
Occlusion-Aware UAV Path Planning for Reconnaissance and Surveillance



Abstract
:1. Introduction
2. Surveillance Algorithm at a Given Altitude
2.1. Problem Statement
2.2. Surveillance Algorithm
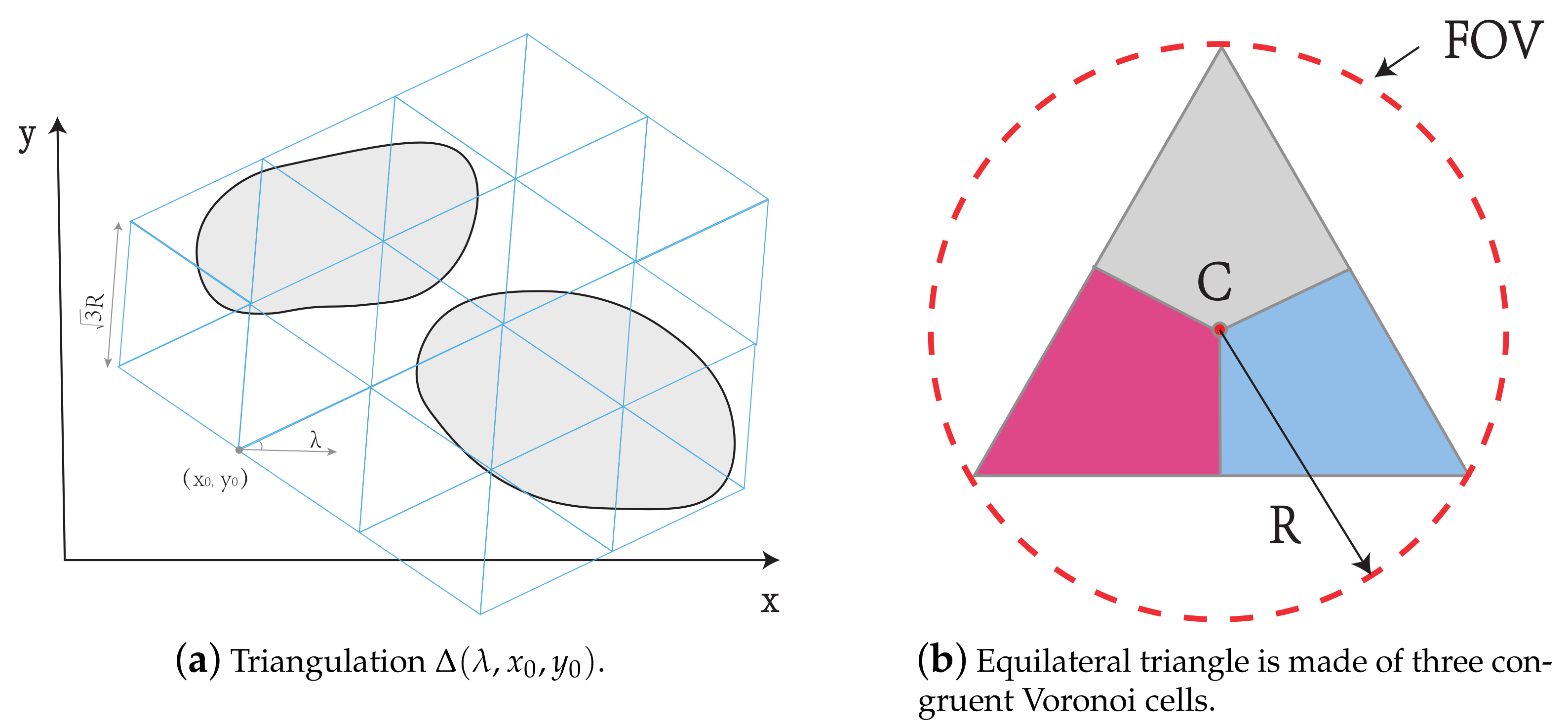
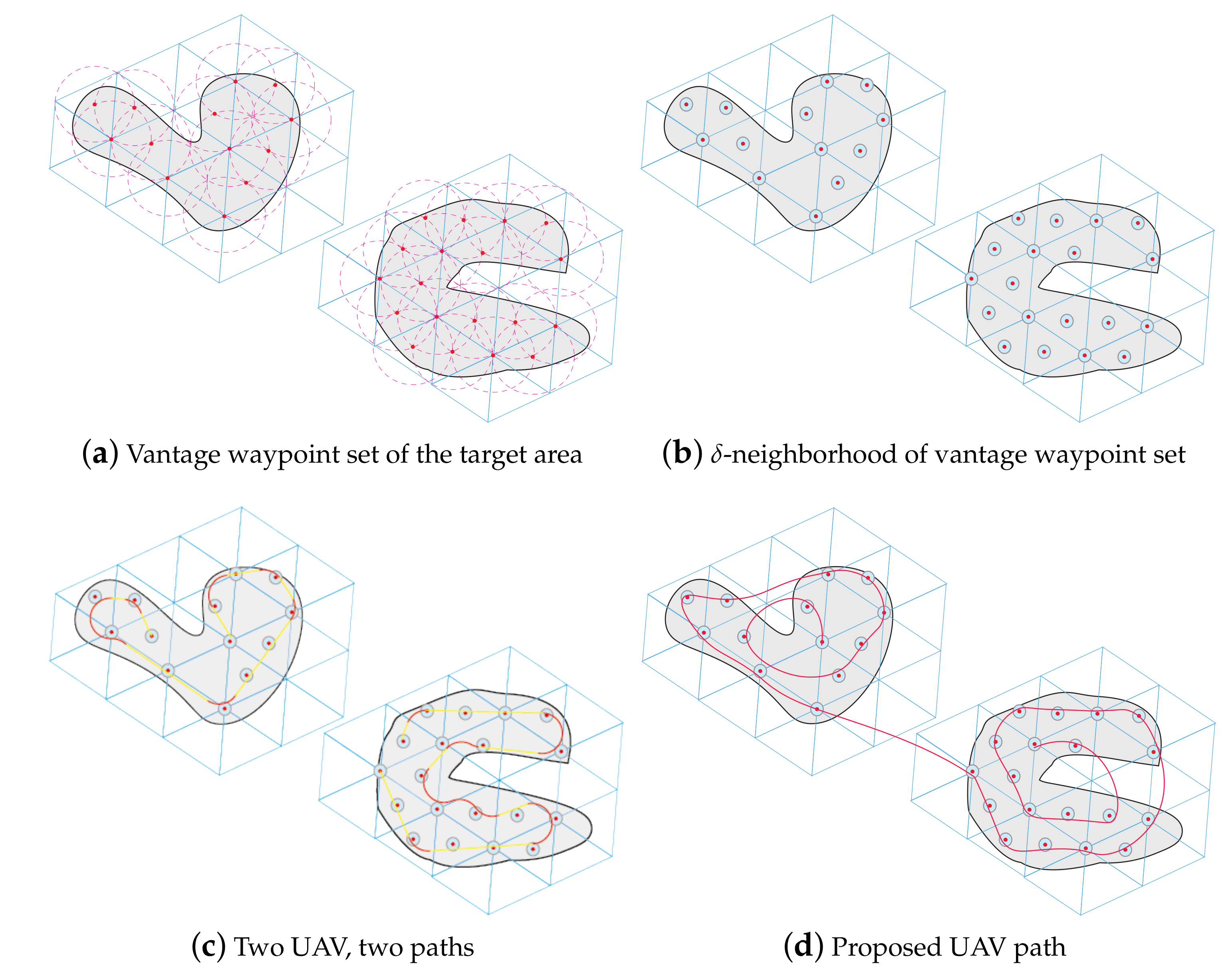
2.2.1. Stage One: Waypoint Generation
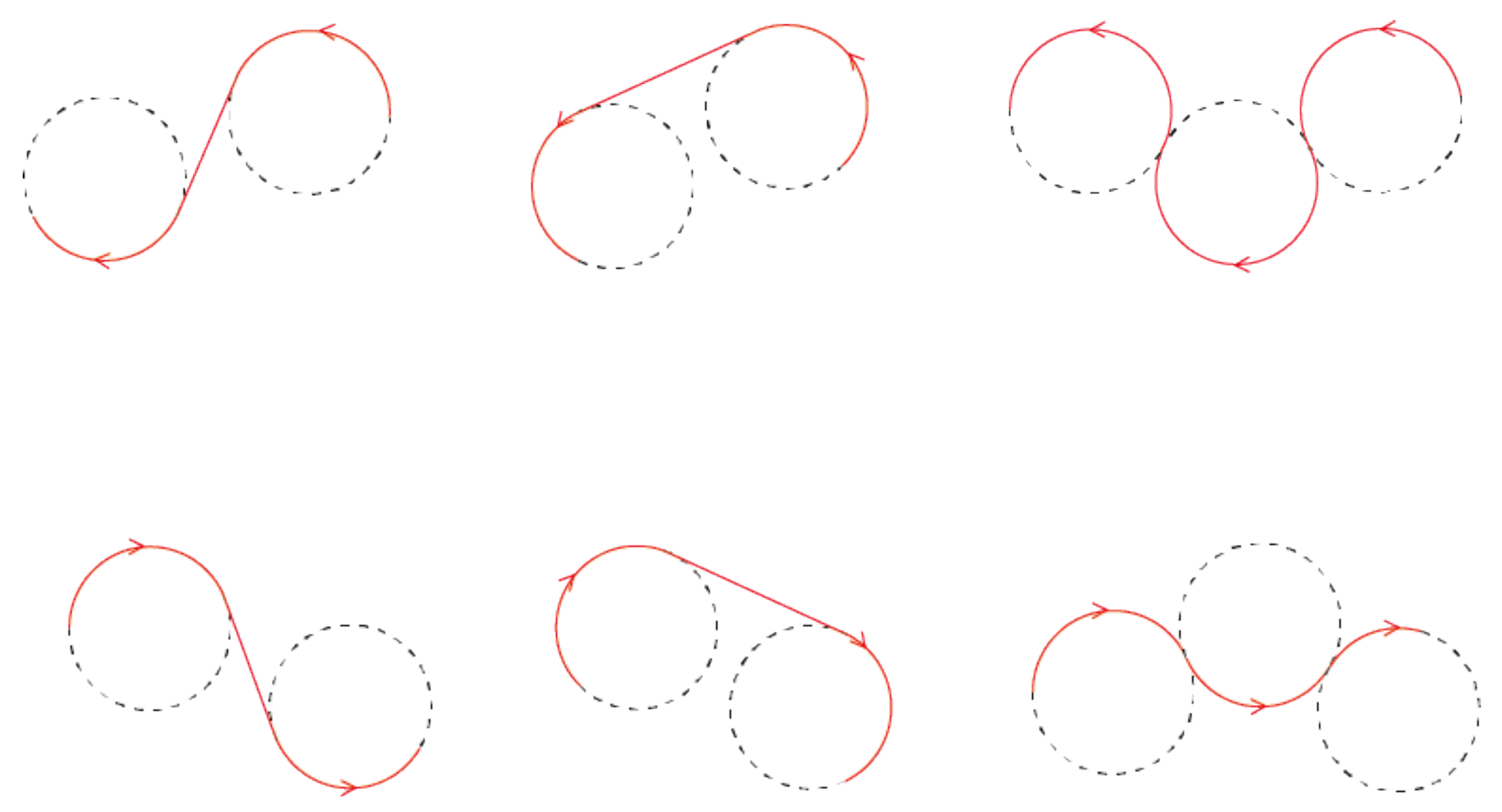
2.2.2. Stage Two: UAV Path Planning for Surveillance
2.3. Simulation Results
2.3.1. Single-Area Surveillance
2.3.2. Multiple Disjoint Areas Surveillance
3. Surveillance Algorithm at Different Altitudes
3.1. Problem Statement
3.2. Surveillance Algorithm
3.2.1. Stage One: Vantage Waypoint Set Generation
| Algorithm 1 Vantage Waypoint Set Generation |
|
3.2.2. Stage Two: UAV Path Planning for Surveillance
- 1
- Once the surveillance path for single UAV is generated, we can distribute multiple UAVs travel along the same path as the single UAV, but with different initial position to avoid collisions. To avoid collisions, the initial deployment of UAVs must be coordinated with the drone’s velocity and the length of the path, by, for instance, evenly spacing the appropriate number of UAVs along the determined trajectory. Thereafter, each UAV can perform its surveillance duty independently without further coordination. This method can markedly reduce the surveillance circle or duration, and significantly increase the frequency and intensity of surveillance.
- 2
- The vantage waypoint set can be partitioned into several subsets, and dedicated UAV(s) can traverse through each subset independently. In the case of multiple UAVs, we may use the aforementioned method to perform collision-free monitoring tasks.
