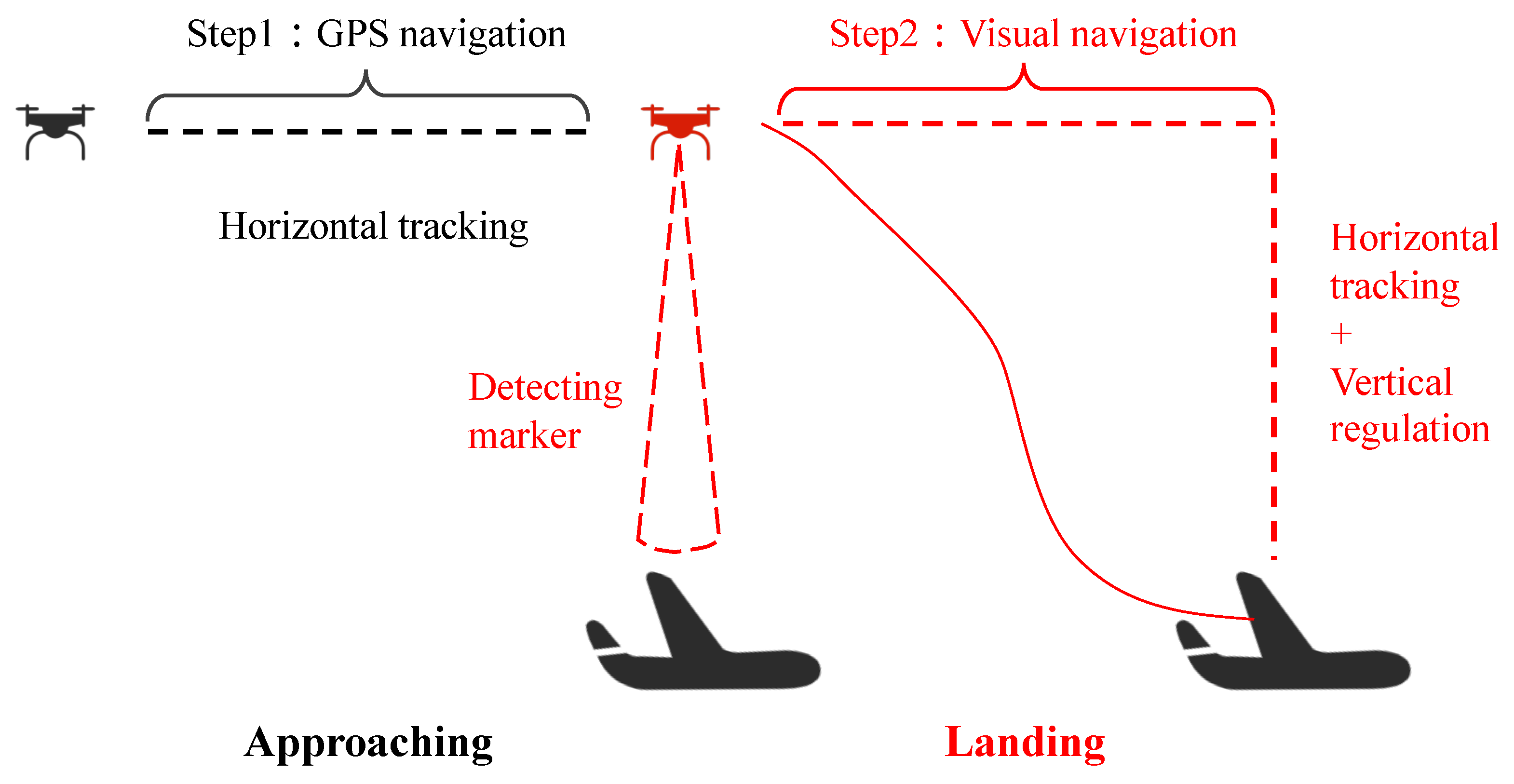
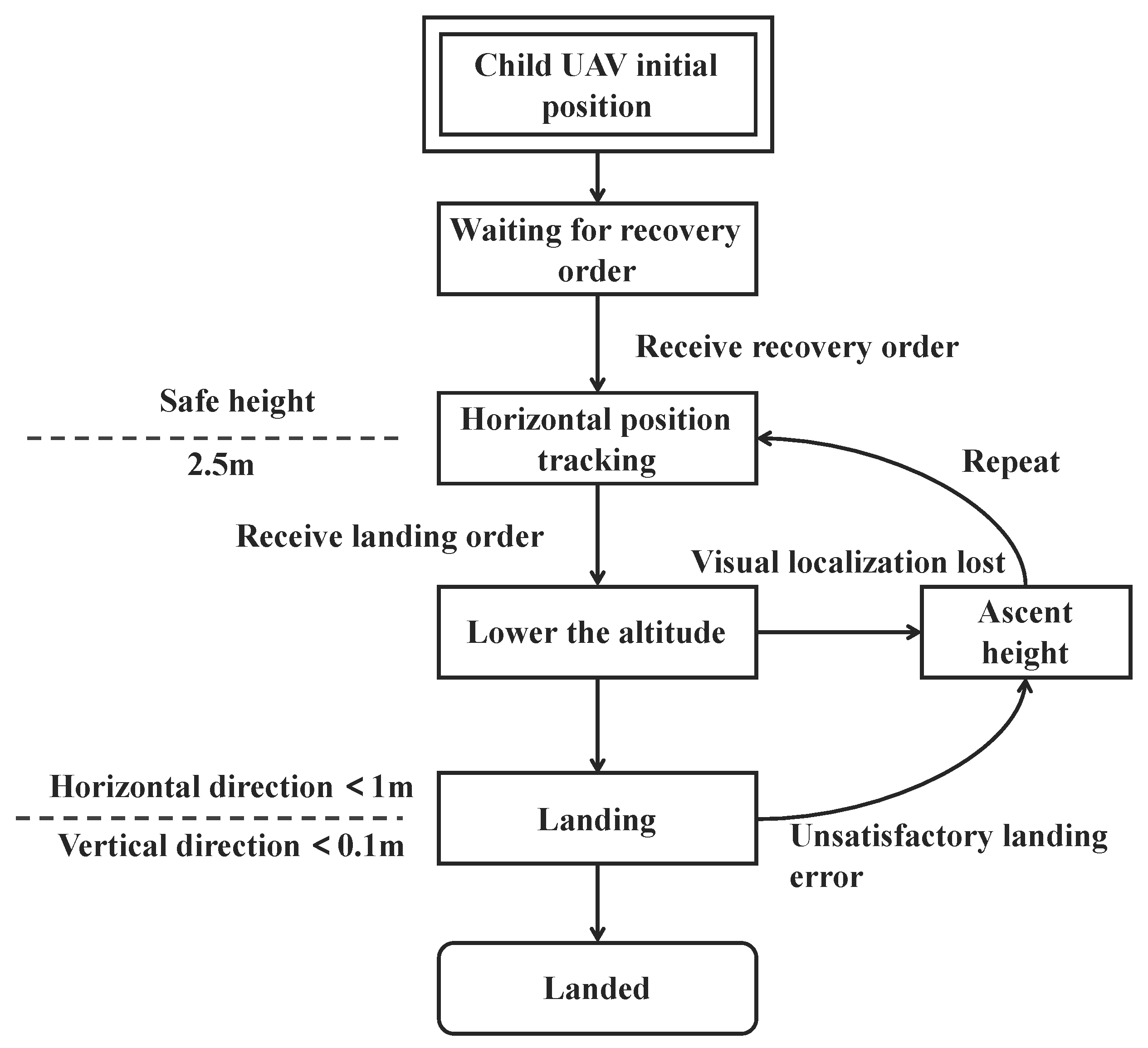
3.1. Landing State Machine
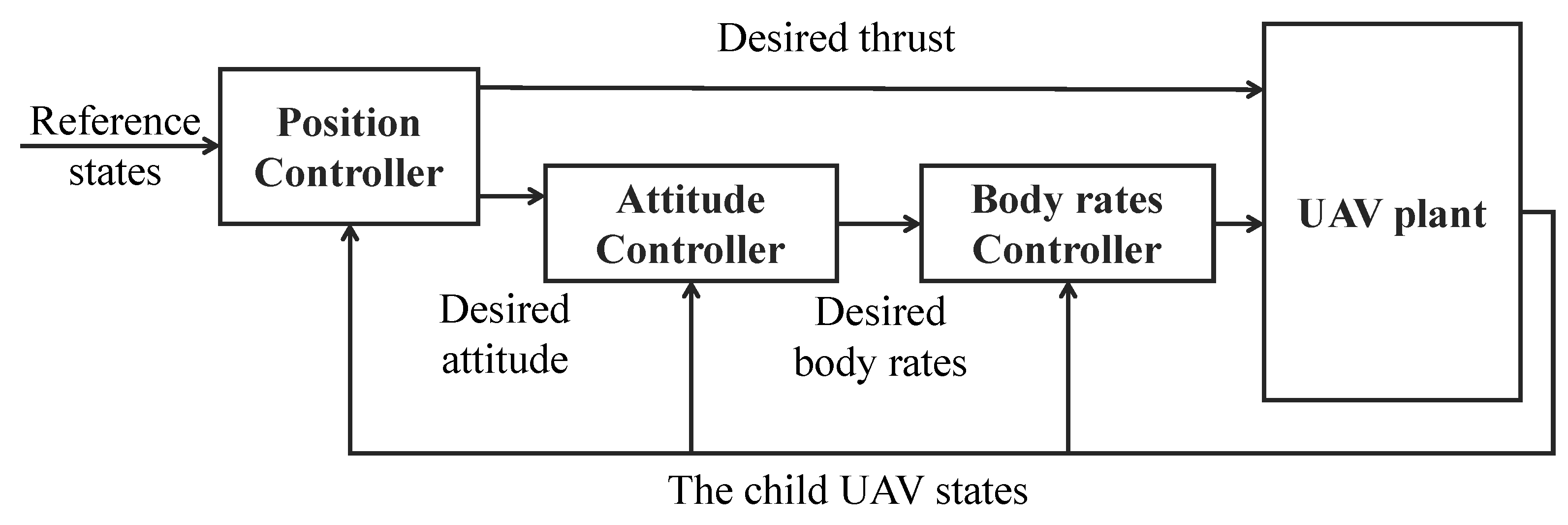
3.2. Angular Velocity Controller
3.3. Nonlinear Trajectory Tracking Controller
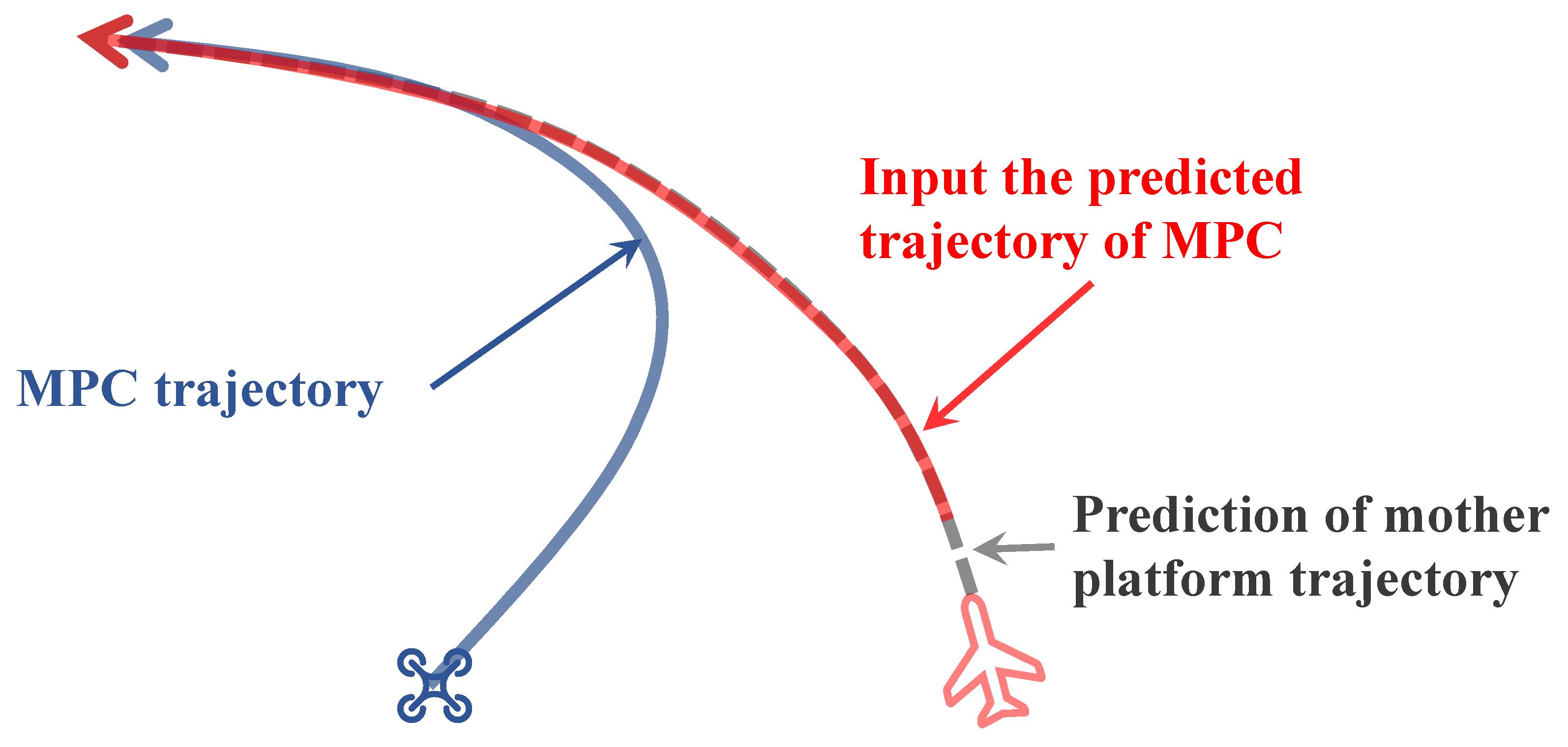
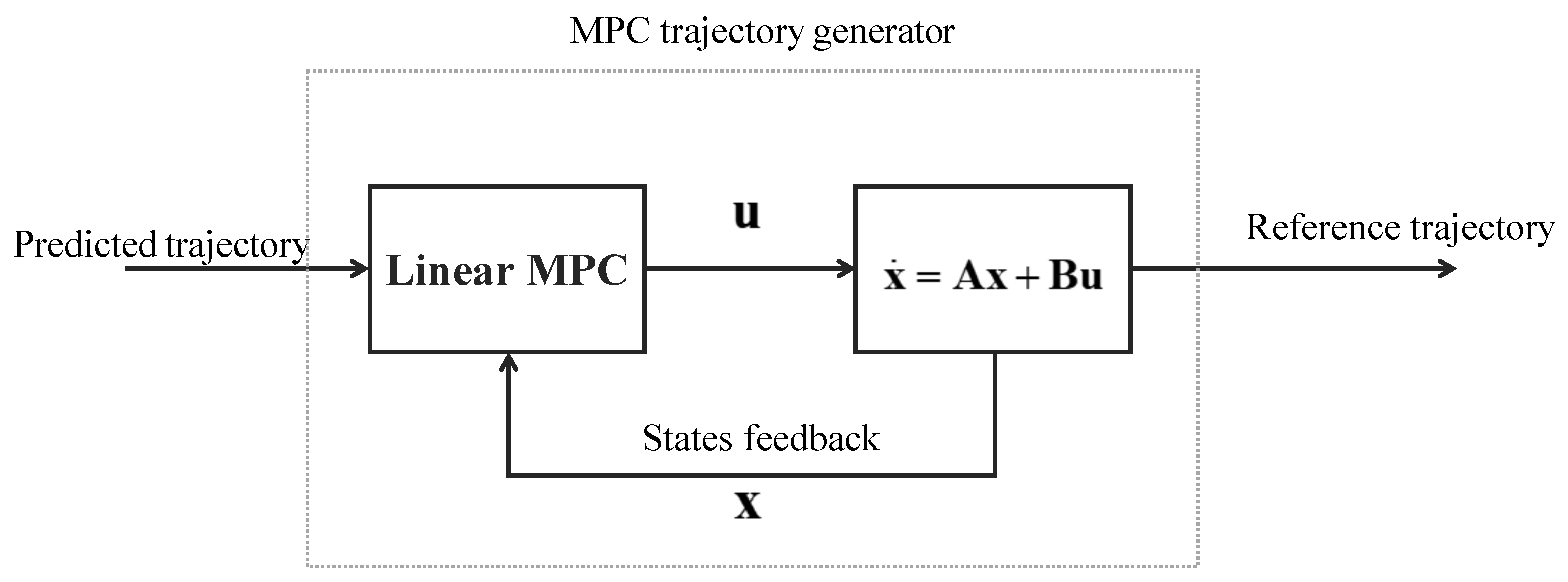
3.4. Linear MPC Trajectory Generator
3.5. Vision-Based State Estimation of the Landing Platform
4. Simulation Experiments
4.1. Implementation Details
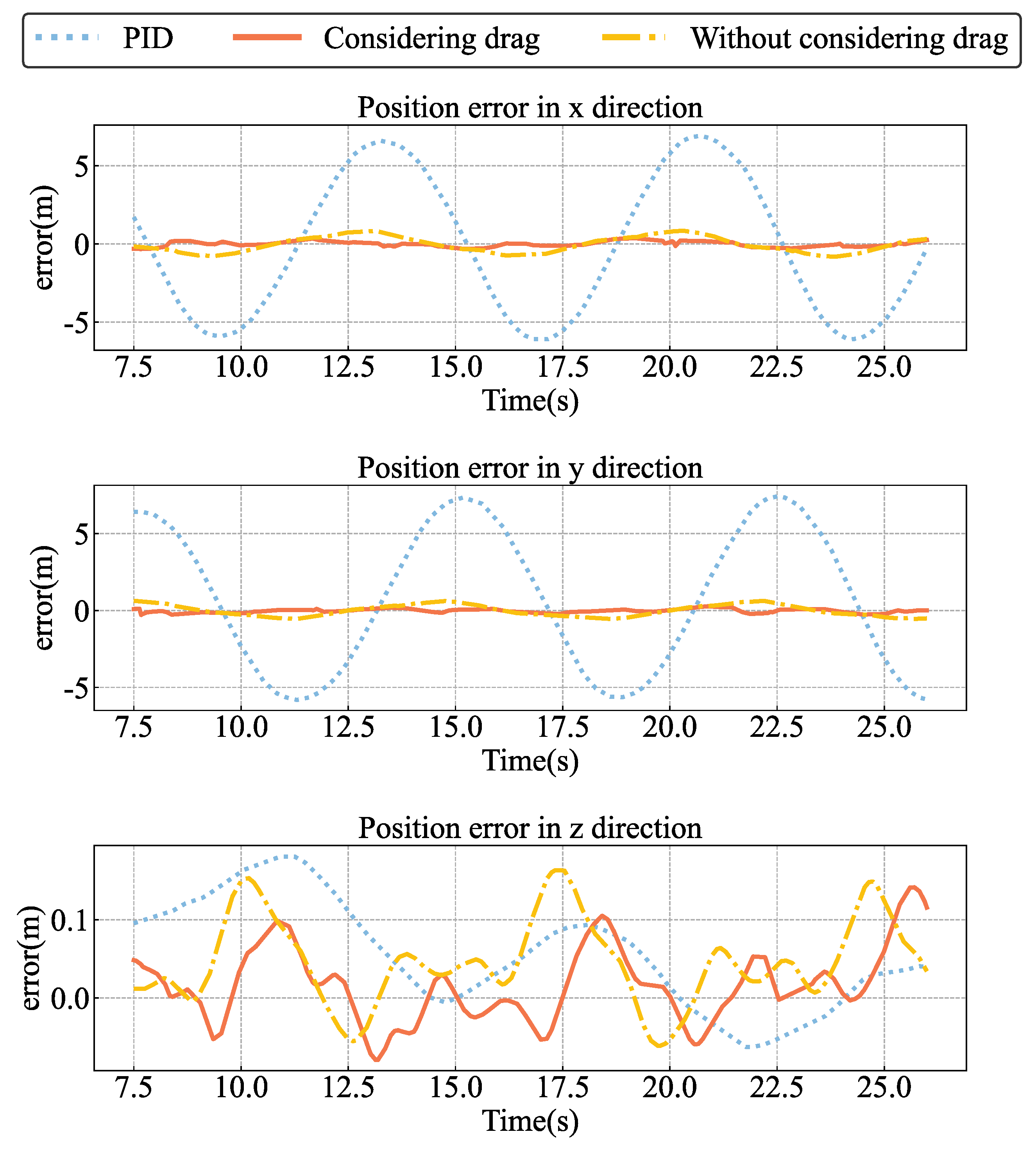
4.2. Trajectory Tracking Controller Evaluation
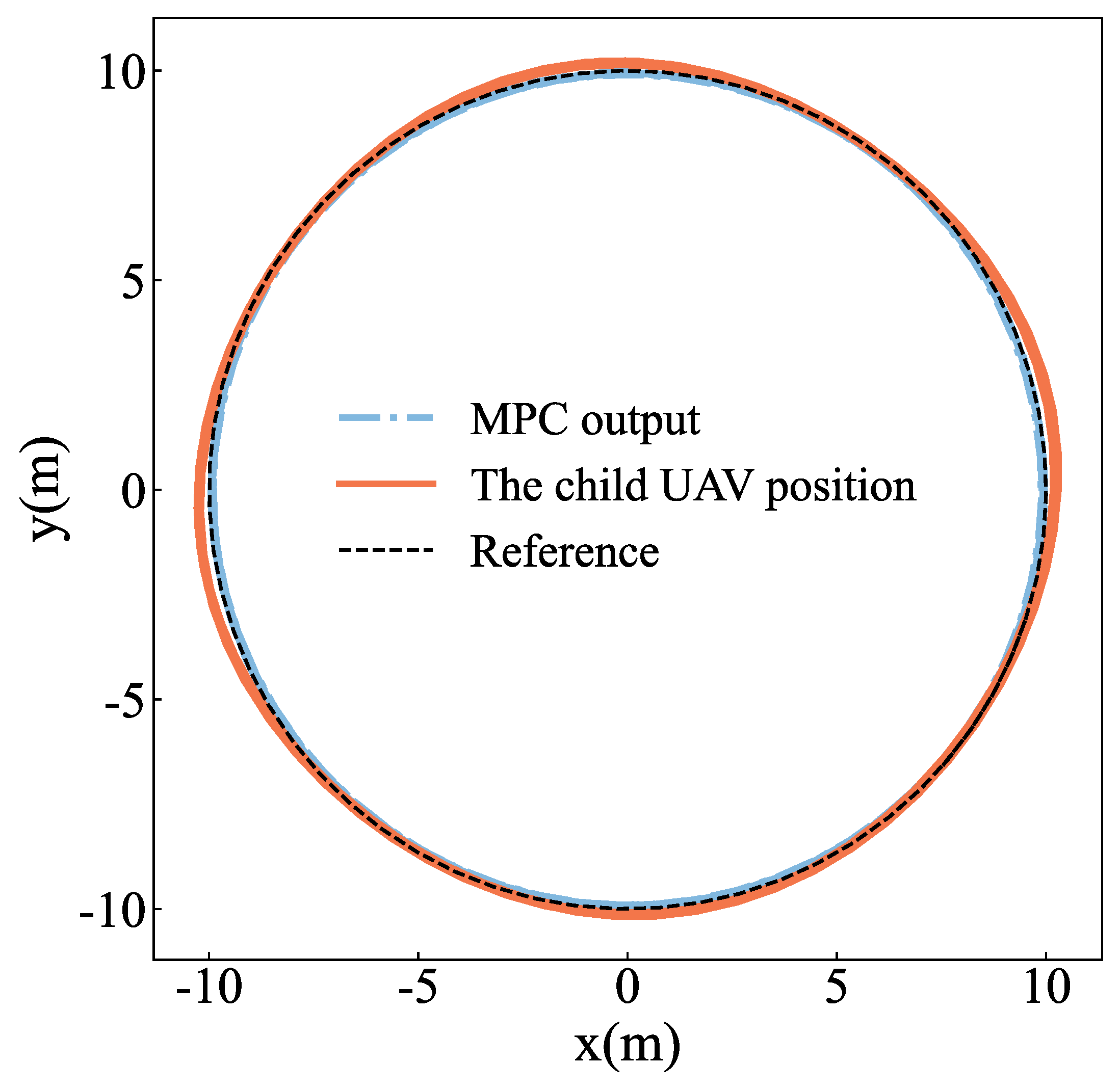
4.3. MPC Trajectory Generator Evaluation
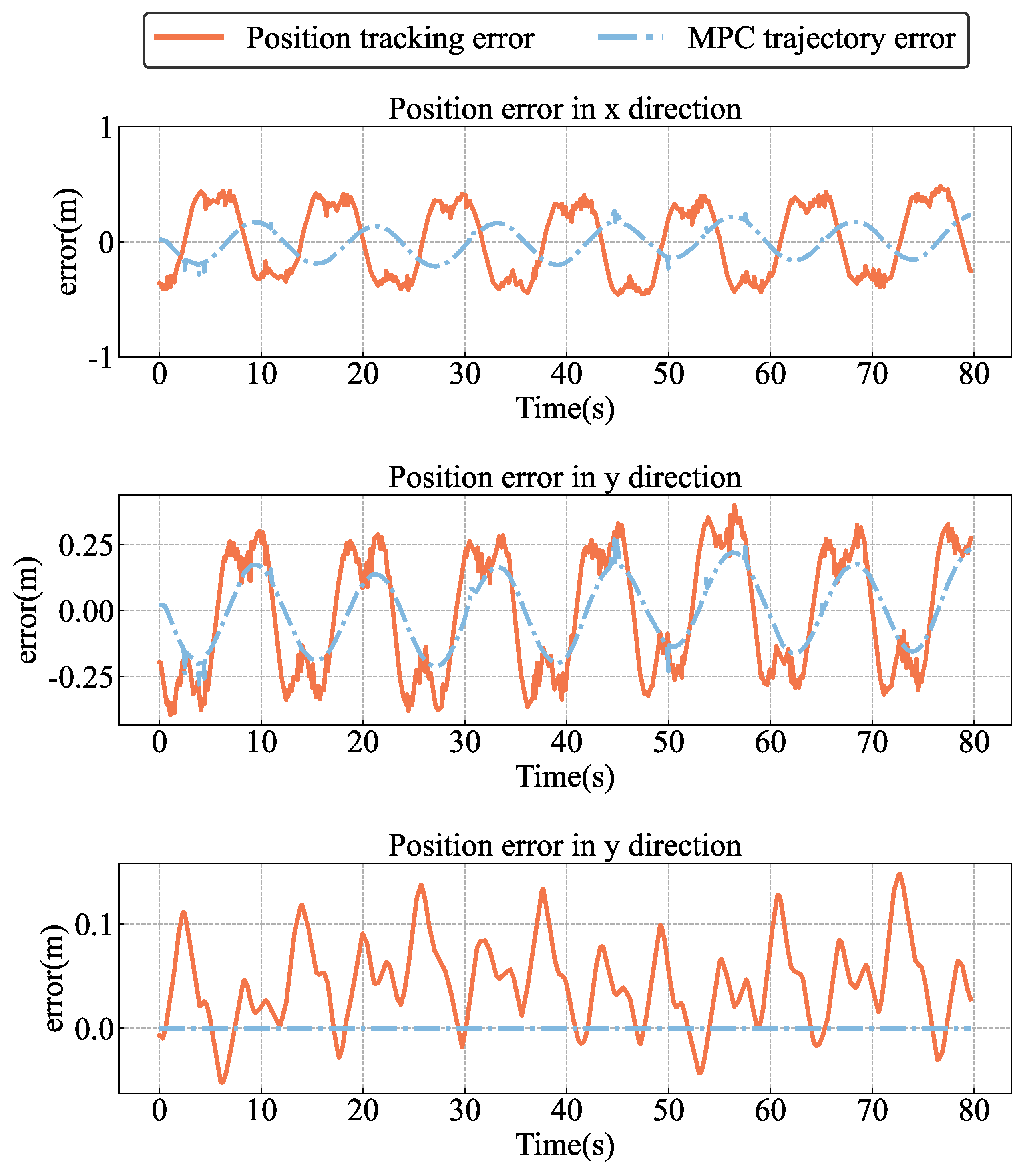
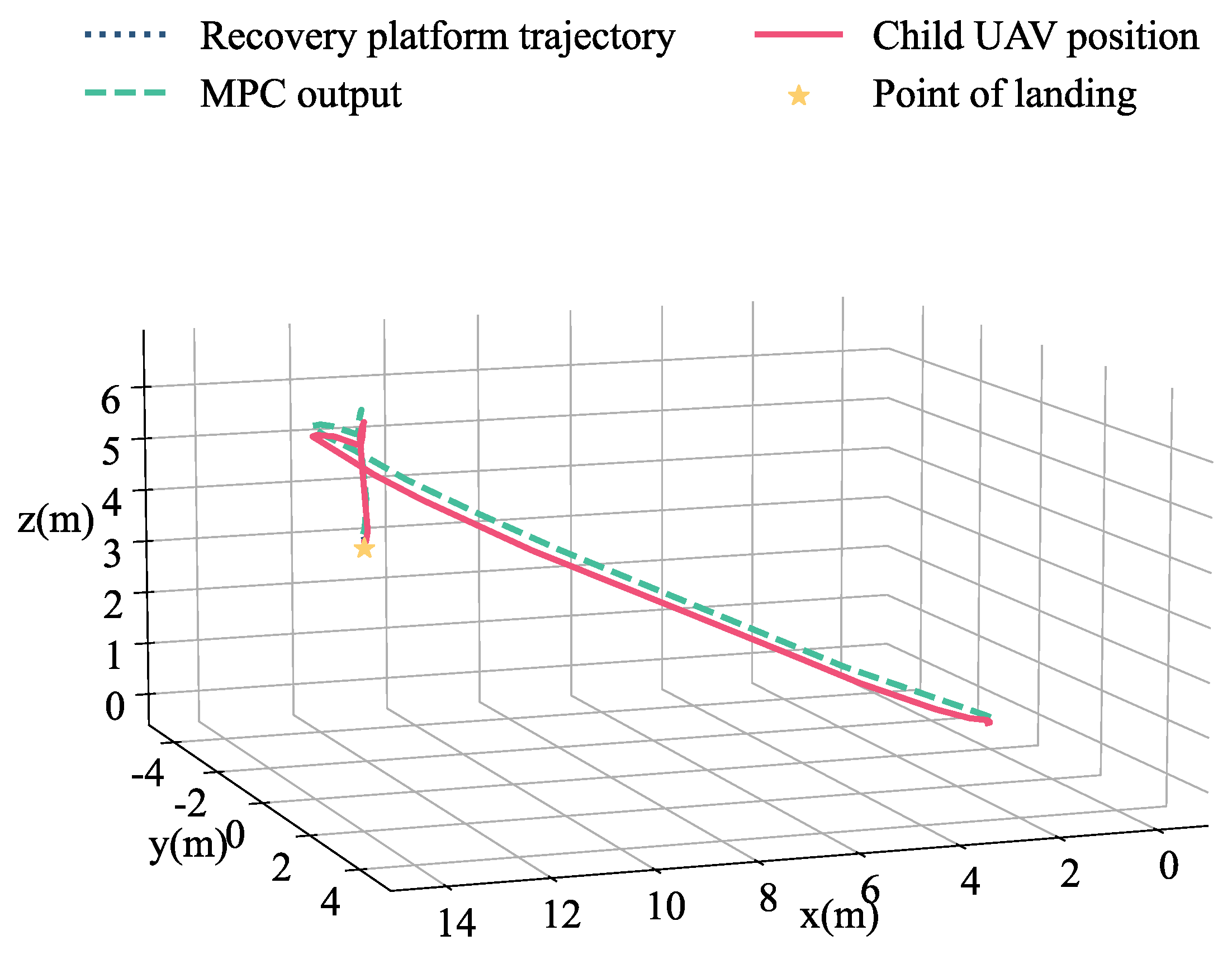
4.4. Autonomous Recovery Simulation
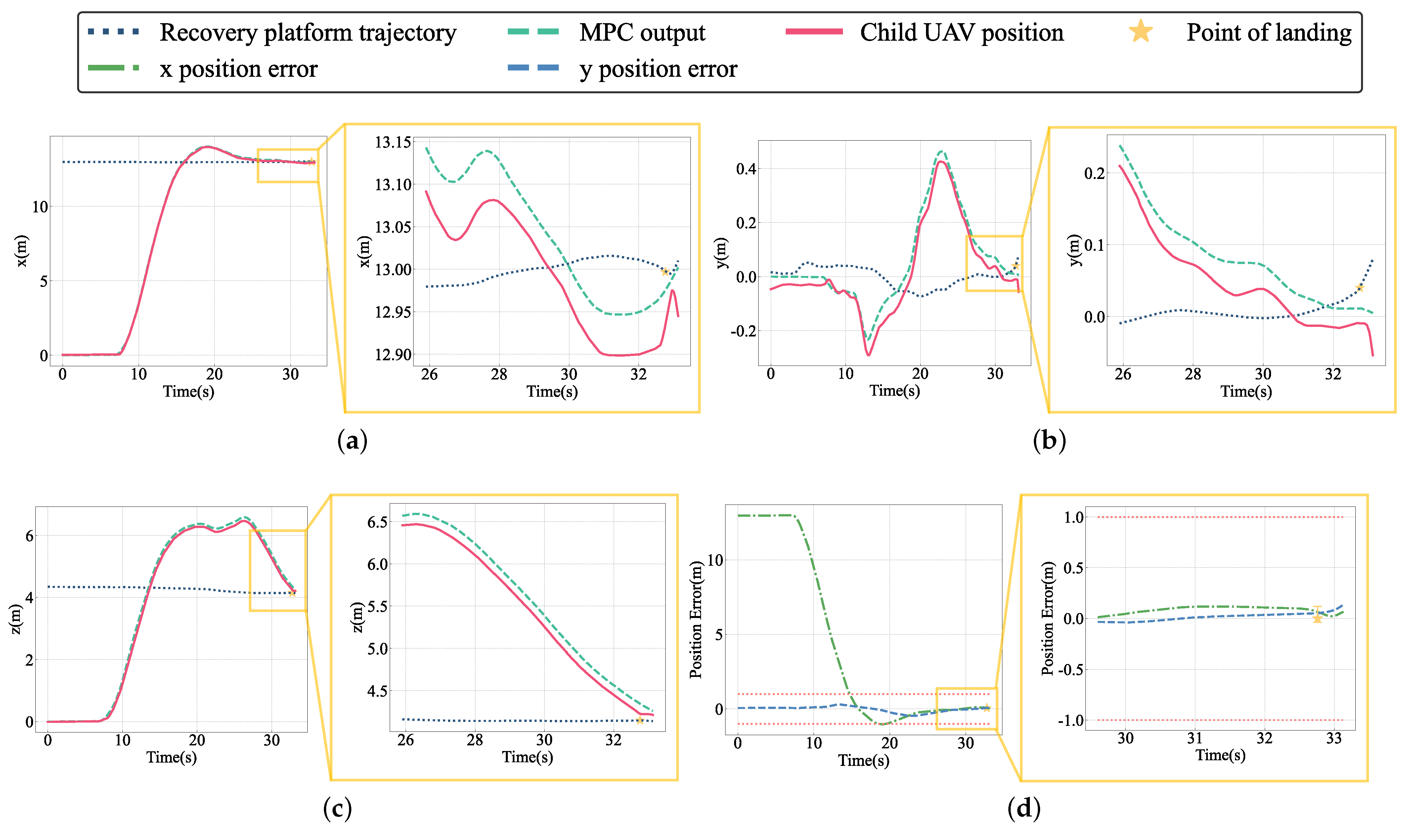
4.4.1. Recovery Mission in Hovering State
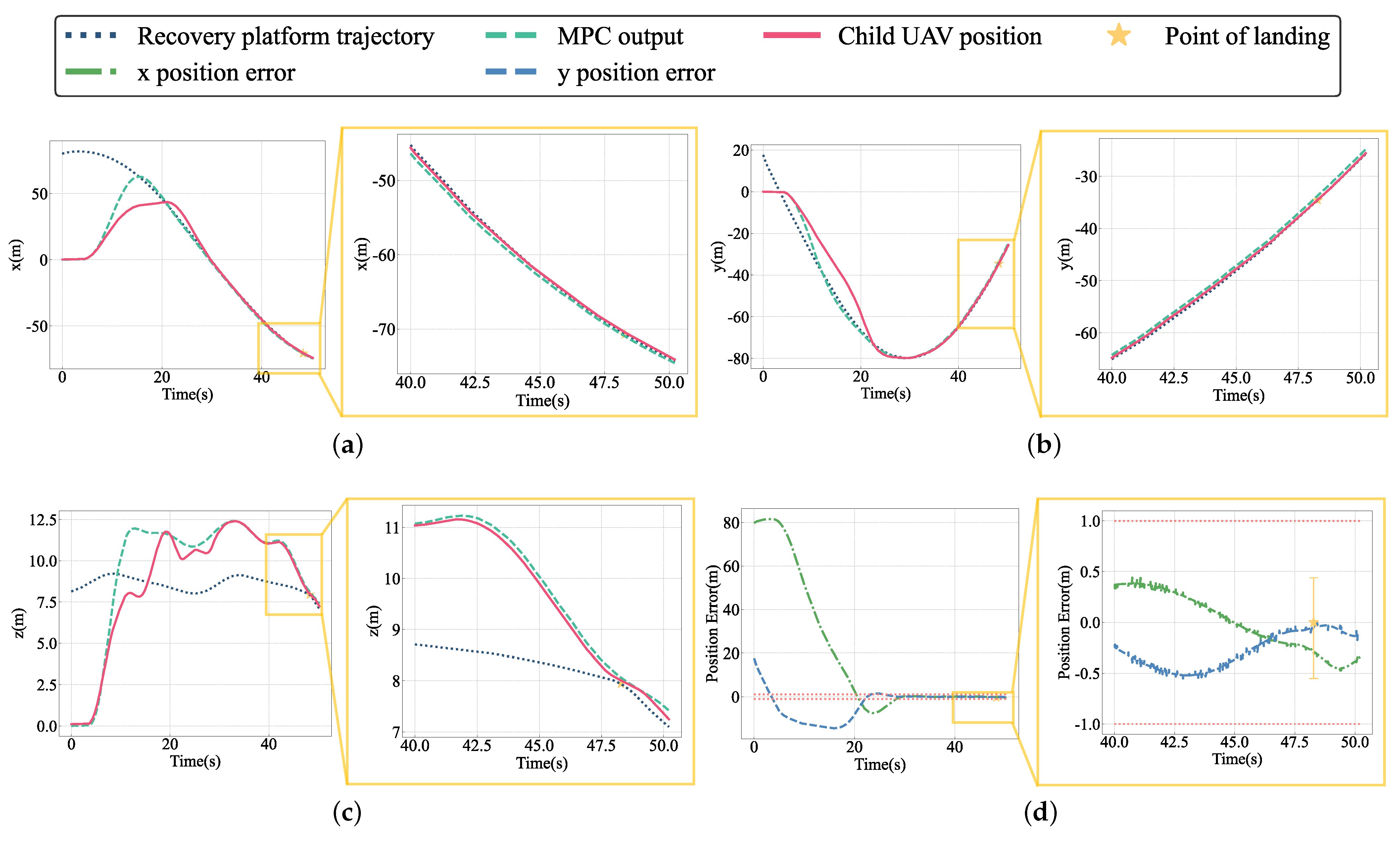
4.4.2. Recovery Mission in Circling State
5. Discussion
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Petrlik, M.; Baca, T.; Hert, D.; Vrba, M.; Krajnik, T.; Saska, M. A Robust UAV System for Operations in a Constrained Environment. IEEE Robot. Autom. Lett. 2020, 5, 2169–2176. [Google Scholar] [CrossRef]
