
Autonomous Surveying of Plantation Forests Using Multi-Rotor UAVs


Abstract
:1. Introduction
- A method for online waypoint placement for autonomous coverage planning in plantation forests
- A nonlinear optimization-based trajectory generation method to rapidly plan constant-speed, dynamically feasible, and safe trajectories within complex environments
- Experimental flight testing results in both simulation and a local plantation forest to verify the proposed method
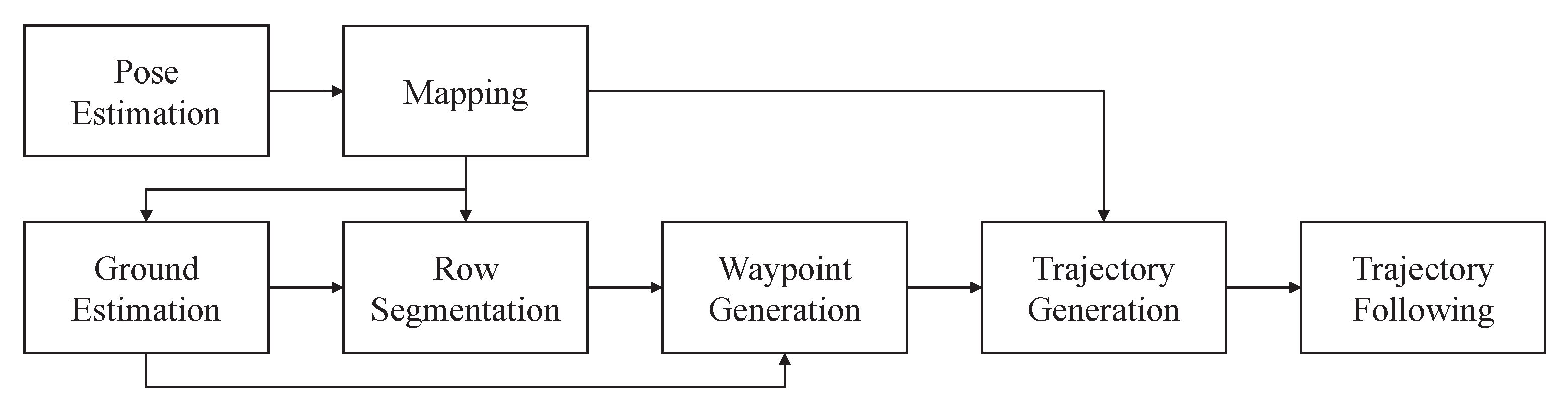
2. Materials and Methods
2.1. Waypoint Generation
2.2. Trajectory Generation
2.3. Trajectory Following
2.4. Runtime
3. Simulation Tests
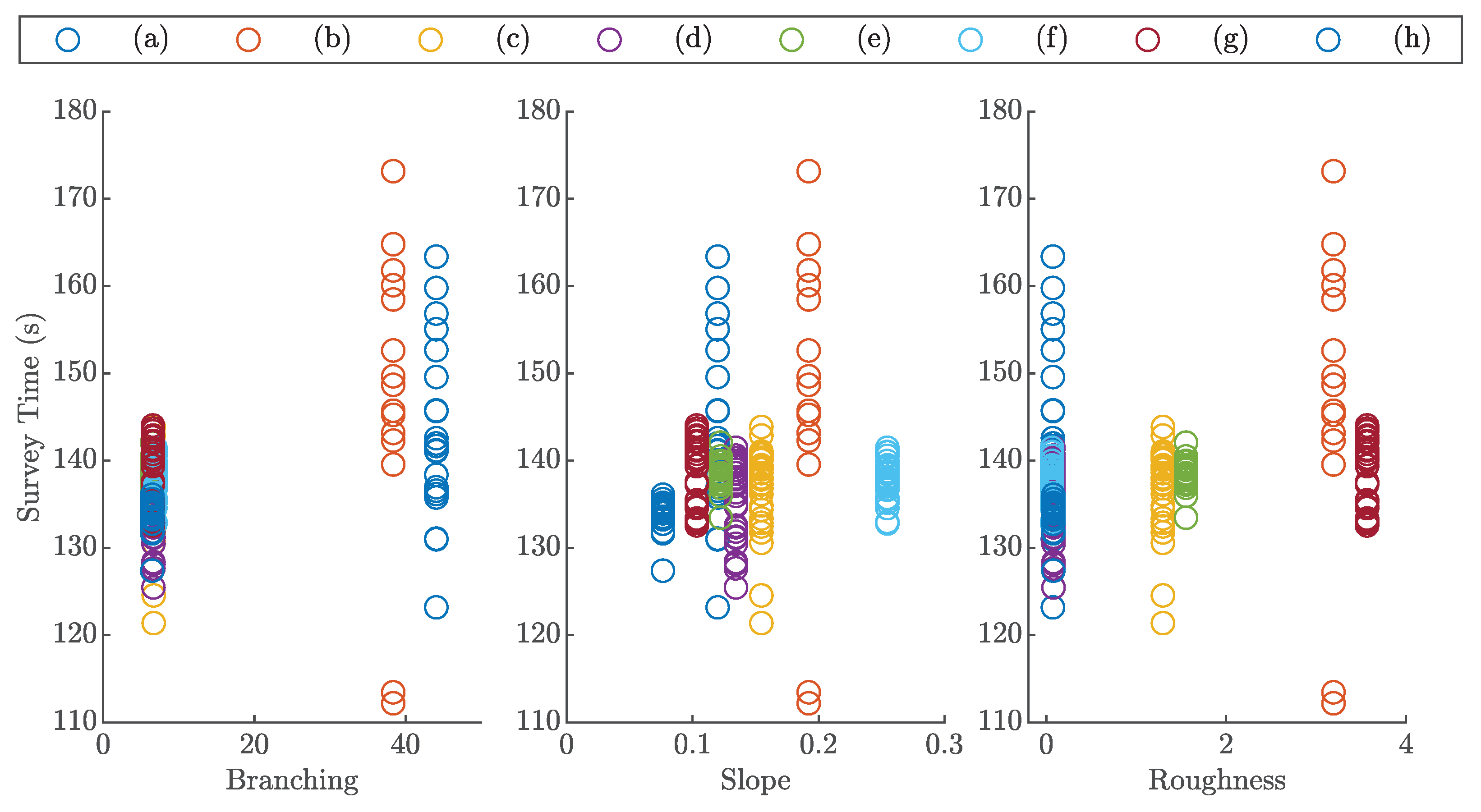
3.1. Branching
3.2. Slope and Roughness
3.3. Simulation Environments
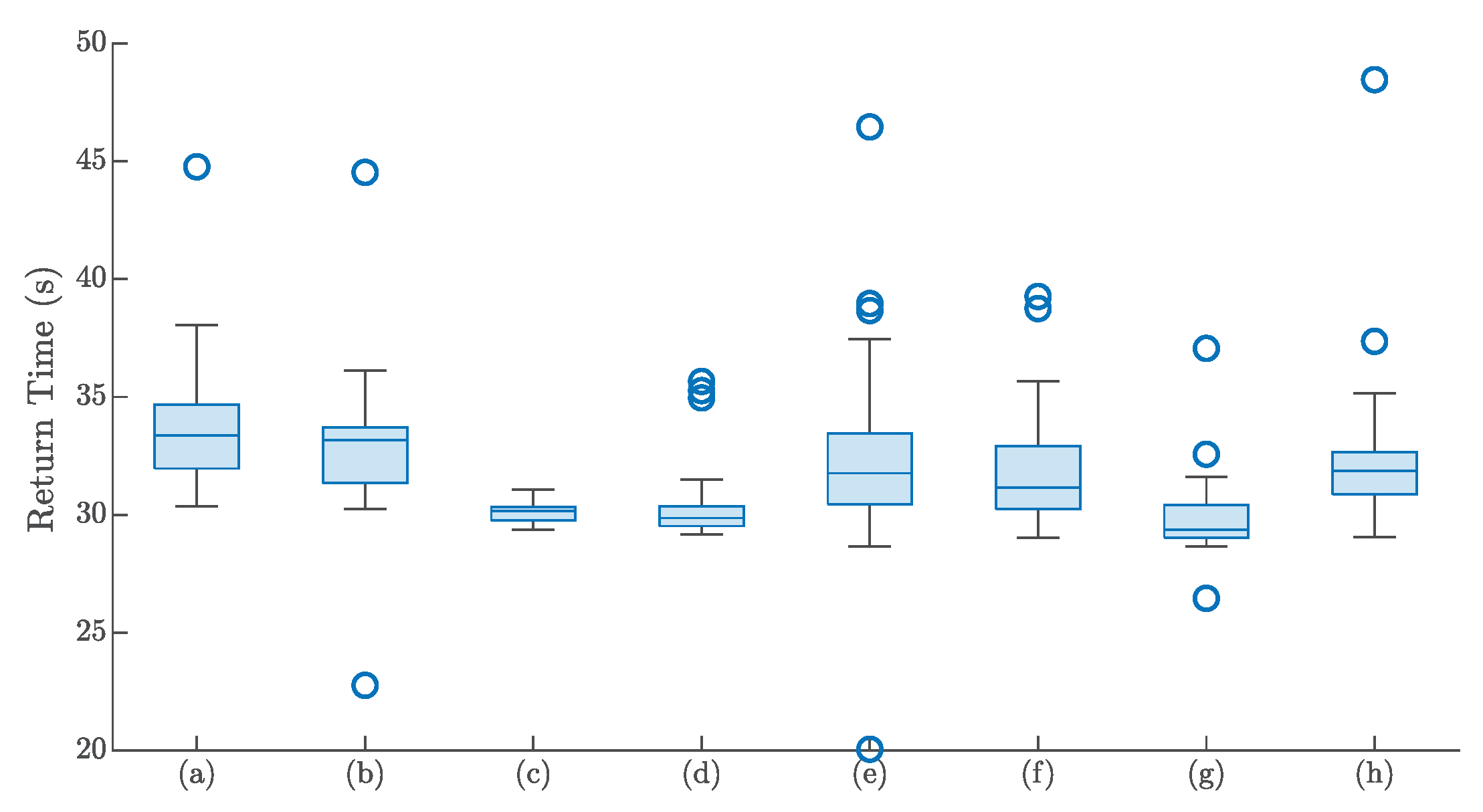
3.4. Survey Time
3.5. Coverage
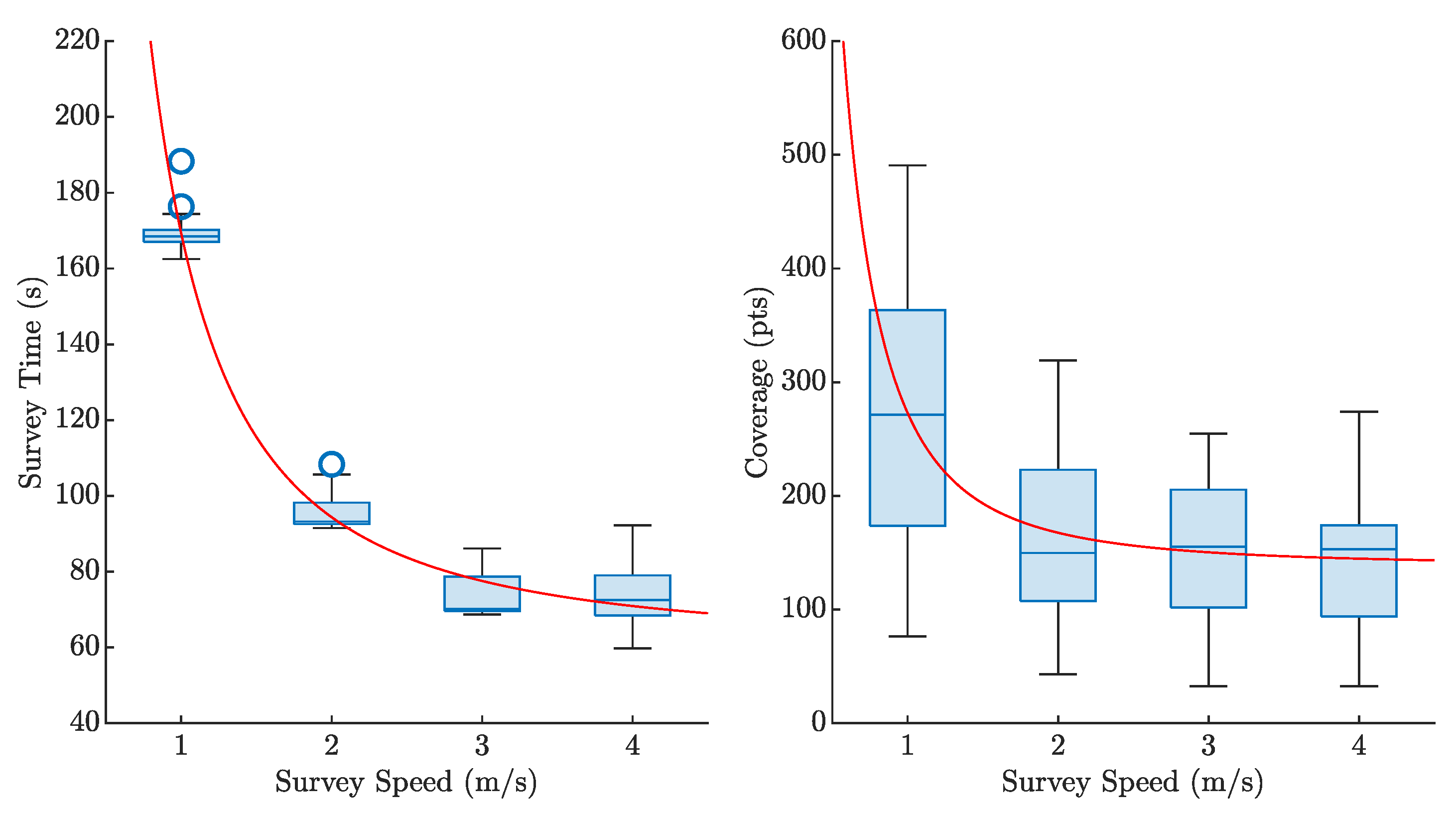
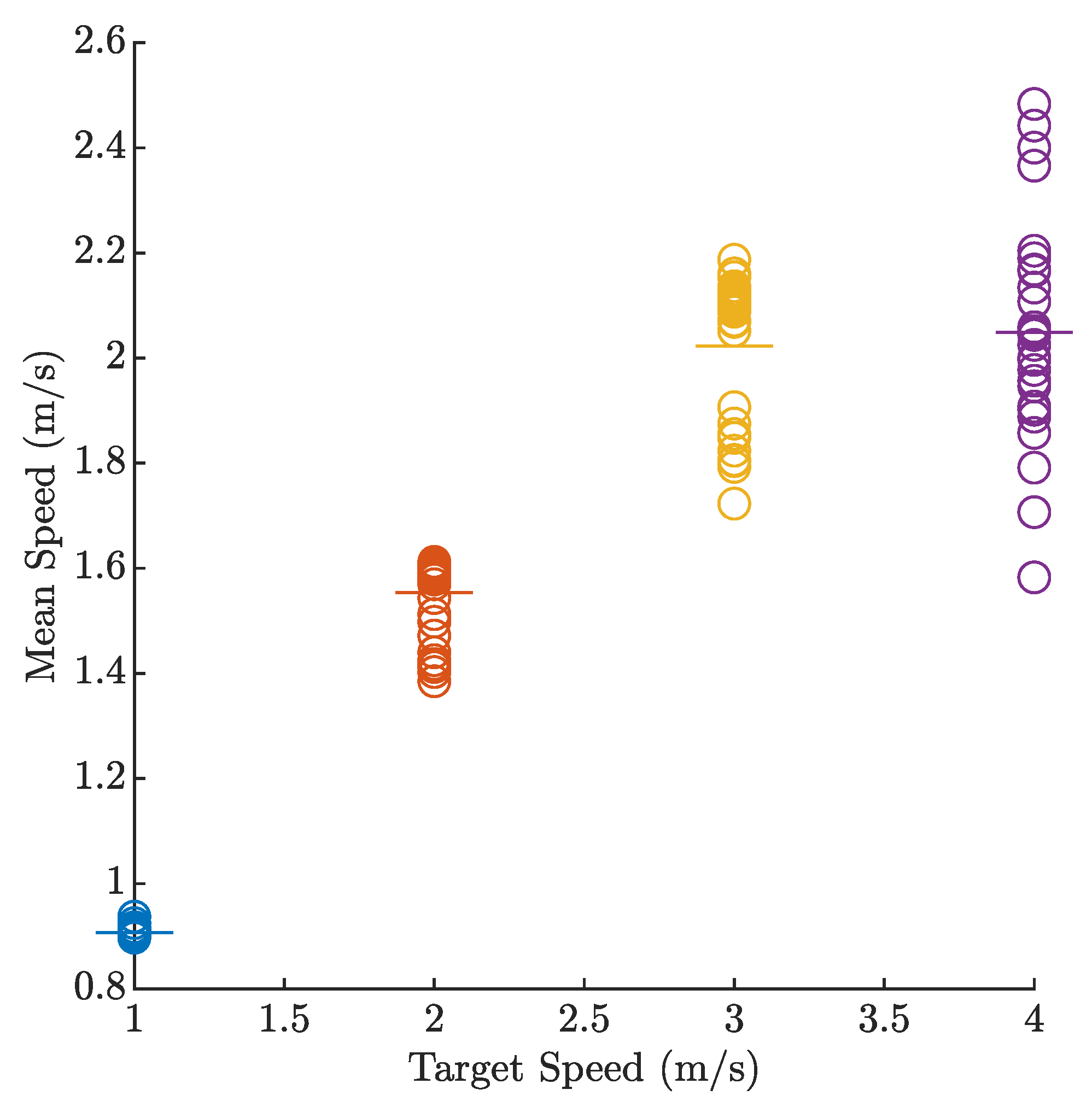
3.6. Effects of Survey Speed
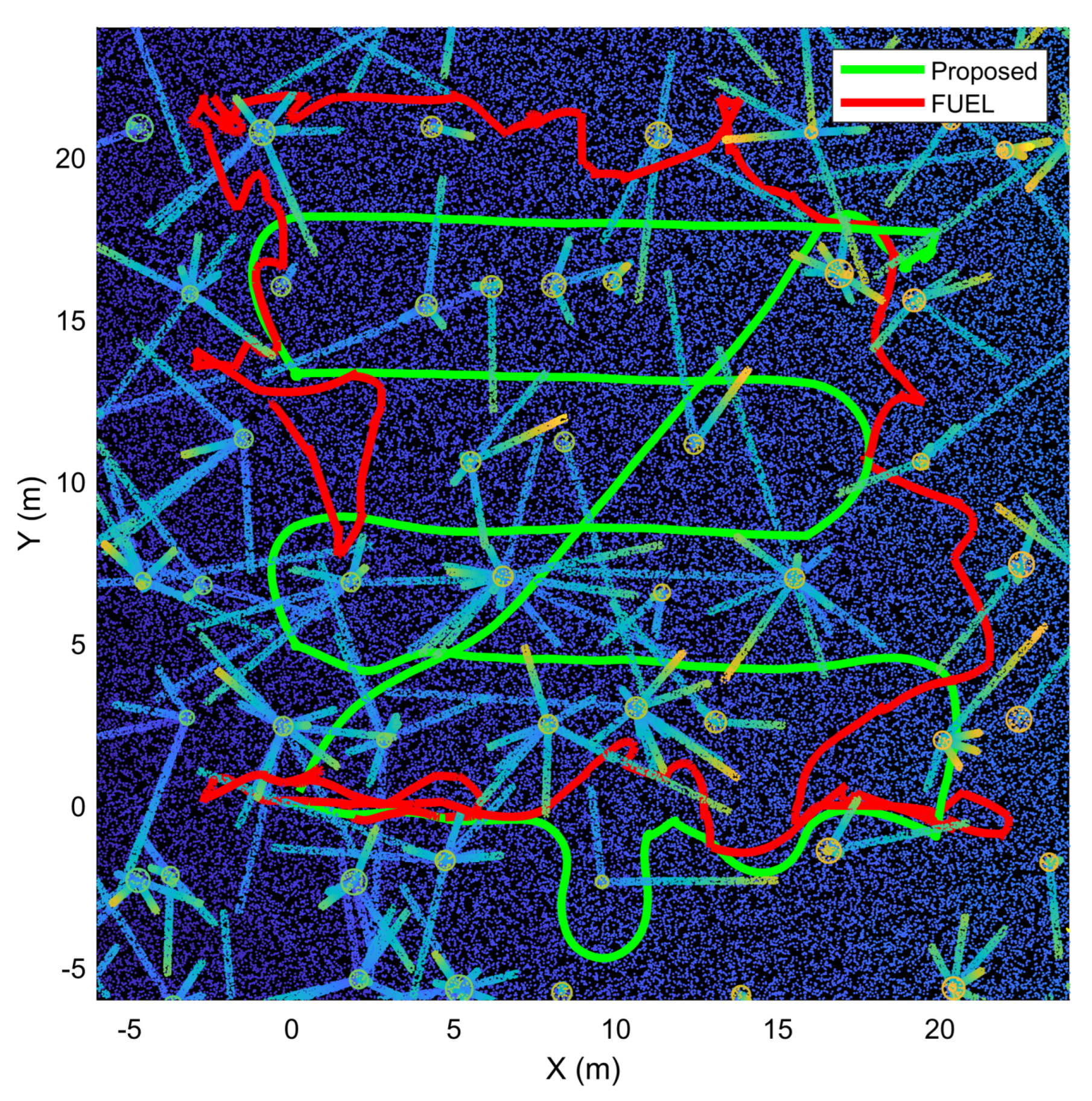
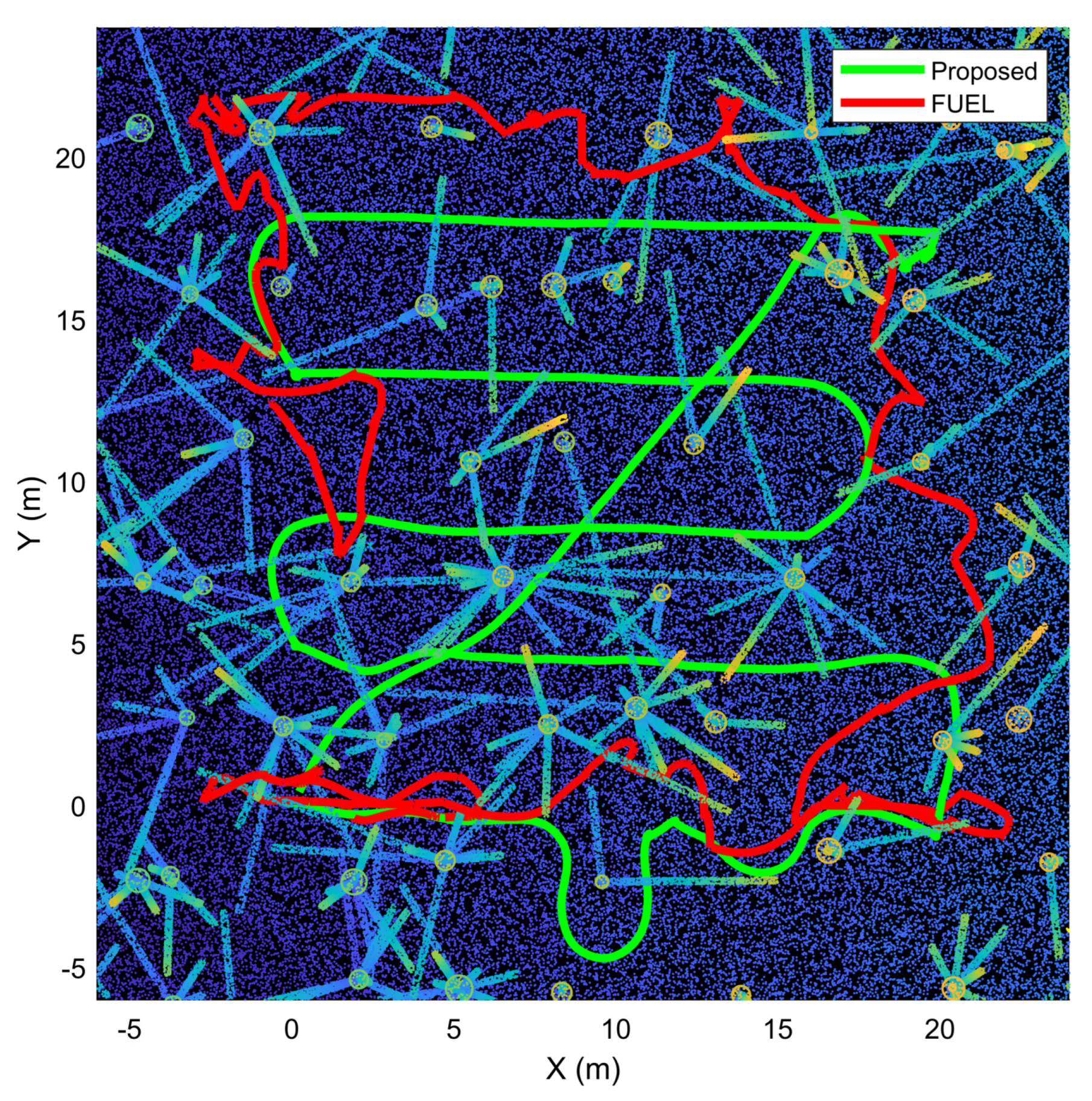
3.7. Comparison to Existing Methods
4. Flight Tests
- Attempted corridors—the number of identified corridors and an attempt to traverse these corridors have been made
- Completed corridors—the number of correctly traversed corridors
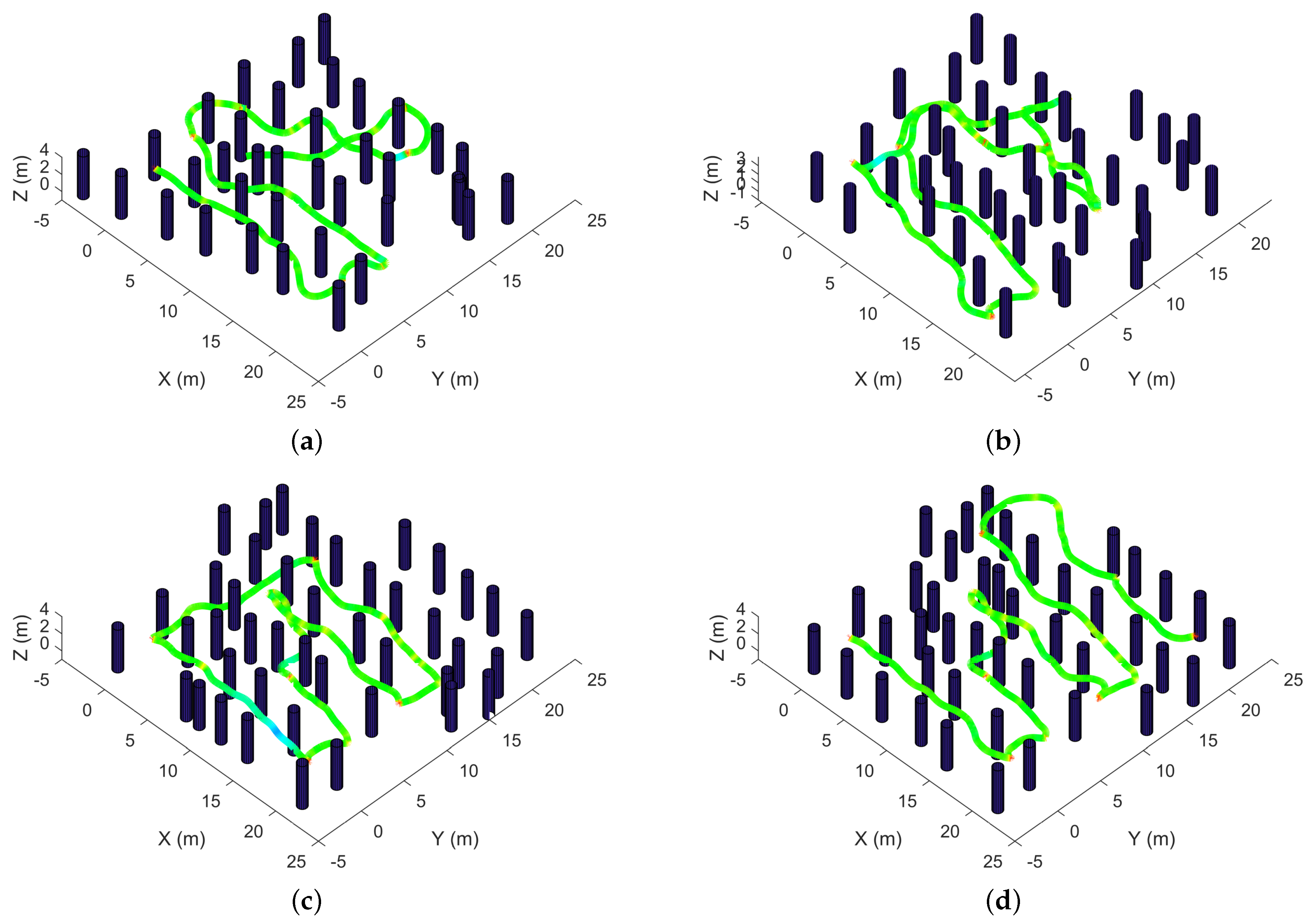
4.1. Large Flights
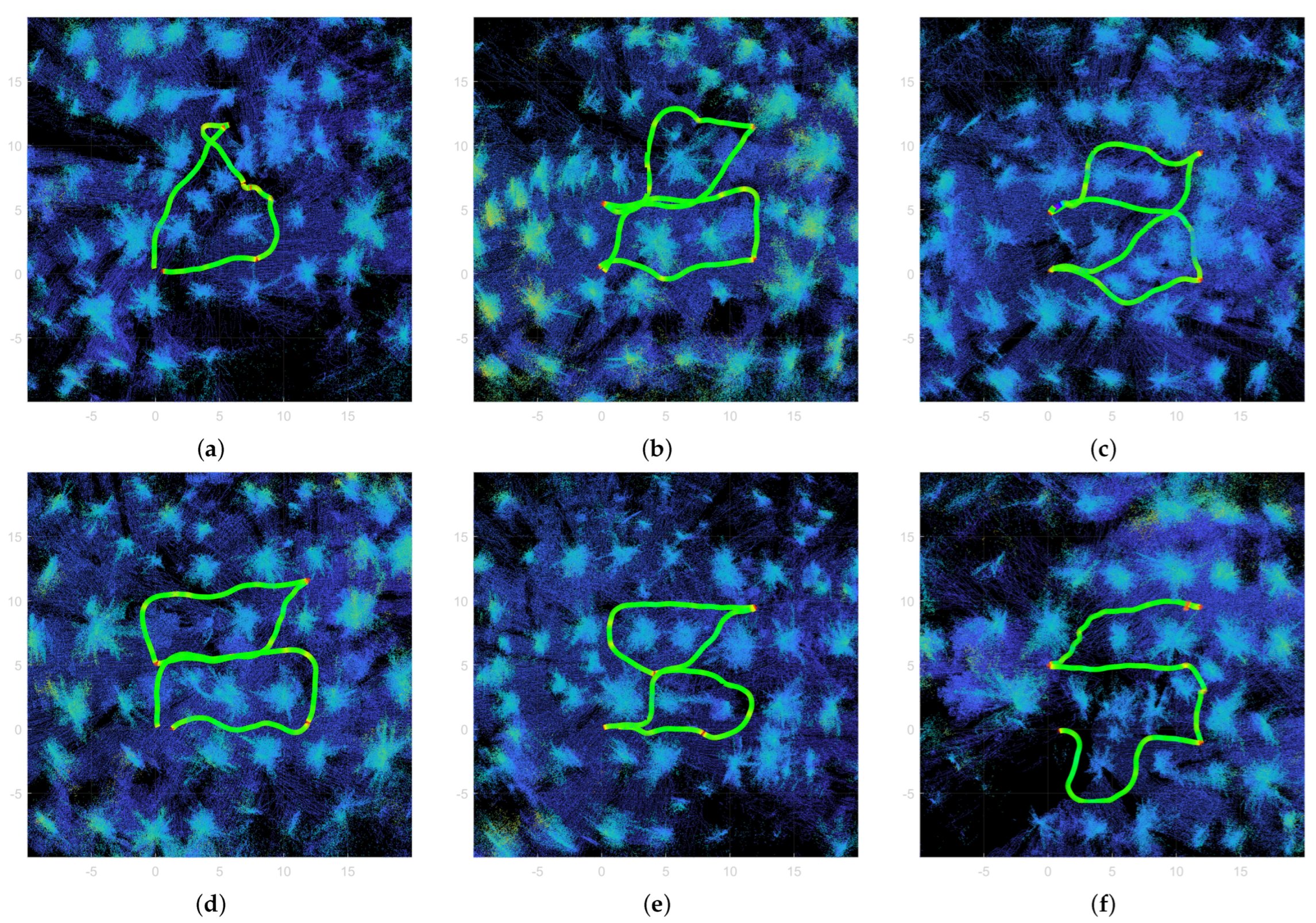
4.2. Small Flights
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Deadman, M.W.; Goulding, C.J. A method for assessment of recoverable volume by log types. N. Z. J. For. Sci. 1979, 9, 225–239. [Google Scholar]