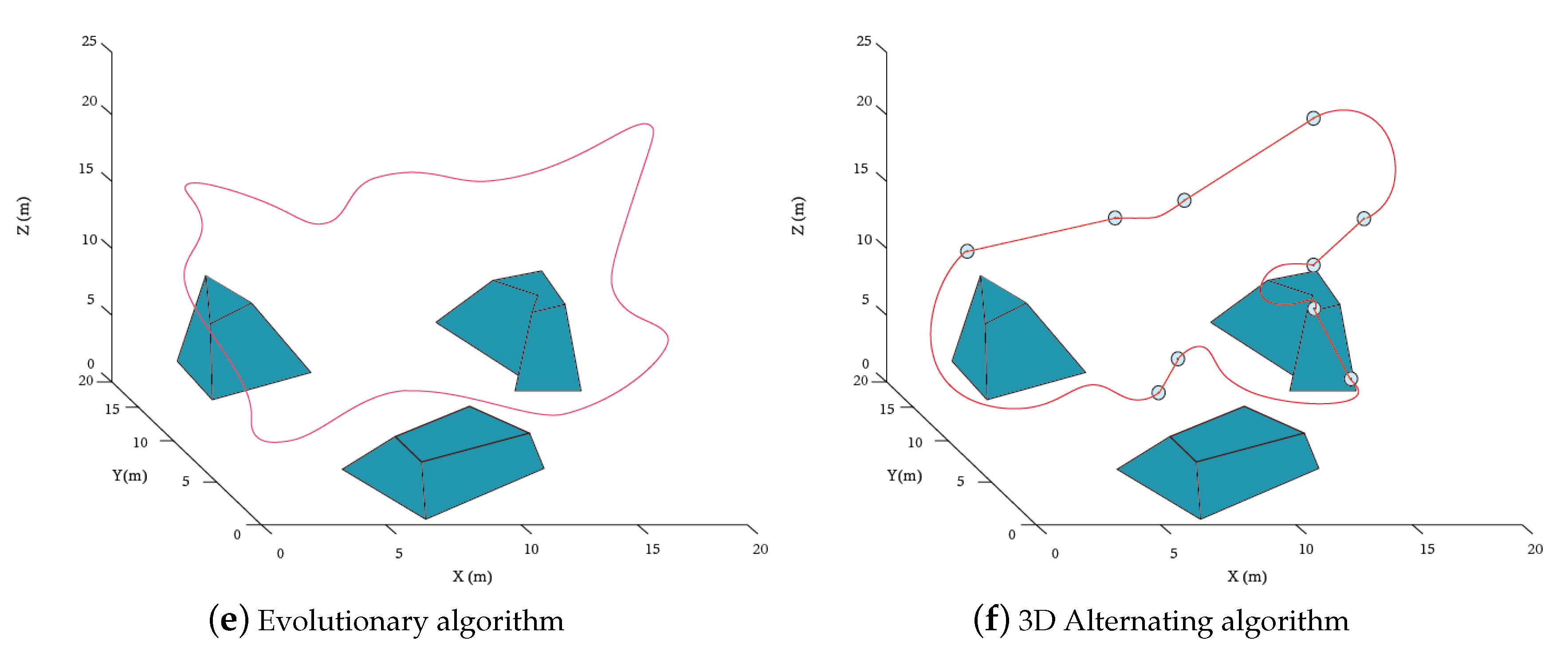
3.3. Simulation Results
| Algorithm 2 UAV Path-Planning Algorithm |
|
3.3.1. Single-Area Single UAV
3.3.2. Single-Area Multiple UAVs
4. Conclusions and Future Work
Author Contributions
Funding
Conflicts of Interest
References
- Castelli, T.; Sharghi, A.; Harper, D.; Tremeau, A.; Shah, M. Autonomous navigation for low-altitude UAVs in urban areas. arXiv 2016, arXiv:1602.08141. [Google Scholar]
- Girard, A.R.; Howell, A.S.; Hedrick, J.K. Border patrol and surveillance missions using multiple unmanned air vehicles. In Proceedings of the IEEE Conference on Decision and Control, Nassau, Bahamas, 14–17 December 2004; Volume 1, pp. 620–625. [Google Scholar] [CrossRef]
- Ozkan, O.; Kaya, M. UAV routing with genetic algorithm based matheuristic for border security missions. Int. J. Optim. Control Theor. Appl. 2021, 11, 128–138. [Google Scholar] [CrossRef]
- Tomic, T.; Schmid, K.; Lutz, P.; Domel, A.; Kassecker, M.; Mair, E.; Grixa, I.; Ruess, F.; Suppa, M.; Burschka, D. Toward a fully autonomous UAV: Research platform for indoor and outdoor urban search and rescue. IEEE Robot. Autom. Mag. 2012, 19, 46–56. [Google Scholar] [CrossRef] [Green Version]
- Silvagni, M.; Tonoli, A.; Zenerino, E.; Chiaberge, M. Multipurpose UAV for search and rescue operations in mountain avalanche events. Geomat. Nat. Hazards Risk 2017, 8, 18–33. [Google Scholar] [CrossRef] [Green Version]
- Calì, M.; Ambu, R. Advanced 3D photogrammetric surface reconstruction of extensive objects by UAV camera image acquisition. Sensors 2018, 18, 2815. [Google Scholar] [CrossRef] [Green Version]
- Mittal, M.; Mohan, R.; Burgard, W.; Valada, A. Vision-Based Autonomous UAV Navigation and Landing for Urban Search and Rescue. arXiv 2019, arXiv:1906.01304. [Google Scholar]
- Metni, N.; Hamel, T. A UAV for bridge inspection: Visual servoing control law with orientation limits. Autom. Constr. 2007, 17, 3–10. [Google Scholar] [CrossRef]
- Savkin, A.V.; Huang, H. Asymptotically Optimal Deployment of Drones for Surveillance and Monitoring. Sensors 2019, 19, 2068. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Li, K.; Voicu, R.C.; Kanhere, S.S.; Ni, W.; Tovar, E. Energy efficient legitimate wireless surveillance of UAV communications. IEEE Trans. Veh. Technol. 2019, 68, 2283–2293. [Google Scholar] [CrossRef]
- Zhang, J. Occlusion-aware UAV Path Planning for Reconnaissance and Surveillance in Complex Environments. In Proceedings of the 2019 IEEE International Conference on Robotics and Biomimetics (ROBIO), Dali, China, 6–8 December 2019; pp. 1435–1440. [Google Scholar] [CrossRef]
- Huang, H.; Savkin, A.V. An algorithm of reactive collision free 3-d deployment of networked unmanned aerial vehicles for surveillance and monitoring. IEEE Trans. Ind. Inform. 2020, 16, 132–140. [Google Scholar] [CrossRef]