- Zhang, H.T.; Hu, B.B.; Xu, Z.; Cai, Z.; Liu, B.; Wang, X.; Geng, T.; Zhong, S.; Zhao, J. Visual Navigation and Landing Control of an Unmanned Aerial Vehicle on a Moving Autonomous Surface Vehicle via Adaptive Learning. IEEE Trans. Neural Netw. Learn. Syst. 2021, 32, 5345–5355. [Google Scholar] [CrossRef] [PubMed]
- Narvaez, E.; Ravankar, A.A.; Ravankar, A.; Kobayashi, Y.; Emaru, T. Vision Based Autonomous Docking of VTOL UAV Using a Mobile Robot Manipulator. In Proceedings of the 2017 IEEE/SICE International Symposium on System Integration (SII), IEEE, Taipei, Taiwan, 11–14 December 2017; pp. 157–163. [Google Scholar]
- Ghommam, J.; Saad, M. Autonomous Landing of a Quadrotor on a Moving Platform. IEEE Trans. Aerosp. Electron. Syst. 2017, 53, 1504–1519. [Google Scholar] [CrossRef]
- Guo, K.; Tang, P.; Wang, H.; Lin, D.; Cui, X. Autonomous Landing of a Quadrotor on a Moving Platform via Model Predictive Control. Aerospace 2022, 9, 34. [Google Scholar] [CrossRef]
- Olson, E. AprilTag: A Robust and Flexible Visual Fiducial System. In Proceedings of the 2011 IEEE International Conference on Robotics and Automation, IEEE, Shanghai, China, 9–13 May 2011; pp. 3400–3407. [Google Scholar]
- Wang, J.; Olson, E. AprilTag 2: Efficient and Robust Fiducial Detection. In Proceedings of the 2016 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), IEEE, Daejeon, Republic of Korea, 9–14 October 2016; pp. 4193–4198. [Google Scholar]
