
Development of UAV-Based PM2.5 Monitoring System

 ,
,  ,
, 
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Materials and Methods
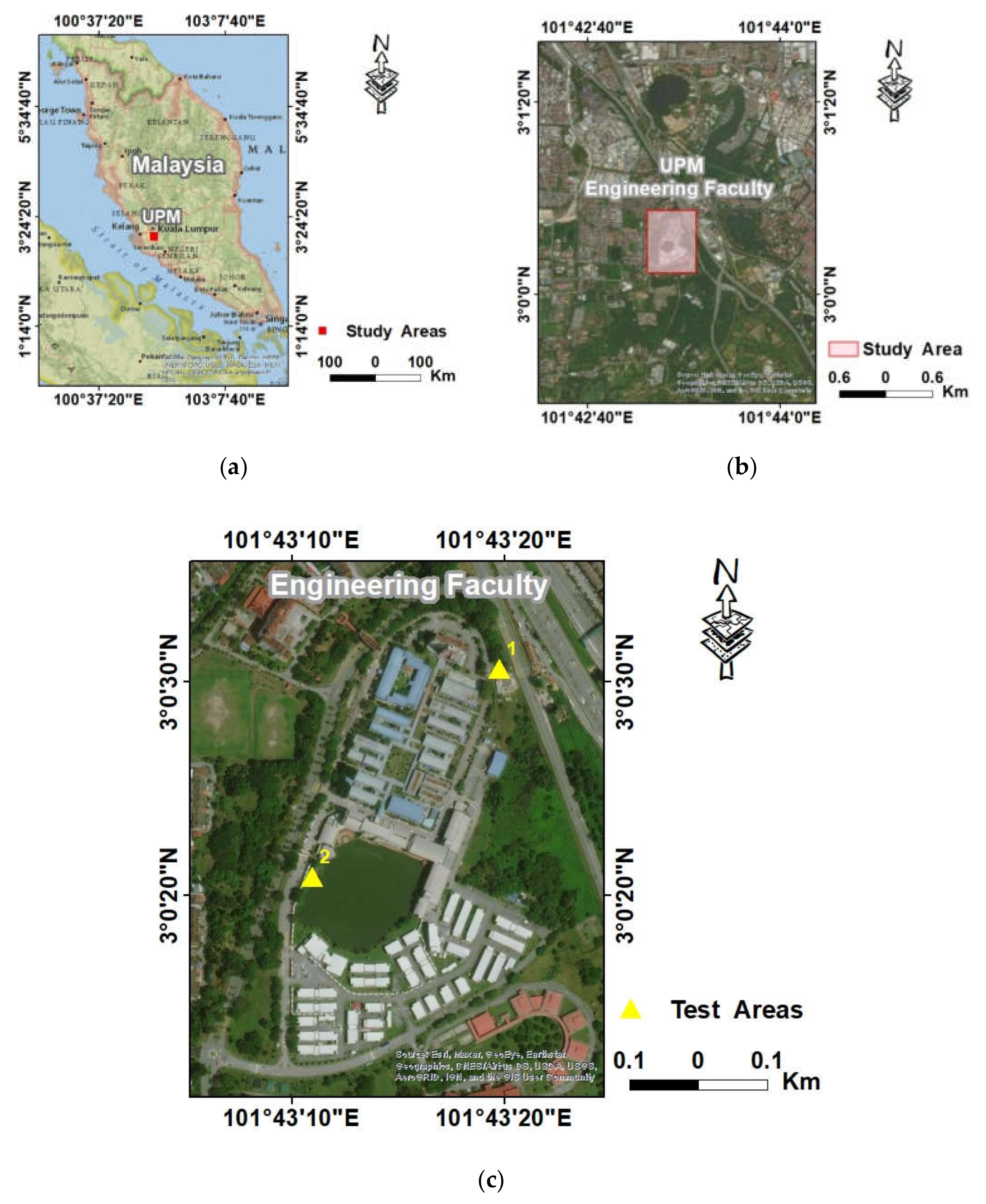
2.1. Study Area
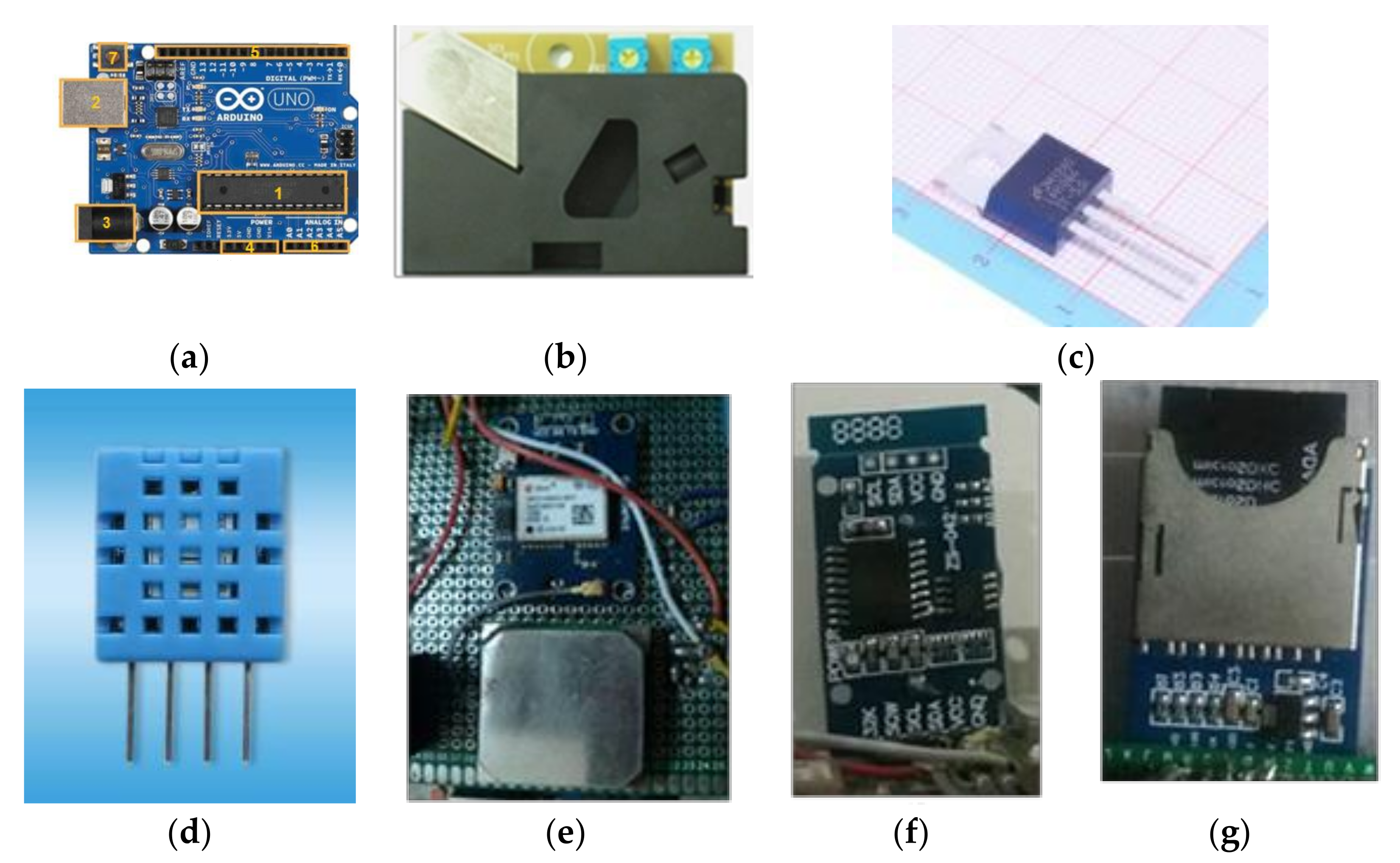
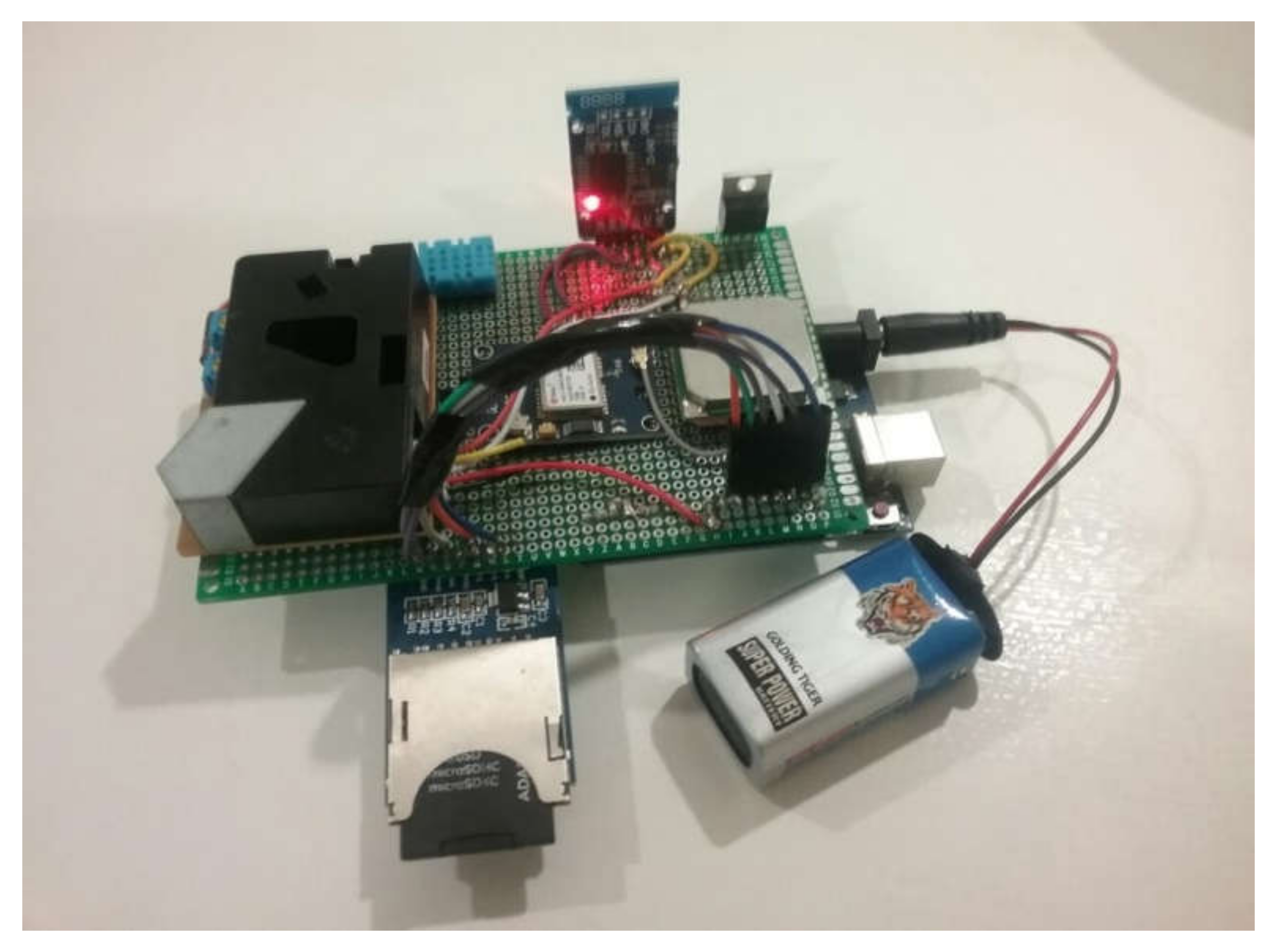
2.2. System Components
- 1-Arduino UNO R3 board;
- 1-Dust sensor module (DSM501A);
- 1-Regulator (LM1084);
- 1-Temperature and humidity sensor;
- 1-GPS module (model #: NEO-6M);
- 1-Real-Time Module DS3231;
- 1-SD card Logging Shield and memory for data storage.
2.2.1. Arduino Uno R3 Board
- Microcontroller;
- USB port;
- DC power jack;
- Power pins;
- Digital Inputs/Output pins;
- Analog Pins;
- Reset Bottom.
2.2.2. Dust Sensor Module (DSM501A)
- Light Emitting Diode (LED) lamp;
- The detector;
- The signal amplifier circuit;
- The output drive circuit1;
- The output drive circuit2;
- The heater induced air flow.
