
A Novel UAV Visual Positioning Algorithm Based on A-YOLOX


Abstract
1. Introduction
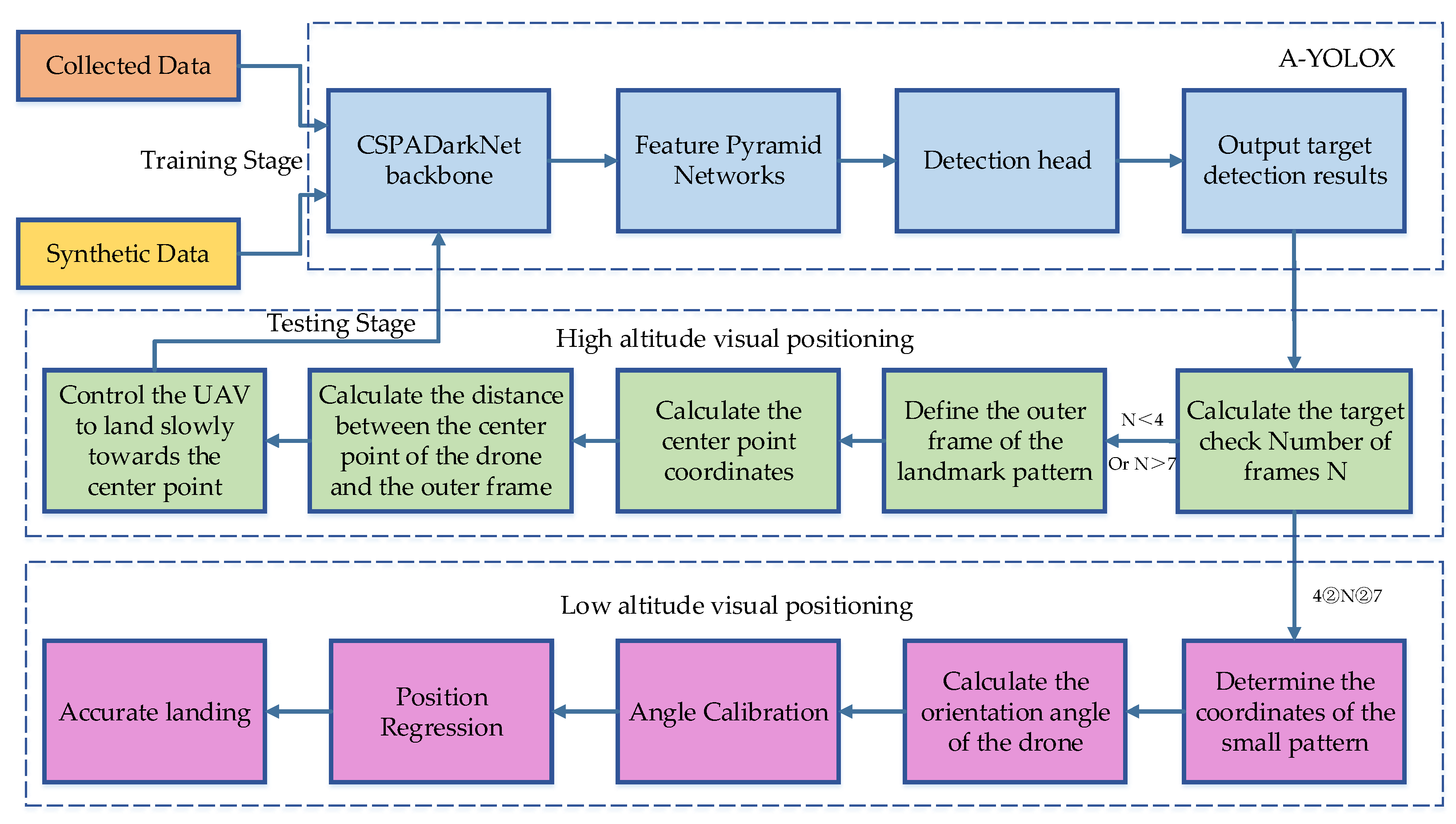
- During the process of UAV landing, when moving from high to low altitudes, the visual imaging constantly changes, and the pixel area of the target pattern gradually increases, which poses a great challenge for target detection. Therefore, we developed high- and low-altitude visual positioning algorithms to achieve stable detection with UAVs throughout the process of moving from high to low altitudes;
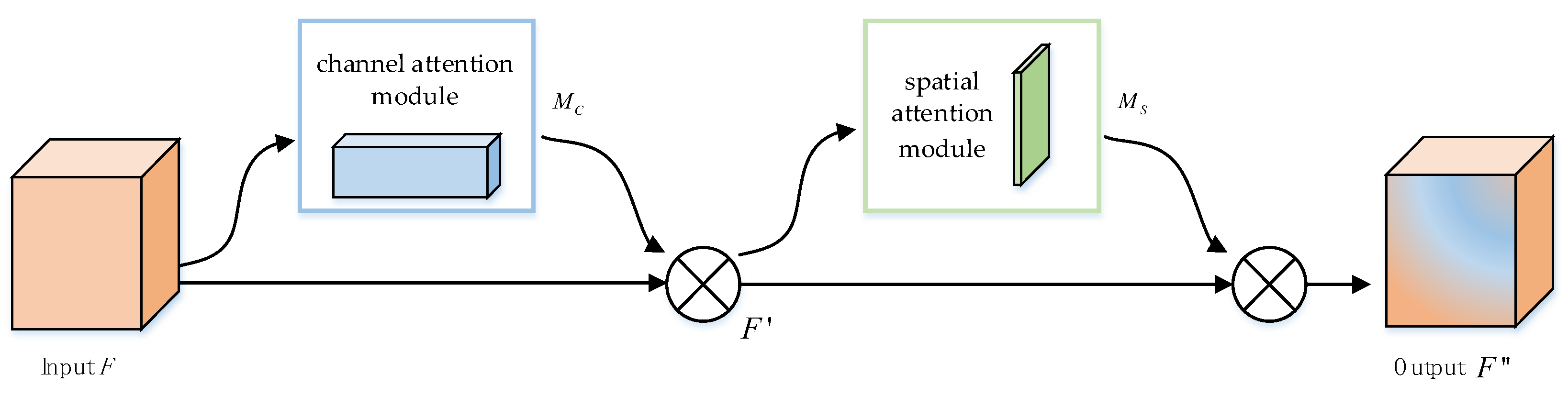
- To solve the problem of poor detection of small- and medium-sized targets with the model, we supplemented the YOLOX algorithm [22] with an attention mechanism and proposed the attention-based YOLOX (A-YOLOX) detection algorithm, which improves the detection performance of the model for small- and medium-sized targets;
- We collected 6541 actual images under different conditions and expanded the data with data synthesis techniques in order to compile the UAV Visual Positioning Database (UAV-VPD), a database applicable for UAV landing scenarios;
- Extensive experiments were carried out with the newly created database and in the real environment, and our model proved to be robust. Our model achieved an actual landing accuracy within 5 cm, and the FPS reached 53.7, which meets the requirements of real-time detection.
