
Payload Capacities of Remotely Piloted Aerial Application Systems Affect Spray Pattern and Effective Swath


Abstract
1. Introduction
2. Materials and Methods
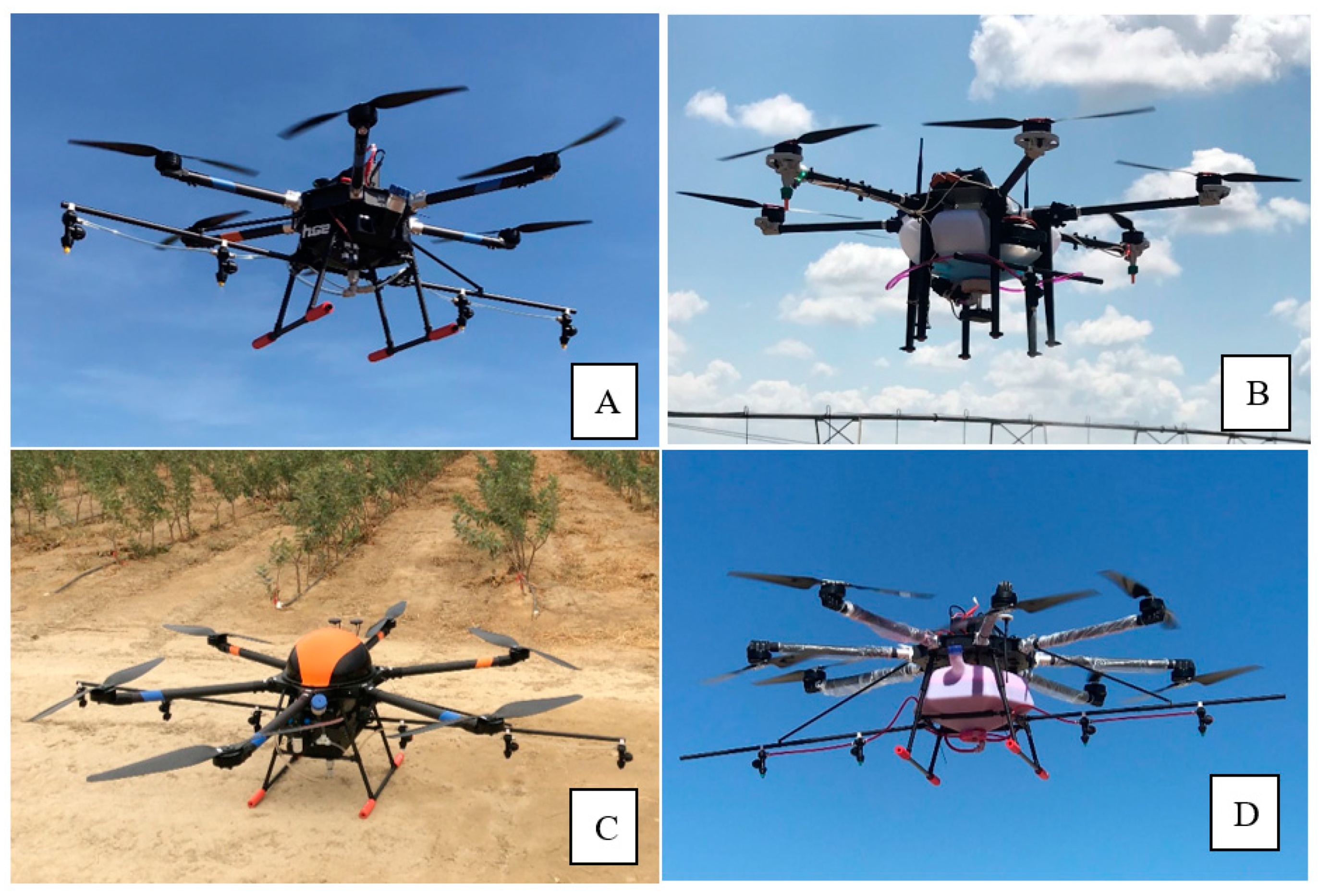
2.1. Descriptions of the RPAAS Models
2.2. Determination of Spray Pattern and Effective Swath
2.3. Spray Droplet Spectra
2.4. Data Analysis
3. Results
3.1. Spray Pattern and Effective Swath
3.2. Theoretical Application Rate
3.3. Spray Droplet Spectra
4. Discussion
4.1. Spray Pattern Uniformity
4.2. Spray Droplet Spectra
4.3. Theoretical Application Rate (TAR)
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Xue, X.; Qin, W.; Sun, Z.; Zhang, S.; Zhou, L.; Wu, P. Effects of N-3 UAV spraying methods on the efficiency of insecticides against planthoppers and Cnaphalocrocis medinalis. Acta Phytophylacica Sin. 2013, 40, 273–278. [Google Scholar]
- Qin, W.; Xue, X.; Zhang, S.; Gu, W.; Wang, B. Droplet deposition and efficiency of fungicides sprayed with small UAV against wheat powdery mildew. Int. J. Agric. Biol. Eng. 2018, 11, 27–32. [Google Scholar] [CrossRef]
- Wang, S.; Song, J.; He, X.; Song, L.; Wang, X.; Wang, C.; Wang, Z.; Ling, Y. Performances evaluation of four typical unmanned aerial vehicles used for pesticide application in China. Int. J. Agric. Biol. Eng. 2017, 10, 22–31. [Google Scholar] [CrossRef]
- Devi, G.; Sowmiya, N.; Yasoda, K.; Muthulakshmi, K.; Balasubramanian, K. Review on application of drones for crop health monitoring and spraying pesticides and fertilizer. J. Crit. Rev 2020, 7, 667–672. [Google Scholar]
- Kestur, R.; Omkar, S.N.; Subhash, S. Unmanned aerial system technologies for pesticide spraying. In Innovative Pest Management Approaches for the 21st Century; Chakravarthy, A.K., Ed.; Springer Nature Singapore Pte Ltd.: Singapore, 2020; pp. 47–60. [Google Scholar]
- Maslekar, N.V.; Kulkarni, K.P.; Chakravarthy, A.K. Application of unmanned aerial vehicles (UAVs) for pest surveillance, monitoring and management. In Innovative Pest Management Approaches for the 21st Century; Chakravarthy, A.K., Ed.; Springer Nature Pte Ltd.: Singapore, 2020; pp. 27–45. [Google Scholar]
- Chakravarthy, A.K. Innovative Pest Management for the 21st Century. Harnessing Automated Unmanned Technologies; Springer Nature Pte Ltd.: Singapore, 2020. [Google Scholar]
- Yallappa, D.; Veerangouda, M.; Maski, D.; Palled, V.; Bheemanna, M. Development and evaluation of drone mounted sprayer for pesticide applications to crops. In Proceedings of the 2017 IEEE Global Humanitarian Technology Conference (GHTC), San Jose, CA, USA, 19–22 October 2017; pp. 1–7. [Google Scholar]