- Interpine Innovation. PlotSafe Overlapping Feature Crusing Forest Inventory Procedures; Interpine Innovation: Rotorua, New Zealand, 2007; p. 49. [Google Scholar]
- Hudak, A.T.; Crookston, N.L.; Evans, J.S.; Hall, D.E.; Falkowski, M.J. Nearest neighbor imputation of species-level, plot-scale forest structure attributes from LiDAR data. Remote Sens. Environ. 2008, 112, 2232–2245. [Google Scholar] [CrossRef]
- Puliti, S.; Dash, J.P.; Watt, M.S.; Breidenbach, J.; Pearse, G.D. A comparison of UAV laser scanning, photogrammetry and airborne laser scanning for precision inventory of small-forest properties. For. Int. J. For. Res. 2020, 93, 150–162. [Google Scholar] [CrossRef]
- Mielcarek, M.; Kamińska, A.; Stereńczak, K. Digital Aerial Photogrammetry (DAP) and Airborne Laser Scanning (ALS) as Sources of Information about Tree Height: Comparisons of the Accuracy of Remote Sensing Methods for Tree Height Estimation. Remote Sens. 2020, 12, 1808. [Google Scholar] [CrossRef]
- Bauwens, S.; Bartholomeus, H.; Calders, K.; Lejeune, P. Forest inventory with terrestrial LiDAR: A comparison of static and hand-held mobile laser scanning. Forests 2016, 7, 127. [Google Scholar] [CrossRef]
- Kukko, A.; Kaijaluoto, R.; Kaartinen, H.; Lehtola, V.V.; Jaakkola, A.; Hyyppä, J. Graph SLAM correction for single scanner MLS forest data under boreal forest canopy. ISPRS J. Photogramm. Remote Sens. 2017, 132, 199–209. [Google Scholar] [CrossRef]