2. Related Work
3. Methods
3.1. The Construction of UAV-VPD
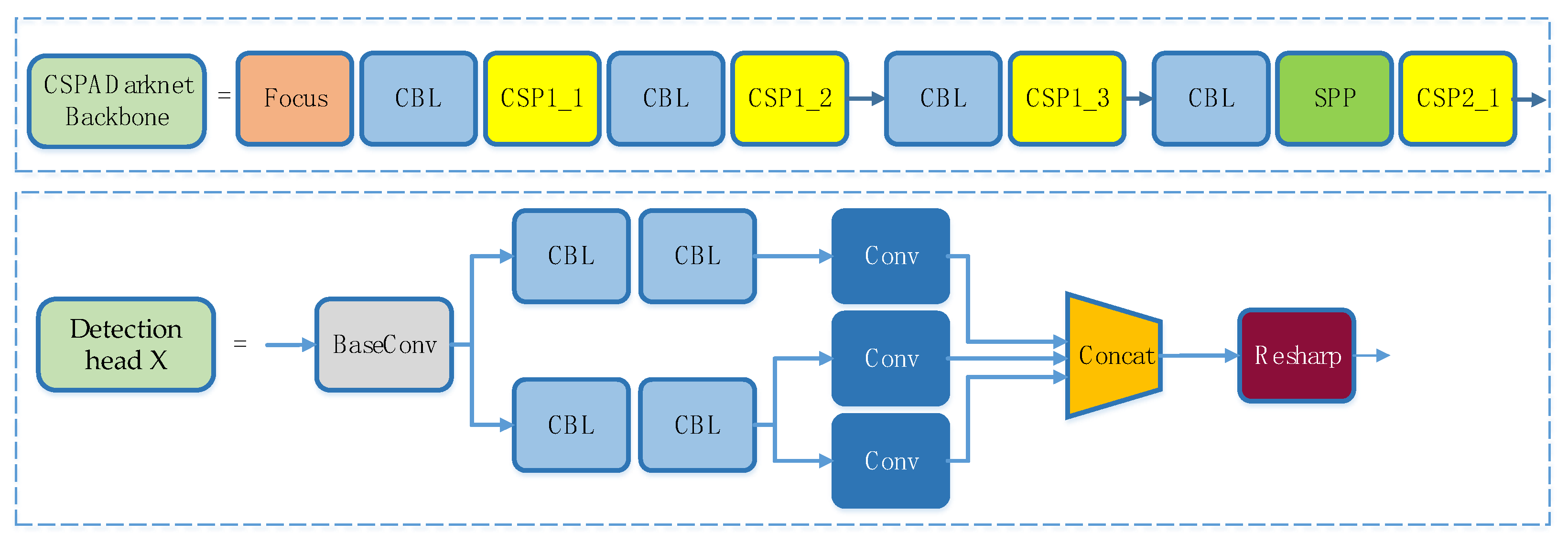
3.2. Object Detection Algorithm A-YOLOX
3.3. The Design of High- and Low-Altitude Visual Positioning Algorithm
3.3.1. High-Altitude Visual Positioning Algorithm
| Algorithm 1. High-Altitude Visual Positioning Algorithm. | |
| Step 1 | Call the target detection algorithm for the first detection when UVAs return over the landing site to obtain the position of center point of the camera carried by UAVs as . |
| Step 2 | a. Take the detected target as the target landing point when only one outer frame of the visual positioning pattern is detected. b. Calculate the confidence degree of each detected target when two or more outer frames of the visual positioning pattern are detected, and score the target frame with the higher confidence level by the equation S = 0.5 × A + P, thus the target frame with the highest score being the landing point. |
| Step 3 | Calculate the relative distance between the center point of the camera and the center point of the visual positioning pattern by equations dx = xc − width/2, and dy = yc − heigth/2. |
| Step 4 | Calculate the control quantity according to to lead UAVs closer to the target position. |
| Step 5 | Repeat steps 2 to 4. |
3.3.2. Low-Altitude Visual Positioning Algorithm
4. Results and Discussion
4.1. Experiment to Verify the Validity of Synthetic Data
4.2. Experiments on Attention Mechanism
4.3. Performance Comparison Experiments of Target Detection Algorithm
4.4. Drone Actual Landing Experiment
5. Conclusions and Future Work
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Ming, Z.; Huang, H. A 3d vision cone based method for collision free navigation of a quadcopter UAV among moving obstacles. Drones 2021, 5, 134. [Google Scholar] [CrossRef]
- Giuseppi, A.; Germanà, R.; Fiorini, F. UAV Patrolling for Wildfire Monitoring by a Dynamic Voronoi Tessellation on Satellite Data. Drones 2021, 5, 130. [Google Scholar] [CrossRef]
- Ausonio, E.; Bagnerini, P.; Ghio, M. Drone swarms in fire suppression activities: A conceptual framework. Drones 2021, 5, 17. [Google Scholar] [CrossRef]
- Akhloufi, M.A.; Couturier, A.; Castro, N.A. Unmanned aerial vehicles for wildland fires: Sensing, perception, cooperation and assistance. Drones 2021, 5, 15. [Google Scholar] [CrossRef]
- Aydin, B.; Selvi, E.; Tao, J. Use of fire-extinguishing balls for a conceptual system of drone-assisted wildfire fighting. Drones 2019, 3, 17. [Google Scholar] [CrossRef]
- Zhang, J.; Huang, H. Occlusion-aware UAV path planning for reconnaissance and surveillance. Drones 2021, 5, 98. [Google Scholar] [CrossRef]
- Khan, A.; Rinner, B.; Cavallaro, A. Cooperative Robots to Observe Moving Targets: Review. IEEE Trans. Cybern. 2018, 48, 187–198. [Google Scholar] [CrossRef]
