
Integrating a UAV System Based on Pixhawk with a Laser Methane Mini Detector to Study Methane Emissions



Abstract
:1. Introduction
2. Materials and Methods
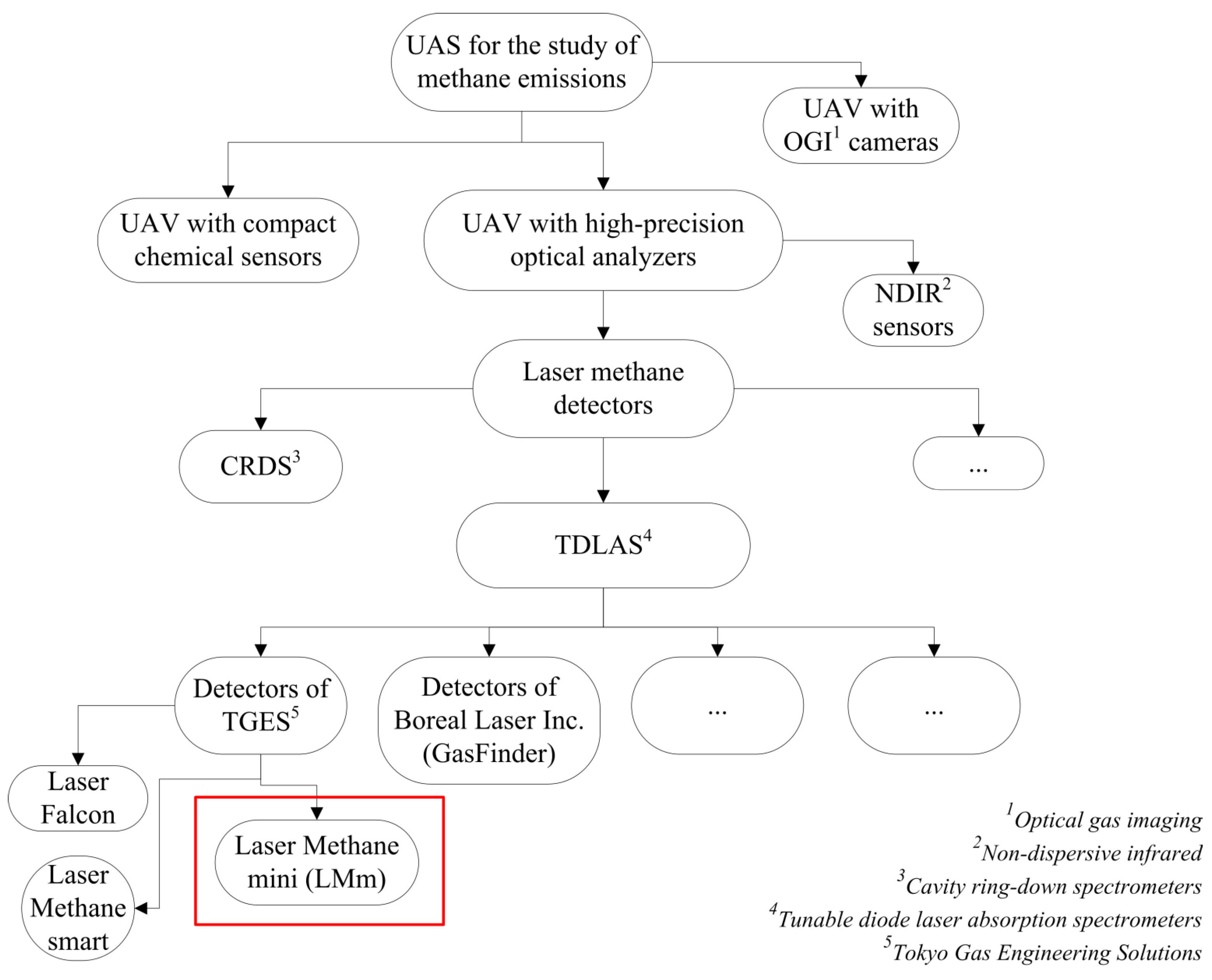
2.1. Selection of a Sensor for Methane Detection
- Atmospheric sampling using onboard equipment followed by sample analysis with surface instruments;
- Analysis of air samples in real time by pumping them into a long tube connected to a ground analyzer;
- Real-time measurements taken directly with onboard instruments.