- Wang, Y.; Kukko, A.; Hyyppä, E.; Hakala, T.; Pyörälä, J.; Lehtomäki, M.; El Issaoui, A.; Yu, X.; Kaartinen, H.; Liang, X.; et al. Seamless integration of above- and under-canopy unmanned aerial vehicle laser scanning for forest investigation. For. Ecosyst. 2021, 8, 10. [Google Scholar] [CrossRef]
- Hyyppä, E.; Hyyppä, J.; Hakala, T.; Kukko, A.; Wulder, M.A.; White, J.C.; Pyörälä, J.; Yu, X.; Wang, Y.; Virtanen, J.P.; et al. Under-canopy UAV laser scanning for accurate forest field measurements. ISPRS J. Photogramm. Remote Sens. 2020, 164, 41–60. [Google Scholar] [CrossRef]
- Hyyppä, J.; Yu, X.; Hakala, T.; Kaartinen, H.; Kukko, A.; Hyyti, H.; Muhojoki, J.; Hyyppä, E. Under-Canopy UAV Laser Scanning Providing Canopy Height and Stem Volume Accurately. Forests 2021, 12, 856. [Google Scholar] [CrossRef]
- Del Perugia, B.; Krisanski, S.; Taskhiri, M.S.; Turner, P. Below-canopy UAS photogrammetry for stem measurement in radiata pine plantation. Proc. Remote Sens. Agric. Ecosyst. Hydrol. 2018, 11, 1078309. [Google Scholar] [CrossRef]
- Krisanski, S.; Taskhiri, M.S.; Turner, P. Enhancing Methods for Under-Canopy Unmanned Aircraft System Based Photogrammetry in Complex Forests for Tree Diameter Measurement. Remote Sens. 2020, 12, 1652. [Google Scholar] [CrossRef]
- Kuželka, K.; Surový, P. Mapping Forest Structure Using UAS inside Flight Capabilities. Sensors 2018, 18, 2245. [Google Scholar] [CrossRef] [PubMed]
- Jiang, S. Towards Autonomous Flights of an Unmanned Aerial Vehicle (UAV) in Plantation Forests. Master’s Thesis, The University of Auckland, Auckland, New Zealand, 2016. [Google Scholar]