- Fan, J.; Yang, X.; Lu, R. Design and implementation of intelligent inspection and alarm flight system for epidemic prevention. Drones 2021, 5, 68. [Google Scholar] [CrossRef]
- Alsamhi, S.H.; Shvetsov, A.V.; Kumar, S. UAV computing-assisted search and rescue mission framework for disaster and harsh environment mitigation. Drones 2022, 6, 154. [Google Scholar] [CrossRef]
- Ding, J.; Zhang, J.; Zhan, Z. A Precision Efficient Method for Collapsed Building Detection in Post-Earthquake UAV Images Based on the Improved NMS Algorithm and Faster R-CNN. Remote Sens. 2022, 14, 663. [Google Scholar] [CrossRef]
- Jumaah, H.J.; Kalantar, B.; Halin, A.A. Development of UAV-based PM2. 5 monitoring system. Drones 2021, 5, 60. [Google Scholar] [CrossRef]
- Krul, S.; Pantos, C.; Frangulea, M. Visual SLAM for indoor livestock and farming using a small drone with a monocular camera: A feasibility study. Drones 2021, 5, 41. [Google Scholar] [CrossRef]
- Zhao, W.; Dong, Q.; Zuo, Z. A Method Combining Line Detection and Semantic Segmentation for Power Line Extraction from Unmanned Aerial Vehicle Images. Remote Sens. 2022, 14, 1367. [Google Scholar] [CrossRef]
- Ben, M.B. Power Line Charging Mechanism for Drones. Drones 2021, 5, 108. [Google Scholar] [CrossRef]
- Aslan, M.F.; Durdu, A.; Sabanci, K. A comprehensive survey of the recent studies with UAV for precision agriculture in open fields and greenhouses. Appl. Sci. 2022, 12, 1047. [Google Scholar] [CrossRef]
- Kim, J.; Kim, S.; Ju, C. Unmanned aerial vehicles in agriculture: A review of perspective of platform, control, and applications. IEEE Access 2019, 7, 105100–105115. [Google Scholar] [CrossRef]
- Bassolillo, S.R.; D’Amato, E.; Notaro, I. Enhanced Attitude and Altitude Estimation for Indoor Autonomous UAVs. Drones 2022, 6, 18. [Google Scholar] [CrossRef]
- Xin, L.; Tang, Z.; Gai, W. Vision-Based Autonomous Landing for the UAV: A Review. Aerospace 2022, 9, 634. [Google Scholar] [CrossRef]
- Sharp, C.S.; Shakernia, O.; Sastry, S.S. A vision system for landing an unmanned aerial vehicle. In Proceedings of the 2001 IEEE International Conference on Robotics and Automation, (ICRA), Seoul, Korea, 21–26 May 2001. [Google Scholar] [CrossRef]
- Marut, A.; Wojtowicz, K.; Falkowski, K. ArUco markers pose estimation in UAV landing aid system. In Proceedings of the 2019 IEEE 5th International Workshop on Metrology for AeroSpace (MetroAeroSpace), Torino, Italy, 19–21 June 2019. [Google Scholar] [CrossRef]
- Yuan, H.; Xiao, C.; Xiu, S. A hierarchical vision-based UAV localization for an open landing. Electronics 2018, 7, 68. [Google Scholar] [CrossRef]
- Ge, Z.; Liu, S.; Wang, F. Yolox: Exceeding yolo series in 2021. arXiv 2021, arXiv:2107.08430. [Google Scholar]
