Development and Testing of a Low-Cost Instrumentation Platform for Fixed-Wing UAV Performance Analysis



Abstract
:1. Introduction
2. Related Works
3. Project Requirements’ Specification
4. Materials and Methods
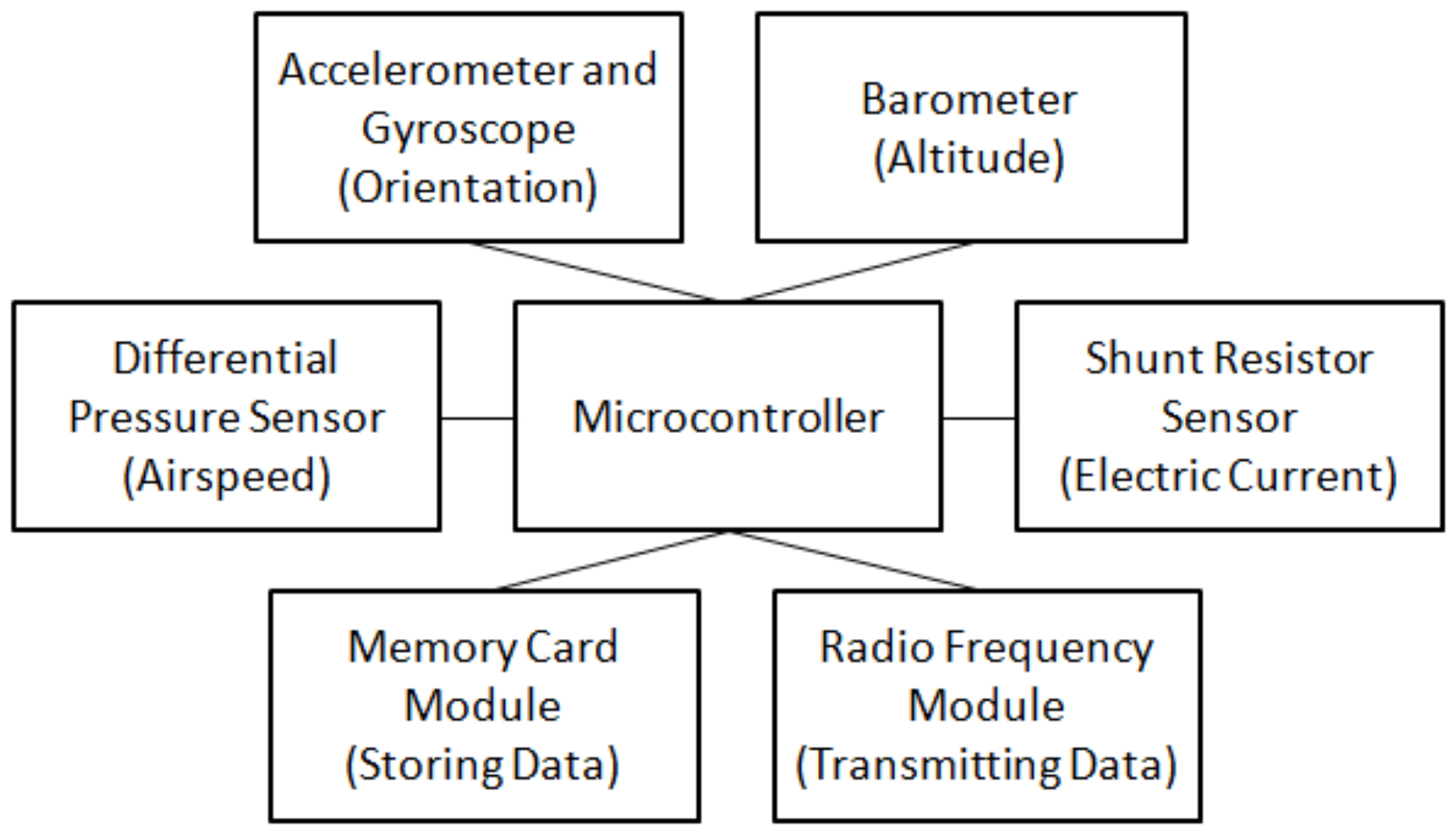
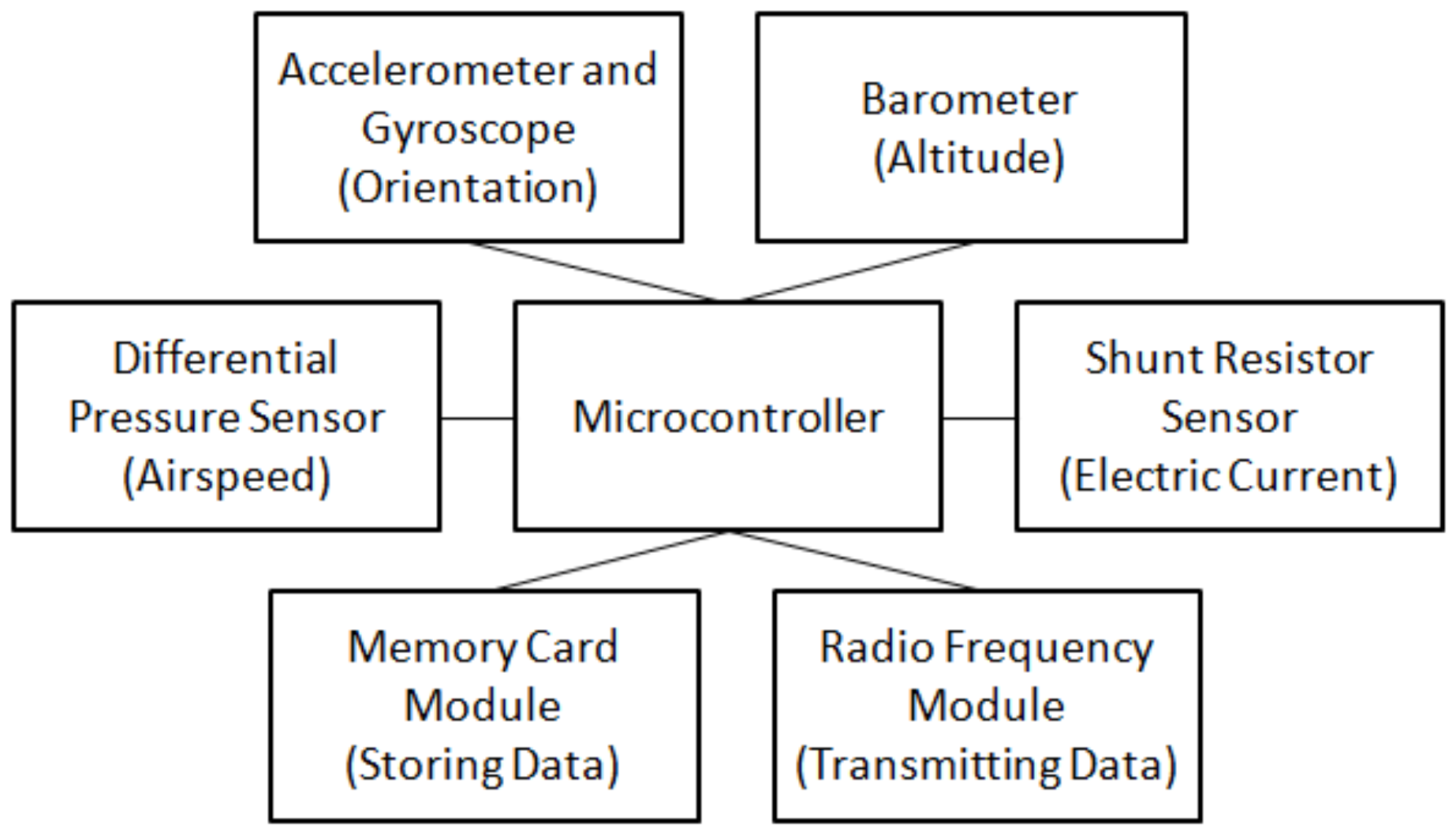
4.1. Microcontroller
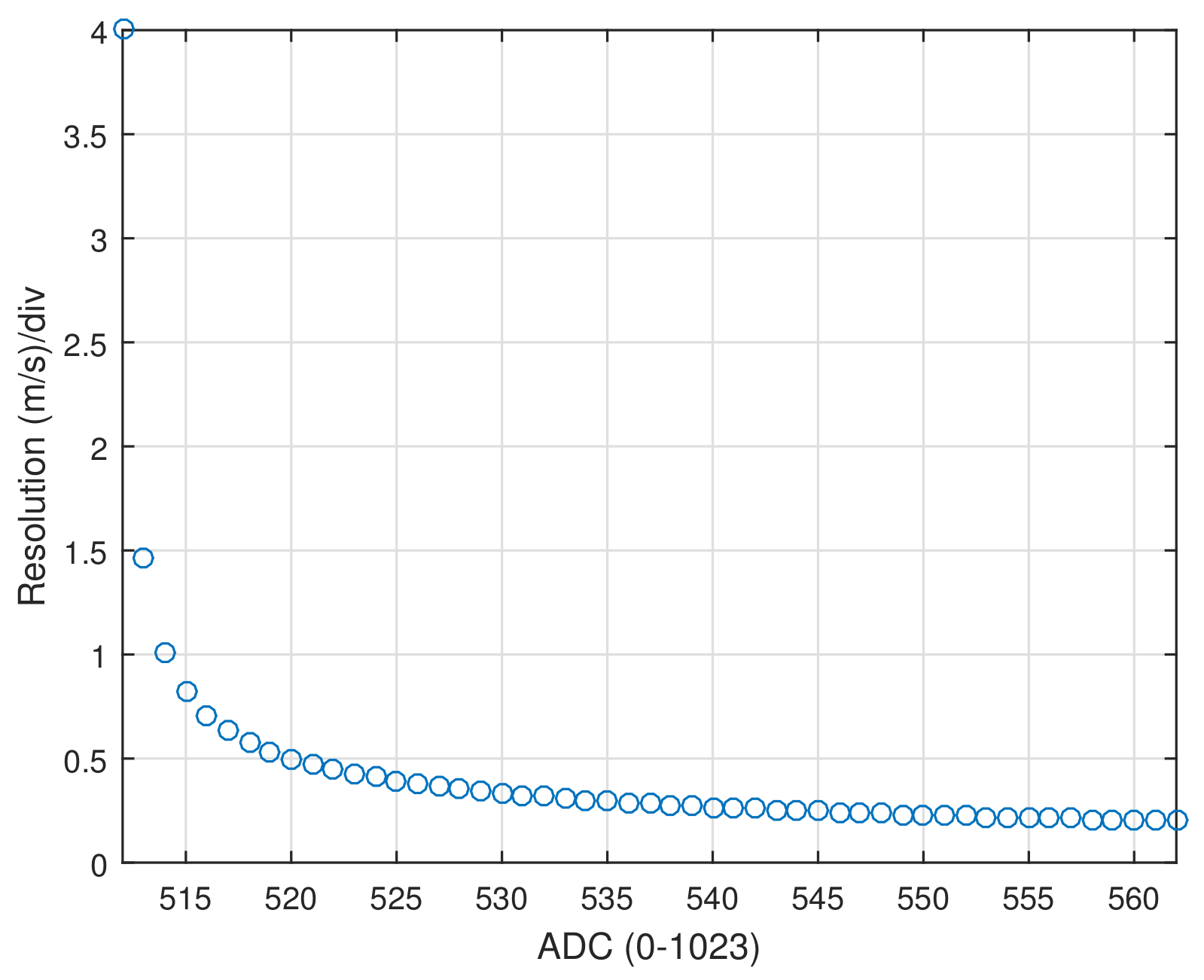
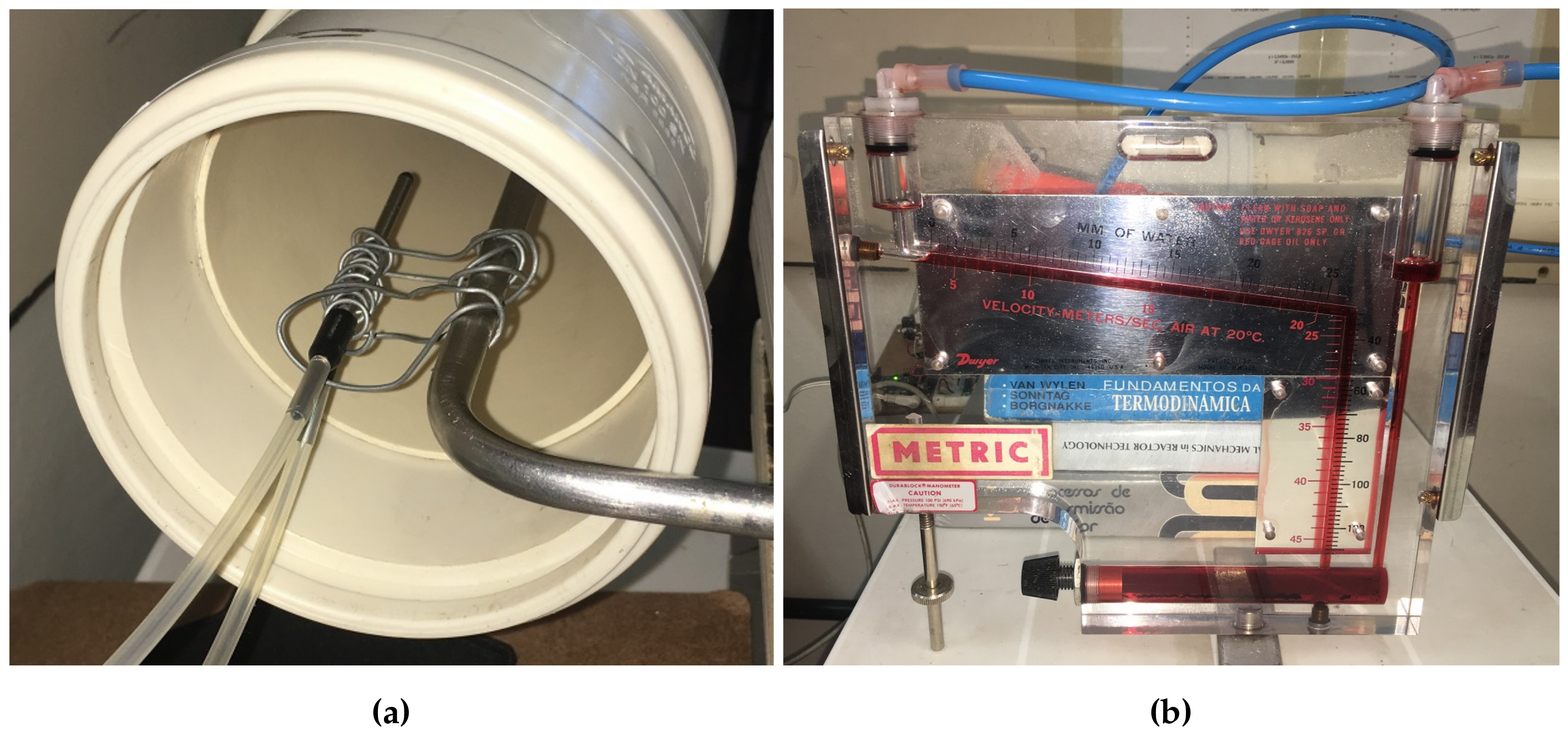
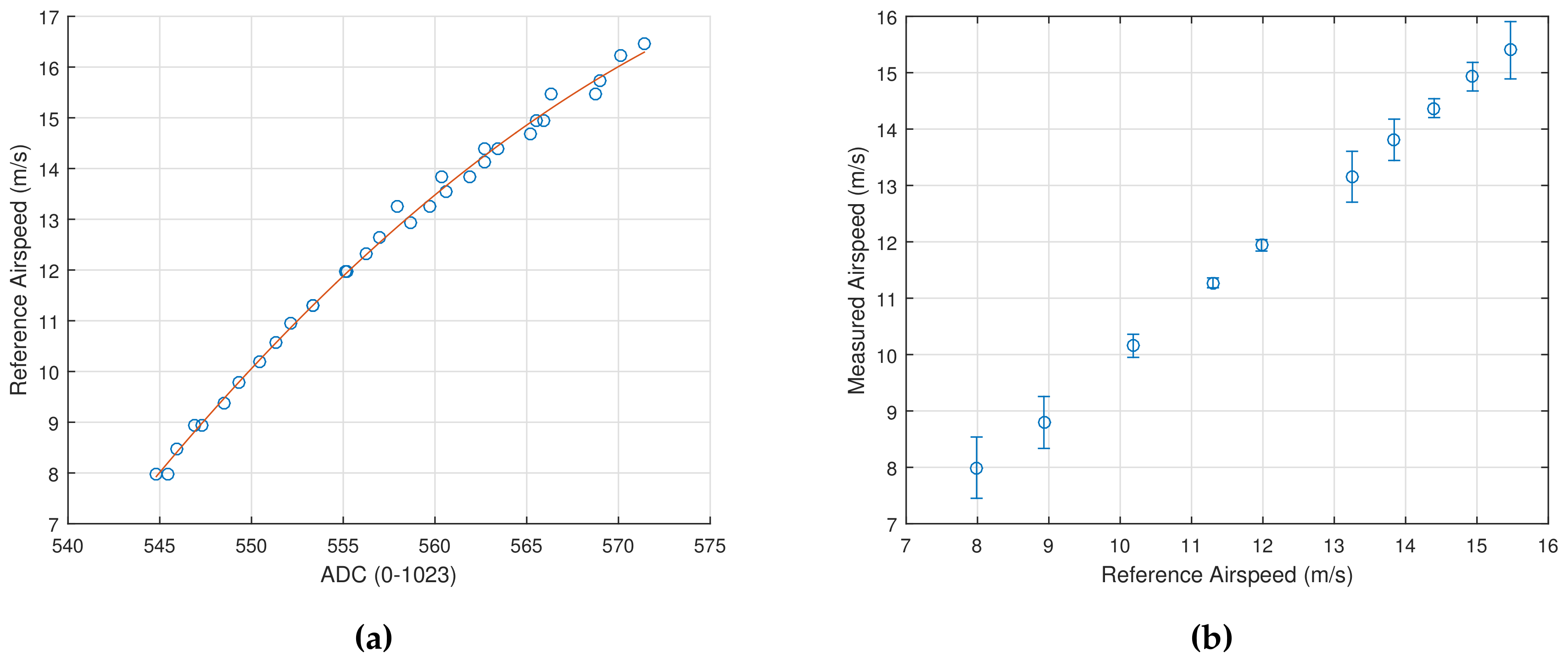
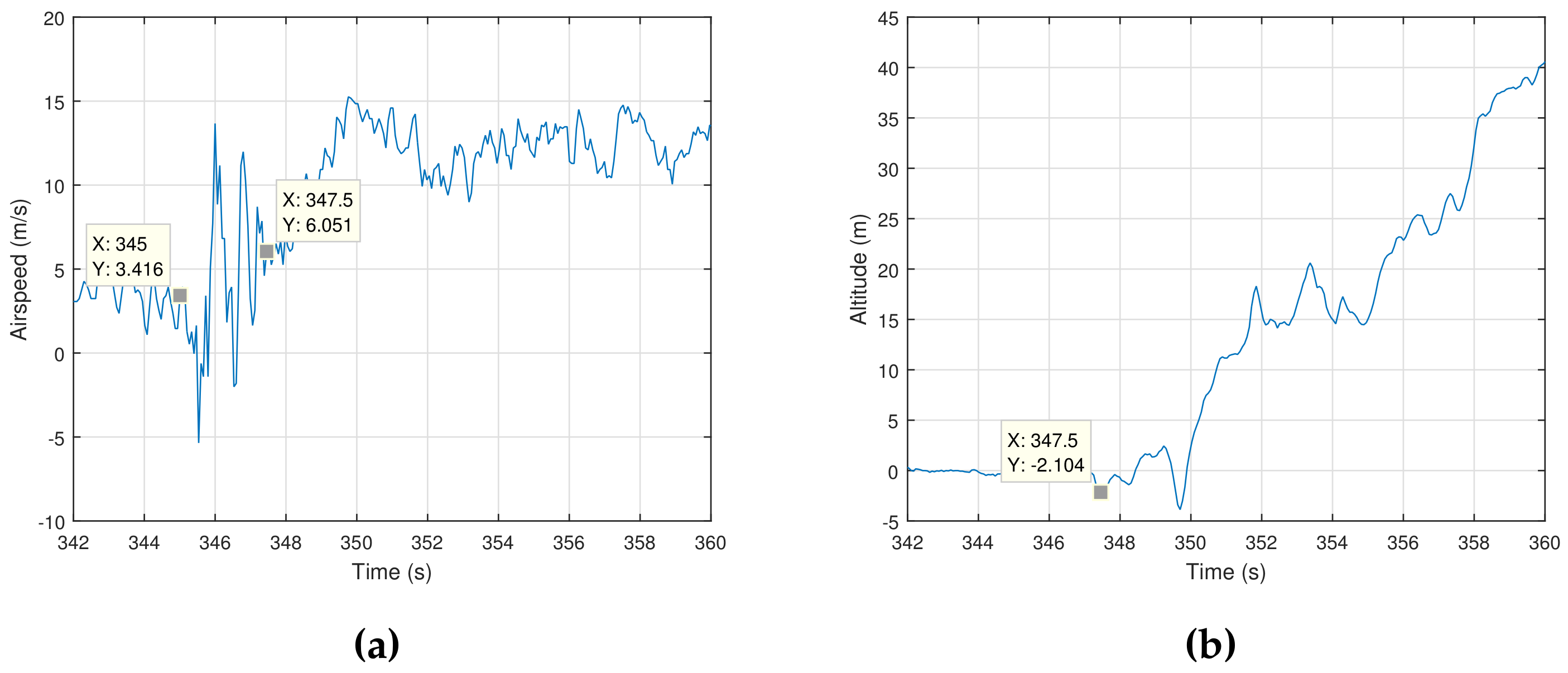
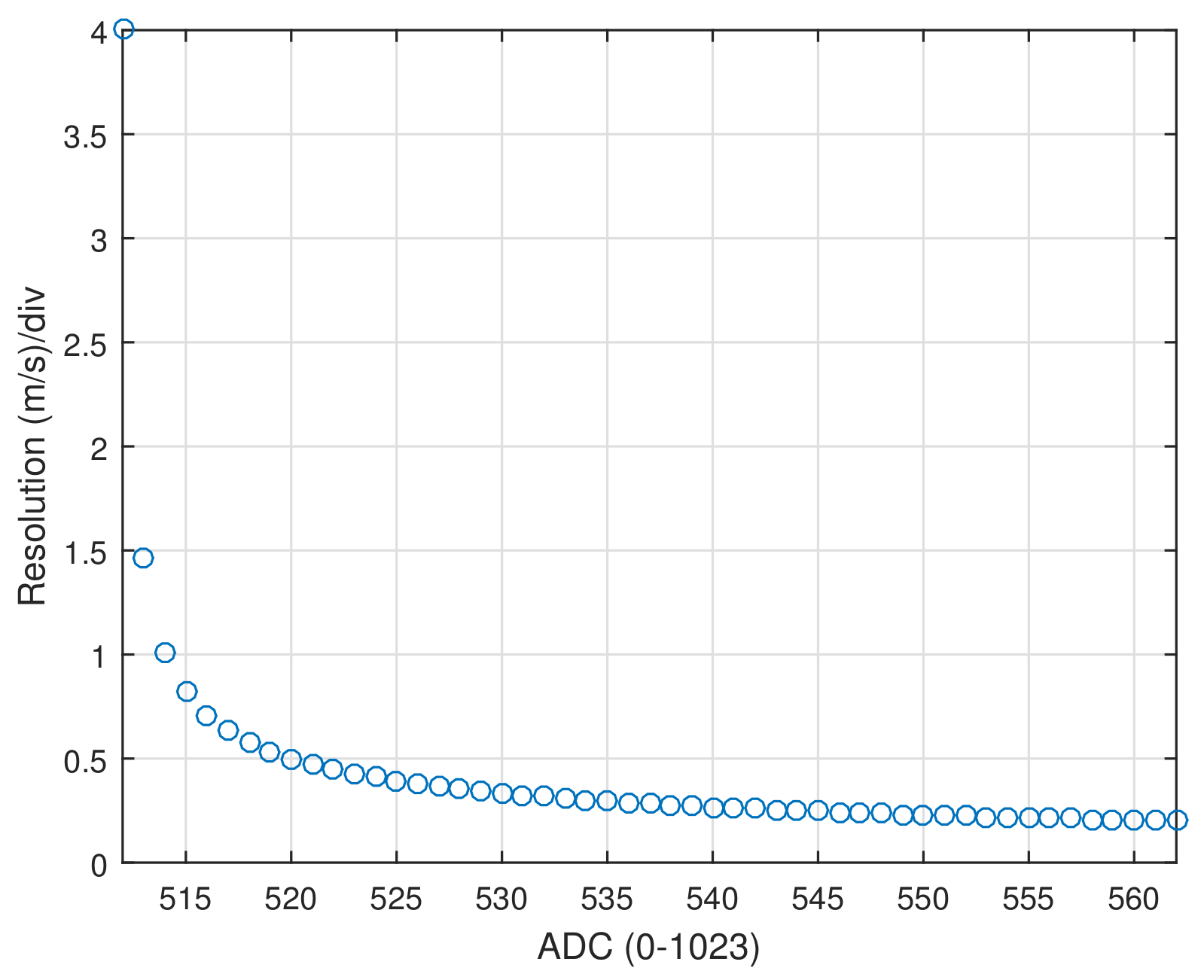
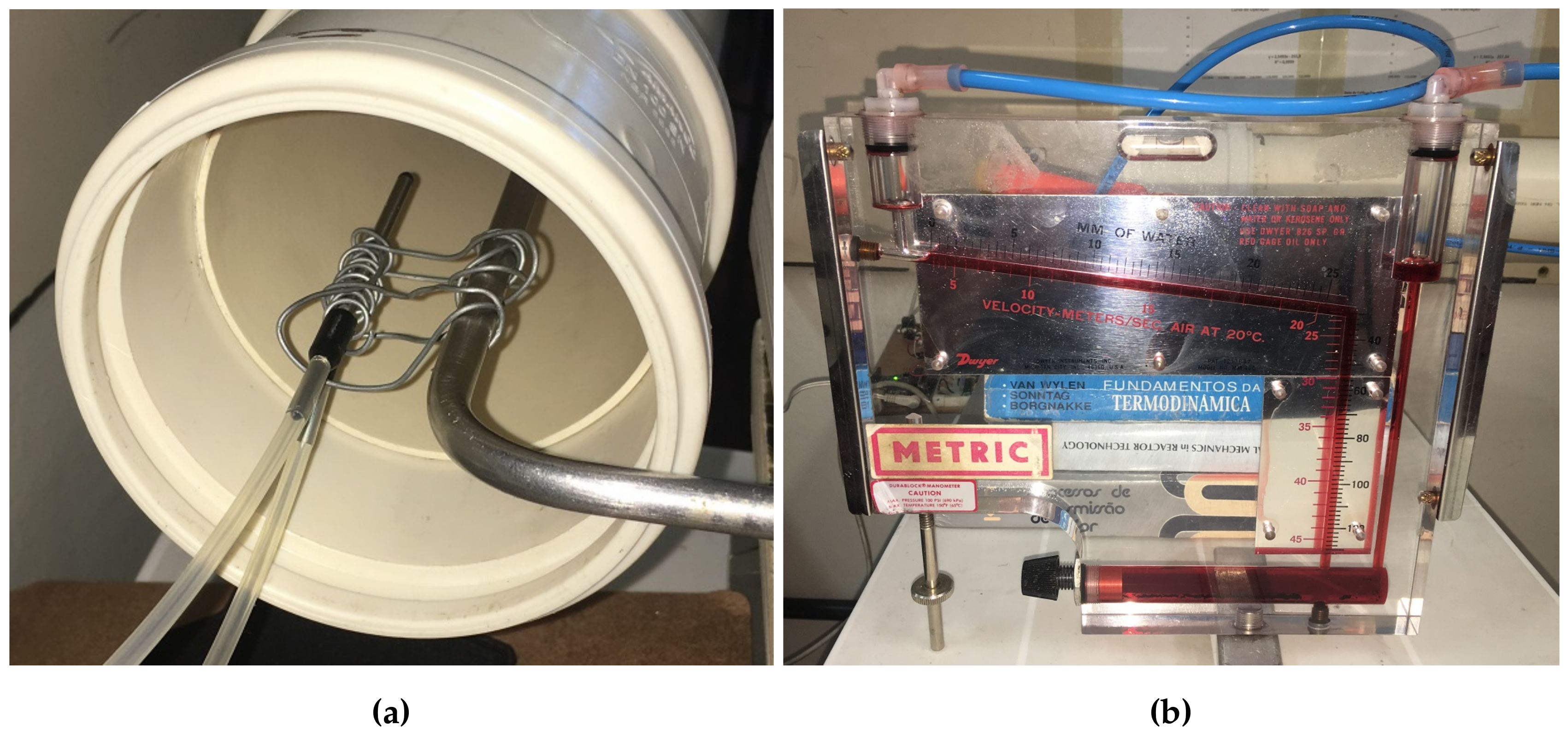
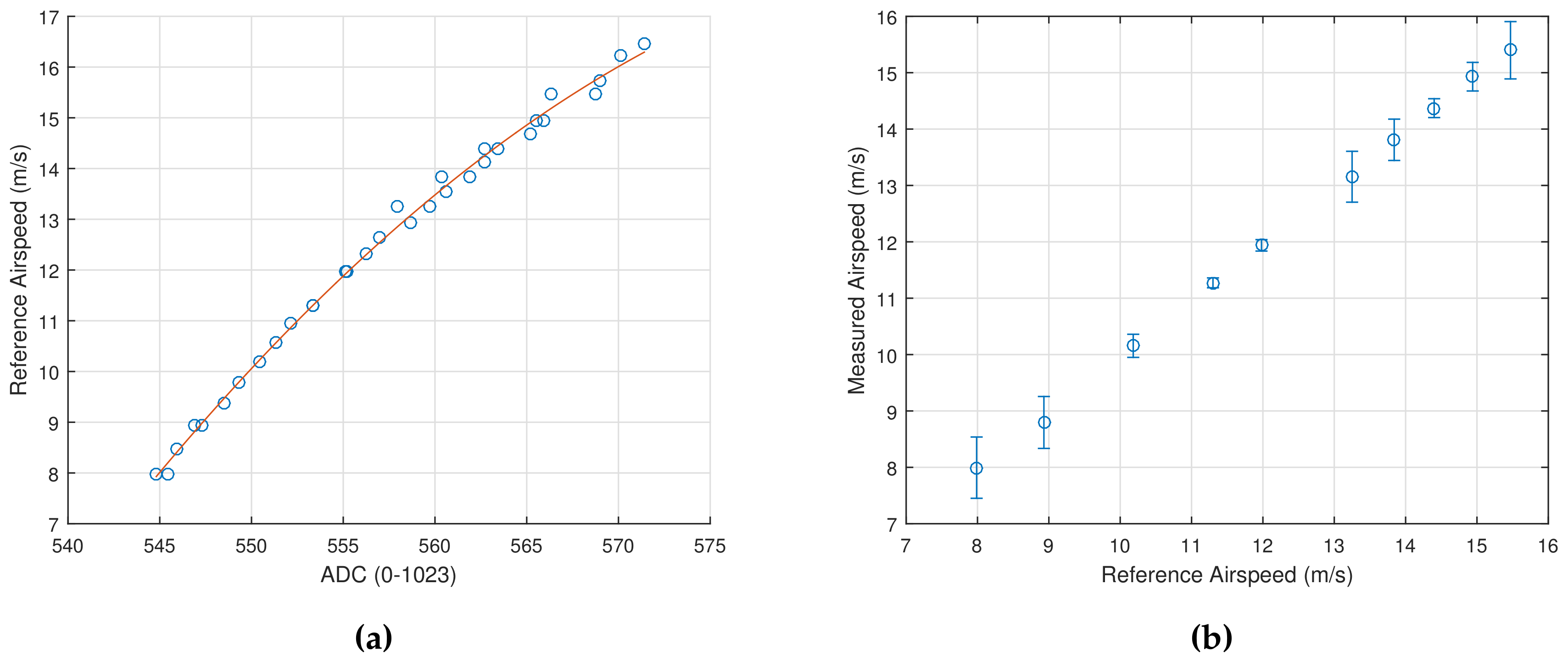
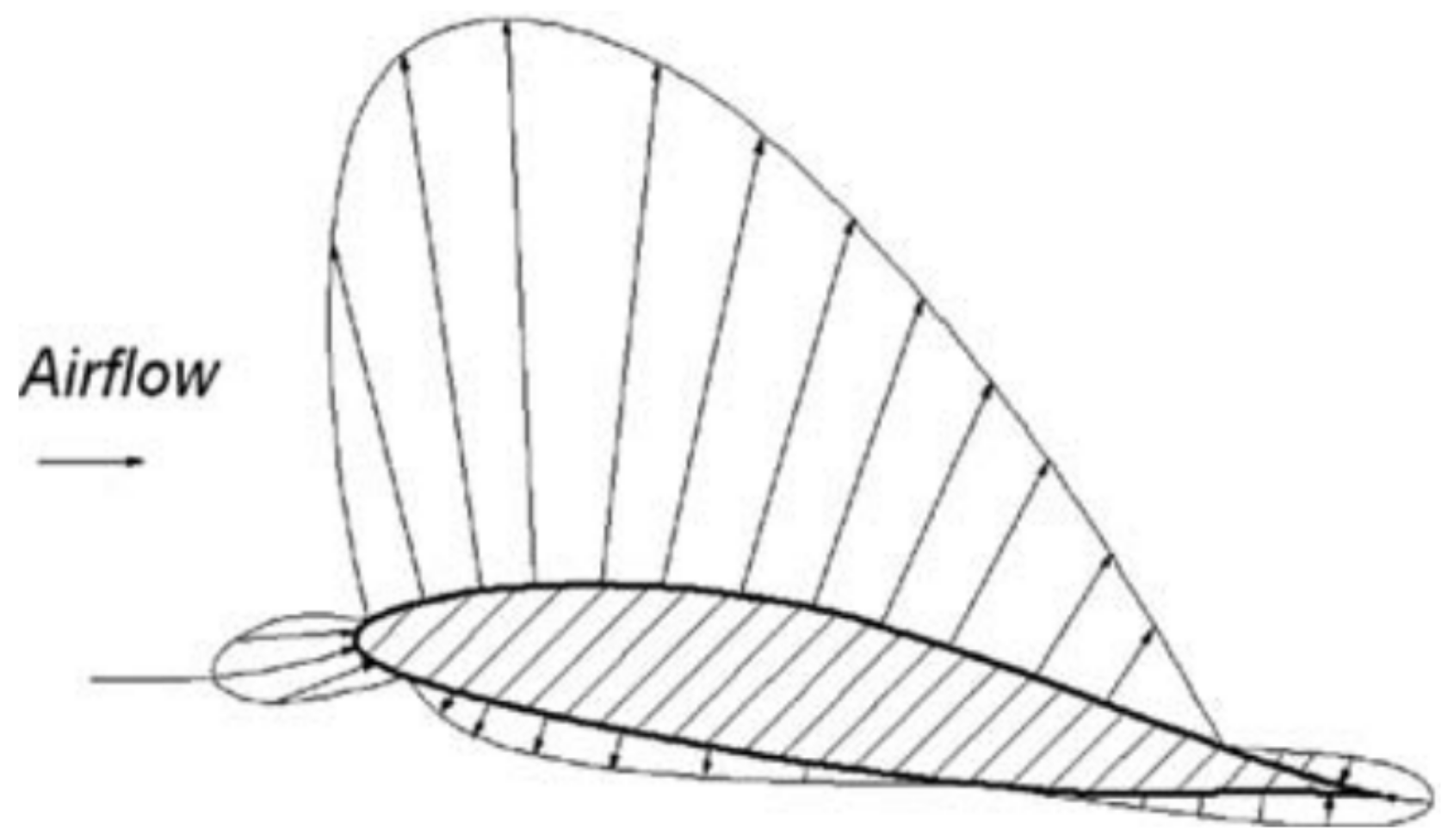
4.2. Airspeed
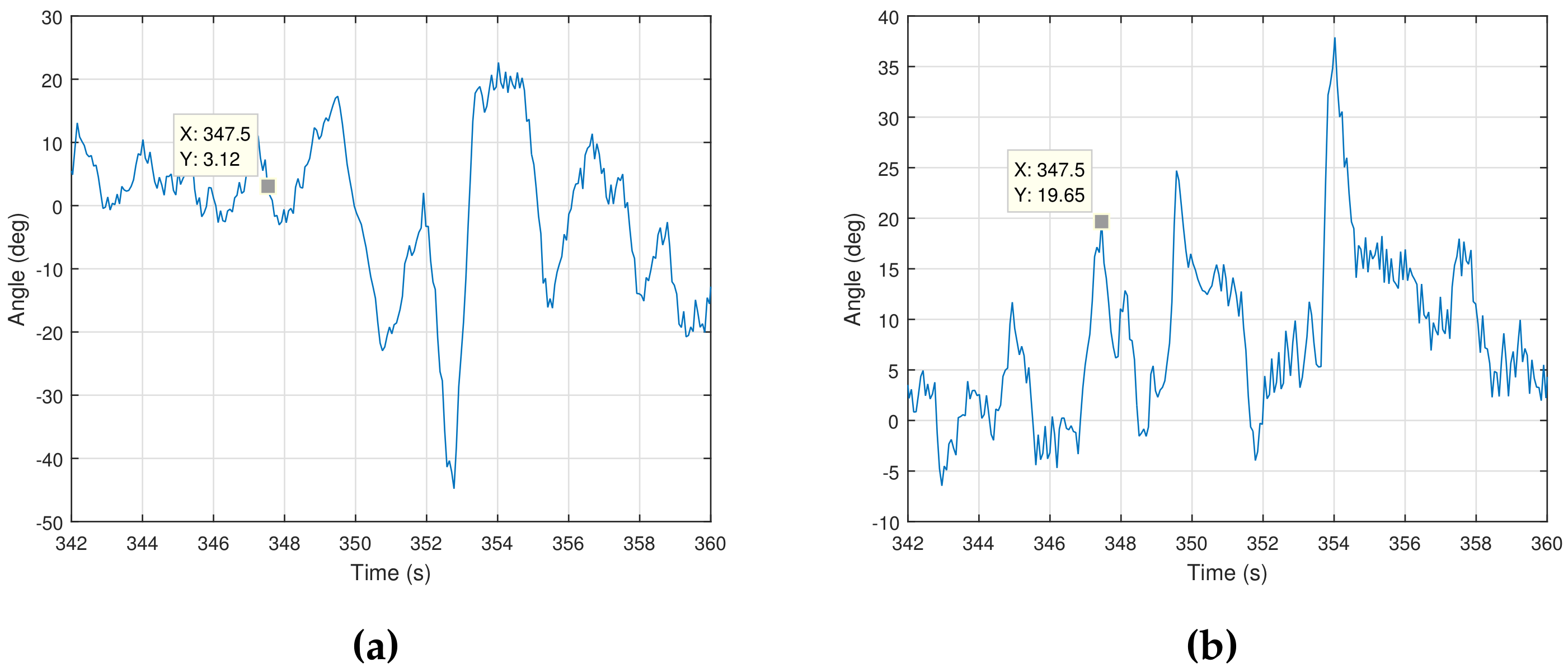
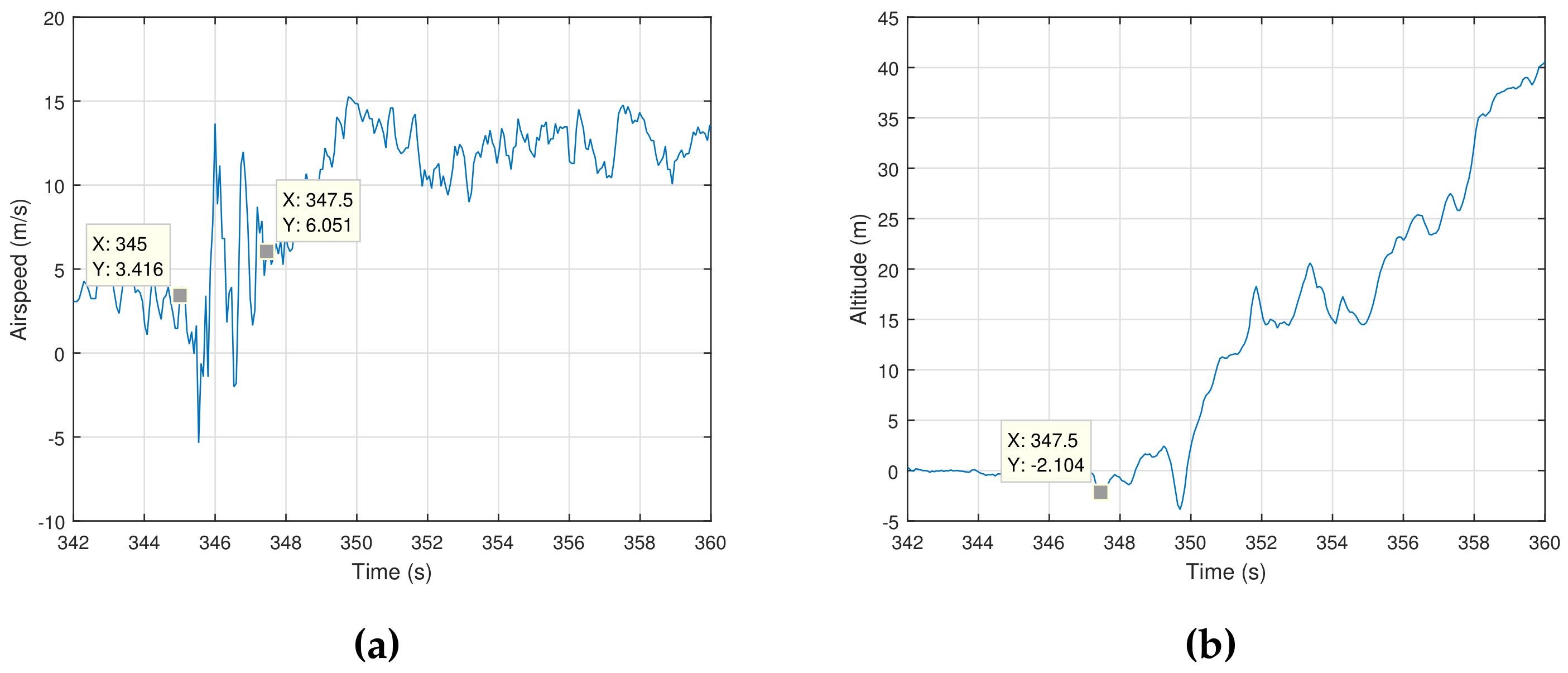
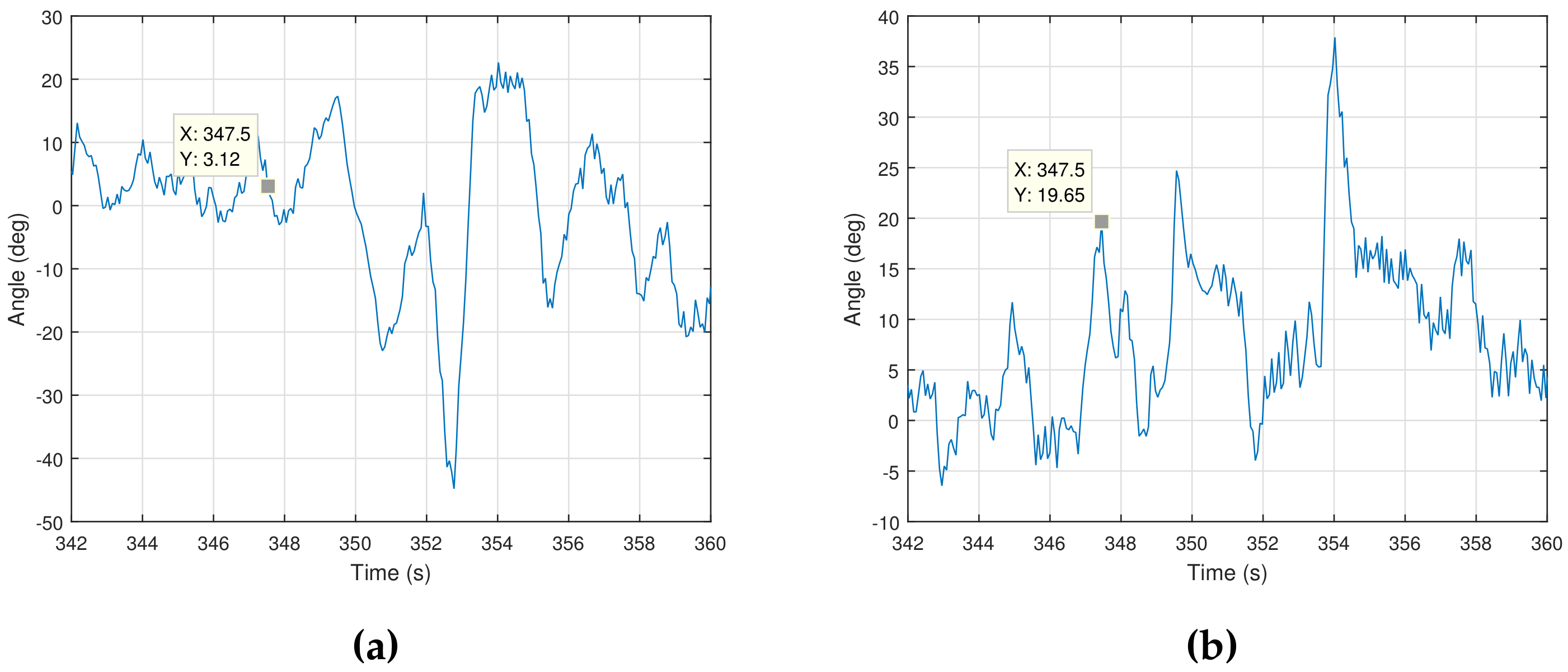
4.3. Orientation and Altitude
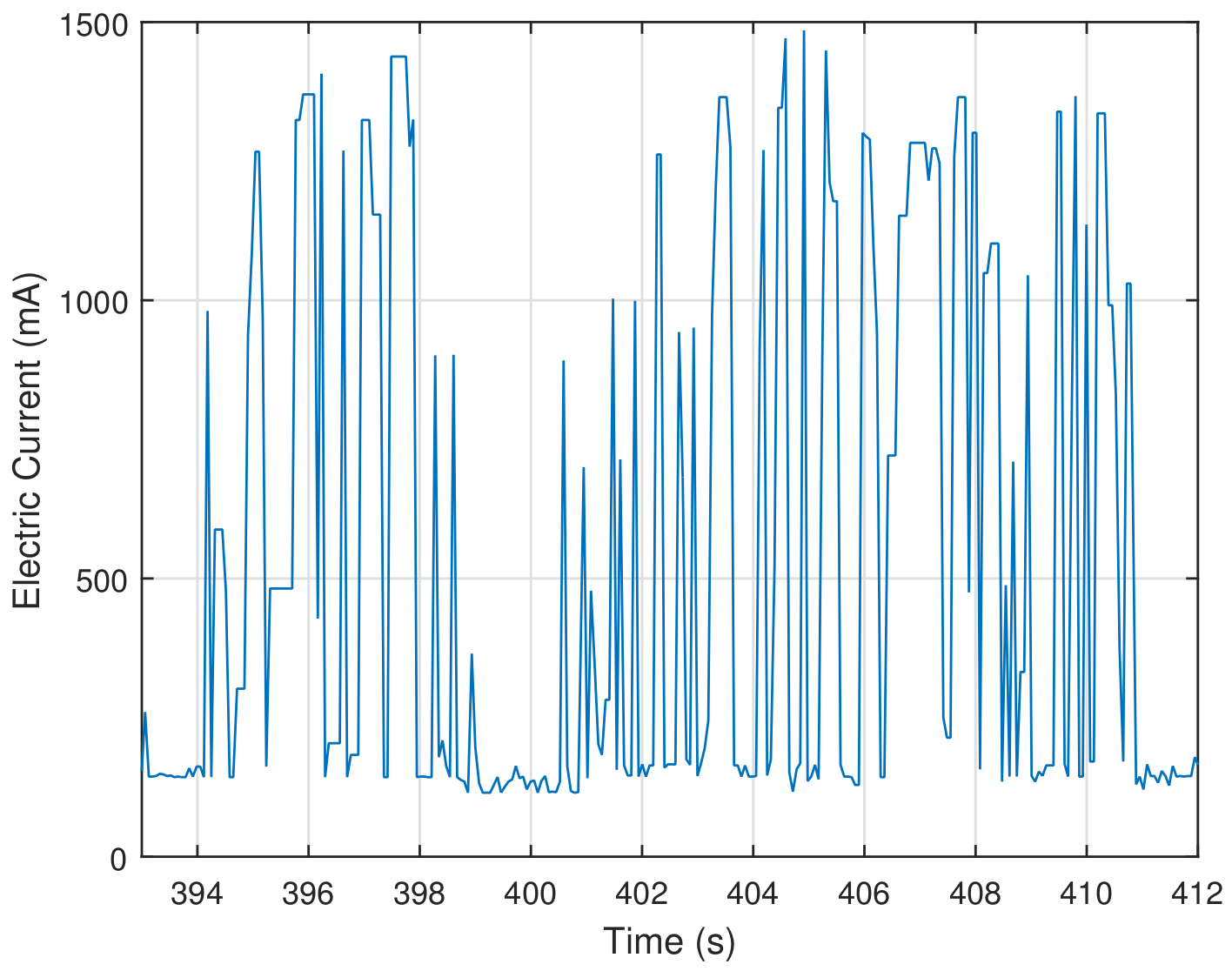
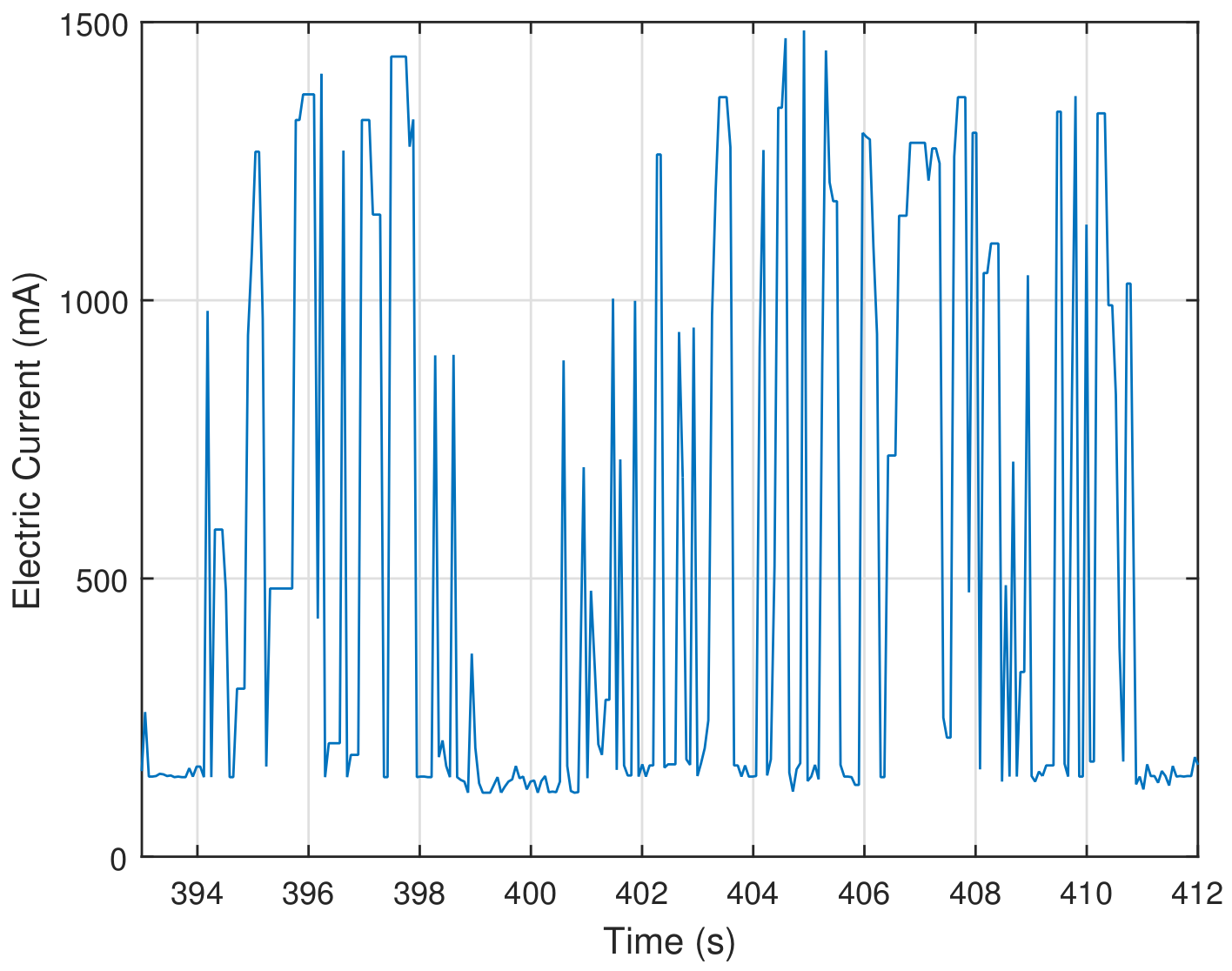
4.4. Electric Current
4.5. Radio Frequency Module
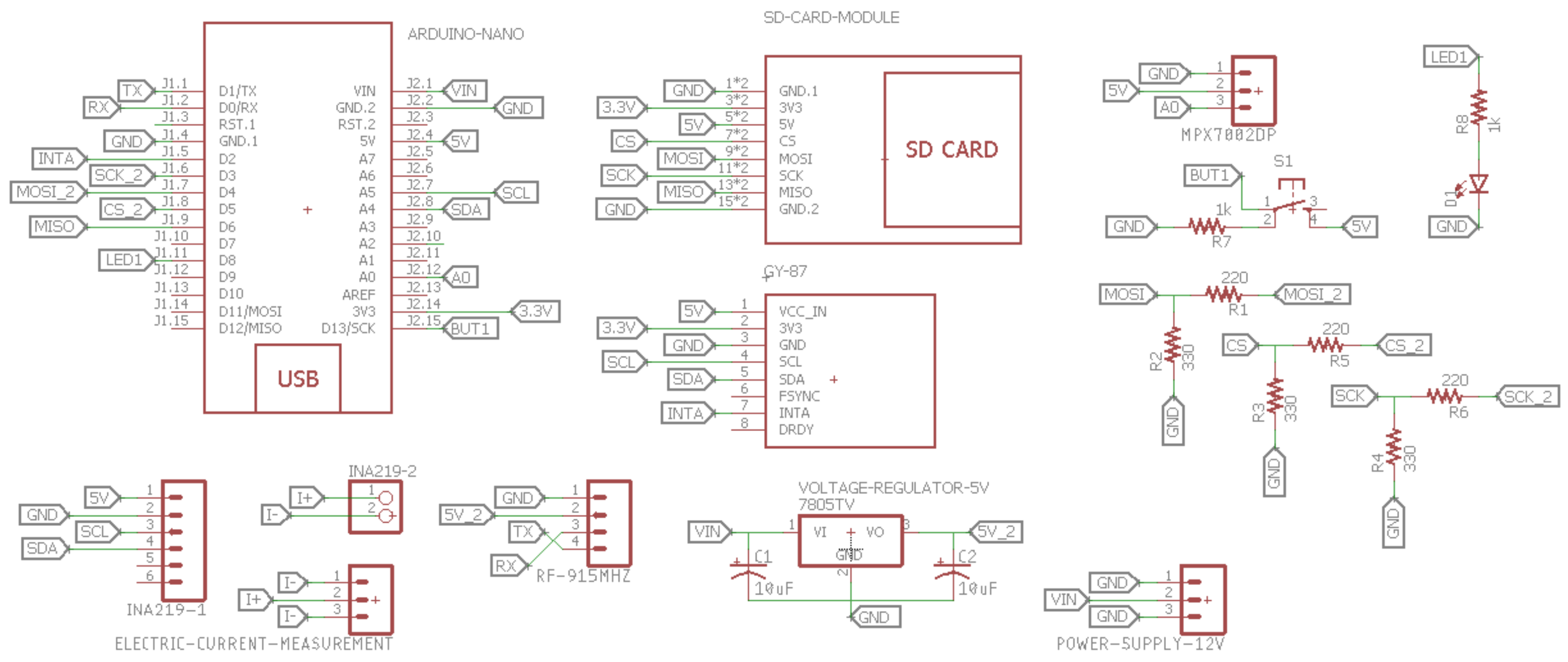
