Force Amplification Mechanism for Increased Stroke and Speed Responses of Piezoelectric Stick-Slip Miniaturized Linear Motor †

{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Methods
2.1. New Design Methodology Approach
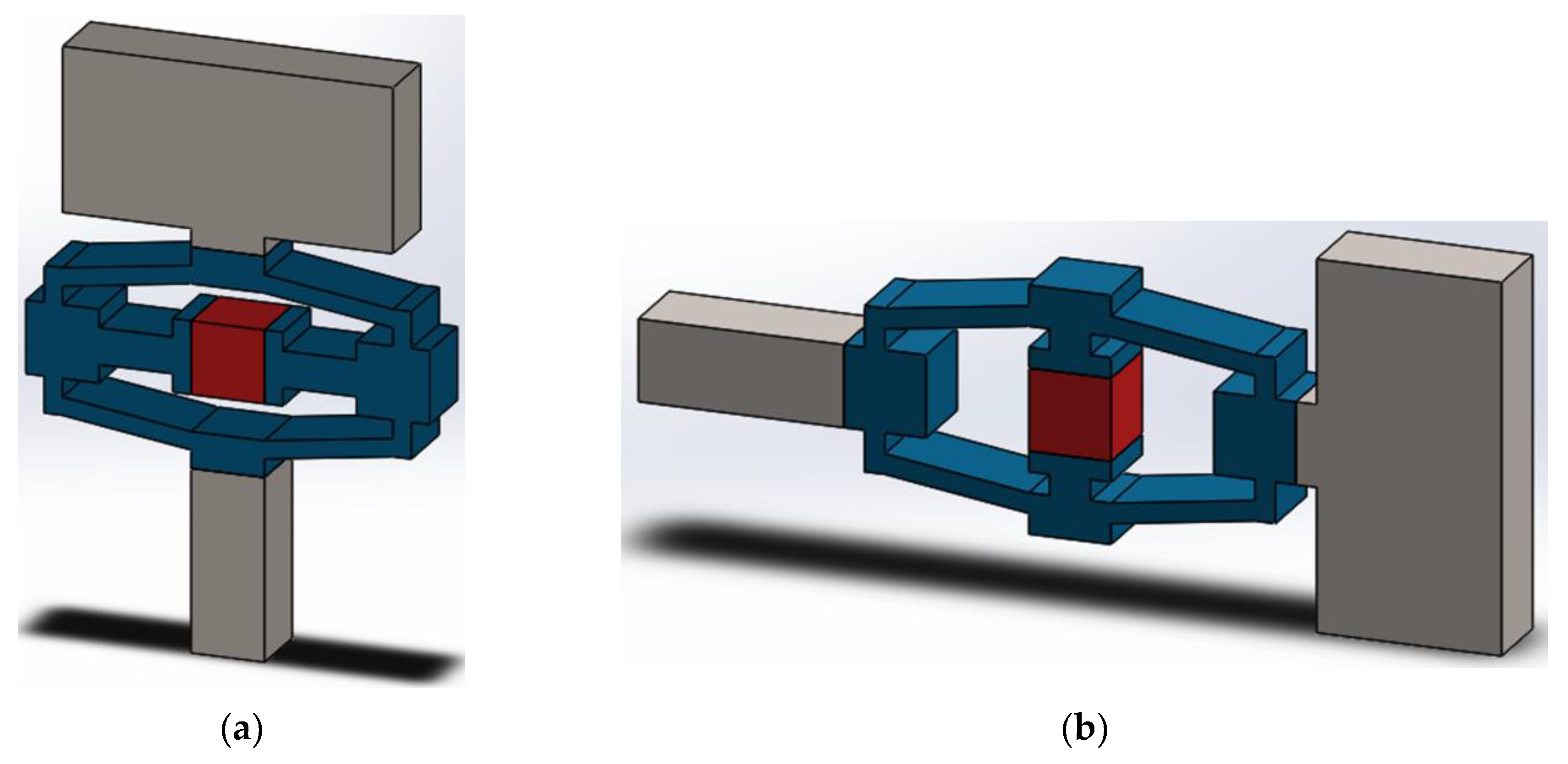
2.2. Structural Design
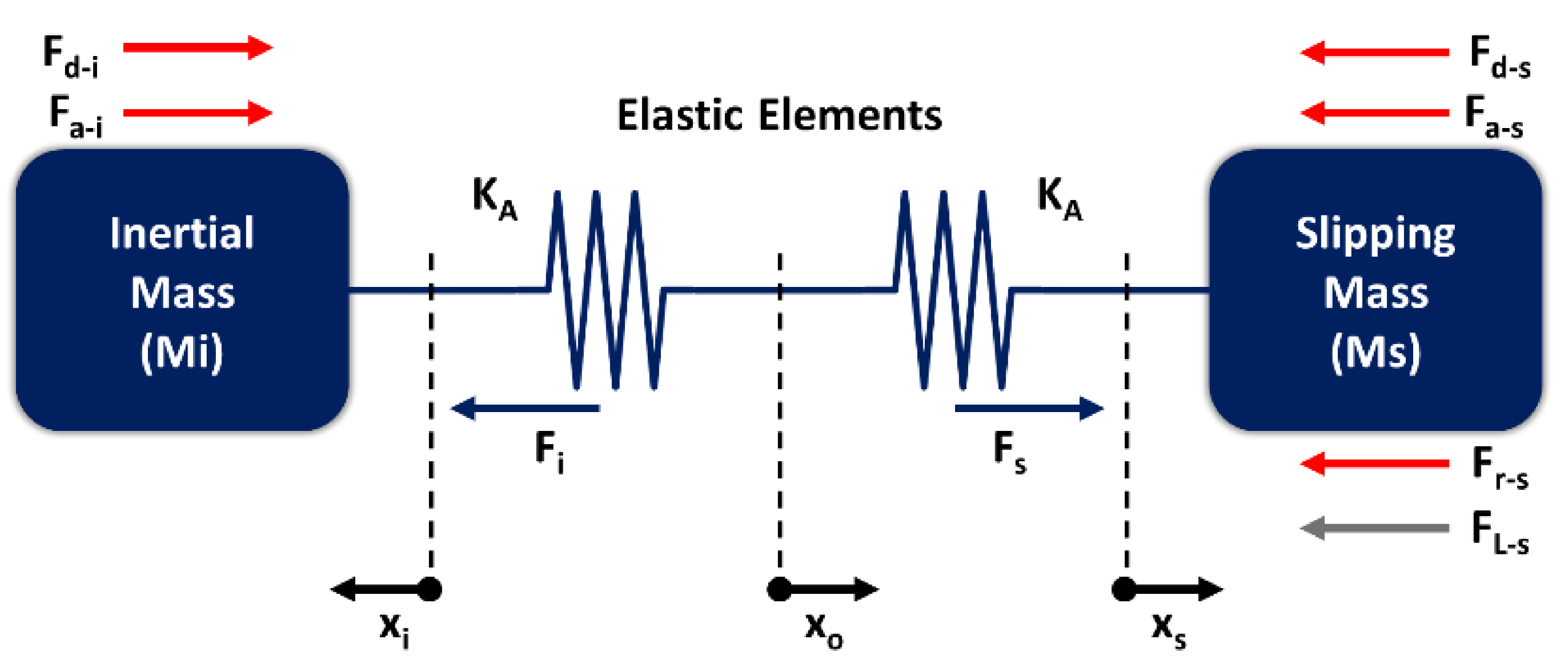
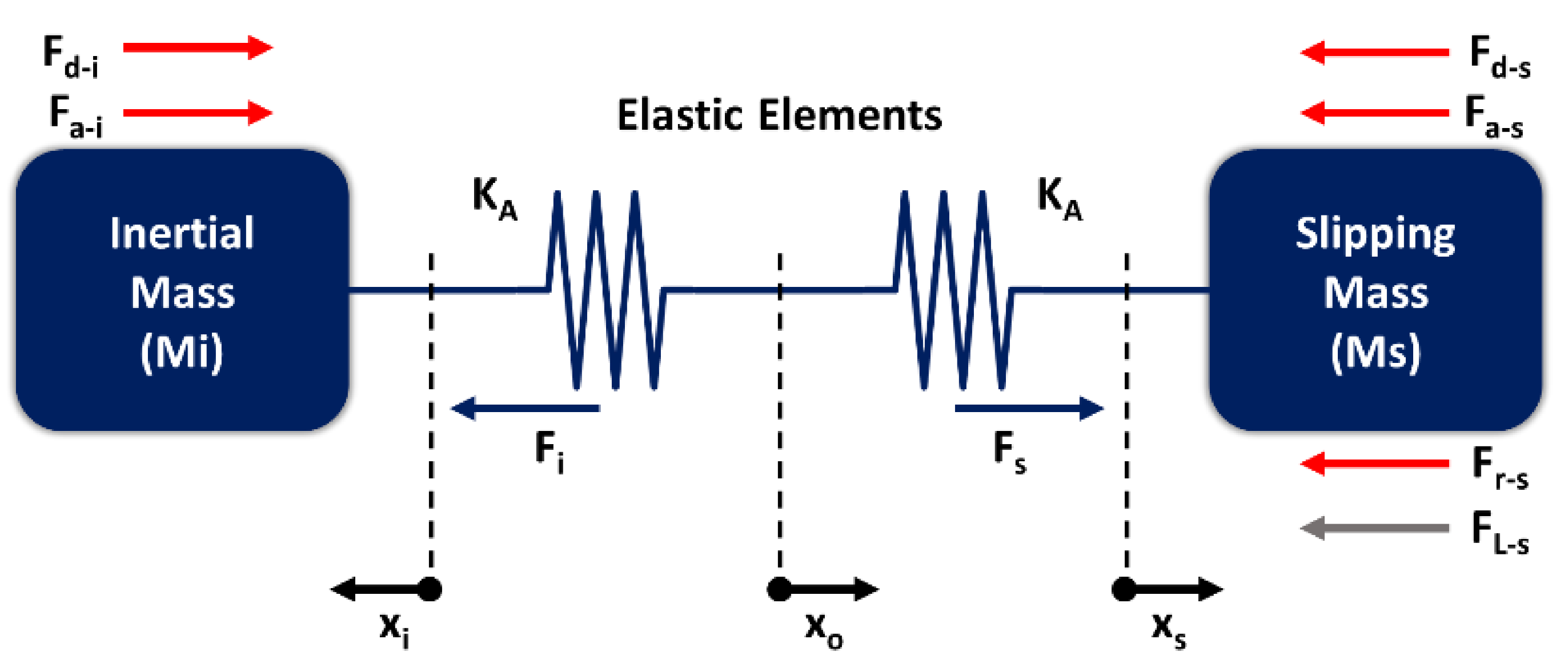
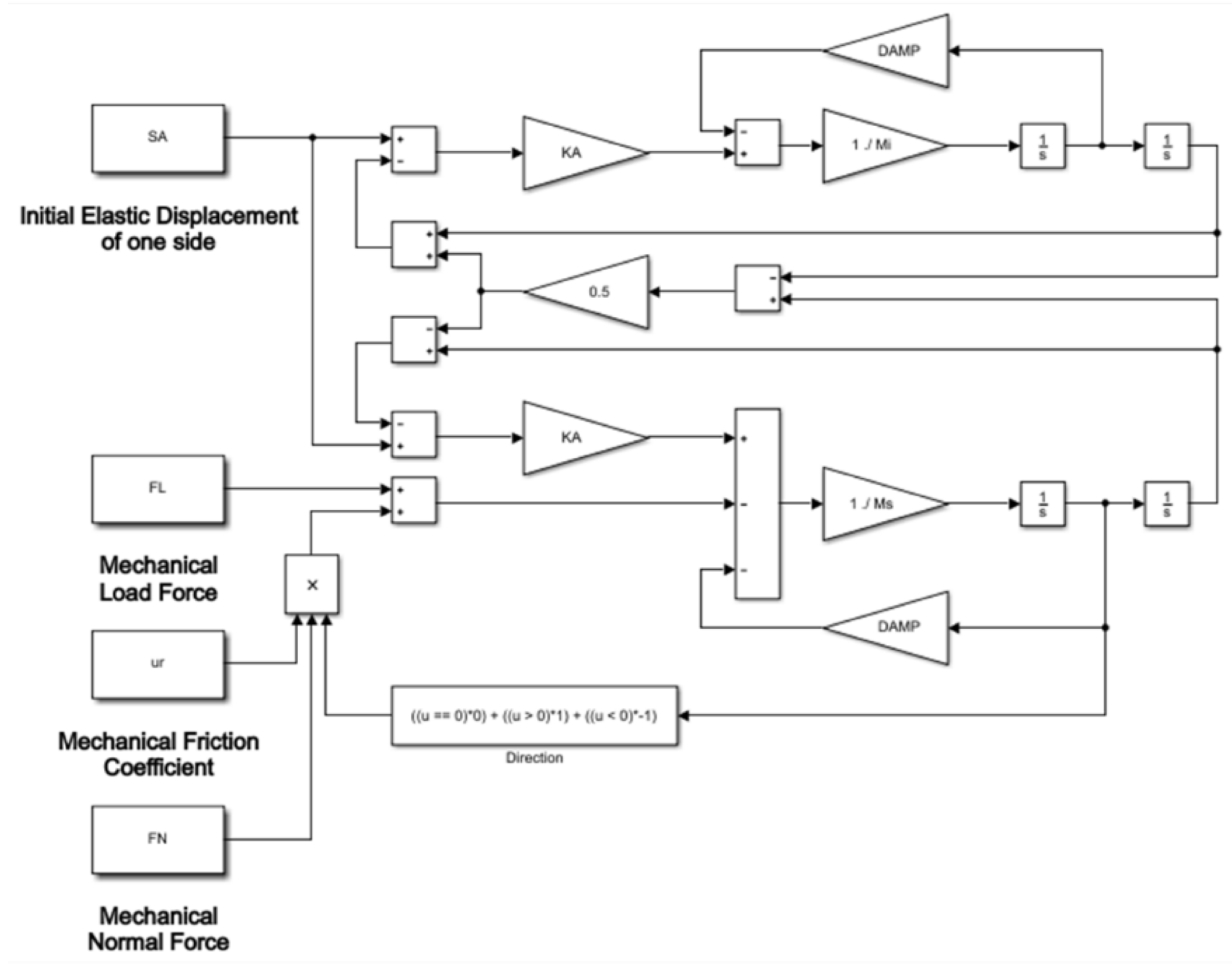
2.3. System Modelling and Boundary Conditions
