Development of Soft Pneumatic Actuators Using High-Strain Elastic Materials with Stress Anisotropy of Short Fibers †

Abstract
:1. Introduction
2. Methods
2.1. Pneumatic Rubber Artificial Muscle
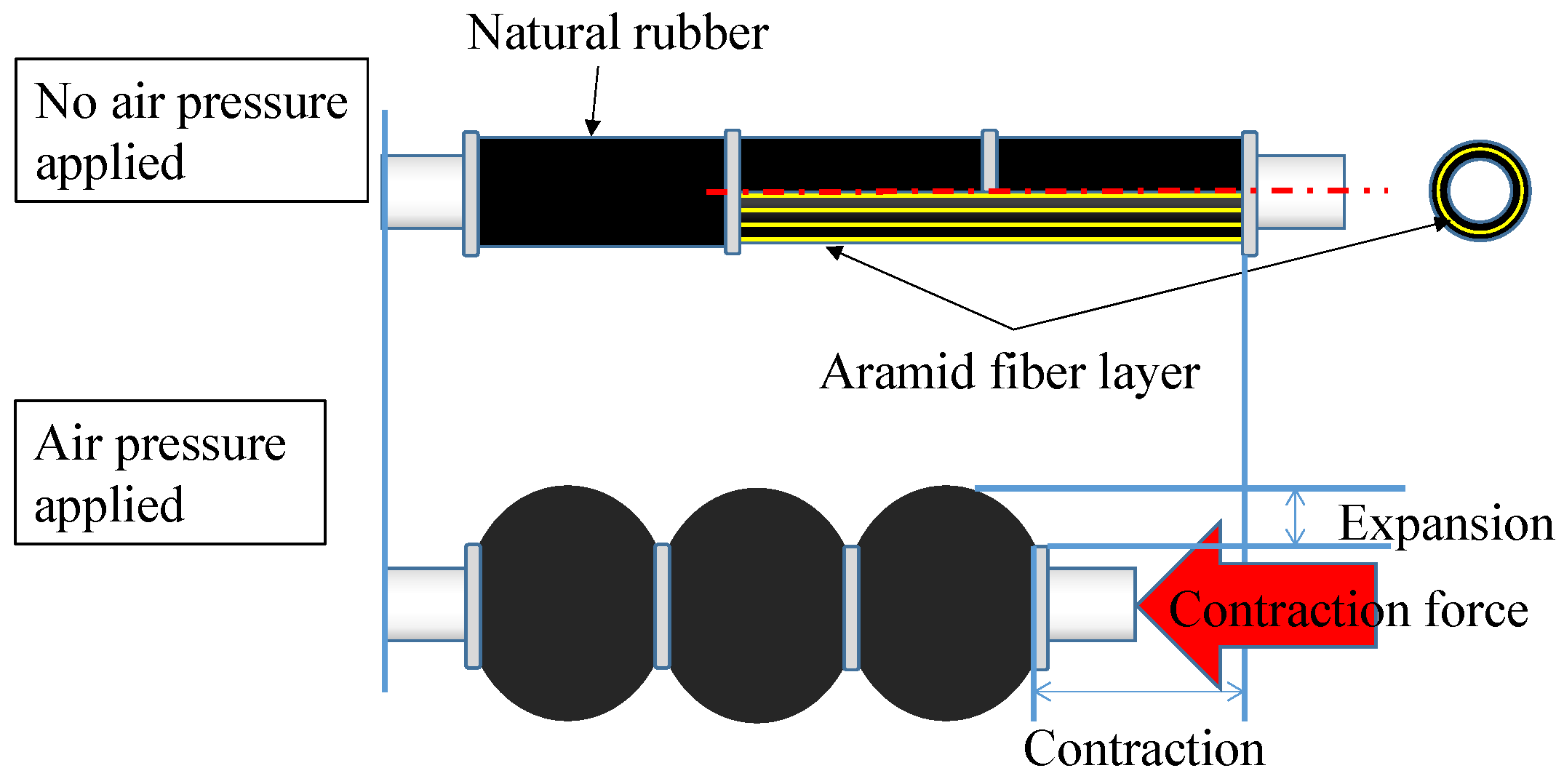
2.1.1. Straight-Fiber-Type Artificial Muscle
2.1.2. Short-Fiber-Reinforced Artificial Muscle