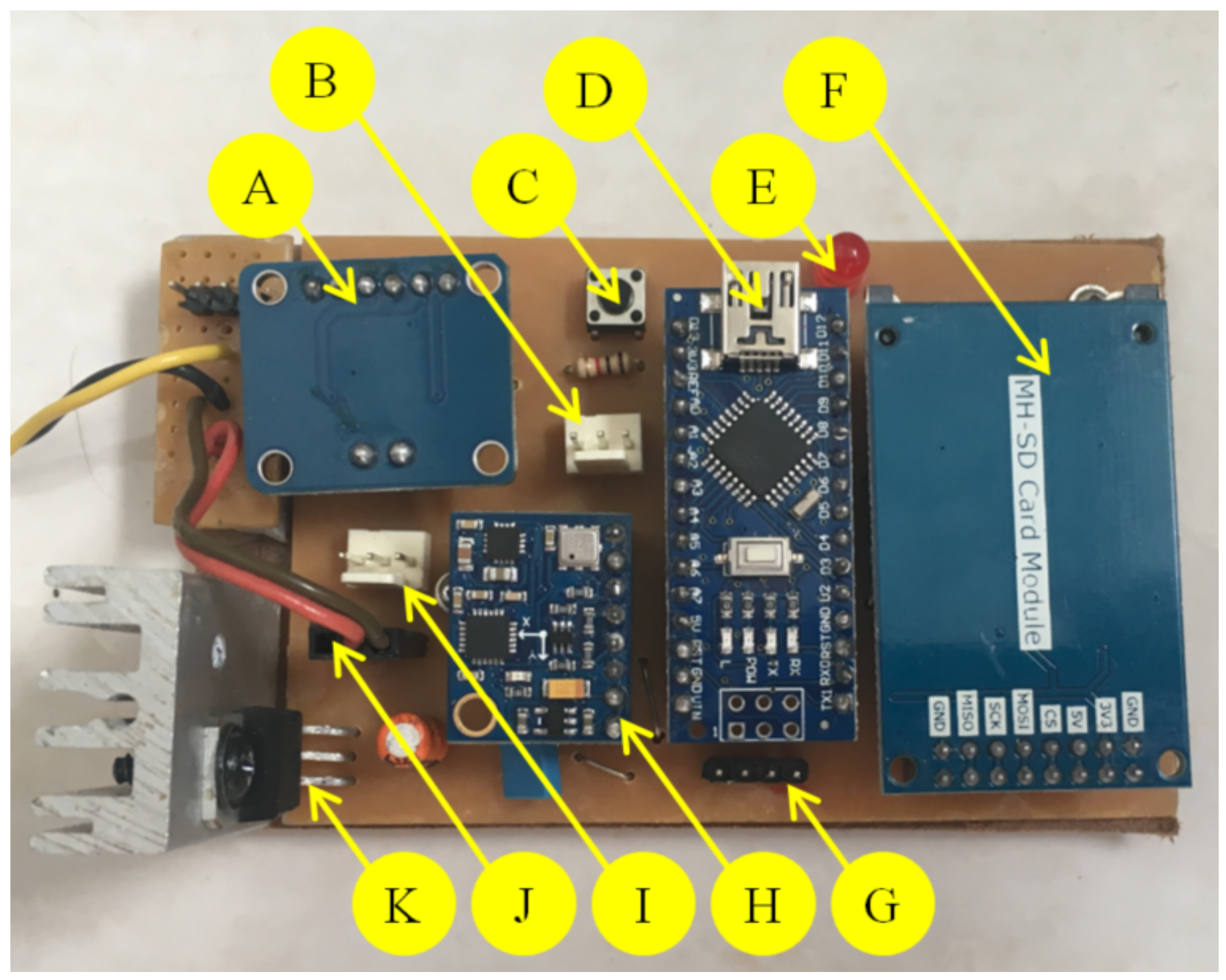
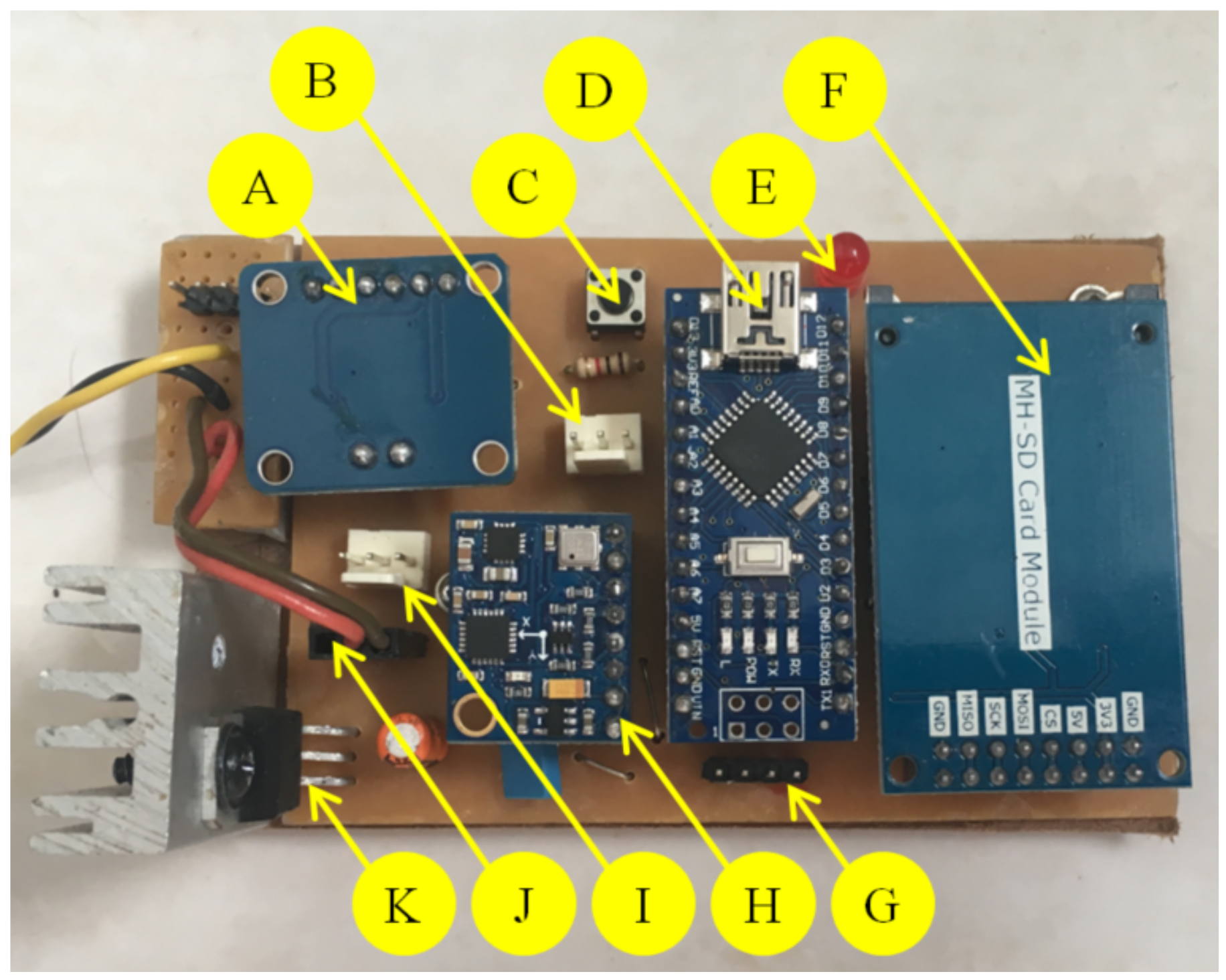
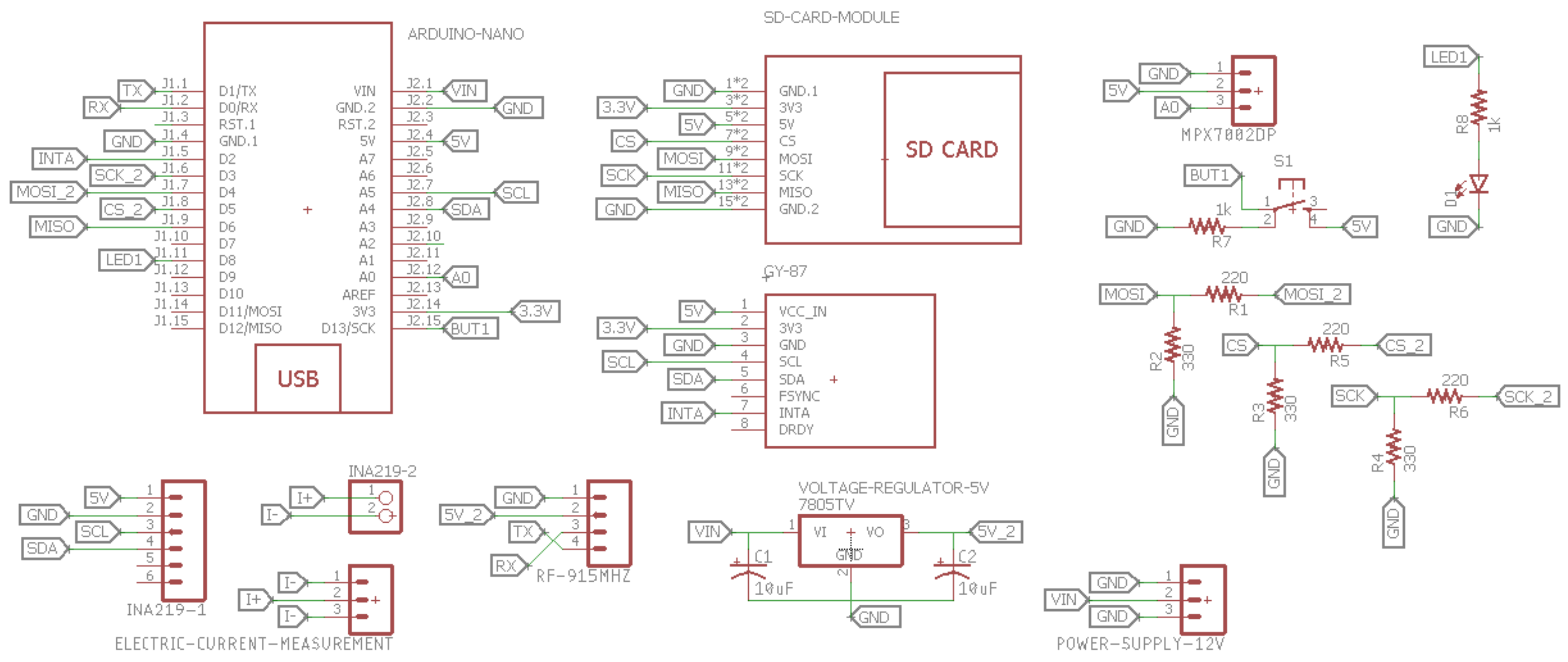
4.6. Data Acquisition Board
4.7. Communication Protocol
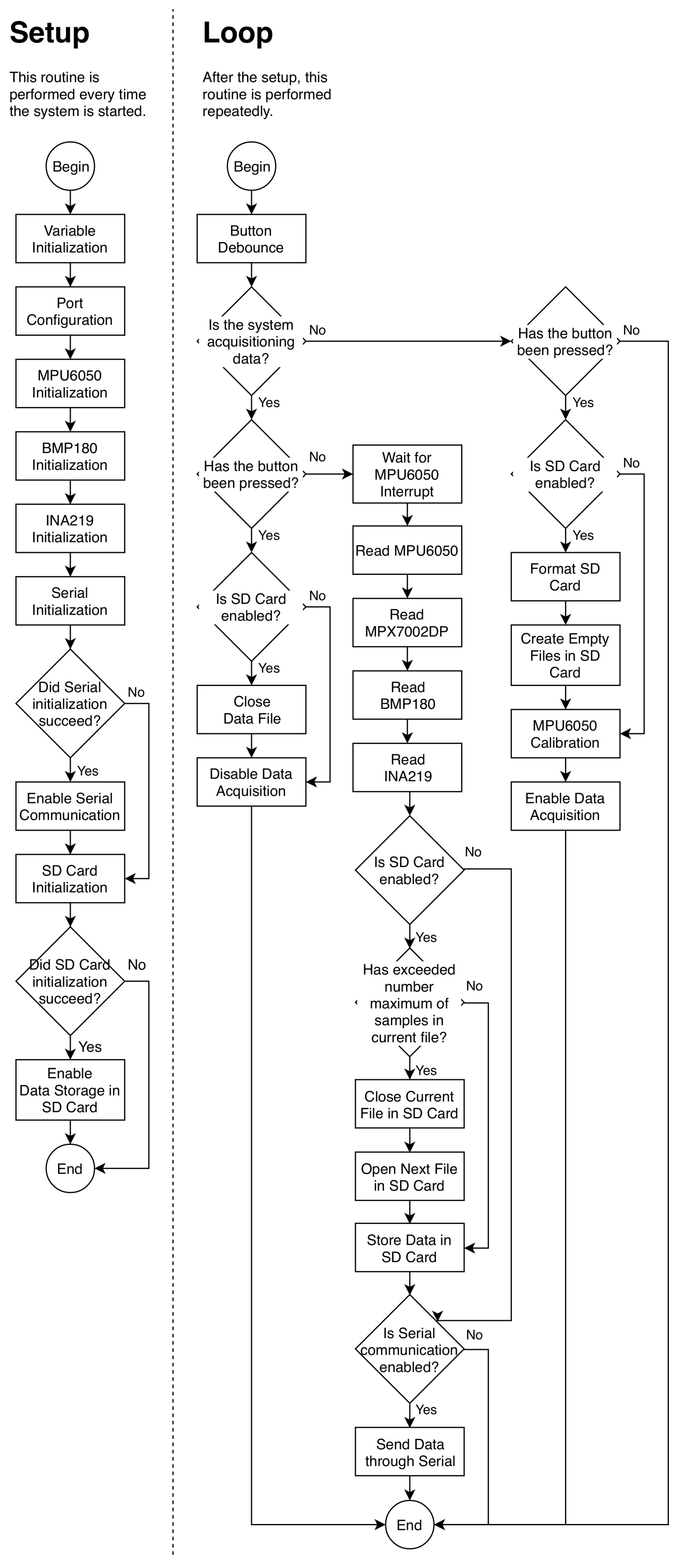
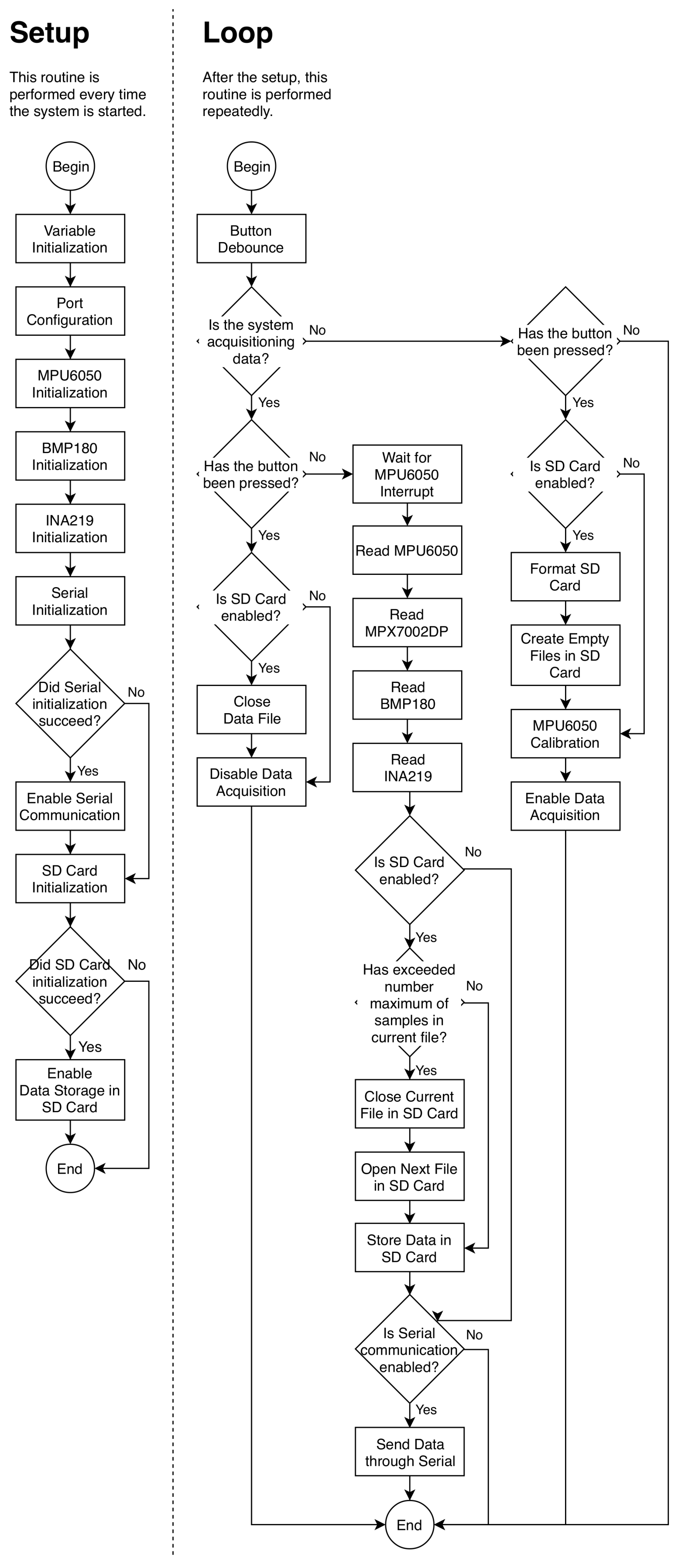
4.8. Data Acquisition Firmware
4.9. Installing the Components in a Fixed-Wing UAV
5. Results and Discussion
6. Conclusions
Author Contributions
Acknowledgments
Conflicts of Interest
Abbreviations
| ADC | Analog-to-digital converter |
| FHSS | Frequency-Hopping Spread Spectrum |
| I2C | Inter-Integrated Circuit |
| IC | Integrated Circuit |
| ISM | Industrial, Scientific and Medical |
| MDPI | Multidisciplinary Digital Publishing Institute |
| MISO | Master Input Slave Output |
| MOSI | Master Output Slave Input |
| SCL | Serial Clock |
| SDA | Serial Data |
| SPI | Serial Peripheral Interface |
| SS | Slave Select |
| UART | Universal Asynchronous Receiver-Transmitter |
| UAV | Unmanned aerial vehicle |
Appendix A
References