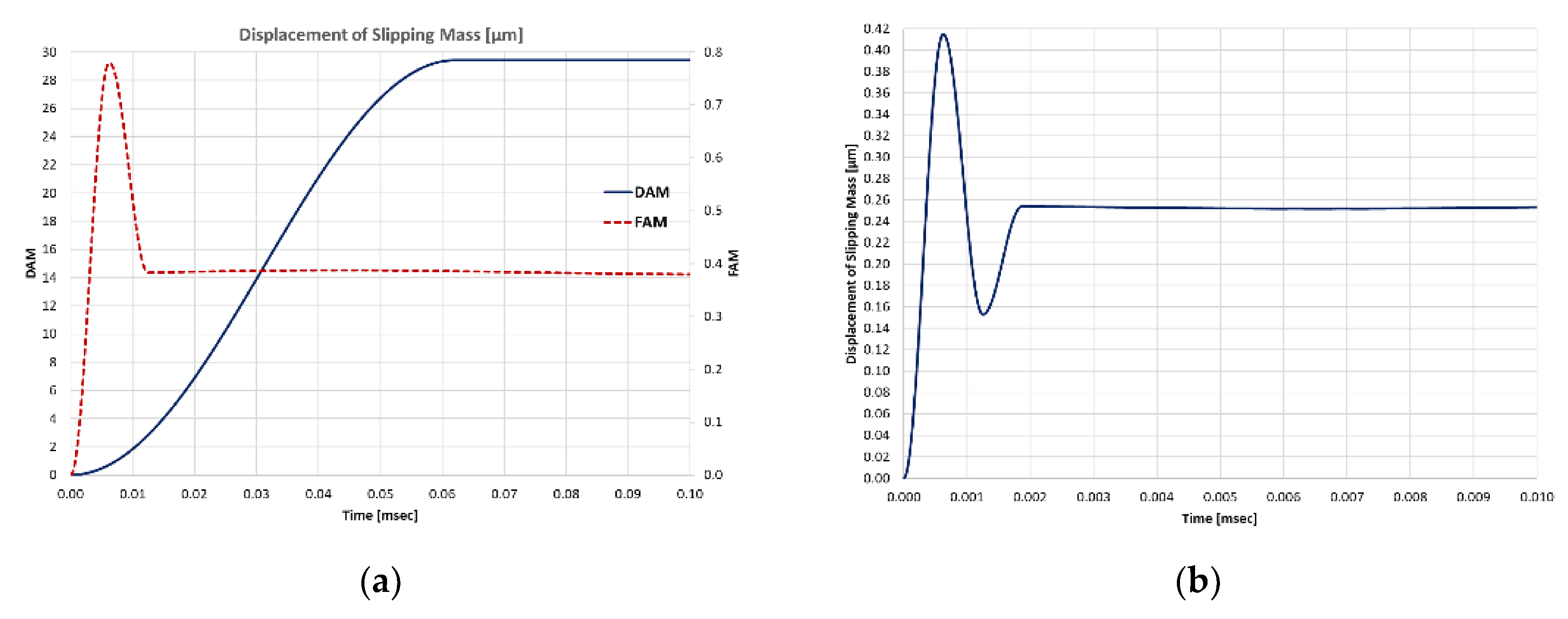
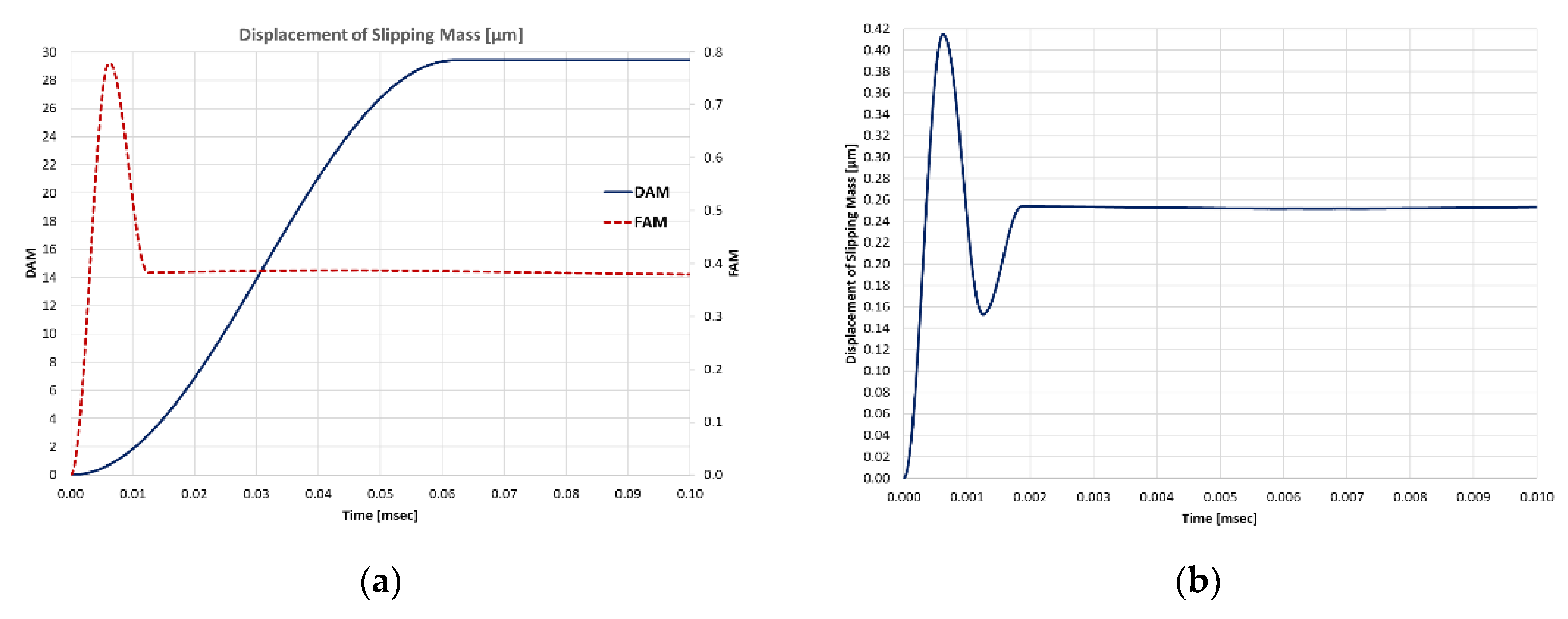
3. Results and Discussion
4. Conclusions
Acknowledgments
Conflicts of Interest
References
- Hunstig, M. Piezoelectric Inertia Motors—A Critical Review of History, Concepts, Design, Applications, and Perspectives. Actuators 2017, 6, 7. [Google Scholar] [CrossRef]
- Huang, W.; Sun, M. A Design, Analysis, and Experiment on a Novel Stick-Slip Piezoelectric