- Li, Z.; Chen, Y.; Lu, H. UAV autonomous landing technology based on AprilTags vision positioning algorithm. In Proceedings of the 2019 Chinese Control Conference (CCC), Guangzhou, China, 27–30 July 2019. [Google Scholar] [CrossRef]
- Al-Radaideh, A.; Sun, L. Self-Localization of Tethered Drones without a Cable Force Sensor in GPS-Denied Environments. Drones 2021, 5, 135. [Google Scholar] [CrossRef]
- Kwak, J.; Sung, Y. Autonomous UAV flight control for GPS-based navigation. IEEE Access 2018, 6, 37947–37955. [Google Scholar] [CrossRef]
- Abdelkrim, N.; Aouf, N.; Tsourdos, A. Robust nonlinear filtering for INS/GPS UAV localization. In Proceedings of the 2008 16th Mediterranean Conference on Control and Automation, Ajaccio, France, 25–27 June 2008. [Google Scholar] [CrossRef]
- Vanegas, F.; Gaston, K.J.; Roberts, J. A framework for UAV navigation and exploration in GPS-denied environments. In Proceedings of the 2019 IEEE Aerospace Conference, Big Sky, MT, USA, 2–9 March 2019. [Google Scholar] [CrossRef]
- Wubben, J.; Fabra, F.; Calafate, C.T. Accurate landing of unmanned aerial vehicles using ground pattern recognition. Electronics 2019, 8, 1532. [Google Scholar] [CrossRef]
- Lange, S.; Sunderhauf, N.; Protzel, P. A vision based on board approach for landing and position control of an autonomous multirotor UAV in GPS-denied environments. In Proceedings of the 14th International Conference on Advanced Robotics (ICAR), Munich, Germany, 22–26 June 2009. [Google Scholar]
- Xiu, S.; Wen, Y.; Xiao, C. Design and Simulation on Autonomous Landing of a Quad Tilt Rotor. Syst. Simul. 2020, 32, 1676. [Google Scholar] [CrossRef]
- Sefidgar, M.; Landry, J.R. Unstable landing platform pose estimation based on Camera and Range Sensor Homogeneous Fusion (CRHF). Drones 2022, 6, 60. [Google Scholar] [CrossRef]
- Zhao, Z.Q.; Zheng, P.; Xu, S. Object detection with deep learning: A review. IEEE Trans. Neural Netw. Learn. Syst. 2019, 30, 3212–3232. [Google Scholar] [CrossRef]
- Xiao, Y.; Tian, Z.; Yu, J. A review of object detection based on deep learning. Multimed. Tools Appl. 2020, 79, 23729–23791. [Google Scholar] [CrossRef]
- Girshick, R.; Donahue, J.; Darrell, T. Rich Feature Hierarchies for Accurate Object Detection and Semantic Segmentation. In Proceedings of the 2014 IEEE Computer Society Conference on Computer Vision and Pattern Recognition (CVPR), Columbus, OH, USA, 23–28 June 2014. [Google Scholar]
- He, K.; Zhang, X.; Ren, S. Spatial pyramid pooling in deep convolutional networks for visual recognition. IEEE Trans. Pattern Anal. Mach. Intell. 2015, 37, 1904–1916. [Google Scholar] [CrossRef]
- Ren, S.; He, K.; Girshick, R. Faster R-CNN: Towards Real-Time Object Detection with Region Proposal Networks. IEEE Trans. Pattern Anal. Mach. Intell. 2017, 39, 1137–1149. [Google Scholar] [CrossRef]
- Fan, Q.; Zhuo, W.; Tang, C.K. Few-shot object detection with attention-RPN and multi-relation detector. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Seattle, WA, USA, 13–19 June 2020. [Google Scholar]