2.2. Selection of a UAV
2.3. Test Objects for the UAS
3. Results
3.1. Review of Existing Non-Serial Solutions
3.2. An Example of a Serial Solution—The SkyHub System (SPH Engineering)

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| UAV (Brand, Type) | Autopilot | Methane Detector | Detector Modification | Detector Mounting Method | Additional on-Board Equipment | Method for Combining Methane Detector Data with the Coordinates of Measurements | Research |
|---|---|---|---|---|---|---|---|
| Custom-made (quadcopter) | Custom-made (ARM processor based) | Experimental TDLAS-detector | N/A | No data | No | Via the flight controller | [14] |
| Custom-made (hexacopter) | Pixhawk | LMm | No | General circuit board | microprocessor, Android device | Methane detector data were transmitted via Bluetooth to an Android device and georeferenced using a separate onboard microprocessor | [3] |
| DJI Spread Wings S1000 (octocopter) | DJI WooKong—M | LMm | No | Aluminum mounting plate | Smartphone | Methane detector data were transmitted via Bluetooth to an Android smartphone and combined with flight controller GNSS data during post-processing | [17] |
| Custom-made (quadcopter) | No data | Remote Methane Laser Detector | Customization (including GNSS sensor integration) | No data | No | Via the methane detector | [1] |
| 3DR Solo (quadcopter) | Pixhawk 2 | LMm | No | Vibration-dampening 3D-printed plastic mount | Android device | Methane detector data were transmitted via Bluetooth to an Android device, where it was combined with GPS data built into the Android device | [4] |
| DJI Matrice 210 (quadcopter) | No data | Aeris MIRA Pico | Deep customization | No data | GNSS sensor, logger | Via the logger | [16] |
| DJI Matrice 600 Pro (hexacopter) | DJI A3 Pro | LMm | No | No data | Smartphone | Methane detector data transmitted via Bluetooth to an Android device, combined with inbuilt GPS data | [18] |
| DJI Spreading Wings S1000 (octocopter) | DJI A3 Pro | LMm | Deep customization | DJI Zenmuse Z15-A7 upgraded gimbal | Computing unit, microcontroller board, altimeter | Data were transmitted via UART interfaces, then combined using a computing unit and a microcontroller | [19,20] |
| DJI Matrice 600 Pro (hexacopter) | DJI A3 Pro | Experimental QCLAS * | N/A | Fixed frame mount | RTK-GNSS-sensor | RTK-GNSS sensor data was combined with detector data during post-processing | [7] |
- UgCS Custom Payload Monitor (SPH Engineering)—for setting up aerial gas survey capabilities and obtaining data on methane concentration measurements in real time;
- WinSCP (developed by Martin Prikryl)—an open-source file management program for downloading data from SkyHub after the flight via Wi-Fi;
- LMC Process (JSC Pergam-Engineering)—for reading and primary processing gas survey data.