- Zelinsky, A.; Jarvis, R.; Byrne, J.; Yuta, S. Planning paths of complete coverage of an unstructured environment by a mobile robot. Proc. Int. Conf. Adv. Robot. 1993, 13, 533–538. [Google Scholar] [CrossRef]
- Koyuncu, E.; Shabanighazikelayeh, M.; Seferoglu, H. Deployment and trajectory optimization of UAVs: A quantization theory approach. IEEE Trans. Wirel. Commun. 2018, 17, 8531–8546. [Google Scholar] [CrossRef] [Green Version]
- Nemer, I.A.; Sheltami, T.R.; Mahmoud, A.S. A game theoretic approach of deployment a multiple UAVs for optimal coverage. Transp. Res. Part A Policy Pract. 2020, 140, 215–230. [Google Scholar] [CrossRef]
- Stodola, P.; Drozd, J.; Mazal, J.; Hodický, J.; Procházka, D. Cooperative Unmanned Aerial System Reconnaissance in a Complex Urban Environment and Uneven Terrain. Sensors 2019, 19, 3754. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Roberge, V.; Tarbouchi, M.; Labonté, G. Fast genetic algorithm path planner for fixed-wing military UAV using GPU. IEEE Trans. Aerosp. Electron. Syst. 2018, 54, 2105–2117. [Google Scholar] [CrossRef]
- Zhao, Y.; Zheng, Z.; Liu, Y. Survey on computational-intelligence-based UAV path planning. Knowl.-Based Syst. 2018, 158, 54–64. [Google Scholar] [CrossRef]
- Li, X.; Savkin, A.V. Networked Unmanned Aerial Vehicles for Surveillance and Monitoring: A Survey. Future Internet 2021, 13, 174. [Google Scholar] [CrossRef]
- Kellenberger, B.; Marcos, D.; Lobry, S.; Tuia, D. Half a percent of labels is enough: Efficient animal detection in UAV imagery using deep CNNs and active learning. IEEE Trans. Geosci. Remote Sens. 2019, 57, 9524–9533. [Google Scholar] [CrossRef] [Green Version]
- Liu, Y.; Wang, Q.; Hu, H.; He, Y. A novel real-time moving target tracking and path planning system for a quadrotor UAV in unknown unstructured outdoor scenes. IEEE Trans. Syst. Man Cybern. Syst. 2018, 49, 2362–2372. [Google Scholar] [CrossRef] [Green Version]
- Geng, L.; Zhang, Y.F.; Wang, J.J.; Fuh, J.Y.; Teo, S.H. Mission planning of autonomous UAVs for urban surveillance with evolutionary algorithms. In Proceedings of the 2013 10th IEEE International Conference on Control and Automation (ICCA), Hangzhou, China, 12–14 June 2013; pp. 828–833. [Google Scholar] [CrossRef]
- Zhang, J.; Zhang, Y. A Method for UAV Reconnaissance and Surveillance in Complex Environments. In Proceedings of the 2020 6th International Conference on Control, Automation and Robotics (ICCAR), Singapore, 20–23 April 2020; pp. 482–485. [Google Scholar] [CrossRef]
- Hoy, M.; Matveev, A.S.; Savkin, A.V. Algorithms for collision-free navigation of mobile robots in complex cluttered environments: A survey. Robotica 2015, 33, 463–497. [Google Scholar] [CrossRef] [Green Version]