- Shaw, K.K.; Vimalkumar, R. Design and development of a drone for spraying pesticides, fertilizers and disinfectants. Eng. Res. Technol. 2020, 9, 1181–1185. [Google Scholar]
- Giles, D.; Billing, R. Deployment and performance of a UAV for crop spraying. Chem. Eng. Trans. 2015, 44, 307–312. [Google Scholar]
- Giles, D.; Billing, R.; Singh, W. Performance results, economic viability and outlook for remotely piloted aircraft for agricultural spraying. Asp. Appl. Biol. 2016, 132, 15–21. [Google Scholar]
- Martinez-Guanter, J.; Agüera, P.; Agüera, J.; Pérez-Ruiz, M. Spray and economics assessment of a UAV-based ultra-low-volume application in olive and citrus orchards. Precis. Agric. 2019, 21, 226–243. [Google Scholar] [CrossRef]
- Huang, Y.; Hoffman, W.C.; Lan, Y.; Fritz, B.K.; Thomson, S.J. Development of a low-volume sprayer for an unmanned helicopter. J. Agric. Sci. 2015, 7, 148. [Google Scholar] [CrossRef][Green Version]
- Xiongkui, H.; Bonds, J.; Herbst, A.; Langenakens, J. Recent development of unmanned aerial vehicle for plant protection in East Asia. Int. J. Agric. Biol. Eng. 2017, 10, 18–30. [Google Scholar]
- Carey, S.B. Increasing the Endurance and Payload Capacity of Unmanned Aerial Vehicles with Thin-Film Photovoltaics. Master’s Thesis, Naval Postgraduate School, Monterey, CA, USA, 2014. [Google Scholar]
- Mohsan, S.A.H.; Khan, M.A.; Noor, F.; Ullah, I.; Alsharif, M.H. Towards the Unmanned Aerial Vehicles (UAVs): A Comprehensive Review. Drones 2022, 6, 147. [Google Scholar] [CrossRef]
- del Cerro, J.; Cruz Ulloa, C.; Barrientos, A.; de León Rivas, J. Unmanned Aerial Vehicles in Agriculture: A Survey. Agronomy 2021, 11, 203. [Google Scholar] [CrossRef]
- Yang, S.; Yang, X.; Mo, J. The application of unmanned aircraft systems to plant protection in China. Precis. Agric. 2018, 19, 278–292. [Google Scholar] [CrossRef]
- Wu, Y.; Xi, X.; Tang, X.; Luo, D.; Gu, B.; Lam, S.K.; Vitousek, P.M.; Chen, D. Policy distortions, farm size, and the overuse of agricultural chemicals in China. Proc. Natl. Acad. Sci. USA 2018, 115, 7010. [Google Scholar] [CrossRef]
- Lu, B.; Yu, Q.; Fu, X.; Shi, Y.; Cai, M. Parameter matching of hybrid coaxial rotors and multi-rotor UAV’s power system. In Proceedings of the 2016 IEEE International Conference on Aircraft Utility Systems (AUS), Beijing, China, 10–12 October 2016; pp. 1099–1104. [Google Scholar]
- Shi, Y.; Thomasson, J.A.; Murray, S.C.; Pugh, N.A.; Rooney, W.L.; Shafian, S.; Rajan, N.; Rouze, G.; Morgan, C.L.; Neely, H.L. Unmanned aerial vehicles for high-throughput phenotyping and agronomic research. PLoS ONE 2016, 11, e0159781. [Google Scholar] [CrossRef]