- Krogius, M.; Haggenmiller, A.; Olson, E. Flexible Layouts for Fiducial Tags. In Proceedings of the 2019 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), IEEE, Macau, China, 3–8 November 2019; pp. 1898–1903. [Google Scholar]
- Xu, G.; Qi, X.; Zeng, Q.; Tian, Y.; Guo, R.; Wang, B. Use of Land’s Cooperative Object to Estimate UAV’s Pose for Autonomous Landing. Chin. J. Aeronaut. 2013, 26, 1498–1505. [Google Scholar] [CrossRef]
- Zhenglong, G.; Qiang, F.; Quan, Q. Pose Estimation for Multicopters Based on Monocular Vision and AprilTag. In Proceedings of the 2018 37th Chinese Control Conference (CCC), IEEE, Wuhan, China, 25–27 July 2018; pp. 4717–4722. [Google Scholar]
- Brommer, C.; Malyuta, D.; Hentzen, D.; Brockers, R. Long-Duration Autonomy for Small Rotorcraft UAS Including Recharging. In Proceedings of the 2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), IEEE, Madrid, Spain, 1–5 October 2018; pp. 7252–7258. [Google Scholar]
- Mohammadi, A.; Feng, Y.; Zhang, C.; Rawashdeh, S.; Baek, S. Vision-Based Autonomous Landing Using an MPC-controlled Micro UAV on a Moving Platform. In Proceedings of the 2020 International Conference on Unmanned Aircraft Systems (ICUAS), IEEE, Athens, Greece, 1–4 September 2020; pp. 771–780. [Google Scholar]
- Ji, J.; Yang, T.; Xu, C.; Gao, F. Real-Time Trajectory Planning for Aerial Perching. In Proceedings of the 2022 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Kyoto, Japan, 23–27 October 2022; pp. 10516–10522. [Google Scholar]