- Semsch, E.; Jakob, M.; Pavlíček, D.; Pěchouček, M. Autonomous UAV surveillance in complex urban environments. In Proceedings of the 2009 IEEE/WIC/ACM International Conference on Intelligent Agent Technology, IAT 2009, Milan, Italy, 15–18 September 2009; Volume 2, pp. 82–85. [Google Scholar] [CrossRef]
- Dubins, L.E. On Curves of Minimal Length with a Constraint on Average Curvature, and with Prescribed Initial and Terminal Positions and Tangents. Am. J. Math. 1957, 79, 497. [Google Scholar] [CrossRef]
- Ismail, A.; Tuyishimire, E.; Bagula, A. Generating dubins path for fixed wing uavs in search missions. In International Symposium on Ubiquitous Networking; Springer: Cham, Switzerland, 2018; pp. 347–358. [Google Scholar]
- Kučerová, K.; Váň, P.; Faigl, J. On finding time-efficient trajectories for fixed-wing aircraft using dubins paths with multiple radii. In Proceedings of the 35th Annual ACM Symposium on Applied Computing, Brno, Czech Republic, 30 March–3 April 2020; pp. 829–831. [Google Scholar]
- Manchester, I.R.; Savkin, A.V. Circular navigation missile guidance with incomplete information and uncertain autopilot model. J. Guid. Control Dyn. 2004, 27, 1078–1083. [Google Scholar] [CrossRef] [Green Version]
- Fathi, Z.; Bidabad, B.; Najafpour, M. An exact penalty function method for optimal control of a dubins airplane in the presence of moving obstacles. Optim. Lett. 2021. [Google Scholar] [CrossRef]
- Carothers, N.L. Real Analysis; Cambridge University Press: Cambridge, UK, 2000. [Google Scholar] [CrossRef]
- Forsyth, D.; Ponce, J. Computer Vision: A Modern Approach; Prentice Hall: Englewood Cliffs, NJ, USA, 2011. [Google Scholar]
- Savkin, A.V.; Huang, H. Deployment of unmanned aerial vehicle base stations for optimal quality of coverage. IEEE Wirel. Commun. Lett. 2019, 8, 321–324. [Google Scholar] [CrossRef]
- Savla, K. Multi UAV Systems with Motion and Communication Constraints. Ph.D. Thesis, University of California, Santa Barbara, CA, USA, 2007. [Google Scholar]
- Govindaraju, V.; Leng, G.; Qian, Z. Multi-UAV surveillance over forested regions. Photogramm. Eng. Remote Sens. 2014, 80, 1129–1137. [Google Scholar] [CrossRef]
- Mirjalili, S.; Mirjalili, S.M.; Lewis, A. Grey wolf optimizer. Adv. Eng. Softw. 2014, 69, 46–61. [Google Scholar] [CrossRef] [Green Version]
- Marengoni, M.; Draper, B.A.; Hanson, A.; Sitaraman, R. A System to place observers on a polyhedral terrain in polynomial time. Image Vis. Comput. 2000, 18, 773–780. [Google Scholar] [CrossRef]
- Savkin, A.; Huang, H. Proactive Deployment of Aerial Drones for Coverage over Very Uneven Terrains: A Version of the 3D Art Gallery Problem. Sensors 2019, 19, 1438. [Google Scholar] [CrossRef] [Green Version]
- Fisk, S. A short proof of Chvátal’s Watchman Theorem. J. Comb. Theory Ser. B 1978, 24, 374. [Google Scholar] [CrossRef] [Green Version]
