Origami-Inspired Shape Memory Folding Microactuator †

 , and
, and 
Abstract
:1. Introduction
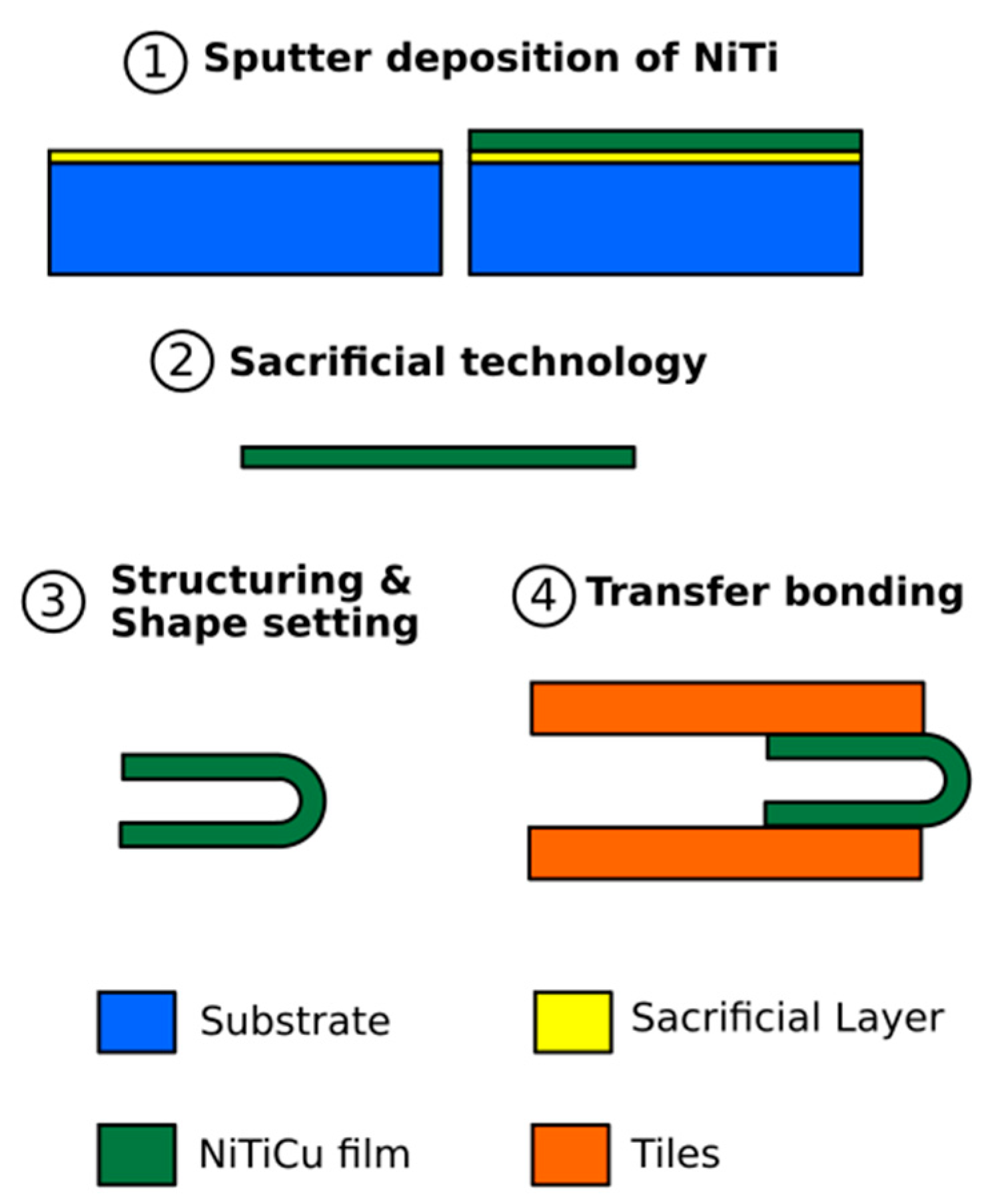
2. Materials and Fabrication
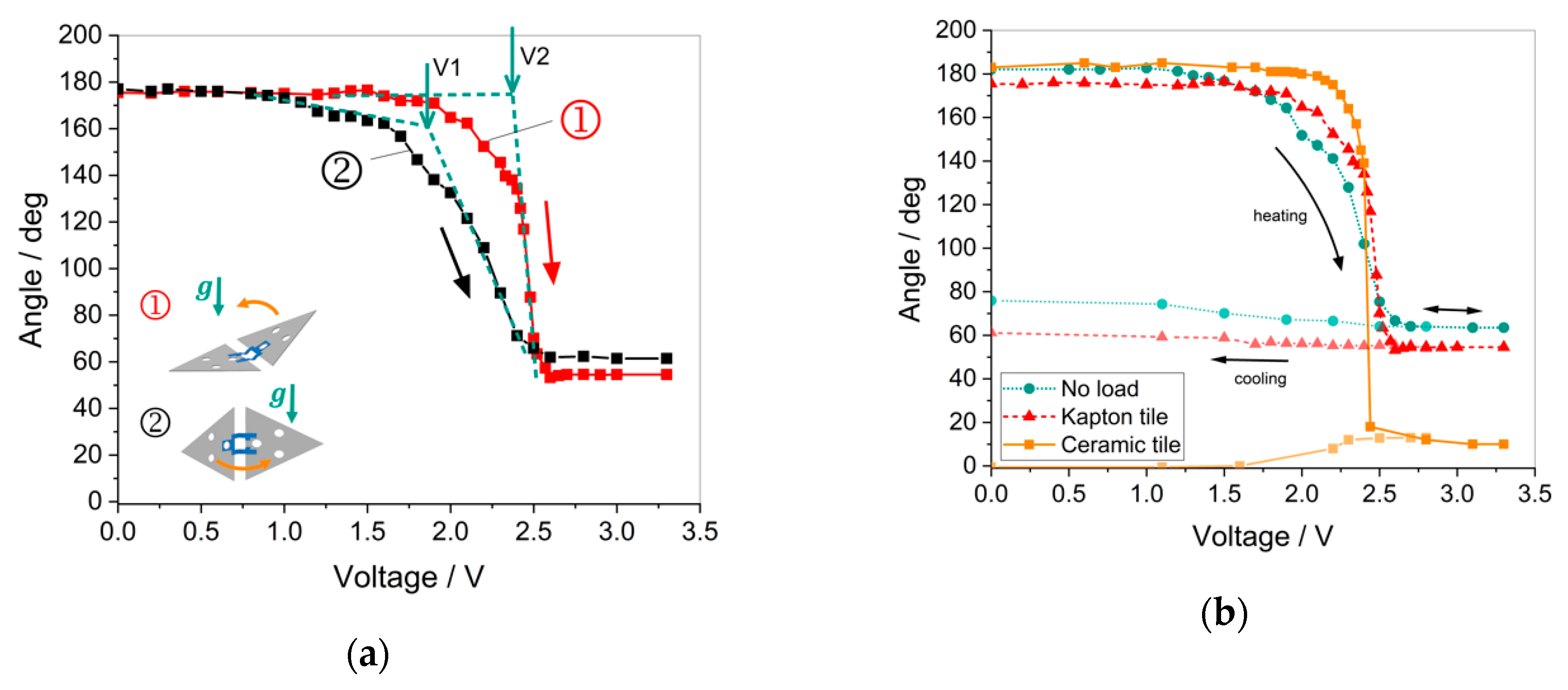
3. Results
4. Conclusions
Author Contributions
Funding
Conflicts of Interest
Abbreviations
| FE | Finite element |
| IR | Infrared |
| SMA | Shape memory alloy |
References
- Cromvik, C.; Eriksson, K. Airbag folding based on origami mathematics. In Proceedings of the Fourth International Meeting of Origami Science, Mathematics, and Education, Pasadena, CA, USA, 8–10 September 2006. [Google Scholar]
- Hoffman, R. Airbag folding: Origami design applied to an engineering problem. In Proceedings of the Third International Meeting of Origami Science, Mathematics and Education, Asilomar, CA, USA, 9–11 March 2001. [Google Scholar]