- Tang, L.; Shao, G. Drone remote sensing for forestry research and practices. J. For. Res. 2015, 26, 791–797. [Google Scholar] [CrossRef]
- Zhang, C.; Kovacs, J.M. The application of small unmanned aerial systems for precision agriculture: A review. Precis. Agric. 2012, 13, 693–712. [Google Scholar] [CrossRef]
- Martin, D.E.; Woldt, W.E.; Latheef, M.A. Effect of Application Height and Ground Speed on Spray Pattern and Droplet Spectra from Remotely Piloted Aerial Application Systems. Drones 2019, 3, 83. [Google Scholar] [CrossRef]
- Qin, W.; Xue, X.; Zhou, L.; Zhang, S.; Sun, Z.; Kong, W.; Wang, B. Effects of spraying parameters of unmanned aerial vehicle on droplets deposition distribution of maize canopies. Trans. Chin. Soc. Agric. Eng. 2014, 30, 50–56. [Google Scholar]
- Richardson, B.; Rolando, C.A.; Somchit, C.; Dunker, C.; Strand, T.M.; Kimberley, M.O. Swath pattern analysis from a multi-rotor unmanned aerial vehicle configured for pesticide application. Pest Manag. Sci. 2019, 76, 1282–1290. [Google Scholar] [CrossRef]
- Teske, M.; Thistle, H.; Ice, G. Technical advances in modeling aerially applied sprays. Trans. ASAE 2003, 46, 985. [Google Scholar] [CrossRef]
- Gardisser, D.R. Operation S.A.F.E. For quality performance/web-based decision making. 2010. [Google Scholar]
- Grift, T.; Walker, J.; Gardisser, D. Spread pattern analysis tool (SPAT): II. Examples of aircraft pattern analysis. Trans. ASAE 2000, 43, 1351. [Google Scholar] [CrossRef][Green Version]
- Carpenter, T.G.; Reichard, D.L.; Khan, A.S. Spray Deposition from a Row-Crop Airblast Sprayer. Trans. ASAE 1983, 26, 338. [Google Scholar] [CrossRef]
- Whitney, R.W.; Kuhlman, D.K. Pattern analysis of agricultural aircraft. SAE Trans. 1983, 92, 169–177. [Google Scholar]
- Yates, W.E. Spray pattern analysis and evaluation of deposits from agricultural aircraft. Trans. ASAE 1962, 5, 49–53. [Google Scholar] [CrossRef]
- Whittney, R.W.; Gardisser, D.R. DropletScan Operators Manual; WRK of Oklahoma and Arkansas: Fort Smith, AR, USA, 2003. [Google Scholar]
- SAS. SAS Version 9.4; SAS Institute Inc.: Cary, NC, USA, 2012. [Google Scholar]
- Saxton, A. User’s Guide for Design and Analysis: SAS Macro Collection DandA.Sas.; University of Tennessee: Knoxville, TN, USA, 2012. [Google Scholar]
- SAS. JMP® 14; SAS Institute Inc.: Cary, NC, USA, 2018. [Google Scholar]
- Smith, D.B.; Oakley, D.; Williams, E.; Kirkpatrick, A. Broadcast spray deposits from fan nozzles. Appl. Eng. Agric. 2000, 16, 109–113. [Google Scholar] [CrossRef]