- Chiella, A.C.B.; Machado, H.N.; Teixeira, B.O.S.; Pereira, G.A.S. GNSS/LiDAR-Based Navigation of an Aerial Robot in Sparse Forests. Sensors 2019, 19, 4061. [Google Scholar] [CrossRef]
- Chisholm, R.A.; Cui, J.; Lum, S.K.Y.; Chen, B.M. UAV LiDAR for below-canopy forest surveys. J. Unmanned Veh. Syst. 2013, 1, 61–68. [Google Scholar] [CrossRef]
- Cui, J.Q.; Lai, S.; Dong, X.; Liu, P.; Chen, B.M.; Lee, T.H. Autonomous navigation of UAV in forest. In Proceedings of the 2014 International Conference on Unmanned Aircraft Systems, ICUAS 2014—Conference Proceedings, Orlando, FL, USA, 27–30 May 2014. [Google Scholar] [CrossRef]
- Thrun, S.; Montemerlo, M. The graph SLAM algorithm with applications to large-scale mapping of urban structures. Int. J. Robot. Res. 2006, 25, 403–429. [Google Scholar] [CrossRef]
- Zucker, M.; Ratliff, N.; Dragan, A.D.; Pivtoraiko, M.; Klingensmith, M.; Dellin, C.M.; Bagnell, J.A.; Srinivasa, S.S. CHOMP: Covariant Hamiltonian optimization for motion planning. Int. J. Robot. Res. 2013, 32, 1164–1193. [Google Scholar] [CrossRef]
- Oleynikova, H.; Burri, M.; Taylor, Z.; Nieto, J.; Siegwart, R.; Galceran, E. Continuous-time trajectory optimization for online UAV replanning. In Proceedings of the IEEE International Conference on Intelligent Robots and Systems 2016, Daejeon, Korea, 9–14 October 2016; pp. 5332–5339. [Google Scholar] [CrossRef]
- Usenko, V.; Von Stumberg, L.; Pangercic, A.; Cremers, D. Real-time trajectory replanning for MAVs using uniform B-splines and a 3D circular buffer. In Proceedings of the IEEE International Conference on Intelligent Robots and Systems, Vancouver, BC, Canada, 24–28 September 2017; pp. 215–222. [Google Scholar] [CrossRef]
