1. Introduction
Unmanned aerial vehicles (UAVs) are a rapidly advancing technology with many applications in the private, commercial, and government sectors. Currently, however, no safeguards exist to facilitate the safe operation of these devices in populated uncontrolled airspace without posing potential hazards to other manned or unmanned aircraft. Conventional anti-collision systems are only required for passenger aircraft greater than 5700 kg, and must be present on both to enable operation [
1]. Since autonomous UAVs do not meet these requirements and do not have the benefit of an onboard pilot, a non-cooperative system must be established to facilitate the detection and subsequent avoidance of other approaching aircraft. It is believed that acoustic sensing may be used to serve such a purpose.
Acoustic sensing is a passive technology that involves the detection of acoustic wave energy produced by some oscillating body. The most common form involves using sensors known as microphones that detect pressure fluctuations created during wave transmission. Acoustic sensing has many potential benefits over the more traditional non-cooperative technologies such as electro-optic (EO), infrared (IR), and radar. Since sensors are typically omnidirectional, complete spherical sensing coverage can be achieved. This is a very important feature as the bulk of midair collisions take place from behind, the side, above, or below; locations that would typically fall outside the field of view for most other sensing technologies [
2]. Sensing systems are typically very small and lightweight since they consist of only a few microphones and a data recording/processing unit. Data acquisition and processing requirements are also much less than that of EO or IR due to decreased sensor data rates. By simultaneously using a number of spatially separated microphones in an array configuration, the detection, localization, and tracking of an acoustic source such as an aircraft can be achieved [
3,
4,
5,
6,
7,
8]. In some instances, analyzing the Doppler-induced frequency shift of the source signal over a period of time may also allow one to determine the velocity and heading of the sound source [
8,
9,
10,
11,
12].
The general use of acoustic sensing to detect, localize, and track moving targets has been well studied and documented in the literature [
3,
4,
5,
6,
7,
8]. However, there have been very few accounts of using this technology for UAV sense-and-avoid (SAA) purposes. There have been no reports of air-to-air detection and localization of another aircraft from either a fixed-wing or rotary-wing UAV. Work in this area has involved either the detection of airborne UAVs from stationary platforms such as ground-based microphone arrays or tethered aerial balloons [
2,
10,
13,
14,
15,
16], simulating a UAV-based detection system [
2,
17,
18,
19], detecting ground-based impulse sources from fixed-wing UAVs, [
20,
21], or localizing continuous ground-based sources from stationary low-altitude rotary-wing UAVs [
22,
23].
Ferguson [
20] utilized a small UAV (Aerosonde) fitted with two microphones to detect and localize acoustic impulses from a propane cannon located on the ground. Detection distances of up to 300 m were said to have been achieved with a localization bearing angle error of 3°; although, evidence for these claims was not clearly presented. Robertson [
21] also conducted experiments where a ground-based propane cannon was detected and localized from a small UAV fitted with four microphones. Detection distances of up to 180 m were claimed with an average localization error of 8°. Ohata used a multirotor fitted with a large number of MEMS microphones to detect and localize an acoustic source located on the ground while hovering at altitudes less than 5 m [