- Kundu, A.K. Aircraft Design. In Aircraft Design; Shyy, W., Rycroft, M.J., Eds.; Cambridge University Press: New York, NY, USA, 2010; p. i. [Google Scholar]
- Stoliker, F.N. Pre-Flight Tests. In Introduction to Flight Test Engineering; RTO/NATO: Neuilly-sur-Seine, France, 2005; Volume 14, p. 5. [Google Scholar]
- International, S. SAE for Students. Available online: https://www.sae.org/students/ (accessed on 11 March 2018).
- Roskam, J.; Lan, C.T.E. Maneuvering and the Flight Envelope. In Airplane Aerodynamics and Performance; DARcorporation: Lawrence, KS, USA, 1997; pp. 581–585. [Google Scholar]
- Ojha, S.K. Altitudes, Airspeeds, and Wind Speeds. In Flight Performance of Aircraft; Przemieniecki, J.S., Ed.; American Institute of Aeronautics and Astronautics: Washington, DC, USA, 1995; pp. 175–185. [Google Scholar]
- Kish, B.A.; Rhoney, M.; Kimberlin, R.D.; Vuckovic, K.; Attarian, E. Wing Bug: A portable, low-cost flight test instrumentation system. In Proceedings of the 2017 IEEE Aerospace Conference, Big Sky, MT, USA, 4–11 March 2017; pp. 1–8. [Google Scholar]