- Zhou, B.; Pan, J.; Gao, F.; Shen, S. RAPTOR: Robust and Perception-Aware Trajectory Replanning for Quadrotor Fast Flight. IEEE Trans. Robot. 2021, 37, 1992–2009. [Google Scholar] [CrossRef]
- Mellinger, D.; Kumar, V. Minimum snap trajectory generation and control for quadrotors. In Proceedings of the IEEE International Conference on Robotics and Automation, Shanghai, China, 9–13 May 2011; pp. 2520–2525. [Google Scholar] [CrossRef]
- Tordesillas, J.; Lopez, B.T.; How, J.P. FASTER: Fast and Safe Trajectory Planner for Flights in Unknown Environments. In Proceedings of the 2019 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Macau, China, 3–8 November 2019; pp. 1934–1940. [Google Scholar] [CrossRef]
- Deits, R.; Tedrake, R. Efficient mixed-integer planning for UAVs in cluttered environments. In Proceedings of the IEEE International Conference on Robotics and Automation, Seattle, WA, USA, 26–30 May 2015; pp. 42–49. [Google Scholar] [CrossRef]
- Gao, F.; Wang, L.; Zhou, B.; Zhou, X.; Pan, J.; Shen, S. Teach-Repeat-Replan: A Complete and Robust System for Aggressive Flight in Complex Environments. IEEE Trans. Robot. 2020, 36, 1526–1545. [Google Scholar] [CrossRef]
- Meng, Z.; Qin, H.; Chen, Z.; Chen, X.; Sun, H.; Lin, F.; Ang, M.H. A Two-Stage Optimized Next-View Planning Framework for 3-D Unknown Environment Exploration, and Structural Reconstruction. IEEE Robot. Autom. Lett. 2017, 2, 1680–1687. [Google Scholar] [CrossRef]