22,
23]. Although a high localization accuracy was achieved, detection distances were far too low to constitute any form of practical anti-collision system. Scientific Applications and Research Associates Inc. (SARA) has developed a compact acoustic sensor system known as the Passive Acoustic Non-Cooperative Collision Alert System (PANCAS) for use on small UAVs [
24]. It has been integrated on a number of small gasoline-powered UAVs and supposedly obtained detection ranges of up to 2 km [
25]. However, there are currently no accounts published in the scientific literature regarding this technology to support this particular claim. One publication did, however, briefly indicate that the system was capable of detecting a shockwave emitted from a ground-based propane cannon from a distance of approximately 180 m via a fixed-wing UAV [
21]. Finally, Harvey showed that a ground-based loudspeaker emitting a 119 dBc audio recording of a small gasoline-powered UAV should be detectable at distances up to 1 km by a fixed-wing UAV fitted with four microphones [
26].
Although acoustic sensing is a relatively new idea in the context of collision avoidance technologies, it is evident that results obtained from studies conducted thus far appear promising. However, significant work is still required to fully evaluate the capabilities and limitations of the technology. Thus, the purpose of the following paper is to provide results from experiments conducted to further investigate the use of acoustic sensing as a collision avoidance technology. These results consist of determining the maximum distance at which a gasoline-powered fixed-wing UAV can be detected by an electric powered fixed-wing UAV fitted with microphones. It should be noted that details regarding localization and tracking of the intruding aircraft are not presented in the current paper due to the increased length that it would entail and will be presented in a future paper instead. In addition to experimental results, a method to enhance the detection of harmonic signals such as those generated by propeller-driven aircraft is also provided.
4. Results & Discussion
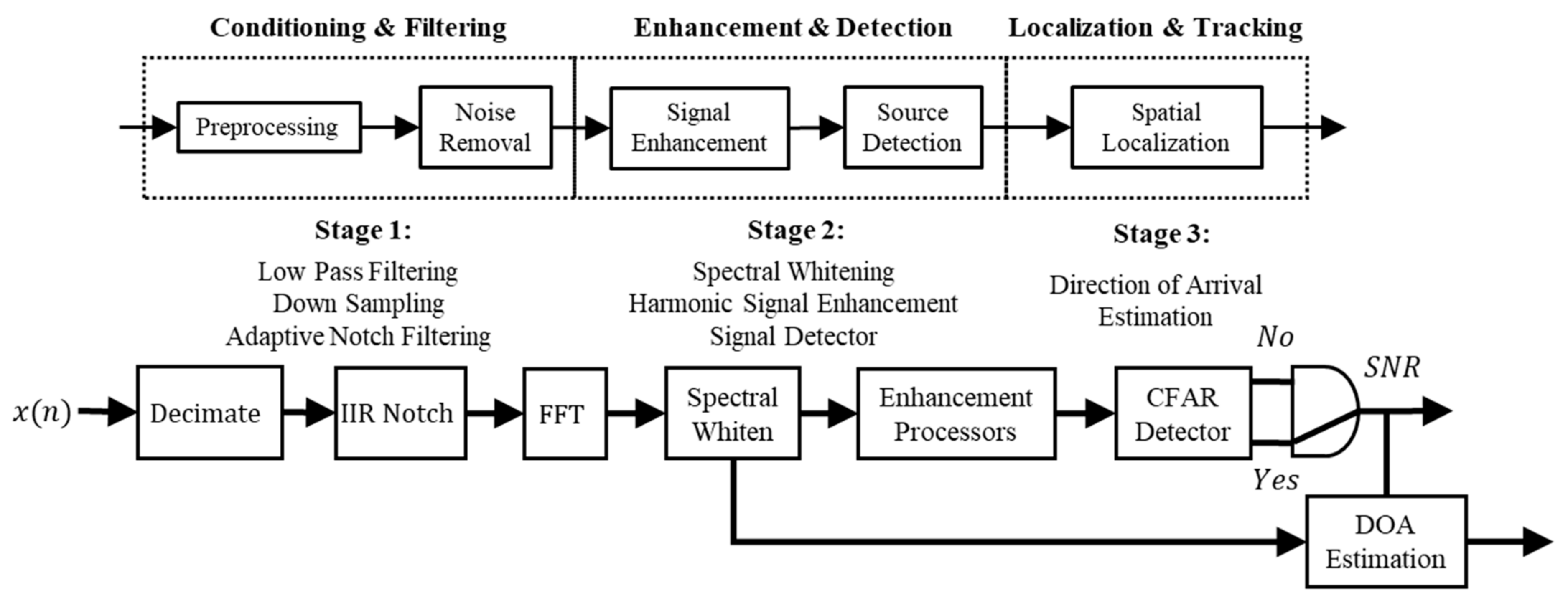
The experiment was originally conducted using a total of four microphones. However, a malfunctioning external power supply corrupted two of the channels with excess noise rendering them useless. Thus, data processing was performed using only two of the recorded signals. Since both aircraft were in relatively close proximity throughout the experiment, observed source frequencies were highly non-stationary. Because of this, the use of alternative methods such as coherence-based detection would not perform well since it requires a relatively stationary signal for an upwards of 4 to 6 windowed segments [
42]. Instead, the signals were enhanced using the HSTs previously presented. The effectiveness of the technique is verified by comparing the results to that obtained via the standard incoherent mean as defined by the following:
Table 6,
Table 7 and
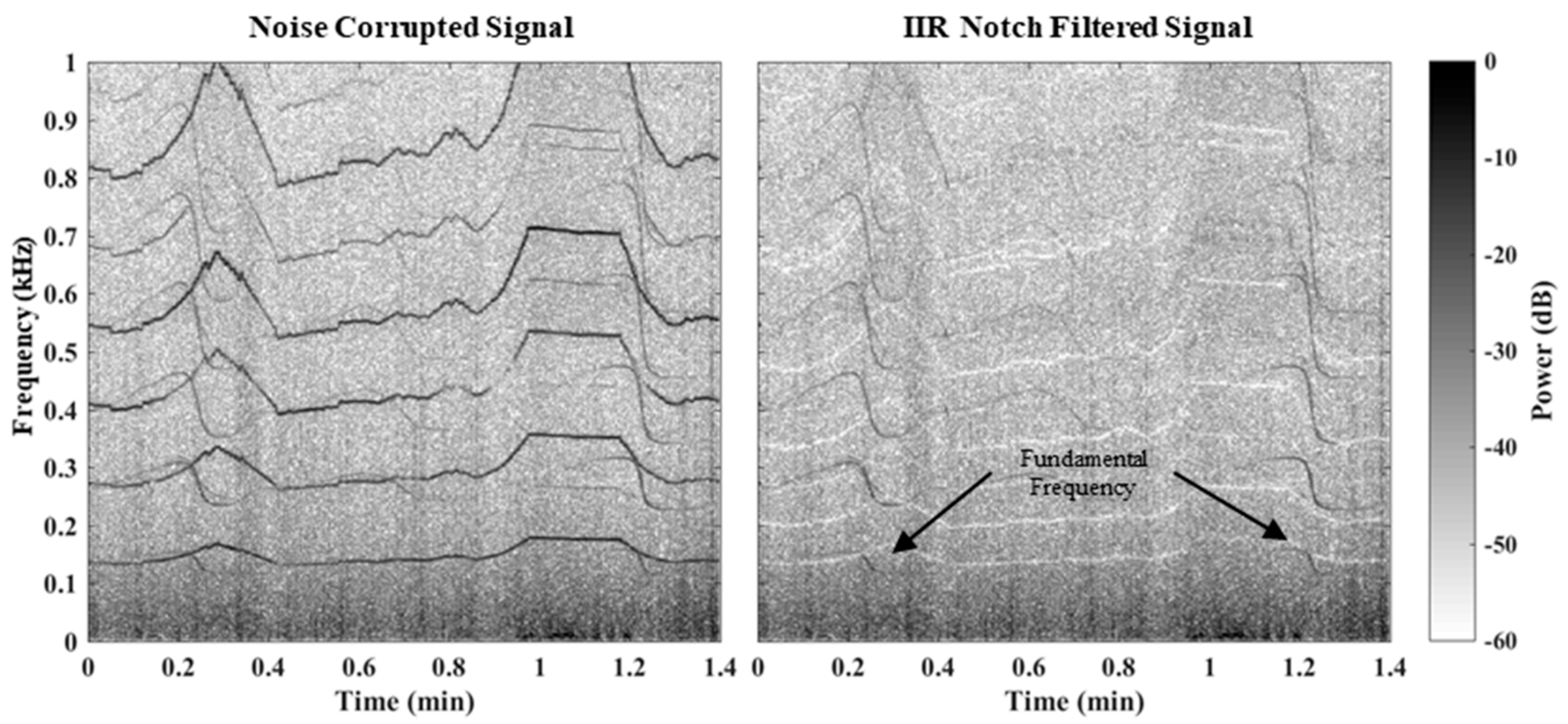
Table 8 provide the notch filter, FFT, spectral whitening, and SCDF-CFAR parameters used. Nonstationary narrowband noise generated by the sensing aircraft propulsion system was removed via the referenceless adaptive IIR notch filtering approach proposed by Tan [
27,
28,
29,
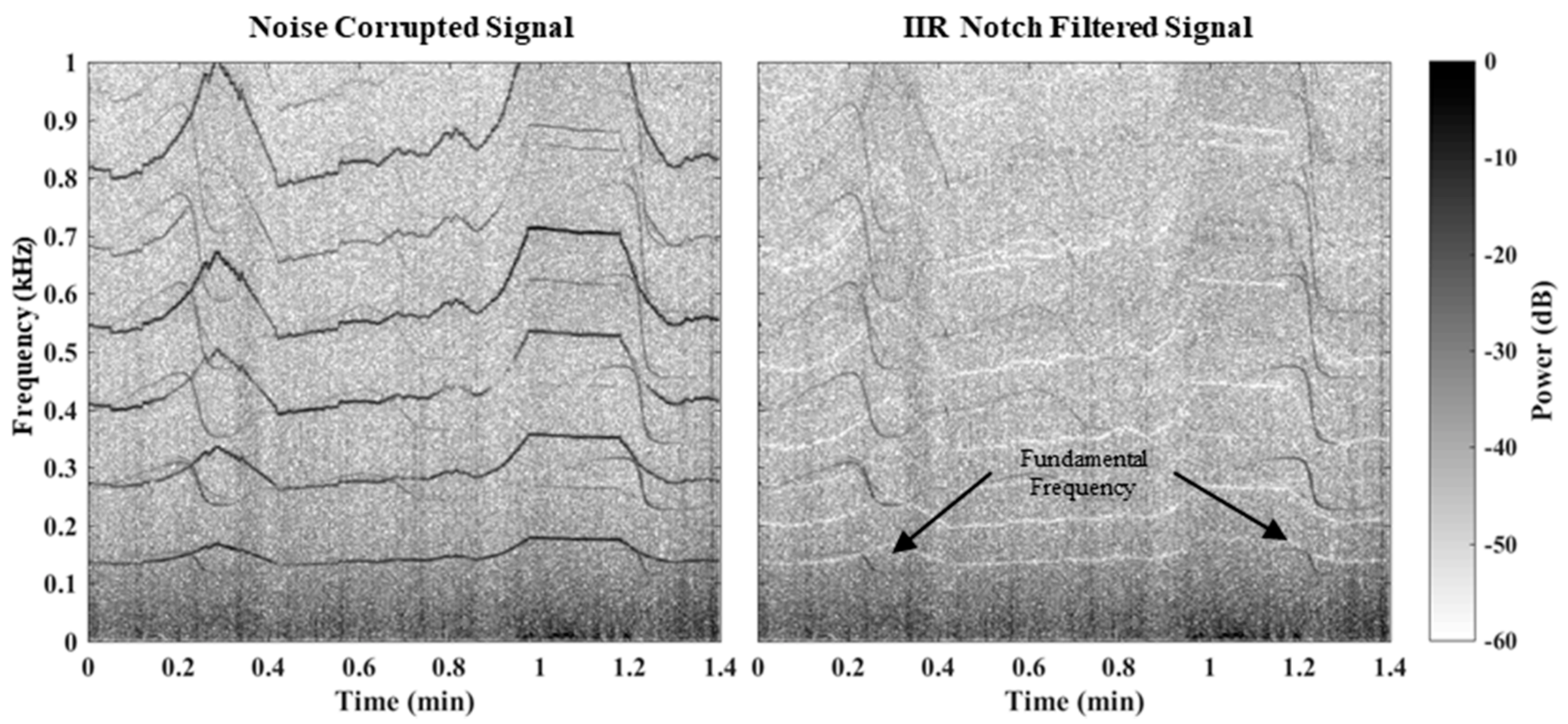
30], since the aircraft engine was running continuously throughout the experiment.