- Qin, W.-C.; Qiu, B.-J.; Xue, X.-Y.; Chen, C.; Xu, Z.-F.; Zhou, Q.-Q. Droplet deposition and control effect of insecticides sprayed with an unmanned aerial vehicle against plant hoppers. Crop Prot. 2016, 85, 79–88. [Google Scholar] [CrossRef]
- Xue, X.; Lan, Y.; Sun, Z.; Chang, C.; Hoffmann, W.C. Develop an unmanned aerial vehicle based automatic aerial spraying system. Comput. Electron. Agric. 2016, 128, 58–66. [Google Scholar] [CrossRef]
- Zheng, Y.; Yang, S.; Zhao, C.; Chen, L.; Lan, Y.; Tan, Y. Modelling operation parameters of UAV on spray effects at different growth stages of corns. Int. J. Agric. Biol. Eng. 2017, 10, 57–66. [Google Scholar]
- Marinello, F.; Pezzuolo, A.; Chiumenti, A.; Sartori, L. Technical analysis of unmanned aerial vehicles (drones) for agricultural applications. In Proceedings of the Engineering for Rural Development, Jelgava, Latvia, 25–27 May 2022; pp. 870–875. [Google Scholar]
- Zhang, P.; Deng, L.; Lyu, Q.; He, S.L.; Yi, S.L.; Liu, Y.D.; Yu, Y.X.; Pan, H.Y. Effects of citrus tree-shape and spraying height of small unmanned aerial vehicle on droplet distribution. Int. J. Agric. Biol. Eng. 2016, 9, 45–52. [Google Scholar]
- Tang, Q.; Zhang, R.R.; Chen, L.P.; Xu, M.; Yi, T.C.; Zhang, B. Droplets movement and deposition of an eight-rotor agricultural UAV in downwash flow field. Int. J. Agric. Biol. Eng. 2017, 10, 47–56. [Google Scholar]
- Yang, Z.; Qi, L.; Wu, Y. Influence of UAV Rotor Down-wash Airflow For Droplet Penetration. In Proceedings of the 2018 ASABE Annual International Meeting, Detroit, MI, USA, 29 July–1 August 2018; p. 1. [Google Scholar]
- Yang, S.; Liu, X.; Chen, B.; Li, S.; Zheng, Y. CFD Models and Verification of the Downwash Airflow of an Eight-rotor UAV. In Proceedings of the 2019 ASABE Annual International Meeting, St. Joseph, MI, USA, 7–10 July 2019; p. 1. [Google Scholar]
- Zhang, S.C.; Xue, X.Y.; Sun, Z.; Zhou, L.X.; Jin, Y.K. Downwash distribution of single-rotor unmanned agricultural helicopter on hovering state. Int. J. Agric. Biol. Eng. 2017, 10, 14–24. [Google Scholar] [CrossRef]
- Lou, Z.; Xin, F.; Han, X.; Lan, Y.; Duan, T.; Fu, W. Effect of Unmanned Aerial Vehicle Flight Height on Droplet Distribution, Drift and Control of Cotton Aphids and Spider Mites. Agronomy 2018, 8, 187. [Google Scholar] [CrossRef]