- Vlantis, P.; Marantos, P.; Bechlioulis, C.P.; Kyriakopoulos, K.J. Quadrotor Landing on an Inclined Platform of a Moving Ground Vehicle. In Proceedings of the 2015 IEEE International Conference on Robotics and Automation (ICRA), IEEE, Seattle, WA, USA, 26–30 May 2015; pp. 2202–2207. [Google Scholar]
- Baca, T.; Hert, D.; Loianno, G.; Saska, M.; Kumar, V. Model Predictive Trajectory Tracking and Collision Avoidance for Reliable Outdoor Deployment of Unmanned Aerial Vehicles. In Proceedings of the 2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), IEEE, Madrid, Spain, 1–5 October 2018; pp. 6753–6760. [Google Scholar]
- Baca, T.; Stepan, P.; Spurny, V.; Hert, D.; Penicka, R.; Saska, M.; Thomas, J.; Loianno, G.; Kumar, V. Autonomous Landing on a Moving Vehicle with an Unmanned Aerial Vehicle. J. Field Robot. 2019, 36, 874–891. [Google Scholar] [CrossRef]
- Paris, A.; Lopez, B.T.; How, J.P. Dynamic Landing of an Autonomous Quadrotor on a Moving Platform in Turbulent Wind Conditions. In Proceedings of the 2020 IEEE International Conference on Robotics and Automation (ICRA), Paris, France, 31 May–31 August 2020; pp. 9577–9583. [Google Scholar]