2.2.3. Regulator (LM1084)
2.2.4. Temperature and Humidity Sensor Module (DHT11)
2.2.5. NEO-6M GPS Module Compatible with Arduino UNO R3
2.2.6. Real-Time Module (DS3231)
2.2.7. Arduino DIY SD Card Logging Shield
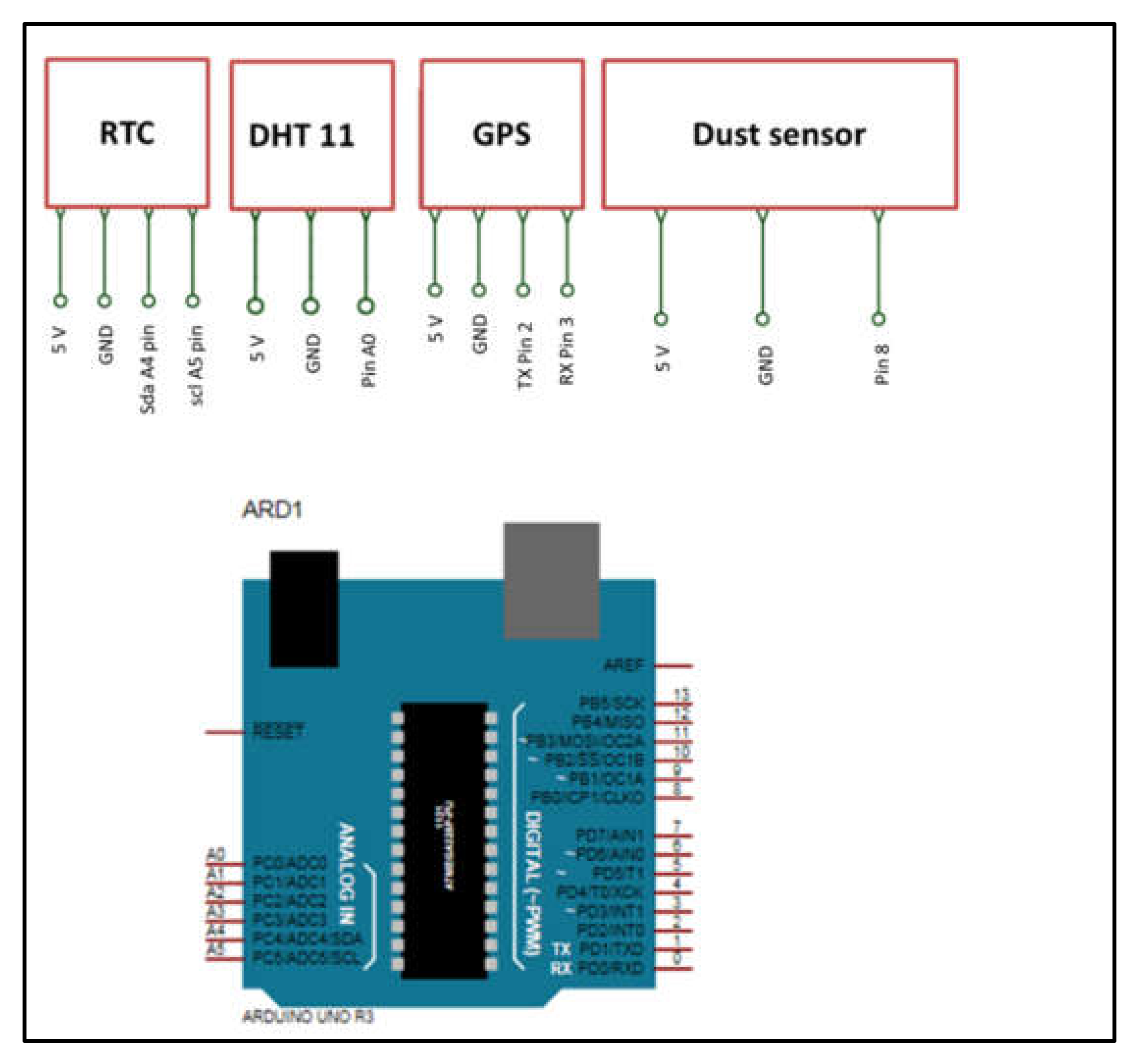
2.3. Project Circuit
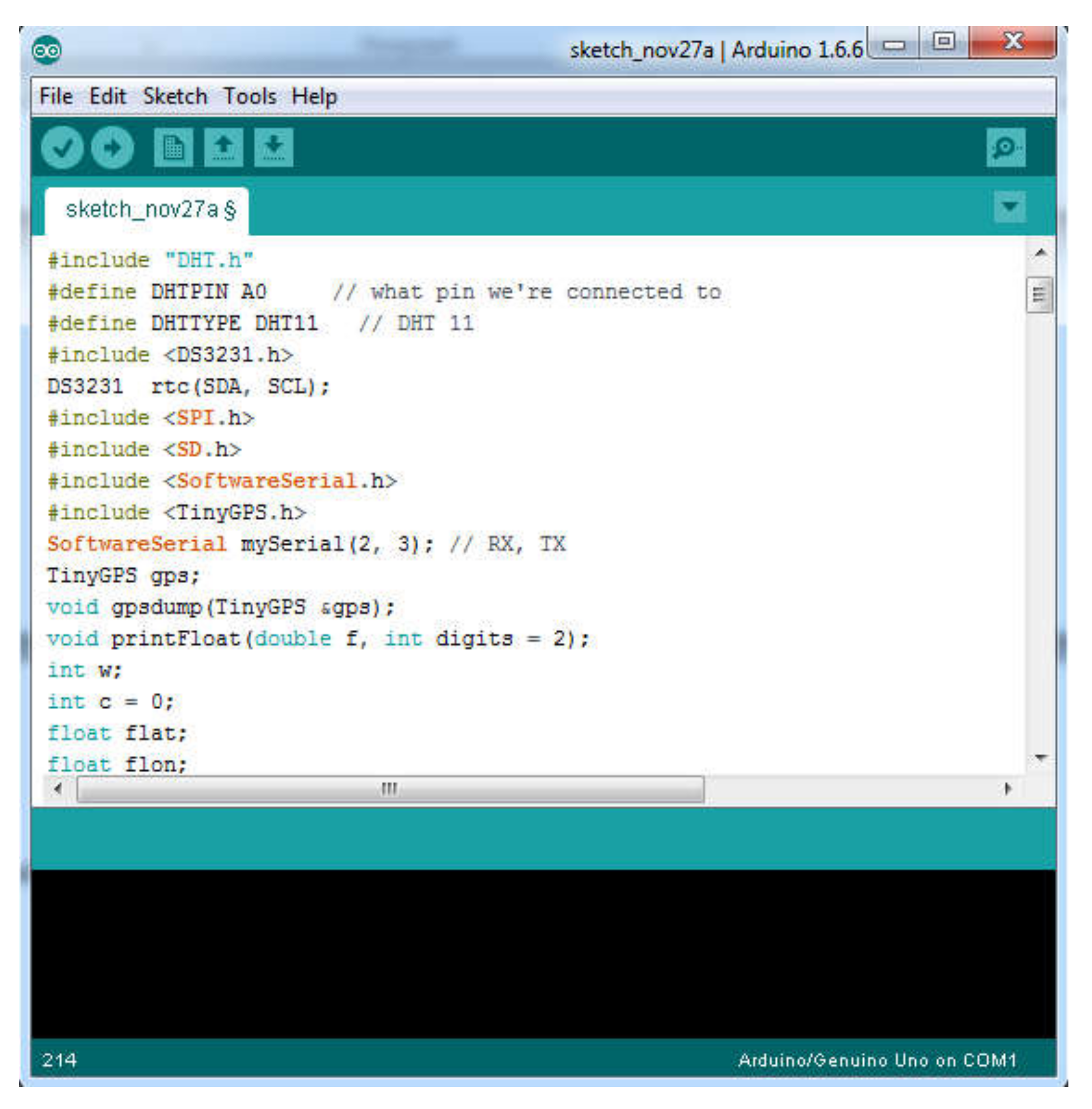
2.4. Software and Code
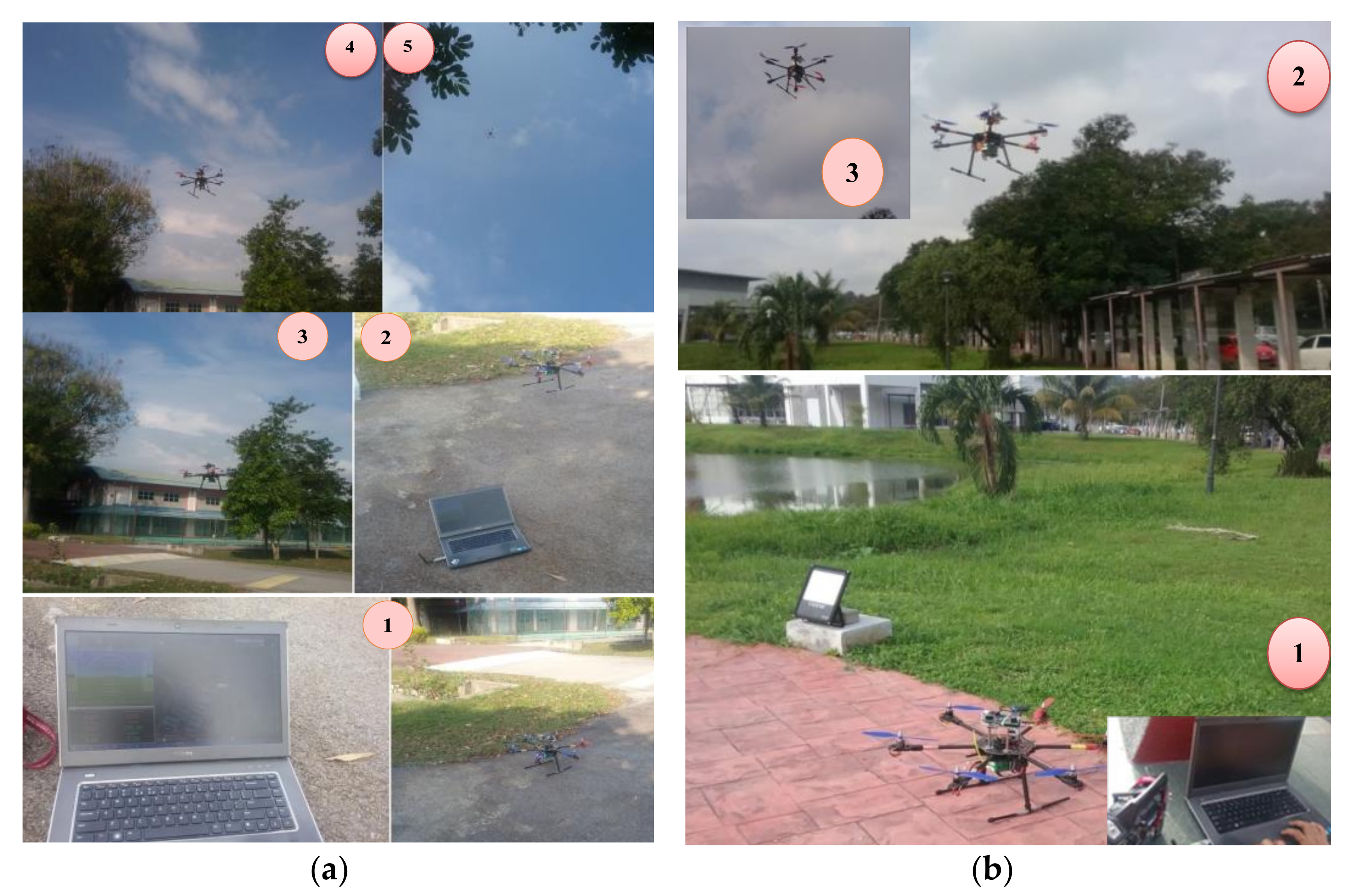
2.5. In Situ Data Collection and UAV
2.5.1. Test Area I
2.5.2. Test Area II
3. Experimental Setup and Results
3.1. System Design
- Consist of readymade sensors;
- Calibration can be done by programmable digital microcontroller;
- Simple design and available materials;
- Measure PM2.5, humidity and temperature besides position information with the date and time;
- The system can be easily extended (adding other sensors and identifying board model);
- Multi-purpose, multi-fields;
- The overall assembly time is short;
- Can be powered by an external supply using a battery;
- Portable, small size and lightweight;
- Low cost in comparison with other devices.