- Lv, M.; Xiao, S.; Yu, T.; He, Y. Influence of UAV flight speed on droplet deposition characteristics with the application of infrared thermal imaging. Int. J. Agric. Biol. Eng. 2019, 12, 10–17. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Aircraft Model * | Payload Capacity (L) | Number of Rotors/Motors | KV | Maximum Thrust | Maximum Power | Nozzle Orifice | Number of Nozzles | Pressure (kPa) | Nozzle Flow Rate |
|---|---|---|---|---|---|---|---|---|---|
| (RPMs/V) | (kg) | (W) | (mL/min) | ||||||
| V6A | 5 | 6 | 180 | 9 | 2000 | 80-005 | 4 | 496 | 250 |
| M6E-1 | 10 | 6 | 180 | 9 | 2000 | 110-02 | 2 | 262 | 754 |
| V6A Pro | 15 | 6 | 120 | 14 | 2300 | 80-0067 | 6 | 367 | 367 |
| V8A Pro | 20 | 8 | 120 | 14 | 2300 | 80-0067 | 6 | 367 | 367 |
| Meteorological Data | 2018 | 2019 | ||||
|---|---|---|---|---|---|---|
| Dates | 9 May | 25 October | 19 March | 20 March | ||
| RPAASs | V6A | V6A Pro V8A Pro | M6E-1 | V8A Pro | M6E-1 | V8A Pro |
| Wind Speed (m/s) | 4.6 ± 0.20 | 7.3 ± 0.26 | 4.8 ± 0.24 | 6.0 ± 0.84 | 1.96 ± 0.14 | 2.1 ± 0.17 |
| Wind Direction (°) | 190.1 ± 1.96 | 318 ± 2.39 | 137.8 ± 3.72 | 141.5 ± 3.10 | 242.0 ± 12.9 | 234.7 ± 10.12 |
| Temperature (°C) | 25.4 ± 0.45 | 18.2 ± 0.08 | 21.1 ± 0.13 | 21.3 ± 0.35 | 22.2 ±0.57 | 20.7 ±0.32 |
| Relative Humidity (%) | 67.3 ± 2.74 | 72.1 ± 0.66 | 34.6 ± 0.50 | 33.0 ± 0.80 | 44.7 ± 1.91 | 49.1 ± 1.35 |
| Source of Variation | F | p | df |
|---|---|---|---|
| Platform | 25.81 | 0.0001 | 3 |
| Application Height | 0.26 | 0.77 | 2 |
| Ground Speed | 2.95 | 0.03 | 3 |
| Height × Speed | 0.93 | 0.48 | 6 |
| Platform × Height | 2.02 | 0.07 | 6 |
| Platform × Speed | 1.80 | 0.07 | 9 |
| Error df | 159 |
| Application Height (m) | Effective Swath (m) by Platform | |||
|---|---|---|---|---|
| V6A | M6E-1 | V6A Pro | V8A Pro | |
| 2 | 4.74a | 5.14b | 8.15a | 7.00a |
| 3 | 3.89a | 6.71a | 8.31a | 7.30a |
| 4 | 3.66a | 6.78a | 7.10a | 8.30a |
| F-value | 1.74 | 4.73 | 1.07 | 1.08 |
| p | 0.19 | 0.01 | 0.35 | 0.35 |
| df | 2, 35 | 2, 36 | 2, 36 | 2, 34 |
| Ground Speed (m·s−1) | V6A | TAR | M6E-1 | TAR | V6A Pro | TAR | V8A Pro | TAR |
|---|---|---|---|---|---|---|---|---|
| (L·ha−1) | (L·ha−1) | (L·ha−1) | (L·ha−1) | |||||
| 1 | 4.11a | 40.63 | 7.57a | 36.53 | 8.60a | 18.99 | 6.60a | 24.75 |
| 3 | 3.56a | 15.64 | 6.25ab | 14.75 | 8.38a | 6.50 | 8.81a | 6.18 |
| 5 | 4.11a | 8.13 | 4.50b | 12.29 | 7.26a | 4.50 | 6.54a | 5.00 |
| 7 | 4.60a | 5.19 | 6.53a | 6.05 | 7.16a | 3.26 | 8.28a | 2.82 |
| F-value | 0.74 | 6.76 | 0.99 | 2.32 | ||||
| p | 0.54 | 0.001 | 0.41 | 0.09 | ||||
| df | 3, 35 | 3, 36 | 3, 36 | 3, 34 |
| Source of Variation | Sum of Squares | F | p | df |
|---|---|---|---|---|
| Dv0.1 | ||||
| Rep | 2997.9 | 0.68 | 0.56 | 3 |