- Redmon, J.; Divvala, S.; Girshick, R. You Only Look Once: Unified, Real-Time Object Detection. In Proceedings of the 2016 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Las Vegas, NV, USA, 27–30 June 2016. [Google Scholar]
- Sun, C.; Shrivastava, A.; Singh, S. Revisiting unreasonable effectiveness of data in deep learning era. In Proceedings of the IEEE International Conference on Computer Vision (ICCV), Venice, Italy, 22–29 October 2017. [Google Scholar]
- Karg, B.; Lucia, S. Efficient representation and approximation of model predictive control laws via deep learning. IEEE Trans. Cybern. 2020, 50, 3866–3878. [Google Scholar] [CrossRef]
- Chiu, M.C.; Chen, T.M. Applying data augmentation and mask R-CNN-based instance segmentation method for mixed-type wafer maps defect patterns classification. IEEE Trans. Semicond. Manuf. 2021, 34, 455–463. [Google Scholar] [CrossRef]
- Wang, W.; Tan, X.; Zhang, P. A CBAM Based Multiscale Transformer Fusion Approach for Remote Sensing Image Change Detection. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2022, 15, 6817–6825. [Google Scholar] [CrossRef]
- Zhang, Y.; Chen, G.; Cai, Z. Small Target Detection Based on Squared Cross Entropy and Dense Feature Pyramid Networks. IEEE Access 2021, 9, 55179–55190. [Google Scholar] [CrossRef]
- He, K.M.; Zhang, X.; Ren, S. Deep residual learning for image recognition. In Proceedings of the 2016 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Las Vegas, NV, USA, 27–30 June 2016. [Google Scholar]
- Wang, C.Y.; Liao, H.Y.M.; Wu, Y.H. CSPNet: A new backbone that can enhance learning capability of CNN. In Proceedings of the IEEE/CVF Conference on Computer vision and Pattern Recognition Workshops, Seattle, WA, USA, 14–19 June 2020. [Google Scholar]
- Carion, N.; Massa, F.; Synnaeve, G. End-to-end object detection with transformers. In European Conference on Computer Vision; Springer: Cham, Switzerland, 2020. [Google Scholar]
- Wang, C.Y.; Yeh, I.H.; Liao, H.Y.M. You only learn one representation: Unified network for multiple tasks. arXiv 2021, arXiv:2105.04206. [Google Scholar]
- Zhou, X.; Koltun, V.; Krähenbühl, P. Probabilistic two-stage detection. arXiv 2021, arXiv:2103.07461. [Google Scholar]
- Lin, T.Y.; Goyal, P.; Girshick, R. Focal loss for dense object detection. In Proceedings of the IEEE International Conference on Computer Vision (ICCV), Venice, Italy, 22–29 October 2017. [Google Scholar]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Methods | Landmark Pattern Type | Landing Accuracy | Test Type | |
|---|---|---|---|---|
| [26] | Feature point extraction, area segmentation, and motion estimation. | Square | Position 5 cm Pose 5° | Landing test |