2.2. Fabrication of Short-Fiber-Reinforced Rubber and Short-Fiber-Reinforced Artificial Muscle
3. Experiment
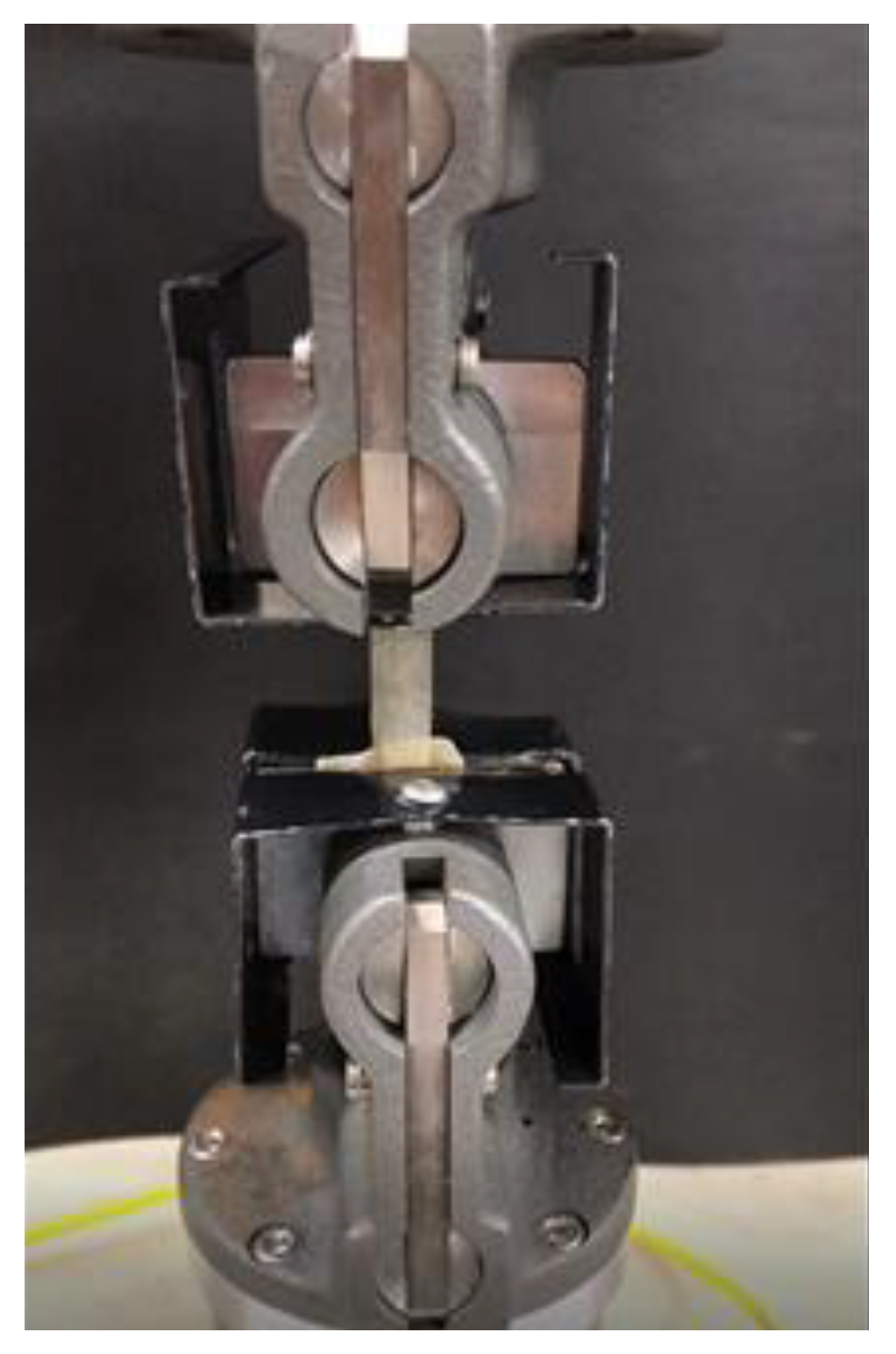
3.1. Anisotropy Evaluation for Short-Fiber-Reinforced Rubber Sheet
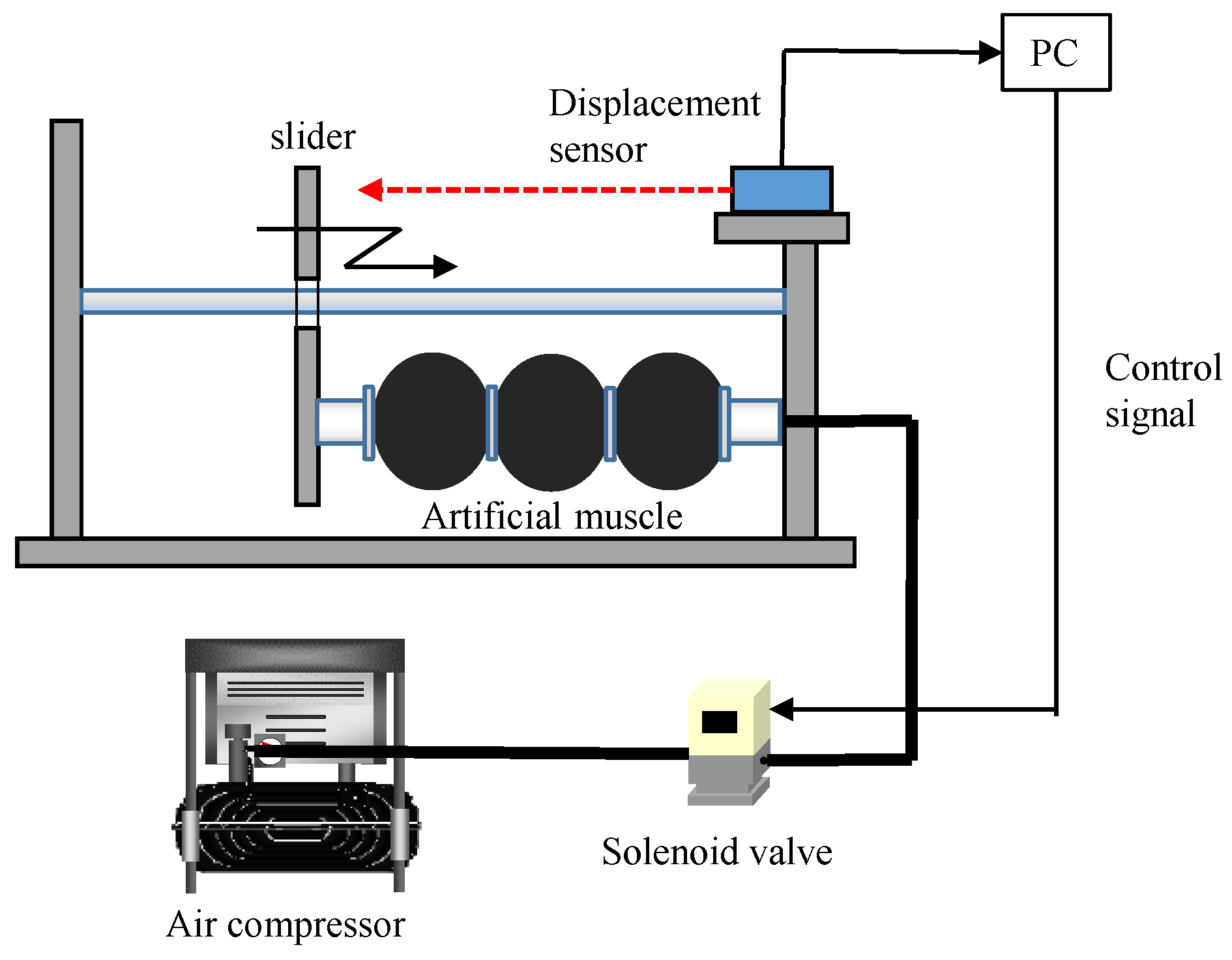
3.2. Evaluation of Contraction Ratio of Short-Fiber-Reinforced Artificial Muscle
4. Results and Discussion
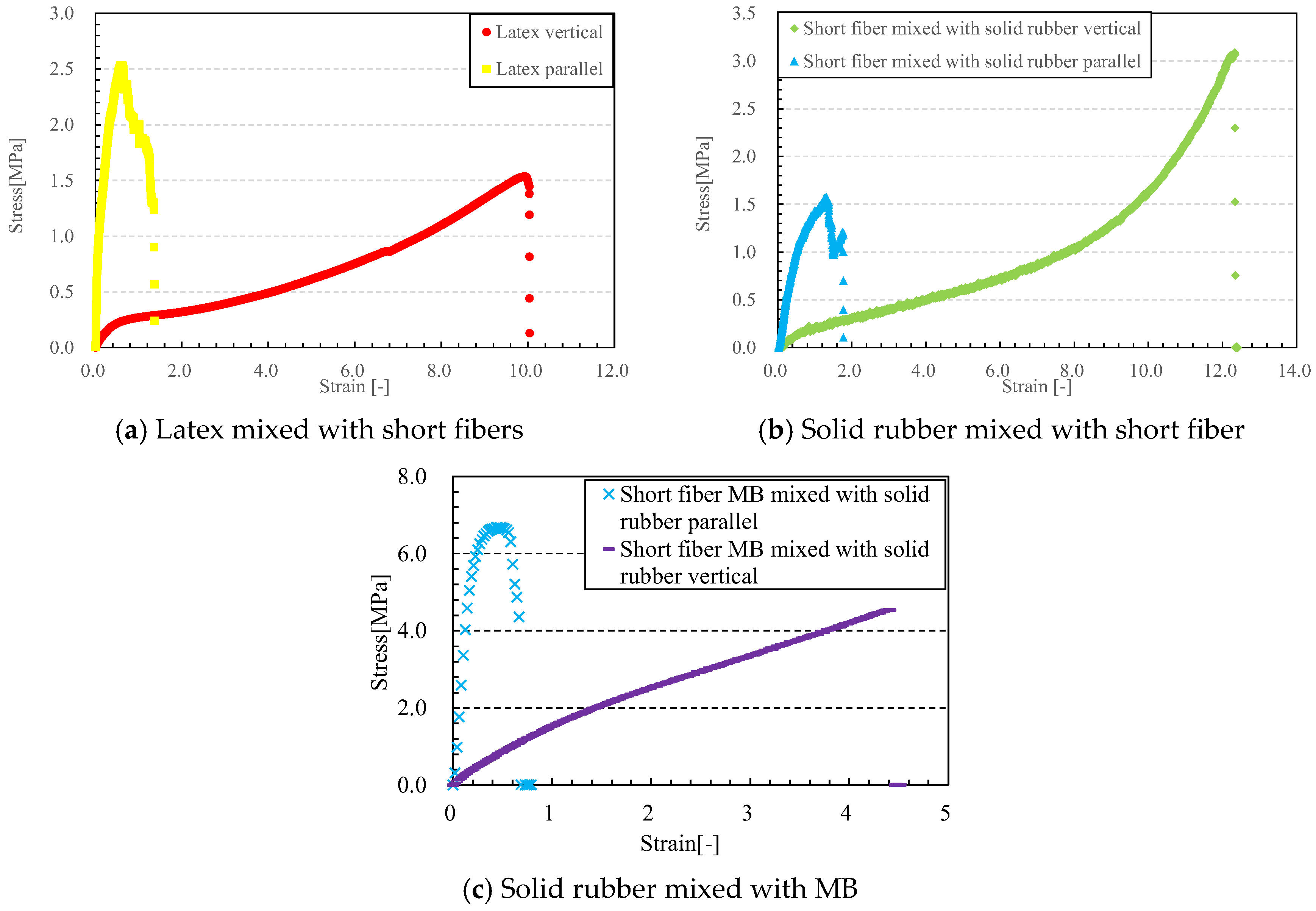
4.1. Anisotropy Evaluation Result of Short-Fiber-Reinforced Rubber Sheet
4.2. Evaluation Result of the Contraction Rate of Short-Fiber-Reinforced Artificial Muscle
5. Conclusions
- A short-fiber-reinforced rubber can be used as a material for the manufacture of axial fiber-reinforced artificial muscle.
- By orienting the short fibers on the rubber sheet, anisotropy can be expressed in the stress–strain characteristics.
- By fabricating an artificial muscle using short-fiber-reinforced rubber, it is possible to obtain contraction in the same way as the SF-ARM.
- The characteristics of the short-fiber-reinforced rubber sheet and artificial muscle depend on the mixing amount of short fibers, degree of orientation, and ratio of fiber diameter to length.