| Platform | 269,566.8 | 61.18 | <0.0001 | 3 |
| Rep × Platform | 11,473.4 | 0.87 | 0.55 | 9 |
| Dv0.5 | ||||
| Rep | 2785.3 | 0.31 | 0.82 | 3 |
| Platform | 717,324.3 | 79.67 | <0.0001 | 3 |
| Rep × Platform | 17,439.6 | 0.64 | 0.76 | 9 |
| Dv0.9 | ||||
| Rep | 12,767.2 | 0.83 | 0.48 | 3 |
| Platform | 1,295,932 | 84.2 | <0.0001 | 3 |
| Rep × Platform | 89,385.9 | 1.94 | 0.04 | 9 |
| * MSE | 849 | |||
| Source of Variation | df | Sum of Squares | F Ratio | Prob > F |
|---|---|---|---|---|
| Dv0.1 (µm) | ||||
| Platform | 3 | 145,312.7 | 37.813 | <0.0001 |
| Application Height (m) | 2 | 15,219.73 | 5.9407 | 0.0027 |
| Ground Speed (m/s) | 3 | 18,531.9 | 4.8223 | 0.0025 |
| Height × Speed | 6 | 16,989.91 | 2.2105 | 0.0401 |
| Platform × Height | 6 | 111,157.4 | 14.4626 | <0.0001 |
| Platform × Speed | 9 | 17,383.99 | 1.5079 | 0.1405 |
| MSE | 835 | |||
| Dv0.5 (µm) | ||||
| Platform | 3 | 498 944.1 | 66.6 | <0.0001 |
| Application Height (m) | 2 | 24,949.7 | 5 | 0.007 |
| Ground Speed (m/s) | 3 | 71,753.7 | 9.58 | <0.0001 |
| Height × Speed | 6 | 14,516.1 | 0.97 | 0.4452 |
| Platform × Height | 6 | 190,017.8 | 12.68 | <0.0001 |
| Platform × Speed | 9 | 69,168.9 | 3.08 | 0.0012 |
| MSE | 835 | |||
| Dv0.9 (µm) | ||||
| Platform | 3 | 920,246 | 79.6125 | <0.0001 |
| Application Height (m) | 2 | 42,571.14 | 5.5244 | 0.0041 |
| Ground Speed (m/s) | 3 | 318,703 | 27.5717 | <0.0001 |
| Height × Speed | 6 | 35,850.46 | 1.5508 | 0.1587 |
| Platform × Height | 6 | 179,659.5 | 7.7714 | <0.0001 |
| Platform × Speed | 9 | 196,372.8 | 5.6629 | <0.0001 |
| * MSE | 835 | |||
| Ground Speed (m·s−1) | |||||
|---|---|---|---|---|---|
| Application Height (m) | 1 | 3 | 5 | 7 | ANOVA Statistics |
| Dv0.1 | |||||
| 2 | 130a | 124abc | 124abc | 122abc | Height: F = 11.76; p < 0.0001 |
| 3 | 113abc | 104c | 108bc | 110abc | Speed: F = 1.49; p > 0.22 |
| 4 | 107bc | 134ab | 117abc | 103c | Height × Speed: F = 2.79; p > 0.01 |
| Dv0.5 | |||||
| 2 | 225a | 207ab | 197abc | 195abcd | Height: F = 28.51; p < 0.0001 |
| 3 | 191bcde | 172cde | 166de | 165de | Speed: F = 6.58; p > 0.0003 |
| 4 | 170cde | 197abcde | 172cde | 164e | Height × Speed: F = 2.04; p > 0.06 |
| Dv0.9 | |||||
| 2 | 330a | 296ab | 266bcd | 281bc | Height: F = 24.60; p < 0.0001 |
| 3 | 287ab | 251bcde | 239cde | 228de | Speed: F = 17.05; p < 0.0001 |
| 4 | 260bcde | 278abcd | 233cde | 220e | Height × Speed: F = 1.60; p > 0.15 |
| % Coverage | |||||
| 2 | 4.36a | 1.94b | 1.67b | 0.54b | Height: F = 7.33; p > 0.0009 |
| 3 | 4.71a | 1.64b | 0.75b | 0.41b | Speed: F = 31.73; p < 0.0001 |