| [27] | Optical flow sensor, fixed threshold, segmentation, and contour detection. | Orthohexagon and circular | Position 3.8cm | Landing test |
| [28] | Contour extraction and filtering. | ArUco | 10% error rate | Landing test |
| [29] | Optical flow sensors and extended Kalman filter | Square | Position 6.4 cm pose 0.08° | Landing test |
| [30] | Histogram of oriented gradients (HOG) and normalized cross-correlation (NCC). | AprilTag | Landing error within (−20 cm, +50 cm) | Landing test |
| [31] | Canny, Adaptive thresholding and Levenberg–Marquardt (LM). | Combination patterns | Position < 10 cm | Simulation |
| [32] | Contour extraction and 3D rigid body transformation. | AprilTag | X: 0.47 cm Y: 0.42 cm | Simulation |
| Data Division | Training Set | Validation Set | Test Set |
|---|---|---|---|
| Training set:Validation set:Test set = 2:2:6 High:Low:Ultra Low = 4:2:4 | 1557 | 1769 | 4185 |
| Train Set | Validation Set | Test Set | AP50 (%) | mAP (%) |
|---|---|---|---|---|
| 970 (synthetic images) | 1769 | 4145 | 51.8 | 33.6% |
| 587 (real images) | 1769 | 4145 | 92.8 | 76.3 |
| 1557 (real images + synthetic images) | 1769 | 4145 | 95.5 | 77.3 |
| Attentional Mechanisms | mAP (%) (Small Targets) | mAP (%) (Medium Targets) | mAP (%) (Large Targets) | FPS |
|---|---|---|---|---|
| No | 35.7 | 66.3 | 87.2 | 149.9 |
| Yes | 36.2 | 68.3 | 87.1 | 53.7 |
| Model | FPS | mAP (%) | AP50 (%) | AP75 (%) |
|---|---|---|---|---|
| DETR [46] | 4.93 | 43.1 | 76.4 | 46.9 |
| YOLOR [47] | 26.5 | 61.2 | 91.5 | 75.2 |
| CenterNet2 [48] | 10 | 62.3 | 85.8 | 75.8 |
| Faster-rcnn [31] | 11.45 | 64.1 | 88.9 | 77.1 |
| RetinaNet [49] | 6.89 | 62.6 | 93.4 | 76.6 |
| A-YOLOX[OURS] | 53.7 | 77.3 | 95.5 | 84.6 |
| Test Serial Number | X-Direction (Unit: cm) | Y-Direction (Unit: cm) | Image Number |
|---|---|---|---|
| 1 | 5.5 | 2.1 | 01 |
| 2 | 1.0 | 2.4 | 02 |
| 3 | 2.7 | 4.1 | 03 |
| 4 | 1.0 | 3.1 | 04 |
| 5 | 4.0 | 2.5 | 05 |
| 6 | 2.5 | 4.5 | 06 |
| 7 | 6.3 | 0.8 | 07 |
| 8 | 2.0 | 0 | 08 |
| 9 | 0.5 | 0.5 | 09 |
| 10 | 0 | 0 | 10 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xu, Y.; Zhong, D.; Zhou, J.; Jiang, Z.; Zhai, Y.; Ying, Z. A Novel UAV Visual Positioning Algorithm Based on A-YOLOX. Drones 2022, 6, 362. https://doi.org/10.3390/drones6110362
Xu Y, Zhong D, Zhou J, Jiang Z, Zhai Y, Ying Z. A Novel UAV Visual Positioning Algorithm Based on A-YOLOX. Drones. 2022; 6(11):362. https://doi.org/10.3390/drones6110362
Chicago/Turabian StyleXu, Ying, Dongsheng Zhong, Jianhong Zhou, Ziyi Jiang, Yikui Zhai, and Zilu Ying. 2022. "A Novel UAV Visual Positioning Algorithm Based on A-YOLOX" Drones 6, no. 11: 362. https://doi.org/10.3390/drones6110362
APA StyleXu, Y., Zhong, D., Zhou, J., Jiang, Z., Zhai, Y., & Ying, Z. (2022). A Novel UAV Visual Positioning Algorithm Based on A-YOLOX. Drones, 6(11), 362. https://doi.org/10.3390/drones6110362