- Kügler, M.E.; Holzapfel, F. Designing a safe and robust automatic take-off maneuver for a fixed-wing UAV. In Proceedings of the 2016 14th International Conference on Control, Automation, Robotics and Vision (ICARCV), Phuket, Thailand, 13–15 November 2016; pp. 1–6. [Google Scholar]
- Lesprier, J.; Biannic, J.M.; Roos, C. Modeling and robust nonlinear control of a fixed-wing UAV. In Proceedings of the 2015 IEEE Conference on Control Applications (CCA), Sydney, Australia, 21–23 September 2015; pp. 1334–1339. [Google Scholar]
- Bryson, M.; Sukkarieh, S. A comparison of feature and pose-based mapping using vision, inertial and GPS on a UAV. In Proceedings of the 2011 IEEE/RSJ International Conference on Intelligent Robots and Systems, San Francisco, CA, USA, 25–30 September 2011; pp. 4256–4262. [Google Scholar]
- Rodriguez, A.L.; Parrilla, L.M.; Simon-Muela, A.; Prats, M.M.; Querejeta, C.; de Blanes, F.G. Real time sensor acquisition platform for experimental UAV research. In Proceedings of the Digital Avionics Systems Conference, Orlando, FL, USA, 23–29 October 2009; pp. 5.C.5-1–5.C.5-10. [Google Scholar]
- Schmitz, G.; Alves, T.; Henriques, R.; Freitas, E.; El’Youssef, E. A simplified approach to motion estimation in a UAV using two filters. IFAC PapersOnLine 2016, 49, 325–330. [Google Scholar] [CrossRef]
- Goncalves, E.S.; Rosa, P.F.F. Sensor fusion with cointegration analysis for IMU in a simulated fixed-wing UAV. In Proceedings of the 2017 International Conference on Military Technologies (ICMT), Brno, Czech Republic, 31 May–2 June 2017; pp. 493–499. [Google Scholar]
- Tang, H.; Shen, Z. An attitude estimate method for fixed-wing UAV s using MEMS/GPS data fusion. In Proceedings of the 2017 First International Conference on Electronics Instrumentation Information Systems (EIIS), Harbin, China, 3–5 June 2017; pp. 1–5. [Google Scholar]