| 4 | 2.05b | 0.63b | 0.52b | 0.36b | Height × Speed: F = 2.15; p > 0.05 |
| Spray Application Rate (L·ha−1) | |||||
| 2 | 14.88a | 6.40b | 5.34b | 1.70b | Height: F = 7.61; p > 0.0007 |
| 3 | 14.93a | 4.69b | 2.15b | 1.19b | Speed: F = 30.41; p < 0.0001 |
| 4 | 6.36b | 2.01b | 1.48b | 1.0b | Height x Speed: F = 2.07; p > 0.06 |
| Ground Speed (m·s−1) | |||||
|---|---|---|---|---|---|
| Application Height (m) | 1 | 3 | 5 | 7 | ANOVA Statistics |
| Dv0.1 | |||||
| 2 | 188abc | 164bc | 182abc | 163c | Height: F = 15.88; p < 0.0001; df = 2, 196 |
| 3 | 245a | 201abc | 229ab | 244a | Speed: F = 0.79; p > 0.50; df = 3, 196 |
| 4 | 186abc | 197abc | 183abc | 181abc | Height × Speed: F = 0.94; p > 0.47; df = 6, 196 |
| Dv0.5 | |||||
| 2 | 339ab | 288b | 300ab | 285b | Height: F = 17.44; p < 0.0001 |
| 3 | 380a | 246ab | 371a | 338ab | Speed: F = 4.50; p > 0.0044 |
| 4 | 324ab | 298ab | 268b | 276b | Height × Speed: F = 0.55; p > 0.77 |
| Dv0.9 | |||||
| 2 | 480ab | 397bcd | 403bcd | 352d | Height: F = 8.71; p > 0.0002 |
| 3 | 515a | 444abcd | 464abc | 419abcd | Speed: F = 16.49; p < 0.0001 |
| 4 | 487ab | 406abcd | 359d | 381cd | Height × Speed: F = 0.90; p > 0.50 |
| % Coverage | |||||
| 2 | 3.35a | 0.65c | 0.59c | 0.28c | Height: F = 0.36; p > 0.70 |
| 3 | 2.94a | 1.02bc | 0.77c | 0.41c | Speed: F = 47.23; p < 0.0001 |
| 4 | 2.30ab | 0.98bc | 0.68c | 0.48c | Height × Speed: F = 1.32; p > 0.25 |
| Spray Application Rate (L·ha−1) | |||||
| 2 | 12.78a | 2.40c | 2.24c | 1.04c | Height: F = 0.50; p > 0.60 |
| 3 | 11.39a | 3.94bc | 3.01c | 1.58c | Speed: F = 47.98; p < 0.0001 |
| 4 | 8.80ab | 3.62bc | 2.46c | 1.83c | Height × Speed: F = 1.28; p > 0.2 |
| Ground Speed (m·s−1) | |||||
|---|---|---|---|---|---|
| Application Height (m) | 1 | 3 | 5 | 7 | ANOVA Statistics |
| Dv0.1 | |||||
| 2 | 117ab | 91b | 109ab | 89b | Height: F = 0.24; p > 0.78; df |
| 3 | 128a | 94b | 100ab | 97b | Speed: F = 10.31; p < 0.0001 |
| 4 | 113ab | 92b | 104ab | 107ab | Height × Speed: F = 1.28; p > 0.27 |
| Dv0.5 | |||||
| 2 | 209ab | 162b | 175ab | 167ab | Height: F = 0.12; p > 0.89 |
| 3 | 227a | 149b | 159b | 161b | Speed: F = 12.69; p < 0.0001 |
| 4 | 210ab | 149b | 153b | 188ab | Height × Speed: F = 0.87; p > 0.51 |
| Dv0.9 | |||||
| 2 | 324a | 233bc | 234bc | 210c | Height: 1.73; p > 0.18 |
| 3 | 340a | 207c | 208c | 219bc | Speed: 29.99; p < 0.0001 |
| 4 | 285ab | 207c | 190c | 235bc | Height × Speed: 1.58: p > 0.15 |
| % Coverage | |||||
| 2 | 6.78a | 1.07b | 0.88b | 0.15b | Height: F = 9.39; p > 0.0001 |