- Zhou, B.; Zhang, Y.; Chen, X.; Shen, S. FUEL: Fast UAV Exploration using Incremental Frontier Structure and Hierarchical Planning. IEEE Robot. Autom. Lett. 2021, 6, 779–786. [Google Scholar] [CrossRef]
- Dharmadhikari, M.; Dang, T.; Solanka, L.; Loje, J.; Nguyen, H.; Khedekar, N.; Alexis, K. Motion Primitives-based Path Planning for Fast and Agile Exploration using Aerial Robots. In Proceedings of the 2020 IEEE International Conference on Robotics and Automation (ICRA), Paris, France, 31 May–31 August 2020; pp. 179–185. [Google Scholar] [CrossRef]
- Bircher, A.; Kamel, M.; Alexis, K.; Oleynikova, H.; Siegwart, R. Receding Horizon “Next-Best-View” Planner for 3D Exploration. In Proceedings of the 2016 IEEE International Conference on Robotics and Automation (ICRA), Stockholm, Sweden, 16–21 May 2016; pp. 1462–1468. [Google Scholar] [CrossRef]
- Schmid, L.; Pantic, M.; Khanna, R.; Ott, L.; Siegwart, R.; Nieto, J. An Efficient Sampling-Based Method for Online Informative Path Planning in Unknown Environments. IEEE Robot. Autom. Lett. 2020, 5, 1500–1507. [Google Scholar] [CrossRef]
- Papachristos, C.; Khattak, S.; Alexis, K. Uncertainty-aware receding horizon exploration and mapping using aerial robots. In Proceedings of the 2017 IEEE International Conference on Robotics and Automation (ICRA), Singapore, 29 May–3 June 2017; pp. 4568–4575. [Google Scholar] [CrossRef]
- Xu, Z.; Deng, D.; Shimada, K. Autonomous UAV Exploration of Dynamic Environments Via Incremental Sampling and Probabilistic Roadmap. IEEE Robot. Autom. Lett. 2021, 6, 2729–2736. [Google Scholar] [CrossRef]