- Marantos, P.; Koveos, Y.; Kyriakopoulos, K.J. UAV State Estimation Using Adaptive Complementary Filters. IEEE Trans. Control Syst. Technol. 2016, 24, 1214–1226. [Google Scholar] [CrossRef]
- Rowberg, J. MPU6050 Library Repository. Available online: https://github.com/jrowberg/i2cdevlib/tree/master/Arduino/MPU6050 (accessed on 25 August 2017).
- ArduPilot. SiK Library Repository. Available online: https://github.com/ArduPilot/SiK (accessed on 25 November 2017).
- Greiman, B. SdFat Library Repository. Available online: https://github.com/greiman/SdFat (accessed on 2 October 2017).
- Sminghub. BMP180 Library Repository. Available online: https://github.com/SmingHub/SmingRTOS/tree/master/sming/libraries/BMP180 (accessed on 10 May 2017).
- Adafruit. Adafruit-INA219 Library Repository. Available online: https://github.com/adafruit/AdafruitINA219 (accessed on 10 October 2017).



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| GY-80 | GY-87 | GY-91 | |
|---|---|---|---|
| Accelerometer | ADXL345 | MPU6050 | MPU6500 |
| Gyroscope | L3G4200D | MPU6050 | MPU6500 |
| Magnetometer | HMC5883L | HMC5883L | AK8963 |
| Barometer | BMP085 | BMP180 | BMP280 |
| Legend | Component |
|---|---|
| A | Electric Current Sensor (INA219) |
| B | Conector for Differential Pressure Sensor (MPX7002DP) |
| C | Auxiliar Button |
| D | Arduino Nano |
| E | Sinalization LED |
| F | SD Card Reader and Writter Module |
| G | Conector for Radio Frequence Module |
| H | Module GY-87 (BMP180 and MPU6050) |
| I | Conector for Measuring Electric Current |
| J | Conector for Power Supply |
| K | Voltage Regulator for Radio Frequency Module |
| Task | Time (s) |
|---|---|
| Readings of Pitch and Roll from MPU6050 | 784 |
| Readings of Differential Pressure from MPX7002DP | 116 |
| Readings of Absolute Pressure from BMP180 | 15,428 |
| Readings of Electric Current from INA219 | 2032 |
| Storing Data on a SD Card | 3032 |
| Transmitting Data through RF | 1744 |
| Creating a new file on a SD Card | 512,100 |
| Closing a file on a SD Card | 22,792 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Dapper e Silva, T.; Cabreira, V.; De Freitas, E.P. Development and Testing of a Low-Cost Instrumentation Platform for Fixed-Wing UAV Performance Analysis. Drones 2018, 2, 19. https://doi.org/10.3390/drones2020019
Dapper e Silva T, Cabreira V, De Freitas EP. Development and Testing of a Low-Cost Instrumentation Platform for Fixed-Wing UAV Performance Analysis. Drones. 2018; 2(2):19. https://doi.org/10.3390/drones2020019
Chicago/Turabian StyleDapper e Silva, Tulio, Vinicius Cabreira, and Edison Pignaton De Freitas. 2018. "Development and Testing of a Low-Cost Instrumentation Platform for Fixed-Wing UAV Performance Analysis" Drones 2, no. 2: 19. https://doi.org/10.3390/drones2020019
APA StyleDapper e Silva, T., Cabreira, V., & De Freitas, E. P. (2018). Development and Testing of a Low-Cost Instrumentation Platform for Fixed-Wing UAV Performance Analysis. Drones, 2(2), 19. https://doi.org/10.3390/drones2020019