1. Introduction
With the advancement of intelligent manufacturing, sensing technology has attracted people’s attention, and especially the application of flexible sensors, which are accompanied by a variety of functions [
1]. Currently, rotation and angle detection are topics that people seldom discuss. Many studies have merely focused on normal or shear force detection; even shear angle analyses and torsion detection can hardly be found. For instance, Pang et al. proposed a nanofiber sensor for rotational detection [
2]. This sensor gave us an idea of what rotational sensing could be; however, this study focused on the motion itself and did not go further into angle analysis. Choi et al. also proposed a rotational sensor based on frictional torque. The ion gel level in the sensor rose when the rotational force was greater, resulting a smaller contact area [
3]. In particular, the detection of a rotation force and its angle has not been frequently found in current research. In addition, attention has been paid to the performance of power while its rotation angles have not yet been studied; therefore, we take the advantage of this gap to develop a tactile sensor that analyzes the rotation angle of forces.
2. Materials and Methods
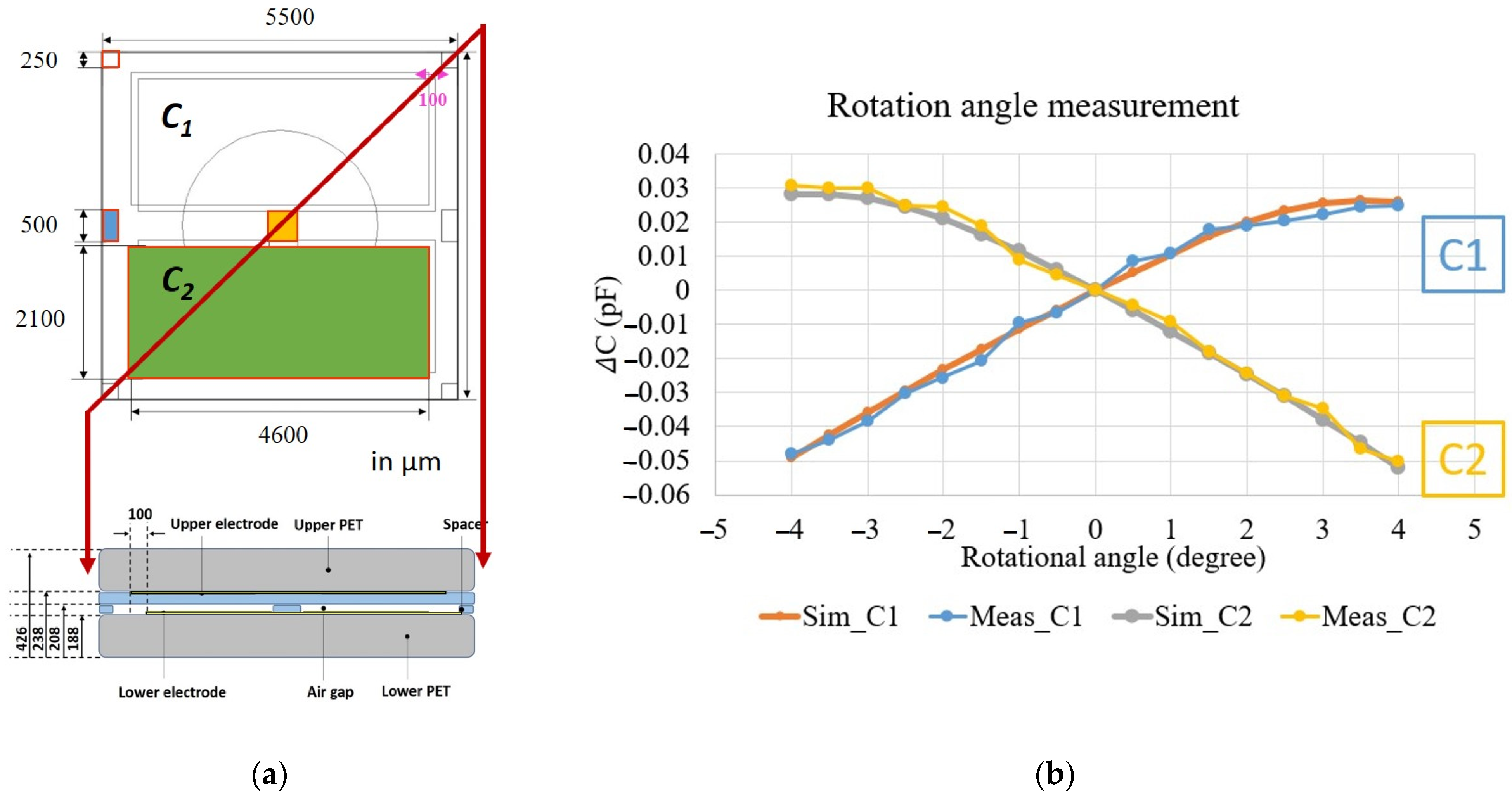
In this sensor, there are 8 layers from the bottom up, as illustrated in
Figure 1a. In the spacers, three settings are involved: four squares in the corners, two sides featuring rectangular spacers, and another square in the middle; all are 20 μm in height. The fourth layer is a PDMS plane with a thickness of 30 μm, ensuring two electrodes remain 50 μm apart. In addition, two electrodes of the same size, which are 4600 μm × 2100 μm, are intentionally shifted with 100 µm clearance to enable angle detection. To understand the suitability of this sensor for manufacturing, numerical evaluation is used to predict the results. With the applying of rotation, a change in capacitance value is observed. Consequently, the angle measurement of the sensor design is validated using a rotational stage, as shown in
Figure 1b.
3. Discussion