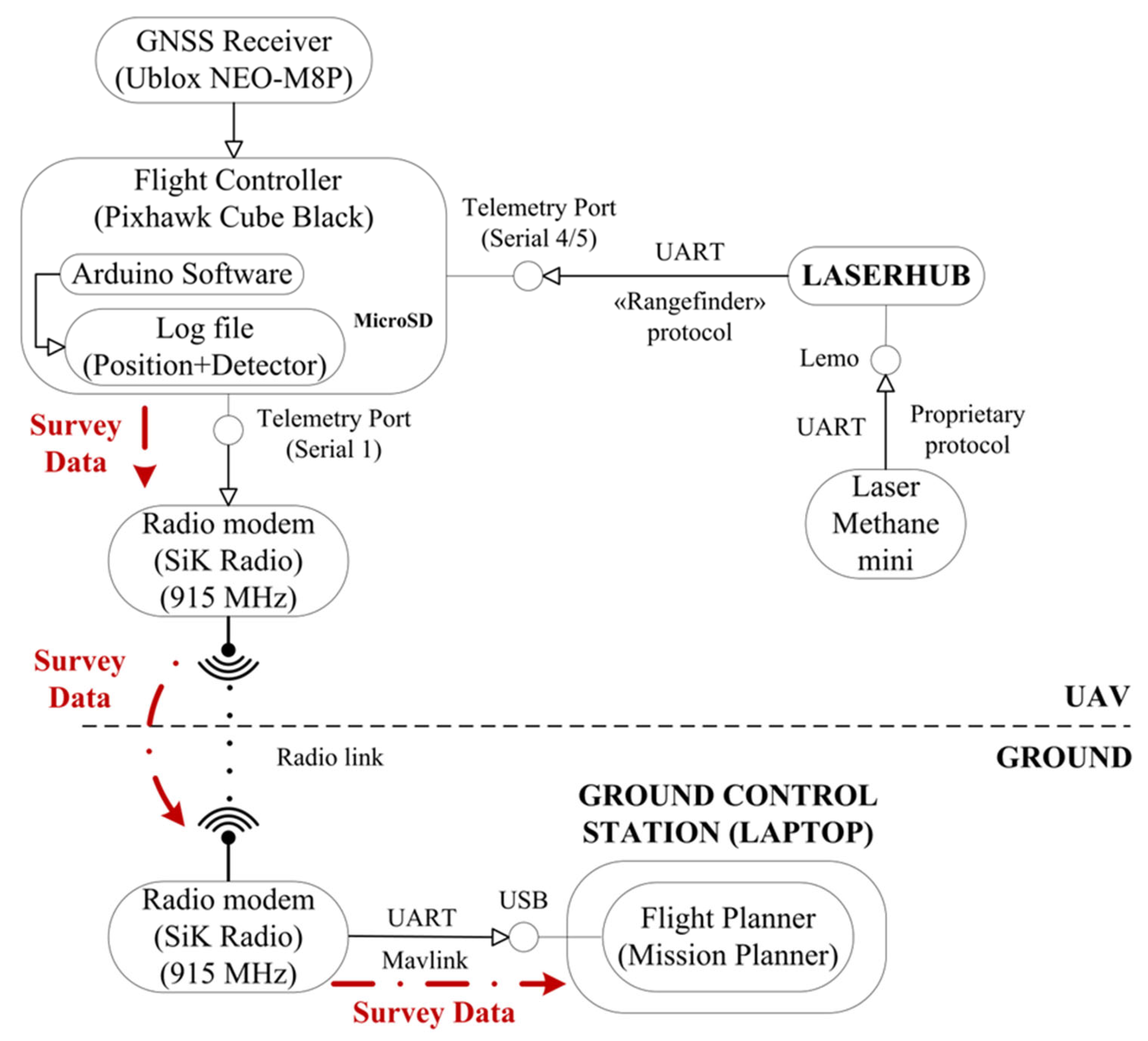
3.3. Research Results
- SERIAL4_PROTOCOL = 9 (Lidar);
- SERIAL4_BAUD = 115 (115,200 baud);
- RNGFND1_TYPE = 20 (Benewake-Serial);
- RNGFND1_MIN_CM = 0.
- Submit a data request to the LMm. A 13-byte string is used as a request (it is sent at a frequency of 2 Hz):x «{\x02}ETC:FWD ?; {\x03}{\x26}»
- Wait for a response from the LMm. The response line (295 bytes) must begin with the sequence:«{\x02}ETC:FWD»
- In the response line, read bytes 47–51 containing the desired value.
- Convert the read data to a numeric type.
- The top byte for the send array is obtained:TopByte = (GasAnalyzerValue >> 8) & 0b11111111
- The low byte for the send array is calculated:LowByte = GasAnalyzerValue & 0b11111111
- The check byte is calculated:CheckByte = (0x59 + 0x59 + TopByte + LowByte) & 0b11111111
- An array (9 bytes) is formed to be sent to the autopilot:Array [0]: 0x59
Array [1]: 0x59
Array [2]: LowByte
Array [3]: TopByte
Array [4]: 0x00
Array [5]: 0x00
Array [6]: 0x00
Array [7]: 0x00
Array [8]: CheckByte - The formed array is sent to the autopilot at a frequency of 100 Hz.