- Lin, T.J.; Stol, K.A. Faster Navigation of Semi-Structured Forest Environments using Multi-Rotor UAVs. Robotica 2022. submitted. [Google Scholar]
- Stanford Artificial Intelligence Laboratory. Robotic Operating System. Available online: https://www.ros.org (accessed on 15 June 2022).
- Lin, J.; Zhang, F. R3LIVE: A Robust, Real-Time, RGB-Colored, LiDAR-Inertial-Visual Tightly-Coupled State Estimation and Mapping Package. In Proceedings of the 2022 International Conference on Robotics and Automation (ICRA), Philadelphia, PA, USA, 23–27 May 2022; pp. 10672–10678. [Google Scholar] [CrossRef]
- Zhang, W.; Qi, J.; Peng, W.; Wang, H.; Xie, D.; Wang, X.; Yan, G. An Easy-to-Use Airborne LiDAR Data Filtering Method Based on Cloth Simulation. Remote Sens. 2016, 8, 501. [Google Scholar] [CrossRef]
- Ester, M.; Kriegel, H.P.; Sander, J.; Xu, X. A Density-Based Algorithm for Discovering Clusters in Large Spatial Databases with Noise; AAAI Press: Palo Alto, CA, USA, 1996; pp. 226–231. [Google Scholar]
- Han, L.; Gao, F.; Zhou, B.; Shen, S. FIESTA: Fast Incremental Euclidean Distance Fields for Online Motion Planning of Aerial Robots. In Proceedings of the IEEE International Conference on Intelligent Robots and Systems, Macau, China, 3–8 November 2019; pp. 4423–4430. [Google Scholar] [CrossRef]
- Hart, P.E.; Nilsson, N.J.; Raphael, B. A Formal Basis for the Heuristic Determination of Minimum Cost Paths. IEEE Trans. Syst. Sci. Cybern. 1968, 4, 100–107. [Google Scholar] [CrossRef]
- Agarwal, S.; Mierle, K.; Team, T.C.S. Ceres Solver. Available online: https://github.com/ceres-solver/ceres-solver (accessed on 15 June 2022).