Author Contributions
Acknowledgments
Conflicts of Interest
Abbreviations
| NR | Natural rubber |
| SF-ARM | Straight-fiber-type artificial muscle |
| MB | Master batch |
References
- Okui, M.; Iikawa, S.; Yamada, Y.; Nakamura, T. Fundamental characteristic of novel actuation system with variable viscoelastic joints and MR clutches for human assistance. J. Intell. Mater. Syst. Struct. 2017, 29, 82–90. [Google Scholar] [CrossRef]
- Chou, C.P.; Hannaford, B. Measurement and modeling of McKibben pneumatic artificial muscles. IEEE Trans. Robot. Autom. 1996, 12, 90–102. [Google Scholar] [CrossRef]
- Tomori, H.; Nakamura, T. Theoretical Comparison of McKibben-Type Artificial Muscle and Novel Straight-Fiber-Type Artificial Muscle. Int. J. Autom. Technol. (IJAT) 2011, 5, 544–550. [Google Scholar] [CrossRef]
- Suzuki, R.; Okui, M.; Iikawa, S.; Yamada, Y.; Nakamura, T. Novel Feedforward Controller for Straight-Fiber-Type Artificial Muscle Based on an Experimental Identification Model. In Proceedings of the 2018 IEEE International Conference on Soft Robotics (RoboSoft), Livorno, Italy, 24–28 April 2018. [Google Scholar]
- Tian, M.; Cheng, L.; Liang, W.; Zhang, L. The Anisotropy of Fibrillar Silicate/Rubber Nanocomposites. Macromol. Mater. Eng. 2005, 290, 681–687. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Sample | A | B | C |
|---|---|---|---|
| Rubber | Natural rubber (NR) latex | NR solid | NR solid |
| Fiber | Aramid | Carbon | Aramid |
| Fiber length [mm] | 30 | 3 | 1–2 |
| Fiber content [phr] | 5 | 2 | 12 |
| Rubber sheet manufacturing method | 1. Arrange the fibers in latex 2. Dry to make a sheet | 1. Dissolve NR in toluene 2. Mix CB fibers 3. Align by shaking 4. Dry to make a sheet 5. Heat (140 °C × 30 min) | 1. Mix master batch (MB) with NR 2. Sheet using open roll 3. Heat (150 °C × 20 min) |
| Appearance of short-fiber-reinforced rubber sheet |  |  |  |
| Artificial muscle manufacture- -ng method | 1. Apply latex to a core with an inner diameter of 10 mm and dry to make an inner rubber tube 2. Arrange the aramid fibers in the inner rubber tube 3. Apply latex to the outer layer of the fiber layer and dry to make an outer-layer rubber tube | 1. Wrap a rubber sheet around the core and vulcanize 2. Wrap a fiber-reinforced-rubber sheet and vulcanize 3. Wrap a rubber sheet and vulcanize | 1. Wrap a fiber-reinforced rubber sheet around the core 2. Vulcanize |
| Appearance of short-fiber-reinforced artificial muscle |  |  |  |
| Sample | A | B | C | Without Fiber |
|---|---|---|---|---|
| Vertical [MPa] | 0.2 | 0.2 | 1.1 | 0.75 |
| Parallel [MPa] | 3.1 | 1.3 | 14 | 0.75 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kojima, A.; Okui, M.; Nakamura, T. Development of Soft Pneumatic Actuators Using High-Strain Elastic Materials with Stress Anisotropy of Short Fibers. Proceedings 2020, 64, 41. https://doi.org/10.3390/IeCAT2020-08526
Kojima A, Okui M, Nakamura T. Development of Soft Pneumatic Actuators Using High-Strain Elastic Materials with Stress Anisotropy of Short Fibers. Proceedings. 2020; 64(1):41. https://doi.org/10.3390/IeCAT2020-08526
Chicago/Turabian StyleKojima, Akihiro, Manabu Okui, and Taro Nakamura. 2020. "Development of Soft Pneumatic Actuators Using High-Strain Elastic Materials with Stress Anisotropy of Short Fibers" Proceedings 64, no. 1: 41. https://doi.org/10.3390/IeCAT2020-08526
APA StyleKojima, A., Okui, M., & Nakamura, T. (2020). Development of Soft Pneumatic Actuators Using High-Strain Elastic Materials with Stress Anisotropy of Short Fibers. Proceedings, 64(1), 41. https://doi.org/10.3390/IeCAT2020-08526