3.2. UAV-Based PM2.5 Monitoring System Evaluation Results
3.2.1. Field Test Area I Results
3.2.2. Field Test Area II Results
3.3. Ground Monitoring Evaluation Results
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Tahir, N.M.; Suratman, S.; Fong, F.T.; Hamzah, M.S.; Latif, M.T. Temporal distribution and chemical characterization of atmospheric particulate matter in the eastern coast of Peninsular Malaysia. Aerosol Air Qual. Res. 2013, 13, 584–595. [Google Scholar] [CrossRef] [Green Version]
- Lekinwala, N.L.; Bhardwaj, A.; Raman, R.S.; Bhushan, M.; Bali, K.; Dey, S. A framework for setting up a country-wide network of regional surface PM2. 5 sampling sites utilising a satellite-derived Proxy–The COALESCE project, India. Atmos. Environ. 2020, 234, 117544. [Google Scholar] [CrossRef]
- Jumaah, H.J.; Ameen, M.H.; Kalantar, B.; Rizeei, H.M.; Jumaah, S.J. Air quality index prediction using IDW geostatistical technique and OLS-based GIS technique in Kuala Lumpur, Malaysia. Geomat. Nat. Hazards Risk 2019, 10, 2185–2199. [Google Scholar] [CrossRef]