- Rodriguez-Ramos, A.; Sampedro, C.; Bavle, H.; Milosevic, Z.; Garcia-Vaquero, A.; Campoy, P. Towards Fully Autonomous Landing on Moving Platforms for Rotary Unmanned Aerial Vehicles. In Proceedings of the 2017 International Conference on Unmanned Aircraft Systems (ICUAS), IEEE, Miami, FL, USA, 13–16 June 2017; pp. 170–178. [Google Scholar]
- Falanga, D.; Zanchettin, A.; Simovic, A.; Delmerico, J.; Scaramuzza, D. Vision-Based Autonomous Quadrotor Landing on a Moving Platform. In Proceedings of the 2017 IEEE International Symposium on Safety, Security and Rescue Robotics (SSRR), IEEE, Shanghai, China, 11–13 October 2017; pp. 200–207. [Google Scholar]
- Faessler, M.; Franchi, A.; Scaramuzza, D. Differential Flatness of Quadrotor Dynamics Subject to Rotor Drag for Accurate Tracking of High-Speed Trajectories. IEEE Robot. Autom. Lett. 2018, 3, 620–626. [Google Scholar] [CrossRef]
- Lee, T.; Leok, M.; McClamroch, N.H. Geometric Tracking Control of a Quadrotor UAV on SE(3). In Proceedings of the 49th IEEE Conference on Decision and Control (CDC), IEEE, Atlanta, GA, USA, 15–17 December 2010; pp. 5420–5425. [Google Scholar]
- Meier, L.; Honegger, D.; Pollefeys, M. PX4: A Node-Based Multithreaded Open Source Robotics Framework for Deeply Embedded Platforms. In Proceedings of the 2015 IEEE International Conference on Robotics and Automation (ICRA), IEEE, Seattle, WA, USA, 26–30 May 2015; pp. 6235–6240. [Google Scholar]