4. Discussion
5. Conclusions
Supplementary Materials
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Yang, S.; Talbot, R.; Frish, M.; Golston, L.; Aubut, N.; Zondlo, M.; Gretencord, C.; McSpiritt, J. Natural Gas Fugitive Leak Detection Using an Unmanned Aerial Vehicle: Measurement System Description and Mass Balance Approach. Atmosphere 2018, 9, 383. [Google Scholar] [CrossRef]
- Golston, L.; Aubut, N.; Frish, M.; Yang, S.; Talbot, R.; Gretencord, C.; McSpiritt, J.; Zondlo, M. Natural Gas Fugitive Leak Detection Using an Unmanned Aerial Vehicle: Localization and Quantifification of Emission Rate. Atmosphere 2018, 9, 333. [Google Scholar] [CrossRef]
- Emran, B.; Tannant, D.; Najjaran, H. Low-altitude aerial methane concentration mapping. Remote Sens. 2017, 9, 823–835. [Google Scholar] [CrossRef]
- Oberle, F.; Gibbs, A.; Richmond, B.; Erikson, L.; Waldrop, M.; Swarzenski, P. Towards determining spatial methane distribution on Arctic permafrost bluffs with an unmanned aerial system. SN Appl. Sci. 2019, 1, 236. [Google Scholar] [CrossRef]
- Shaw, J.; Shah, A.; Yong, H.; Allen, G. Methods for quantifying methane emissions using unmanned aerial vehicles: A review. Philos. Trans. A Math. Phys. Eng. Sci. 2021, 379, 20200450. [Google Scholar] [CrossRef]
- Hollenbeck, D.; Dahabra, M.; Christensen, L.; Chen, Y. Data Quality Aware Flight Mission Design for Fugitive Methane Sniffifing using Fixed Wing sUAS. In Proceedings of the International Conference on Unmanned Aircraft Systems (ICUAS), Atlanta, GA, USA, 11–14 June 2019. [Google Scholar]
- Morales, R.; Ravelid, J.; Vinkovic, K.; Korbeń, P.; Tuzson, B.; Emmenegger, L.; Chen, H.; Schmidt, M.; Humbel, S.; Brunner, D. Controlled-release experiment to investigate uncertainties in UAV-based emission quantification for methane point sources. Atmos. Meas. Tech. 2022, 15, 2177–2198. [Google Scholar] [CrossRef]
- Burgues, J.; Marco, S. Environmental chemical sensing using small drones: A review. Sci. Total Environ. 2020, 748, 141172. [Google Scholar] [CrossRef]
- Hollenbeck, D.; Zulevic, D.; Chen, Y. Advanced Leak Detection and Quantifification of Methane Emissions Using sUAS. Drones 2021, 5, 117. [Google Scholar] [CrossRef]
- Jonca, J.; Pawnuk, M.; Bezyk, Y.; Arsen, A.; Sowka, I. Drone-Assisted Monitoring of Atmospheric Pollution—A Comprehensive Review. Sustainability 2022, 14, 11516. [Google Scholar] [CrossRef]
- Uehara, K.; Tai, H. Remote detection of methane with a 166-μm diode laser. Appl. Opt. 1992, 31, 809–814. [Google Scholar] [CrossRef] [PubMed]
- Mønster, J.; Kjeldsen, P.; Scheutz, C. Methodologies for measuring fugitive methane emissions from landfills—A review. Waste Manag. 2019, 87, 835–859. [Google Scholar] [CrossRef]
- Francis, A.; Li, S.; Griffiths, C.; Sienz, J. Gas source localization and mapping with mobile robots: A review. J. Field Robot. 2022, 39, 1341–1377. [Google Scholar] [CrossRef]
- Picciaia, D.; Zazzeri, G.; Gimberini, M.; Andreussi, P. New remote sensing method for landfifill emissions quantifification. In Sardinia 2011—13th International Waste Management and Landfill Symposium; CISA Publisher: Cagliari, Italy, 2011. [Google Scholar]
- Gargiulo, G.; Martin, A. Detection of landfill gas emissions using drones. In Proceedings of the 24th International Clean Air and Environment Conference—CASANZ19, Queenstown, New Zealand, 16–18 September 2019. [Google Scholar]
- Galfalk, M.; Paledal, S.; Bastviken, D. Sensitive Drone Mapping of Methane Emissions without the Need for Supplementary Ground-Based Measurements. ACS Earth Space Chem. 2021, 5, 2668–2676. [Google Scholar] [CrossRef] [PubMed]
- Tannant, D.; Zheng, W.; Smith, K.; Cahill, A. Evaluation of a Drone and Laser-Based Methane Sensor for Detection of a Surface Release of Methane. University of British Columbia: Vancouver, BC, Canada, 2018. Available online: https://www.researchgate.net/publication/330144901_Evaluation_of_a_Drone_and_Laser-Based_Methane_Sensor_for_Detection_of_Fugitive_Methane_Emissions_DRAFT_submitted_to_BC_Oil_and_Gas_Research_and_Innovation_Society (accessed on 28 August 2023).