Our result of a capacitance response is simulated by setting rotation angles from −4° to 4°. The capacitance variation tends to be linear from −2.5° to 4° for ΔC1 and −4° to 2.5° for ΔC2. The upper electrode, ΔC1, tends to be saturated from 2.5° to 4° while the bottom electrode, ΔC2, develops further toward a more negative value. It was found that these measurements overlap with the simulation results, proving the feasibility of this sensor. We assume that the ideal overlapping area is correlative to capacitance change. Then, we substituted ΔA1 and ΔA2’s linear fitting results, with relation to the rotational angle (φ) and ΔC, into (1); hence, (2) and (3) can be summarized. The ideal overlapping area in m2 can be analyzed using AUTOCAD and linear fitting for ΔC1 and ΔC2. It can be seen that the ideal overlapping area’s changes are mostly the same with fitting; however, for an angle greater than 2.5° (ΔC1) or smaller than −2.5° (ΔC2), the variation does not obey the fitting results, which means that errors occur for ΔC1 and ΔC2. Therefore, when the angle is between 2.5° and −4°, ΔC1 is used to obtain the angle; on the other hand, when the angle is between −2.5° and 4°, ΔC2 is used.
Author Contributions
Conceptualization, methodology, validation, analysis, investigation and the manuscript draft are attributed to Y.-W.C. Review, supervision and project administration are attributed to C.-Y.L. All authors have read and agreed to the published version of the manuscript.
Funding
This research was funded by the Ministry of Science and Technology in Taiwan (MOST108-2628-E-007-002-MY3) and National Tsing Hua University (109Q2720E1 and 110Q2720E1).
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
Dataset available on request from the authors.
Conflicts of Interest
The authors declare that no conflicts of interest are associated with this publication.
References
- Zhang, Q.; Jia, W. Flexible wide-range capacitive pressure sensor using micropore PE tape as template. SMS 2019, 28, 115040. [Google Scholar] [CrossRef]
- Pang, C.; Lee, G.-Y. A flexible and highly sensitive strain-gauge sensor using reversible interlocking of nanofibers. Nat. Mater. 2012, 11, 795–801. [Google Scholar] [CrossRef] [PubMed]
- Choi, D.; Jang, S. A Highly Sensitive Tactile Sensor Using a Pyramid-Plug Structure for Detecting Pressure, Shear Force, and Torsion. Adv. Mater. Technol. 2019, 4, 1800284. [Google Scholar] [CrossRef]
| Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).



{kind=link}