| 3 | 6.37a | 0.22b | 0.38b | 0.20b | Speed: F = 57.56; p < 0.0001 |
| 4 | 2.07b | 0.15b | 0.16b | 0.13b | Height × Speed: F = 5.18; p < 0.0001 |
| Spray Application Rate (L·ha−1) | |||||
| 2 | 22.93a | 2.91b | 2.57b | 0.41b | Height: F = 8.26; p > 0.0003 |
| 3 | 21.79a | 0.56b | 1.05b | 0.56b | Speed: F = 50.17; p < 0.0001 |
| 4 | 6.21b | 0.40b | 0.44b | 0.37b | Height × Speed: F = 5.15; p < 0.0001 |
| Ground Speed (m·s−1) | |||||
|---|---|---|---|---|---|
| Application Height (m) | 1 | 3 | 5 | 7 | ANOVA Statistics |
| Dv0.1 | |||||
| 2 | 104a | 92ab | 94ab | 89ab | Height: F = 0.20; p > 0.82 |
| 3 | 99ab | 96ab | 95ab | 96ab | Speed: F = 3.01; p > 0.03 |
| 4 | 97ab | 100ab | 85b | 96ab | Height × Speed: F = 1.62; p > 0.14 |
| Dv0.5 | |||||
| 2 | 183a | 161abcde | 153bcde | 147de | Height: F = 0.58; p > 0.56 |
| 3 | 178ab | 172abcd | 151cde | 159abcde | Speed: F = 16.96; p < 0.0001 |
| 4 | 174abc | 175abc | 144e | 153bcde | Height × Speed: F = 1.20; p > 0.31 |
| Dv0.9 | |||||
| 2 | 269a | 236abcd | 228bcd | 211d | Height: F = 0.13; p > 0.88 |
| 3 | 259ab | 254abc | 216d | 218bcd | Speed: F = 20.96; p < 0.0001 |
| 4 | 254abc | 254abc | 212d | 215cd | Height × Speed: F = 1.27; p > 0.27 |
| % Coverage | |||||
| 2 | 4.25a | 2.01ab | 0.75b | 0.47b | Height: F = 0.12; p > 0.89 |
| 3 | 3.41a | 2.34ab | 0.74b | 0.27b | Speed: F = 23.57; p < 0.0001 |
| 4 | 3.78a | 2.80ab | 0.56b | 0.31b | Height × Speed: F = 0.35; p > 0.91 |
| Spray Application Rate (L·ha−1) | |||||
| 2 | 13.76a | 5.70abc | 2.01c | 1.27c | Height: F = 0.10; p > 0.90 |
| 3 | 10.61ab | 7.01abc | 2.03c | 0.74bc | Speed: F = 21.86; p < 0.0001 |
| 4 | 11.64a | 8.33abc | 1.43c | 0.83c | Height × Speed: F = 0.41; p > 0.87 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Martin, D.E.; Latheef, M.A. Payload Capacities of Remotely Piloted Aerial Application Systems Affect Spray Pattern and Effective Swath. Drones 2022, 6, 205. https://doi.org/10.3390/drones6080205
Martin DE, Latheef MA. Payload Capacities of Remotely Piloted Aerial Application Systems Affect Spray Pattern and Effective Swath. Drones. 2022; 6(8):205. https://doi.org/10.3390/drones6080205
Chicago/Turabian StyleMartin, Daniel E., and Mohamed A. Latheef. 2022. "Payload Capacities of Remotely Piloted Aerial Application Systems Affect Spray Pattern and Effective Swath" Drones 6, no. 8: 205. https://doi.org/10.3390/drones6080205
APA StyleMartin, D. E., & Latheef, M. A. (2022). Payload Capacities of Remotely Piloted Aerial Application Systems Affect Spray Pattern and Effective Swath. Drones, 6(8), 205. https://doi.org/10.3390/drones6080205