- Amir, A. Air Pollution Trends in Petaling Jaya. Ph.D. Dissertation, Universiti Putra Malaysia, Selangor, Malaysia, 2007. [Google Scholar]
- Budde, M.; Zhang, L.; Beigl, M. Distributed, low-cost particulate matter sensing: Scenarios, challenges, approaches. In Proceedings of the 1st International Conference on Atmospheric Dust, Castellaneta Marina, Italy, 1–6 June 2014; pp. 230–236. [Google Scholar]
- Tian, J. Integration of Satellite Remote Sensing and Ground-based Measurement for Modelling the Spatiotemporal Distribution of Fine Particulate Matter at a Regional Scale. Ph.D. Thesis, Queen’s University Kingston, Kingston, ON, Canada, 2008. [Google Scholar]
- Sevusu, P. Real-Time Air Quality Measurements Using Mobile Platforms. Ph.D. Dissertation, New Brunswick Rutgers, New Brunswick, NJ, USA, 2015. [Google Scholar]
- Xiong, X.; Shah, S.; Pallis, J.M. Balloon/Drone-based Aerial Platforms for Remote Particulate Matter Pollutant Monitoring. 2018. Available online: https://scholarworks.bridgeport.edu/xmlui/handle/123456789/2236 (accessed on 12 July 2021).