- Baek, S.-M.; Lee, D.-Y.; Cho, K.-J. Curved Compliant Facet Origami-Based Self-Deployable Gliding Wing Module for Jump-Gliding. In Proceedings of the ASME 2016 International Design Engineering Technical Conferences and Computers and Information in Engineering Conference, Charlotte, NC, USA, 21–24 August 2016. [Google Scholar]
- Hawkes, E.; An, B.K.; Benbernou, N.M.; Tanaka, H.; Kim, S.; Demaine, E.D.; Rus, D.L.; Wood, R.J. Programmable matter by folding. Proc. Natl. Acad. Sci. USA 2010, 107, 12441–12445. [Google Scholar] [CrossRef] [PubMed]
- Peraza-Hernandez, E.A.; Hartl, D.J.; Malak, R.J. Design and numerical analysis of an SMA mesh-based self-folding sheet. Smart Mater. Struct. 2013, 22. [Google Scholar] [CrossRef]
- Firouzeh, A.; Sun, Y.; Lee, H.; Paik, J. Sensor and actuator integrated low-profile robotic origami. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems, Tokyo, Japan, 3–7 November 2013; pp. 4937–4944. [Google Scholar]
- Paik, J.K.; Wood, R.J. A bidirectional shape memory alloy folding actuator. Smart Mater. Struct. 2012, 21, 065013. [Google Scholar] [CrossRef]
- Zhakypov, Z.; Huang, J.-L.; Paik, J. A Novel Torsional Shape Memory Alloy Actuator: Modeling, Characterization, and Control. IEEE Robot. Autom. Mag. 2016, 23, 65–74. [Google Scholar] [CrossRef]
- Jeong, J.W.; Yoo, Y.I.; Kil Shin, D.; Lim, J.H.; Kim, K.W.; Lee, J.J. A novel tape spring hinge mechanism for quasi-static deployment of a satellite deployable using shape memory alloy. Rev. Sci. Instruments 2014, 85, 025001. [Google Scholar] [CrossRef]
- Lagoudas, D.C. Shape Memory Alloys; Springer: Berlin/Heidelberg, Germany, 2008. [Google Scholar]