- Sun Yang, C.M.; Junqiang, B. Trajectory planning and control for micro-quadrotor perching on vertical surface. Acta Aeronaut. Astronaut. Sin. 2022, 43, 325756. [Google Scholar]
- Koubaa, A. Robot Operating System (ROS): The Complete Reference (Volume 2). In Studies in Computational Intelligence; Springer International Publishing: Cham, Switzerland, 2017; Volume 707. [Google Scholar]
- Baca, T.; Loianno, G.; Saska, M. Embedded Model Predictive Control of Unmanned Micro Aerial Vehicles. In Proceedings of the 2016 21st International Conference on Methods and Models in Automation and Robotics (MMAR), IEEE, Miedzyzdroje, Poland, 29 August–1 September 2016; pp. 992–997. [Google Scholar]
- Ardakani, M.M.G.; Olofsson, B.; Robertsson, A.; Johansson, R. Real-Time Trajectory Generation Using Model Predictive Control. In Proceedings of the 2015 IEEE International Conference on Automation Science and Engineering (CASE), IEEE, Gothenburg, Sweden, 24–28 August 2015; pp. 942–948. [Google Scholar]
- Cagienard, R.; Grieder, P.; Kerrigan, E.; Morari, M. Move Blocking Strategies in Receding Horizon Control. J. Process. Control 2007, 17, 563–570. [Google Scholar] [CrossRef]
- Janabi-Sharifi, F.; Marey, M. A Kalman-Filter-Based Method for Pose Estimation in Visual Servoing. IEEE Trans. Robot. 2010, 26, 9. [Google Scholar] [CrossRef]