- Yang, Y.; Zheng, Z.; Bian, K.; Song, L.; Han, Z. Real-time profiling of fine-grained air quality index distribution using UAV sensing. IEEE Internet Things J. 2017, 5, 186–198. [Google Scholar] [CrossRef]
- Hemmelder, S.D. The Application and Suitability of Unmanned Airborne Vehicle Based Imagery to Determine River Dynamics: A Case Study of the Buëch in France. Master’s Thesis, Utrecht Univesity, Utrecht, The Netherlands, 2016. [Google Scholar]
- Alvear, O.; Calafate, C.T.; Hernández, E.; Cano, J.-C.; Manzoni, P. Mobile pollution data sensing using UAVs. In Proceedings of the 13th International Conference on Advances in Mobile Computing and Multimedia, Brussels, Belgium, 11–13 December 2015; pp. 393–397. [Google Scholar]
- Lambey, V.; Prasad, A.D. A review on air quality measurement using an unmanned aerial vehicle. Water Air Soil Pollut. 2021, 232, 1–32. [Google Scholar] [CrossRef]
- Al-Najjar, H.A.H.; Kalantar, B.; Pradhan, B.; Saeidi, V.; Halin, A.A.; Ueda, N.; Mansor, S. Land cover classification from fused DSM and UAV images using convolutional neural networks. Remote Sens. 2019, 11, 1461. [Google Scholar] [CrossRef] [Green Version]
- Ahmed, A.; Nagai, M.; Tianen, C.; Shibasaki, R. UAV based monitoring system and object detection technique development for a disaster area. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2008, 37, 373–377. [Google Scholar]
- Kalantar, B.; Mansor, S.B.; Abdul Halin, A.; Shafri, H.Z.M.; Zand, M. Multiple moving object detection from UAV videos using trajectories of matched regional adjacency graphs. IEEE Trans. Geosci. Remote Sens. 2017, 55. [Google Scholar] [CrossRef]
- Kalantar, B.; Ueda, N.; Al-Najjar, H.A.H.; Moayedi, H.; Halin, A.A.; Mansor, S. UAV and LiDAR image registration: A surf-based approach for ground control points selection. In Proceedings of the International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences—ISPRS Archives, Enschede, The Netherlands, 10–14 June 2019; Volume 42. [Google Scholar]
- Kalantar, B.; Mansor, S.B.; Shafri, H.Z.M.; Halin, A.A. Integration of template matching and object-based image analysis for semi-Automatic oil palm tree counting in UAV images. In Proceedings of the 37th Asian Conference on Remote Sensing, ACRS, Colombo, Sri Lanka, 17–21 October 2016; Volume 3. [Google Scholar]
- Colomina, I.; Blázquez, M.; Molina, P.; Parés, M.E.; Wis, M. Towards a new paradigm for high-resolution low-cost photogrammetryand remote sensing. In Proceedings of the International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences, ISPRS Congress, Beijing, China, 3–11 July 2008; Volume 1, pp. 1201–1206. [Google Scholar]
- Nex, F.; Remondino, F. UAV for 3D mapping applications: A review. Appl. Geomat. 2014, 6, 1–15. [Google Scholar] [CrossRef]
- Peng, Z.-R.; Wang, D.; Wang, Z.; Gao, Y.; Lu, S. A study of vertical distribution patterns of PM2. 5 concentrations based on ambient monitoring with unmanned aerial vehicles: A case in Hangzhou, China. Atmos. Environ. 2015, 123, 357–369. [Google Scholar]
- Jumaah, H.J.; Mansor, S.; Pradhan, B.; Adam, S.N. UAV-based PM2.5 monitoring for small-scale urban areas. Int. J. Geoinf. 2018, 14, 61–69. [Google Scholar]