Figure 10 provides sample spectrogram plots, which demonstrate the effectiveness of the adaptive IIR notch filtering approach.
Note that the selective cell distribution-free CFAR detector (SCDF-CFAR) previously presented by Harvey and O’Young was used [
43]. In brief, it is essentially equivalent to the CDF-CFAR detector presented above by Equations (11)–(14), except only the
largest cells contained in the test band
are evaluated instead of all
cells. A more detailed explanation of this detector may be found in [
43]. Two sets of detection parameters are provided in the table since two enhancement processors were used, which evidently have different spectral properties with regard to possible detector configurations. These included the standard incoherent mean (
) and the standard mean HST (
) using six (
) harmonics. Since the recorded signals were decimated to a final sampling rate of 4800 Hz, the maximum noise frequency band only ranged from 0 to 400 Hz for the HST processor. In contrast, the incoherent mean was free to utilize noise samples across the entire signal bandwidth (0 to 2400 Hz). However, noise sample sizes were chosen such that each processor produced an equivalent false alarm rate as indicated in the table. In addition to the noise sample size, frequency test bands were also different for the two processed signal forms. The HST test band contained only the expected source fundamental frequency range (100 to 200 Hz). However, a visual analysis of the recorded signal spectra for the incoherent mean revealed that the second harmonic component was of much greater amplitude and thus better suited for detection. This effectively doubled the expected source frequency range (200 to 400 Hz) for that processor.
Presented false alarm probabilities for the HST were calculated using Equations (10)–(14). These equations were also used for the incoherent mean to maintain consistency, and because the fractional peak properties of the detection method would automatically exclude surrounding harmonic components from being included in the noise sample estimate.
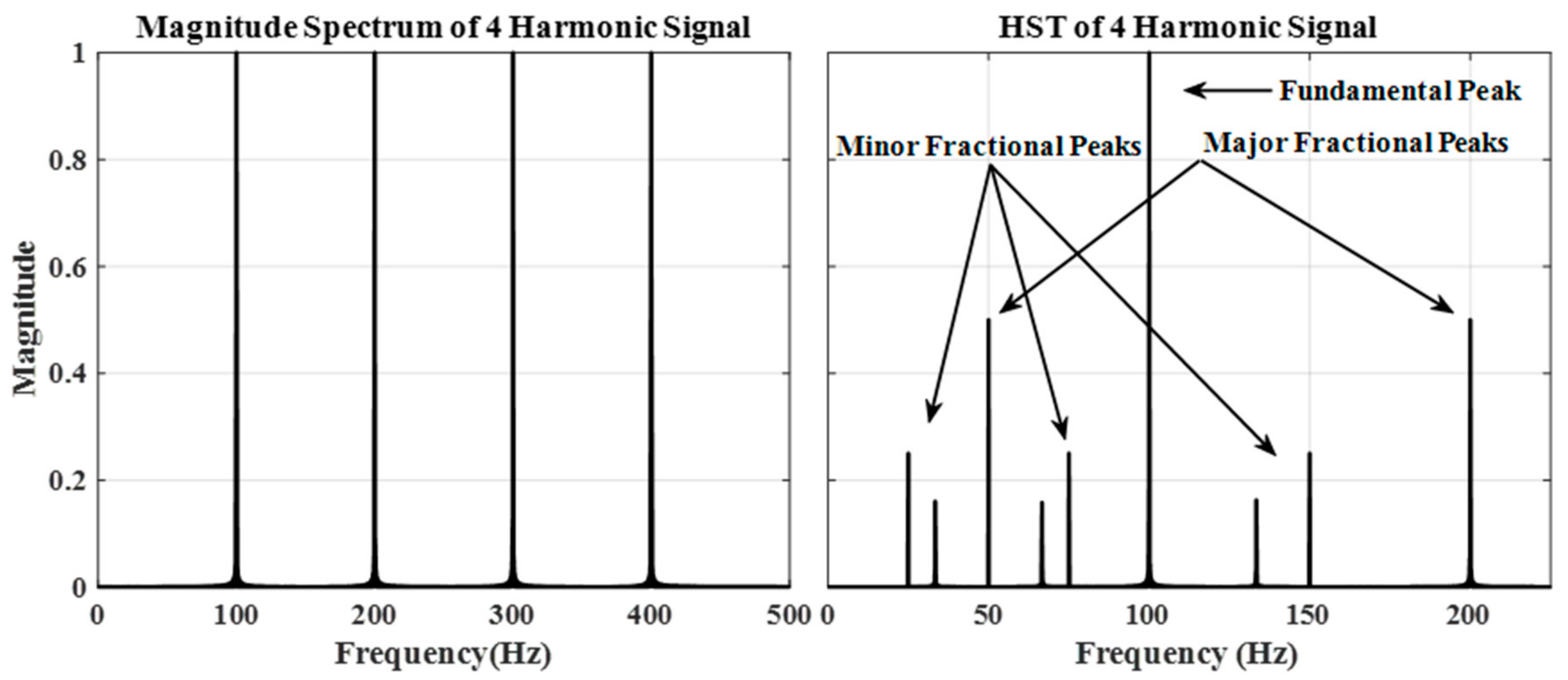
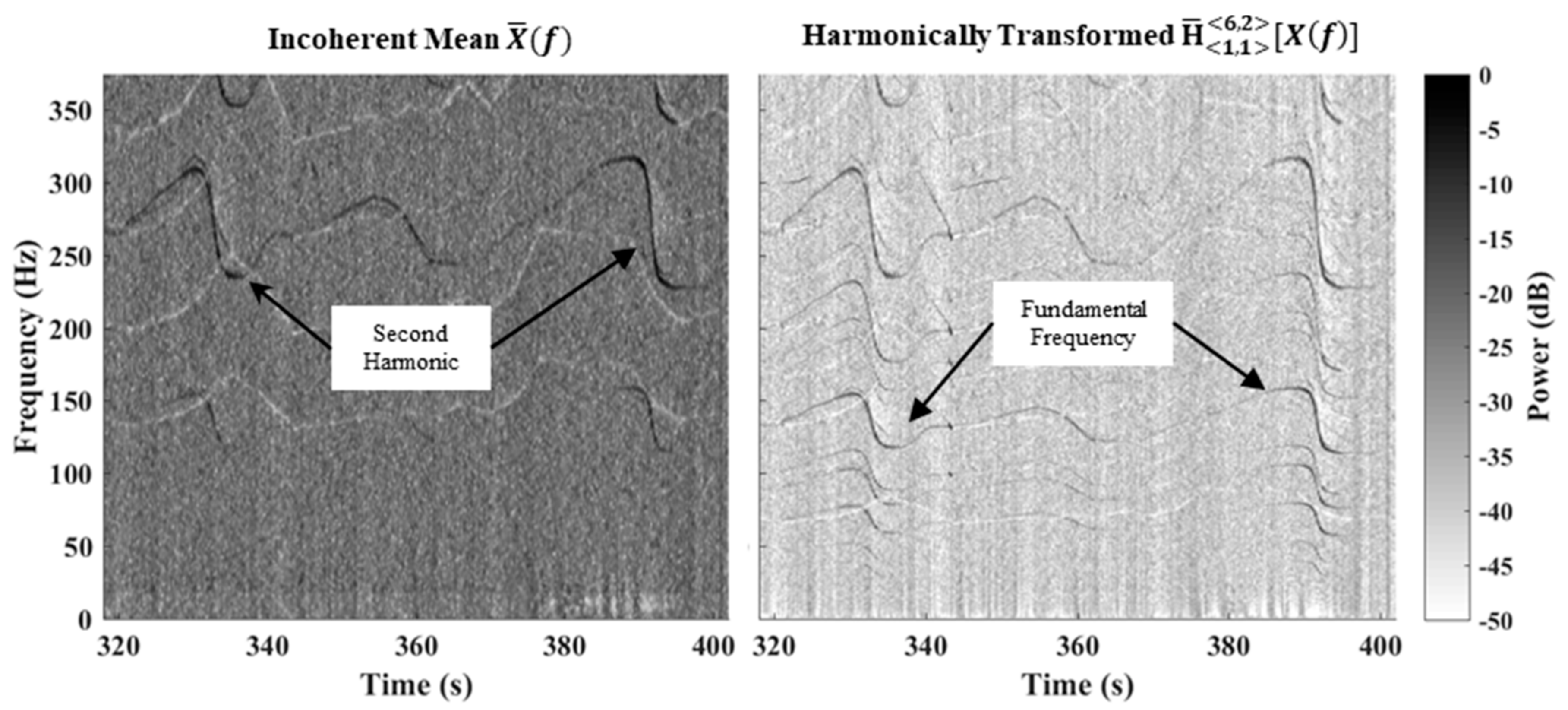
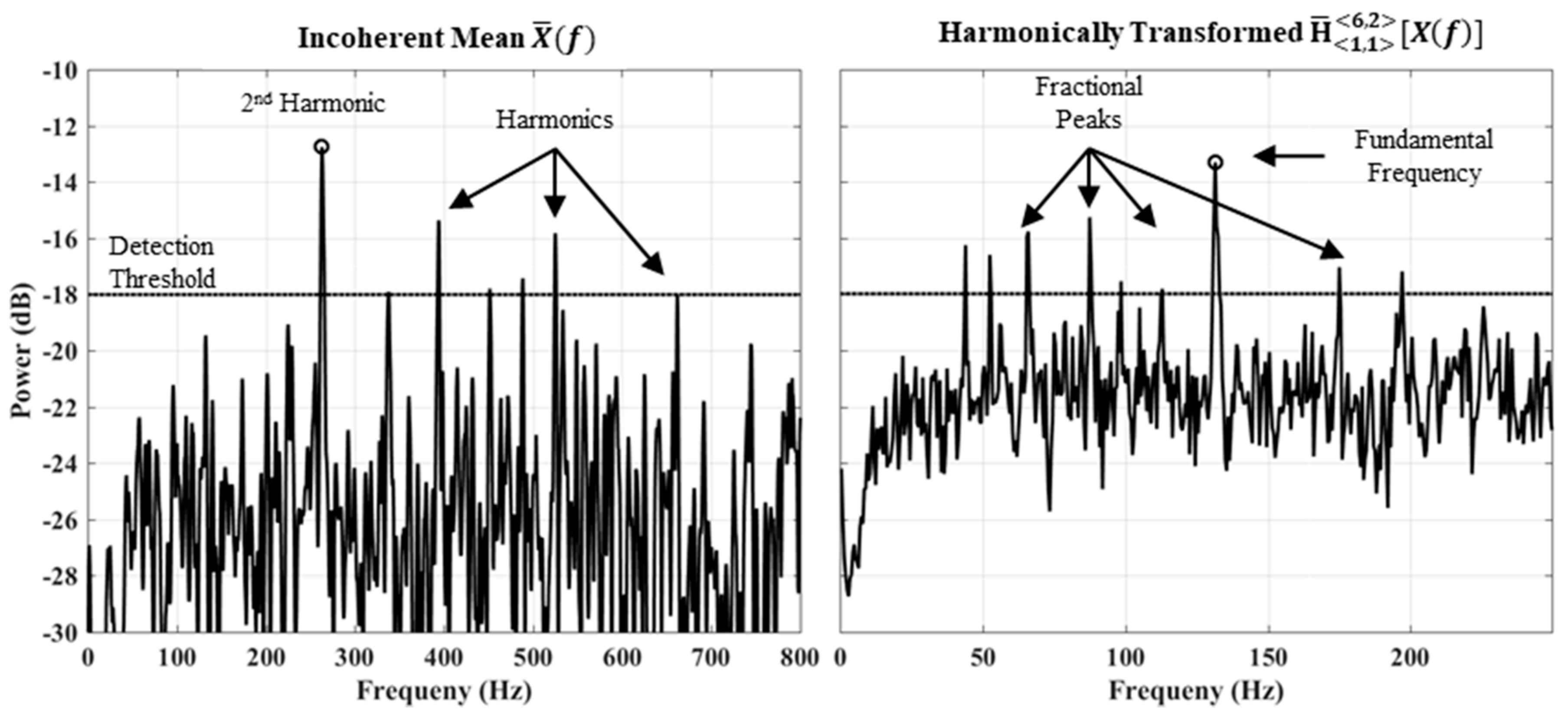
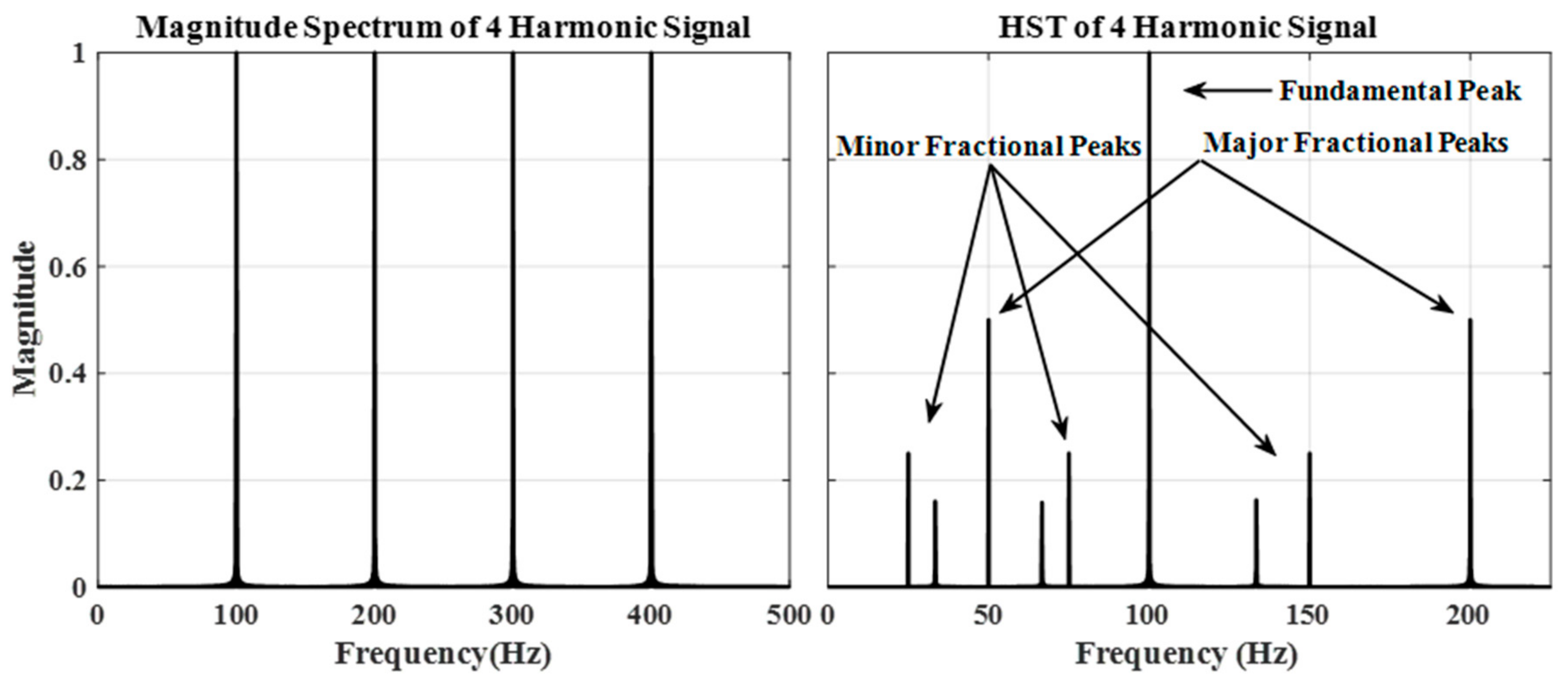
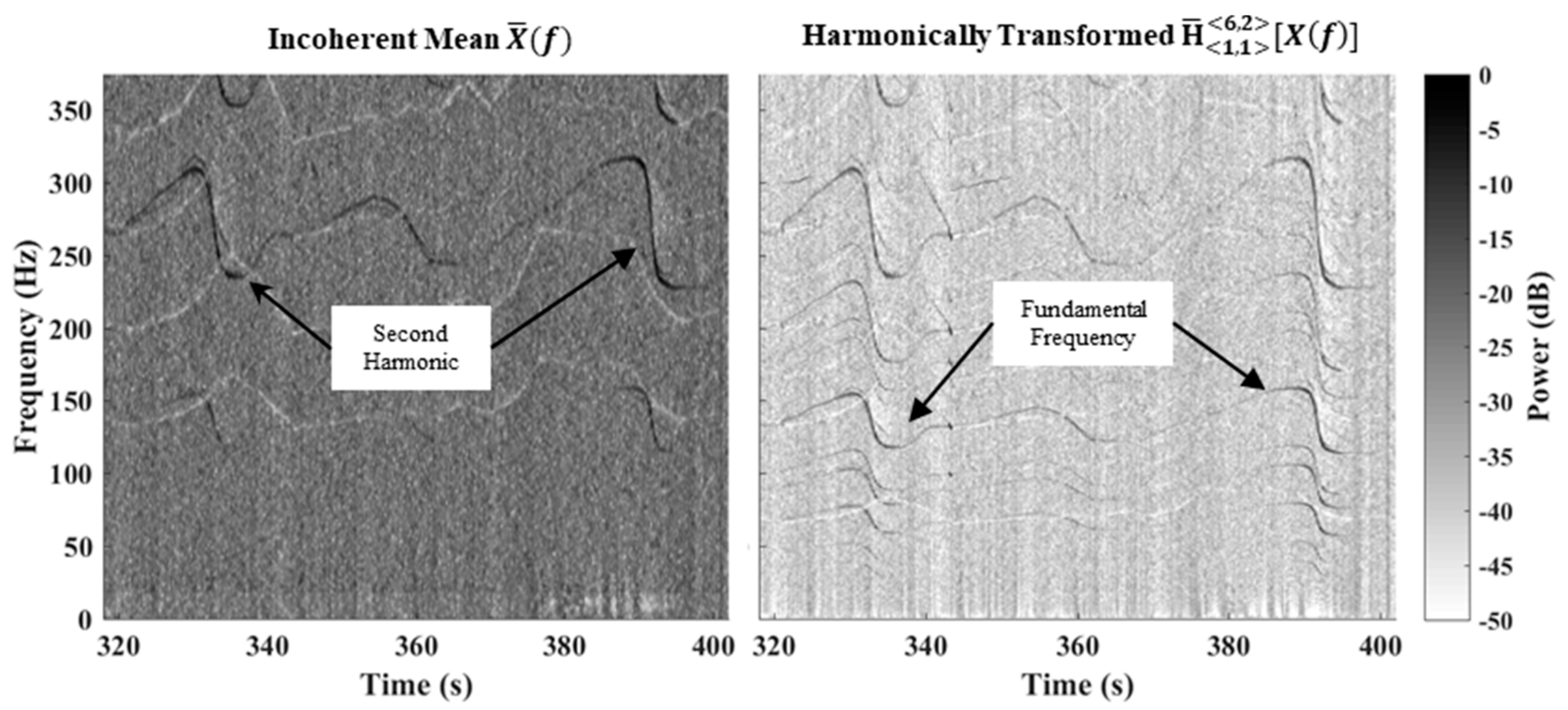
Figure 11 provides sample spectrogram plots of the average power and harmonically transformed signals. It is evident from the HST spectrogram that a large number of fractional peaks are in fact present. In theory, a total of 17 fractional peaks may be present as previously indicated by