- Ishida, A.; Sato, M.; Gao, Z. Properties and applications of TiNiCu shape-memory-alloy thin films. J. Alloys Compd. 2013, 577, S184–S189. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
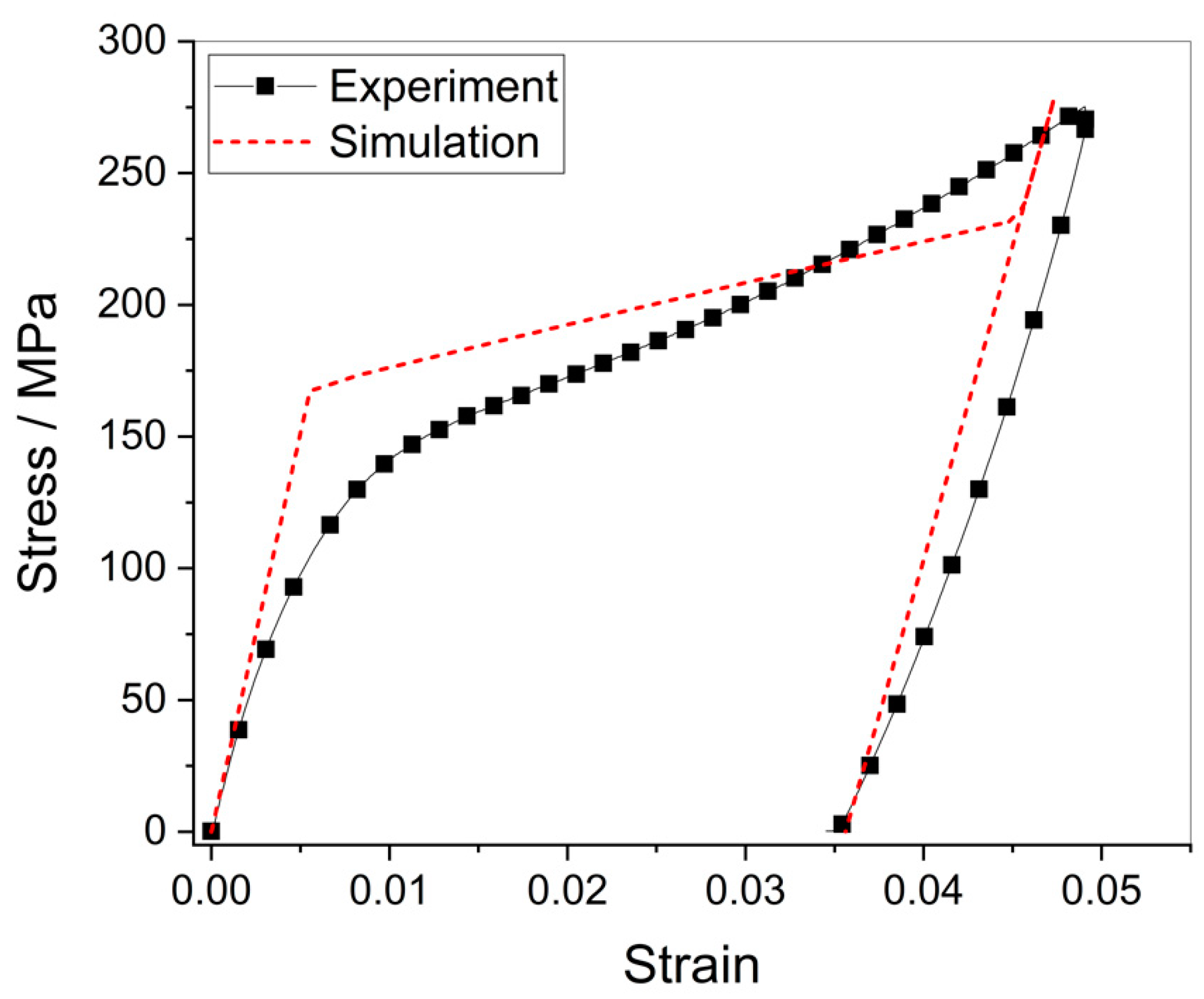
| Parameter | Abb. | Value |
|---|---|---|
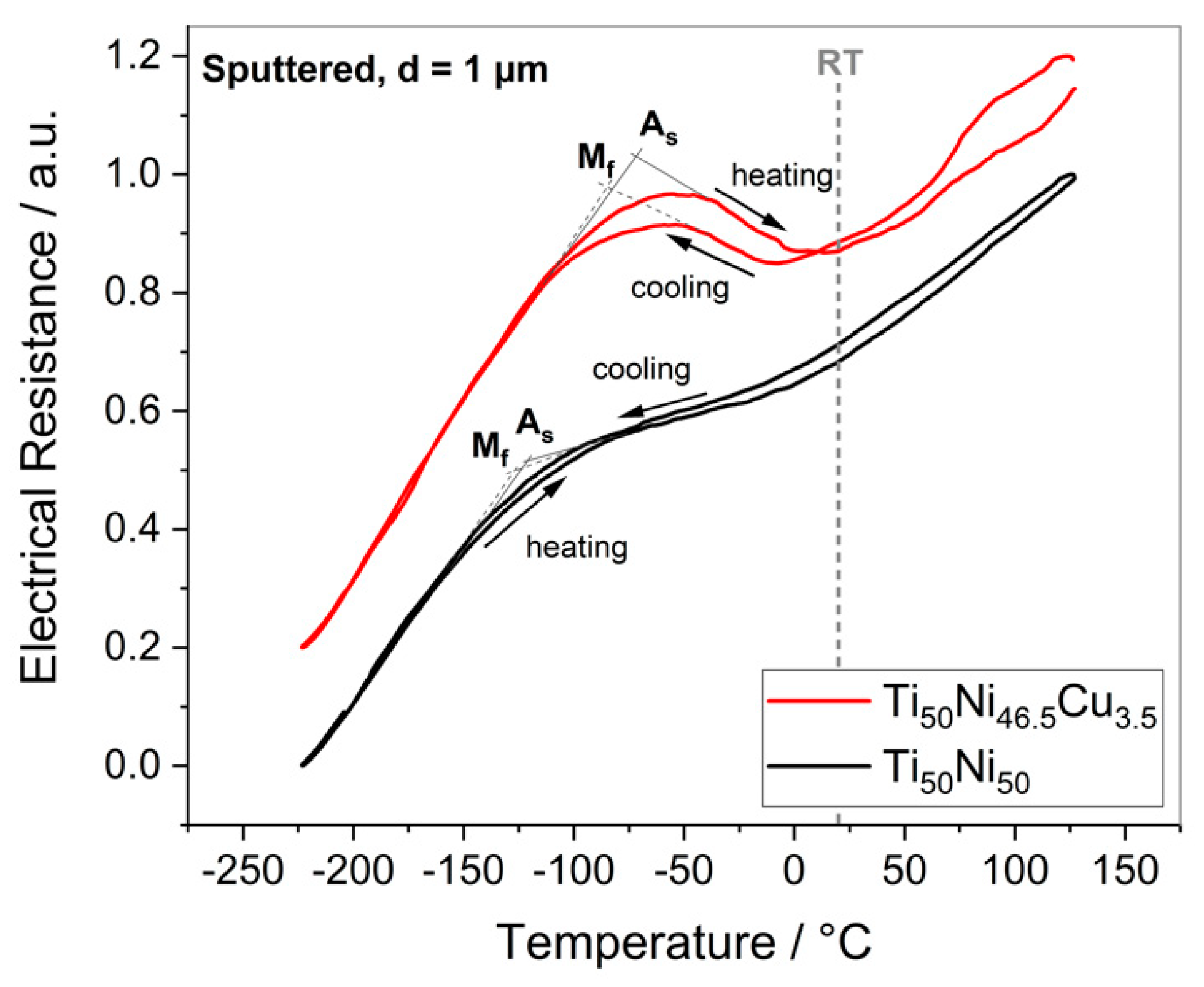
| Martensite Start Temperature | Ms | 19 °C |
| Martensite Finish Temperature | Mf | 9 °C |
| Austenite Start Temperature | As | 52 °C |
| Austenite Finish Temperature | Af | 62 °C |
| R-phase peak Temperature | Rp | 45 °C |
| Young’s Modulus (Martensite) | EM | 25 GPa |
| Youngs’s Modulus (Austenite) | EA | 30 GPa |
| Clausius–Clapeyron coefficient | c | 8.1 MPa/K |
| Transformation Strain | 0.035 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Seigner, L.; Bezsmertna, O.; Fähler, S.; Tshikwand, G.K.; Wendler, F.; Kohl, M. Origami-Inspired Shape Memory Folding Microactuator. Proceedings 2020, 64, 6. https://doi.org/10.3390/IeCAT2020-08480
Seigner L, Bezsmertna O, Fähler S, Tshikwand GK, Wendler F, Kohl M. Origami-Inspired Shape Memory Folding Microactuator. Proceedings. 2020; 64(1):6. https://doi.org/10.3390/IeCAT2020-08480
Chicago/Turabian StyleSeigner, Lena, Olha Bezsmertna, Sebastian Fähler, Georgino Kaleng Tshikwand, Frank Wendler, and Manfred Kohl. 2020. "Origami-Inspired Shape Memory Folding Microactuator" Proceedings 64, no. 1: 6. https://doi.org/10.3390/IeCAT2020-08480
APA StyleSeigner, L., Bezsmertna, O., Fähler, S., Tshikwand, G. K., Wendler, F., & Kohl, M. (2020). Origami-Inspired Shape Memory Folding Microactuator. Proceedings, 64(1), 6. https://doi.org/10.3390/IeCAT2020-08480