- Lin, T.J.; Stol, K.A. Fast Trajectory Tracking of Multi-Rotor UAVs using First-Order Model Predictive Control. In Proceedings of the 2021 Australian Conference on Robotics and Automation (ACRA), Melbourne, Australia, 6–8 December 2021. [Google Scholar]
- Houska, B.; Ferreau, H.J.; Diehl, M. ACADO toolkit—An open-source framework for automatic control and dynamic optimization. Optim. Control Appl. Methods 2011, 32, 298–312. [Google Scholar] [CrossRef]
- Perlin, K. An Image Synthesizer. In Proceedings of the SIGGRAPH ’85: 12th Annual Conference on Computer Graphics and Interactive Techniques, San Francisco, CA, USA, 22–26 July 1985; Association for Computing Machinery: New York, NY, USA, 1985; pp. 287–296. [Google Scholar] [CrossRef]




















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
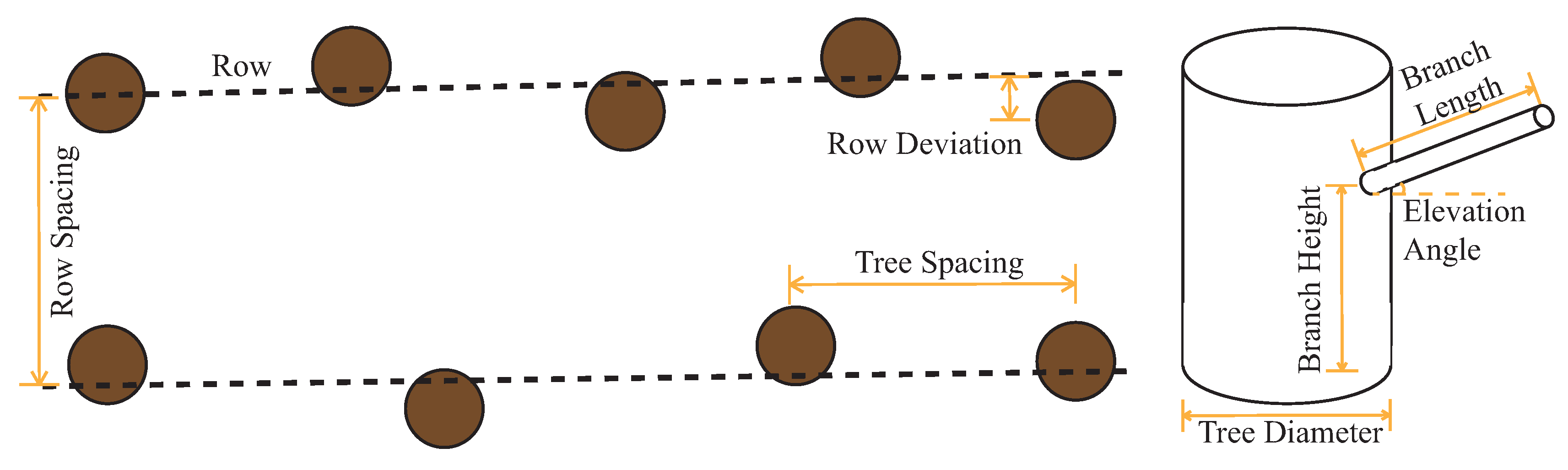
| Parameter | Distribution Type | Mean(m)/a | SD(m)/b |
|---|---|---|---|
| Row spacing (m) | Gaussian | 4.42 | 0.37 |
| Row deviation (m) | Gaussian | 0.01 | 0.78 |
| Tree spacing (m) | Gamma | 2.61 | 2.24 |
| Branch length (Low-branching) (m) | Gamma | 2.94 | 0.37 |
| Branch length (High-branching) (m) | Gamma | 7.31 | 0.37 |
| Branch height (m) | Gaussian | 4.76 | 1.01 |
| Branch Elevation Angle (rad) | Gaussian | 0.23 | 0.62 |
| Tree diameter (m) | Gaussian | 0.52 | 0.14 |
| Label | Branching | Roughness | Slope | Type |
|---|---|---|---|---|
| (a) | 44.1 | 0.074 | 0.120 | High Branching |
| (b) | 38.4 | 3.19 | 0.192 | Mixed Difficult |
| (c) | 6.68 | 1.30 | 0.154 | Mixed Medium |
| (d) | 6.66 | 0.081 | 0.134 | Medium Slope |
| (e) | 6.45 | 1.55 | 0.122 | Medium Roughness |
| (f) | 6.91 | 0.065 | 0.255 | High Slope |
| (g) | 6.57 | 3.57 | 0.103 | High Roughness |
| (h) | 6.48 | 0.079 | 0.076 | Baseline |
| Label | Trails | Incomplete | Mean (s) | SD (s) | Min (s) | Max (s) |
|---|---|---|---|---|---|---|
| (a) | 26 | 4 | 143 | 10.0 | 123 | 163 |
| (b) | 26 | 11 | 147 | 16.9 | 112 | 173 |
| (c) | 28 | 1 | 137 | 5.2 | 121 | 144 |
| (d) | 30 | 0 | 136 | 4.5 | 125 | 141 |
| (e) | 30 | 0 | 139 | 1.5 | 133 | 142 |
| (f) | 28 | 0 | 138 | 2.3 | 133 | 141 |
| (g) | 29 | 0 | 139 | 3.7 | 133 | 144 |
| (h) | 26 | 0 | 134 | 1.7 | 127 | 136 |
| Theoretical Minimum * | - | 0 | 120 | 0 | 120 | - |
| Label | Mean (s) | SD (s) | Min (s) | Max (s) |
|---|---|---|---|---|
| (a) | 2055 | 687 | 1099 | 3453 |
| (b) | 757 | 492 | 139 | 2218 |
| (c) | 1477 | 600 | 532 | 2629 |
| (d) | 1188 | 748 | 137 | 3551 |
| (e) | 1830 | 797 | 707 | 3894 |
| (f) | 1540 | 617 | 631 | 3044 |
| (g) | 1094 | 289 | 435 | 1500 |
| (h) | 1625 | 682 | 699 | 3400 |
| Label | Attempted | Completed | Survey Time (s) | Return Time (s) |
|---|---|---|---|---|
| (a) | 3 | 2 | 114.5 | - |
| (b) | 4 | 3 | 135.5 | 25.5 |
| (c) | 4 | 4 | 106.4 | 18.7 |
| (d) | 5 | 5 | 157.8 | - |
| Label | Attempted | Completed | Survey Time (s) | Return Time (s) |
|---|---|---|---|---|
| (a) | 3 | 3 | 49.8 | 15.3 |
| (b) | 3 | 3 | 66.7 | 20.4 |
| (c) | 3 | 3 | 61.8 | 20.2 |
| (d) | 3 | 3 | 62.9 | 23.1 |
| (e) | 3 | 3 | 52.6 | 20.4 |
| (f) | 3 | 3 | 69.7 | - |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lin, T.-J.; Stol, K.A. Autonomous Surveying of Plantation Forests Using Multi-Rotor UAVs. Drones 2022, 6, 256. https://doi.org/10.3390/drones6090256
Lin T-J, Stol KA. Autonomous Surveying of Plantation Forests Using Multi-Rotor UAVs. Drones. 2022; 6(9):256. https://doi.org/10.3390/drones6090256
Chicago/Turabian StyleLin, Tzu-Jui, and Karl A. Stol. 2022. "Autonomous Surveying of Plantation Forests Using Multi-Rotor UAVs" Drones 6, no. 9: 256. https://doi.org/10.3390/drones6090256
APA StyleLin, T.-J., & Stol, K. A. (2022). Autonomous Surveying of Plantation Forests Using Multi-Rotor UAVs. Drones, 6(9), 256. https://doi.org/10.3390/drones6090256