Table 4. In addition, it is clear the second harmonic component has the highest peak prominence for the incoherent mean form. This is also visible from the sample detection spectra displayed in
Figure 12.
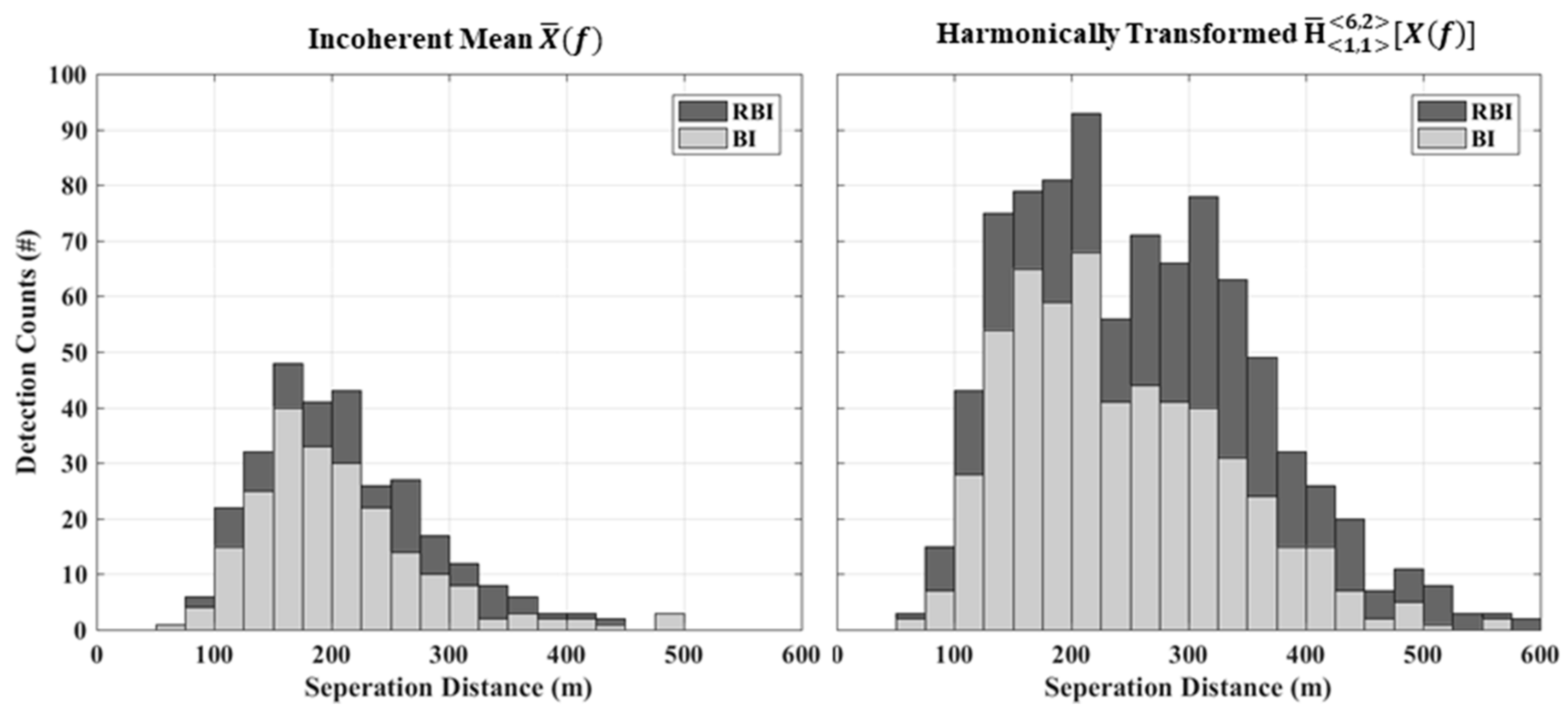
Table 9 provides the detection results for each enhancement processor and detection scheme. From a comparison of the results obtained, it is evident that the harmonically transformed signals produced the highest detectability for all three schemes. The total number of detections were nearly double for all cases, while detection distances were also significantly increased. A total of 1930 detections were achieved for the harmonically transformed signal, with a maximum and mean range of 678 and 302 m, respectively. It is apparent that the single trial (ST) method produced the highest number of detections. However, when considering the false alarm rate associated with this method (
) as given in
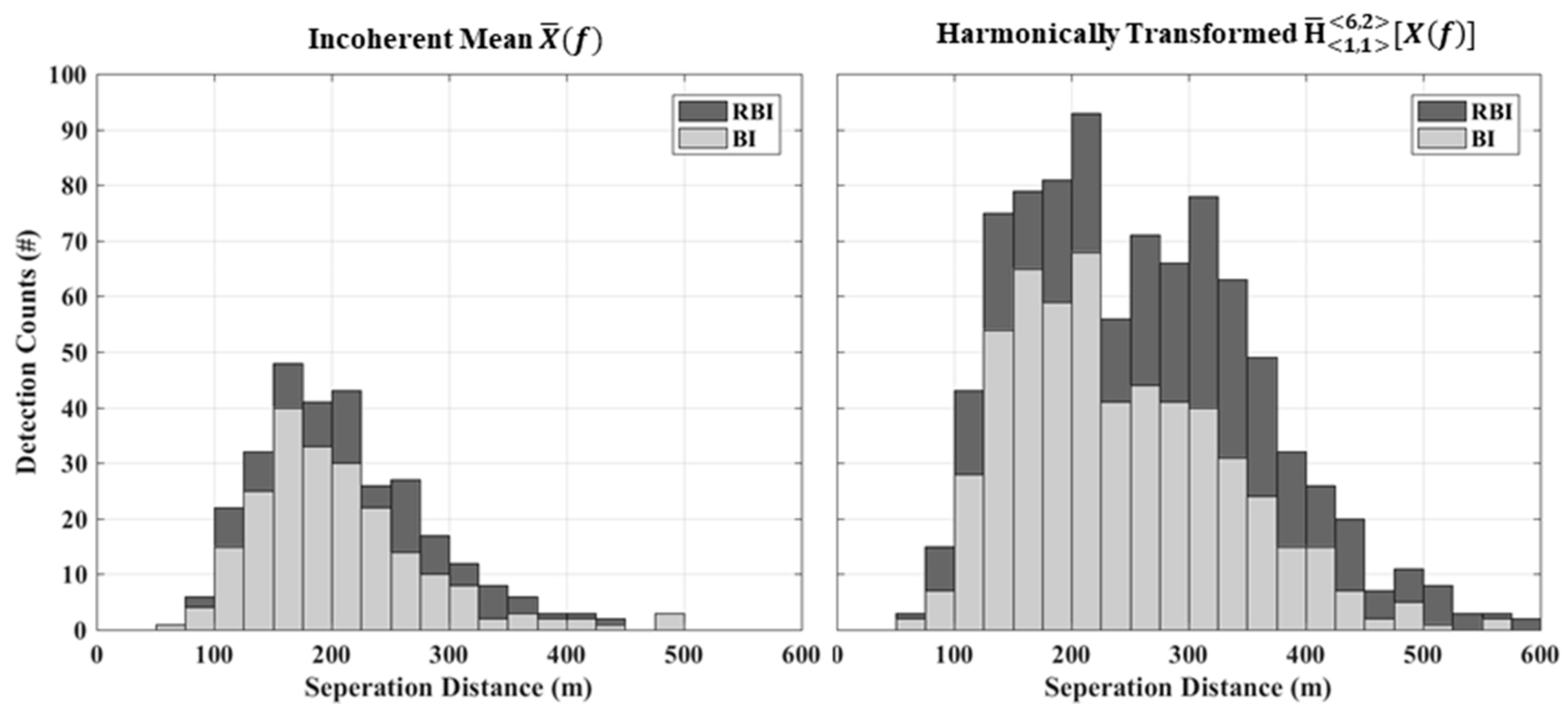
Table 8, it is evident that values are too high for this detector to be of practical use. Binary integration (BI) was found to greatly reduce this value to an acceptable level, but at the expense of signal detectability. Since source signals were highly non-stationary as previously discussed, application of the robust binary integration (RBI) provided some alleviation to this issue. This is also evident in a more visual form via the histogram plots displayed in
Figure 13. From the plots, it is visible that the RBI scheme provides a significant detectability increase in the 200 to 350 m range. This result is significant since this region dedicates the lower limit at which another UAV can be detected with adequate distance to perform an avoidance maneuver as previously indicated by
Table 5.
Using the basic attenuation laws for acoustic propagation in an ideal medium, a crude approximation may also be obtained for the maximum detection distances achievable for other aircraft such as a Cessna, for example. Using the process previously outlined by Harvey and O’Young in [
26], the following equation may be established:
where
is the effective Sound Pressure Level (in dB) difference between the current reference aircraft and some other source of concern,
is the reference distance at a point of detection, and
is the maximum estimated detection distance for the target source. Since it was previously determined in [
26] that a change in acoustic
SPL (in dB) is directly proportional to a change in signal power (in dB), the above equation can be used to compare theoretical detection distances by simply replacing the change in
SNR described in [
26] by the difference in
SPL level for the two acoustic sources.