- Caillouet, C.; Giroire, F.; Razafindralambo, T. Optimization of mobile sensor coverage with UAVs. In Proceedings of the IEEE INFOCOM 2018-IEEE Conference on Computer Communications Workshops (INFOCOM WKSHPS), Honolulu, HI, USA, 15–19 April 2018; pp. 622–627. [Google Scholar]
- Cichowicz, R.; Dobrzański, M. Spatial Analysis (Measurements at Heights of 10 m and 20 m above Ground Level) of the Concentrations of Particulate Matter (PM10, PM2. 5, and PM1. 0) and Gaseous Pollutants (H2S) on the University Campus: A Case Study. Atmosphere 2021, 12, 62. [Google Scholar] [CrossRef]
- Unit Golf Universiti Putra Malaysia Climate History. Available online: http://www.myweather2.com/City-Town/Malaysia/Unit-Golf-Universiti-Putra-Malaysia/climate-profile.aspx?month=7 (accessed on 12 July 2021).
- Cheong, Y.L.; Burkart, K.; Leitão, P.J.; Lakes, T. Assessing weather effects on dengue disease in Malaysia. Int. J. Environ. Res. Public Health 2013, 10, 6319–6334. [Google Scholar] [CrossRef] [PubMed]
- Offenhuber, D.; Schechtner, K. Accountability Technologies: Tools for Asking Hard Questions; Offenhuber, D., Schechtner, K., Eds.; Springer: Berlin/Heidelberg, Germany, 2013; ISBN 3709114748. [Google Scholar]
- Particle/Dust Sensor Module DSM 501 Series. 2012. Available online: https://www.elektronik.ropla.eu/pdf/stock/smy/dsm501.pdf (accessed on 12 July 2021).
- Zhou, Y.; Zhou, Q.; Kong, Q.; Cai, W. Wireless temperature & humidity monitor and control system. In Proceedings of the 2012 2nd International Conference on Consumer Electronics, Communications and Networks (CECNet), Three Gorges, China, 21–23 April 2012; pp. 2246–2250. [Google Scholar]
- Du, Y.; Liu, C.; Wu, D.; Jiang, S. Measurement of international roughness index by using-axis accelerometers and GPS. Math. Probl. Eng. 2014, 2014. [Google Scholar] [CrossRef] [Green Version]
- Bäumker, M.; Przybilla, H.J.; Zurhorst, A. Enhancements in UAV flight control and sensor orientation. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2013, 40, 33–38. [Google Scholar] [CrossRef] [Green Version]
- Ruslan, N. Air Polution Index (API) Real Time Monitoring System. Ph.D. Dissertation, Universiti Tun Hussein Onn Malaysia, Johor, Malaysia, January 2015. [Google Scholar]



Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jumaah, H.J.; Kalantar, B.; Halin, A.A.; Mansor, S.; Ueda, N.; Jumaah, S.J. Development of UAV-Based PM2.5 Monitoring System. Drones 2021, 5, 60. https://doi.org/10.3390/drones5030060
Jumaah HJ, Kalantar B, Halin AA, Mansor S, Ueda N, Jumaah SJ. Development of UAV-Based PM2.5 Monitoring System. Drones. 2021; 5(3):60. https://doi.org/10.3390/drones5030060
Chicago/Turabian StyleJumaah, Huda Jamal, Bahareh Kalantar, Alfian Abdul Halin, Shattri Mansor, Naonori Ueda, and Sarah Jamal Jumaah. 2021. "Development of UAV-Based PM2.5 Monitoring System" Drones 5, no. 3: 60. https://doi.org/10.3390/drones5030060
APA StyleJumaah, H. J., Kalantar, B., Halin, A. A., Mansor, S., Ueda, N., & Jumaah, S. J. (2021). Development of UAV-Based PM2.5 Monitoring System. Drones, 5(3), 60. https://doi.org/10.3390/drones5030060