- Faigl, J.; Vana, P. Surveillance Planning with Bézier Curves. IEEE Robot. Autom. Lett. 2018, 3, 750–757. [Google Scholar] [CrossRef]
- Kohonen, T.; Schroeder, M.R.; Huang, T.S. (Eds.) Self-Organizing Maps, 3rd ed.; Springer: Berlin/Heidelberg, Germany, 2001. [Google Scholar]
- Vana, P.; Faigl, J. On the Dubins Traveling Salesman Problem with Neighborhoods. IEEE Int. Conf. Intell. Robot. Syst. 2015, 2015, 4029–4034. [Google Scholar] [CrossRef]
- Cheng, P.; Keller, J.; Kumar, V. Time-optimal UAV trajectory planning for 3D urban structure coverage. In Proceedings of the 2008 IEEE/RSJ International Conference on Intelligent Robots and Systems, IROS, Nice, France, 22–26 September 2008; pp. 2750–2757. [Google Scholar] [CrossRef]
- Geng, L.; Zhang, Y.F.; Wang, P.F.; Wang, J.J.; Fuh, J.Y.; Teo, S.H. UAV surveillance mission planning with gimbaled sensors. In Proceedings of the IEEE International Conference on Control and Automation (ICCA), Taichung, Taiwan, 18–20 June 2014; pp. 320–325. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Algorithm | Time (s) |
|---|---|
| SA | 3.21 |
| AA | 3.69 |
| GWO | 16.14 |
| GA | 10.36 |
| Proposed | 4.84 |
| Algorithm | Single-Area Single UAV | Single-Area Multiple UAVs (Two UAVs, Two Paths) |
|---|---|---|
| TOS | 3.48 | 4.53 |
| 3DAA | 4.74 | 5.12 |
| EA | 5.30 | 5.91 |
| Proposed | 5.14 | 6.35 |
| Algorithm | Scenario | Average Velocity (m/s) | Minimum Coverage Time (s) |
|---|---|---|---|
| TOS | Single-Area Single UAV | 6.5 | 22.2 |
| Single-Area Multiple UAVs (Three UAVs, three paths) | 5.1 | 7.4 | |
| 3DAA | Single-Area Single UAV | 6.5 | 13.6 |
| Single-Area Multiple UAVs (Two UAVs, two paths) | 6.5 | 8.7 | |
| EA | Single-Area Single UAV | 6.6 | 12.5 |
| Single-Area Multiple UAVs (Two UAVs, two paths) | 6.8 | 6.5 | |
| Proposed | Single-Area Single UAV | 6.8 | 7.9 |
| Single-Area Multiple UAVs (Two UAVs, two paths) | 6.8 | 4.2 |
| Camera | ||||||
|---|---|---|---|---|---|---|
| c | ||||||
| 4 m | 1 m | 0.5 m | 0.2 m | |||
| Mobility of UAV for proposed method | Mobility of UAV for time-optimal method | |||||
| 0.5 m/s | 1.2 m/s | 0.5 m/s | 1.2 m/s | 0.5 m/s | 0.5 m/s | 1.2 m/s |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, J.; Huang, H. Occlusion-Aware UAV Path Planning for Reconnaissance and Surveillance. Drones 2021, 5, 98. https://doi.org/10.3390/drones5030098
Zhang J, Huang H. Occlusion-Aware UAV Path Planning for Reconnaissance and Surveillance. Drones. 2021; 5(3):98. https://doi.org/10.3390/drones5030098
Chicago/Turabian StyleZhang, Jian, and Hailong Huang. 2021. "Occlusion-Aware UAV Path Planning for Reconnaissance and Surveillance" Drones 5, no. 3: 98. https://doi.org/10.3390/drones5030098
APA StyleZhang, J., & Huang, H. (2021). Occlusion-Aware UAV Path Planning for Reconnaissance and Surveillance. Drones, 5(3), 98. https://doi.org/10.3390/drones5030098