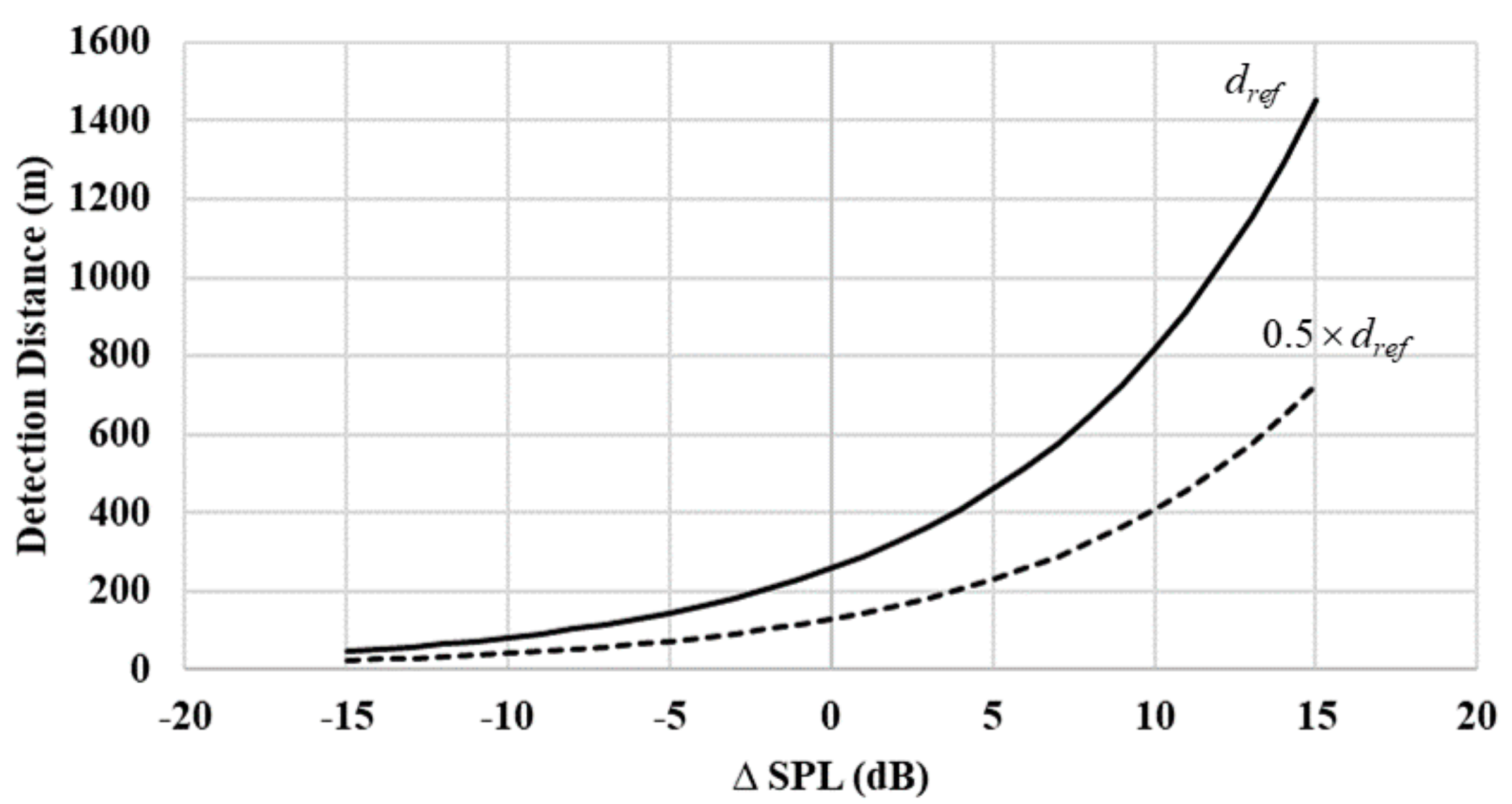
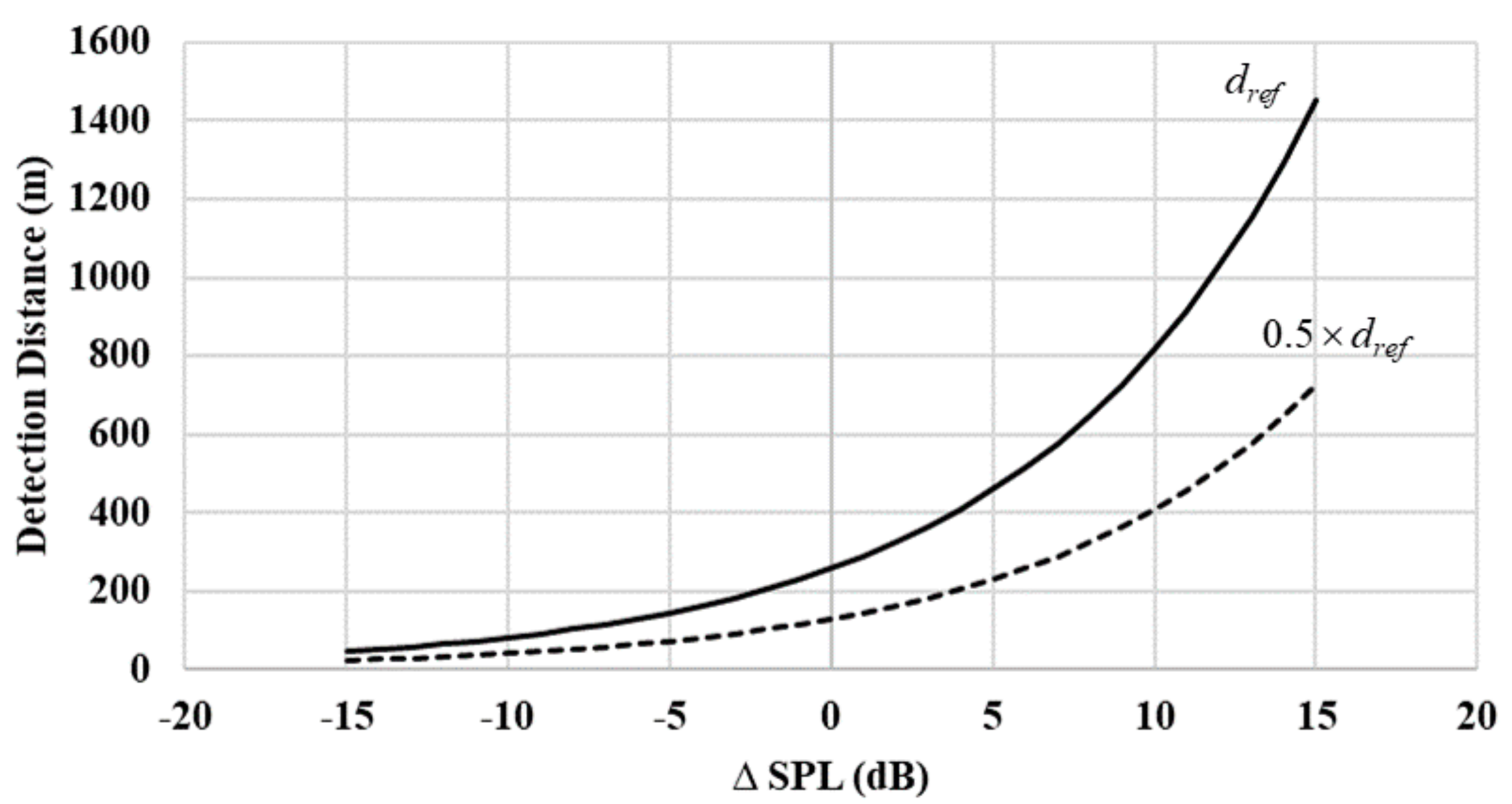
Figure 14 provides the maximum expected detection distances for a range of
values using the Giant Big Stik UAV as the base reference level. Since atmospheric attenuation factors were omitted from the function form presented above by Equation (29), conservative estimates using 50% of the calculated values are also provided. A reference distance of 258 m was used, which is the mean detection distanced obtained via the HST method in conjunction with the RBI detection scheme as indicated in
Table 9.
Consider, for example, a Cessna 185 that has an
SPL of approximately 130 dB providing a
level of 15 dB compared to the Giant Big Stik UAV [
44]. According to
Figure 14, the aircraft should be detectable somewhere between approximately 800 and 1400 m away. When examining the minimum detection distances required to avoid a collision as previously presented in
Table 5, it appears the aircraft should have been detected with sufficient distance. Such results are also found to agree with that previously presented in [
26]. Conversely, aircraft with a lower operating
SPL, such as smaller UAVs, would be detected at shorter distances as indicated by the plot. Ultimately, experiments are required for a range of aircraft types to determine maximum detection distances, since the presented values assume ideal propagation conditions, which ignore effects such as wind, temperature gradients, ground conditions, etc.; all of these may reduce the actual detection distances.