- Iwaszenko, S.; Kalisz, P.; Słota, M.; Rudzki, A. Detection of Natural Gas Leakages Using a Laser-Based Methane Sensor and UAV. Remote Sens. 2021, 13, 510. [Google Scholar] [CrossRef]
- Neumann, P.; Kohlhoff, H.; Hüllmann, D.; Krentel, D.; Kluge, M.; Dzierlinski, M.; Lilienthal, A.; Bartholmai, M. Aerial-based gas tomography—From single beams to complex gas distributions. Eur. J. Remote Sens. 2019, 52, 2–16. [Google Scholar] [CrossRef]
- Neumann, P.; Hullmann, D.; Winkler, N.; Schugardt, J. Remote Drone-to-Drone Gas Sensing: A Feasibility Study. In Proceedings of the IEEE International Symposium on Olfaction and Electronic Nose (ISOEN), Aveiro, Portugal, 29 May–1 June 2022. [Google Scholar] [CrossRef]
- UgCS SkyHub User Manual. Available online: https://integrated.ugcs.com/dl/docs/skyhub-user-manual-r9.pdf (accessed on 28 August 2023).
- Benewake TF02/TF03 lidar/TF-Luna. Available online: https://ardupilot.org/copter/docs/common-benewake-tf02-lidar.html (accessed on 28 August 2023).
- SPH Engineering. Available online: https://shop.ugcs.com/collections/ugcs-integrated-systems (accessed on 28 August 2023).







| Parameter | SkyHub | LaserHub+ |
|---|---|---|
| Weight 1, g | 200 | 49 2 |
| Dimensions, L × W × H, mm | 109 × 69 × 34 | 54 × 54 × 30 |
| Power consumption 3, W | 1.7 (3.0 4) | 0.1 |
| Required software | UgCS SkyHub (onboard software), UgCS UCS, UgCS Custom Payload Monitor, Mission Planner | Mission Planner |
| Cost for hardware, € | 2560 5 | 25 |
| Cost for software (incl. licenses), € | 4340 5 | Not applicable 6 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Filkin, T.; Lipin, I.; Sliusar, N. Integrating a UAV System Based on Pixhawk with a Laser Methane Mini Detector to Study Methane Emissions. Drones 2023, 7, 625. https://doi.org/10.3390/drones7100625
Filkin T, Lipin I, Sliusar N. Integrating a UAV System Based on Pixhawk with a Laser Methane Mini Detector to Study Methane Emissions. Drones. 2023; 7(10):625. https://doi.org/10.3390/drones7100625
Chicago/Turabian StyleFilkin, Timofey, Iliya Lipin, and Natalia Sliusar. 2023. "Integrating a UAV System Based on Pixhawk with a Laser Methane Mini Detector to Study Methane Emissions" Drones 7, no. 10: 625. https://doi.org/10.3390/drones7100625
APA StyleFilkin, T., Lipin, I., & Sliusar, N. (2023). Integrating a UAV System Based on Pixhawk with a Laser Methane Mini Detector to Study Methane Emissions. Drones, 7(10), 625. https://doi.org/10.3390/drones7100625