Actuator with a Lever Mechanism. Micromachines 2019, 10, 863. [Google Scholar] [CrossRef]
- Lu, X.; Gao, Q.; Li, Y.; Zhang, X.; Qiao, G.; Cheng, T. A Linear Piezoelectric Stick-Slip Actuator via Triangular Displacement Amplification Mechanism. IEEEA Access 2020, 8, 6515–6522. [Google Scholar] [CrossRef]
- Ragonet, M.; Petiniot, J.-L.; Fournier, M.; Porchez, T.; Sosnicki, O.; Bouchet, C. Potentialities of APA Composite Shell Actuators and SA75D Amplifier for New Dynamic Applications. In Proceedings of the 15th International Conference on New Actuators, Bremen, Germany, 13–15 June 2016. [Google Scholar]
- Guignabert, A.; Pages, A.; Freychet, O.; Barillot, F.; Stentz, J.; Belly, C.; Maillard, T.; Claeyssen, F. Improvement of MSPA: Module of Stepping Piezo Actuator. In Proceedings of the 16th International Conference on New Actuators, Bremen, Germany, 25–27 June 2018. [Google Scholar]
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kloub, H. Force Amplification Mechanism for Increased Stroke and Speed Responses of Piezoelectric Stick-Slip Miniaturized Linear Motor. Proceedings 2020, 64, 17. https://doi.org/10.3390/IeCAT2020-08518
Kloub H. Force Amplification Mechanism for Increased Stroke and Speed Responses of Piezoelectric Stick-Slip Miniaturized Linear Motor. Proceedings. 2020; 64(1):17. https://doi.org/10.3390/IeCAT2020-08518
Chicago/Turabian StyleKloub, Hussam. 2020. "Force Amplification Mechanism for Increased Stroke and Speed Responses of Piezoelectric Stick-Slip Miniaturized Linear Motor" Proceedings 64, no. 1: 17. https://doi.org/10.3390/IeCAT2020-08518
APA StyleKloub, H. (2020). Force Amplification Mechanism for Increased Stroke and Speed Responses of Piezoelectric Stick-Slip Miniaturized Linear Motor. Proceedings, 64(1), 17. https://doi.org/10.3390/IeCAT2020-08518