- Mattingley, J.; Boyd, S. CVXGEN: A code generator for embedded convex optimization. Optim. Eng. 2012, 13, 1–27. [Google Scholar] [CrossRef]
- Mattingley, J.; Yang, W.; Boyd, S. Code generation for receding horizon control. In Proceedings of the 2010 IEEE International Symposium on Computer-Aided Control System Design (CACSD), Yokohama, Japan, 8–10 September 2010. [Google Scholar]
- Horla, D.; Hamandi, M.; Giernacki, W.; Franchi, A. Optimal Tuning of the Lateral-Dynamics Parameters for Aerial Vehicles with Bounded Lateral Force. IEEE Robot. Autom. Lett. 2021, 6, 3949–3955. [Google Scholar] [CrossRef]
- Shen, Z.; Ma, Y.; Tsuchiya, T. Stability Analysis of a Feedback-linearization-based Controller with Saturation: A Tilt Vehicle with the Penguin-inspired Gait Plan. arXiv 2021, arXiv:2111.14456. [Google Scholar]
- Du, D.; Chang, M.; Bai, J.; Xia, L. Autonomous Recovery System of Aerial Child-Mother Unmanned Systems Based on Visual Positioning. In Proceedings of the 2022 International Conference on Autonomous Unmanned Systems (ICAUS 2022), Online Event, 22–26 May 2022; Fu, W., Gu, M., Niu, Y., Eds.; Springer Nature Singapore: Singapore, 2023; pp. 1787–1797. [Google Scholar]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Error Direction | Positon Error Limit |
|---|---|
| x | m |
| y | m |