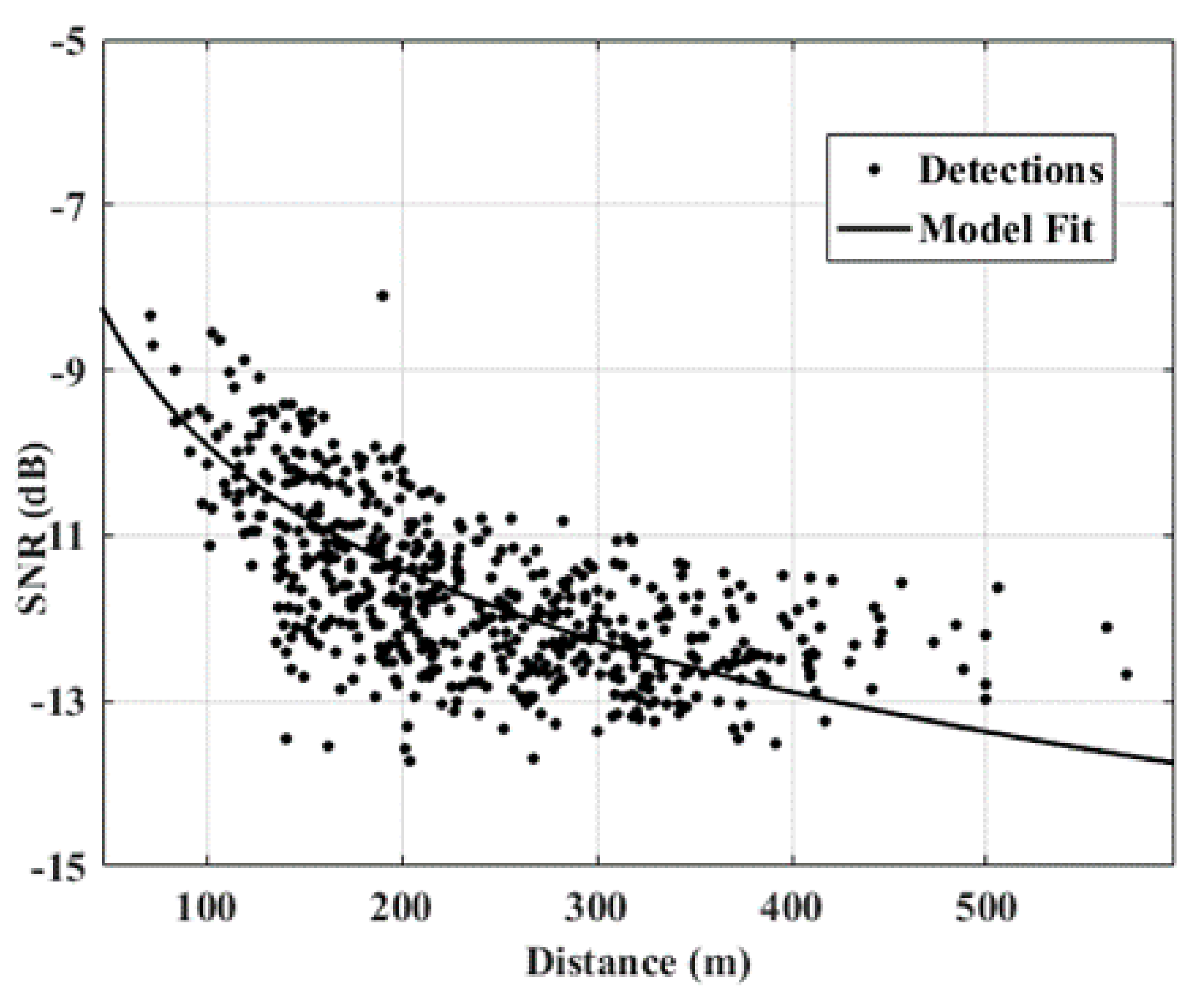
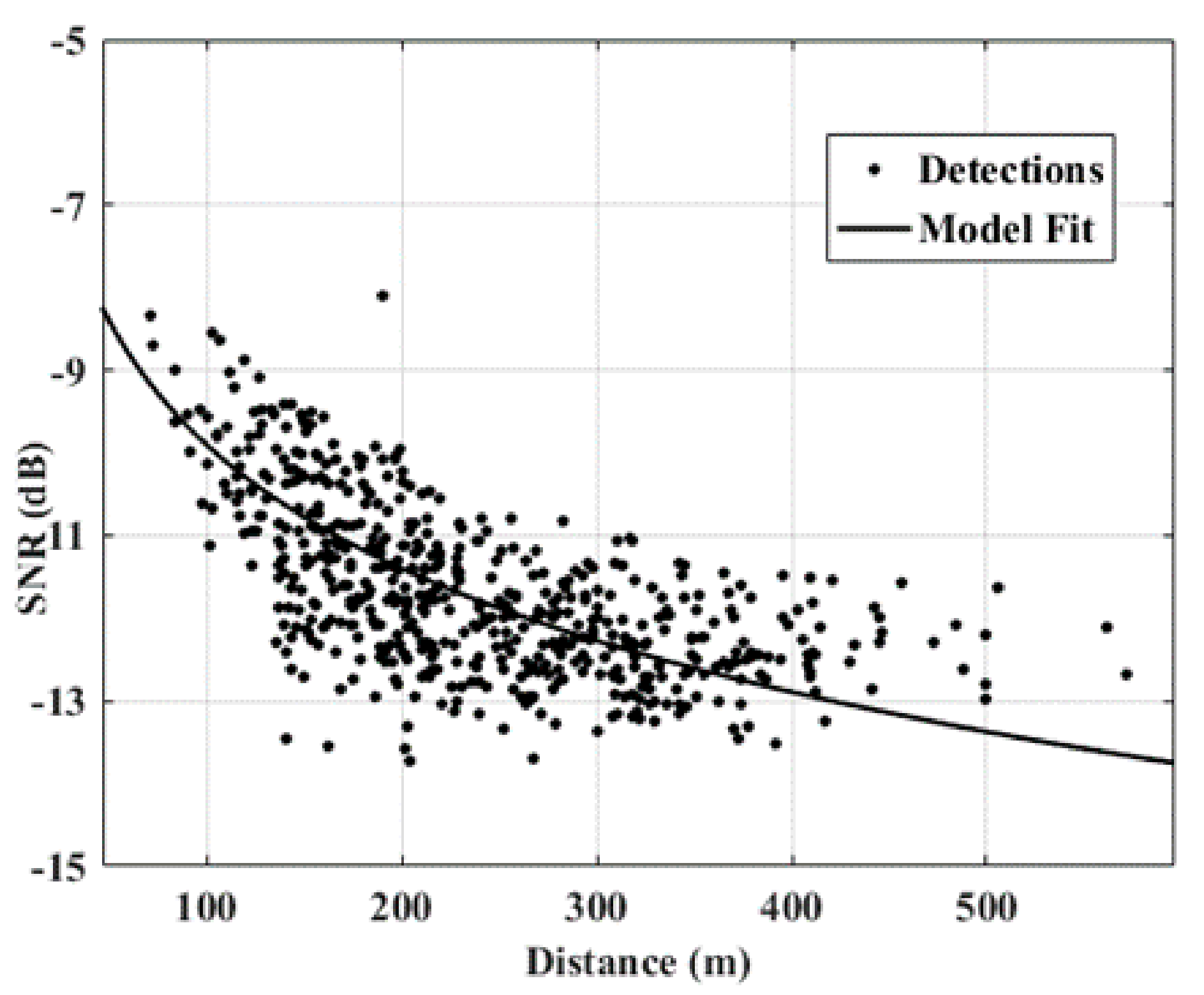
Figure 15 provides a plot of the
SNR with respect to distance for each detection point. Since it was previously established in [
26] that
, the observed values may be modeled using the acoustic attenuation laws according to:
where
represents the linear
SPL/
SNR proportionality or scaling constant and
represents an atmospheric absorption factor. From the plot it is evident that the observed
SNR values do follow the trend predicted by the model. This provides verification that the above extrapolation approach is valid.





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}