| z | 0.1 m |
| MPC Trajectory Generator | |
|---|---|
| T | 40 |
| Trajectory tracking controller | |
| The child UAV | |
|---|---|
| 1 | |
| 25 | |
| The mother UAV | |
| 5 | |
| Controller | ErrorType | x | y | z |
|---|---|---|---|---|
| Considering drag | 0.176 | 0.113 | 0.042 | |
| 0.391 | 0.303 | 0.142 | ||
| Not considering drag | ||||
| ErrorType | x | y | z | |
|---|---|---|---|---|
| Trajectory tracking | ||||
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Du, D.; Chang, M.; Tang, L.; Zou, H.; Tang, C.; Bai, J. Trajectory Planning and Control Design for Aerial Autonomous Recovery of a Quadrotor. Drones 2023, 7, 648. https://doi.org/10.3390/drones7110648
Du D, Chang M, Tang L, Zou H, Tang C, Bai J. Trajectory Planning and Control Design for Aerial Autonomous Recovery of a Quadrotor. Drones. 2023; 7(11):648. https://doi.org/10.3390/drones7110648
Chicago/Turabian StyleDu, Dongyue, Min Chang, Linkai Tang, Haodong Zou, Chu Tang, and Junqiang Bai. 2023. "Trajectory Planning and Control Design for Aerial Autonomous Recovery of a Quadrotor" Drones 7, no. 11: 648. https://doi.org/10.3390/drones7110648
APA StyleDu, D., Chang, M., Tang, L., Zou, H., Tang, C., & Bai, J. (2023). Trajectory Planning and Control Design for Aerial Autonomous Recovery of a Quadrotor. Drones, 7(11), 648. https://doi.org/10.3390/drones7110648