Robotic Arms with Anthropomorphic Grippers for Robotic Technological Processes †

Abstract
:1. Introduction
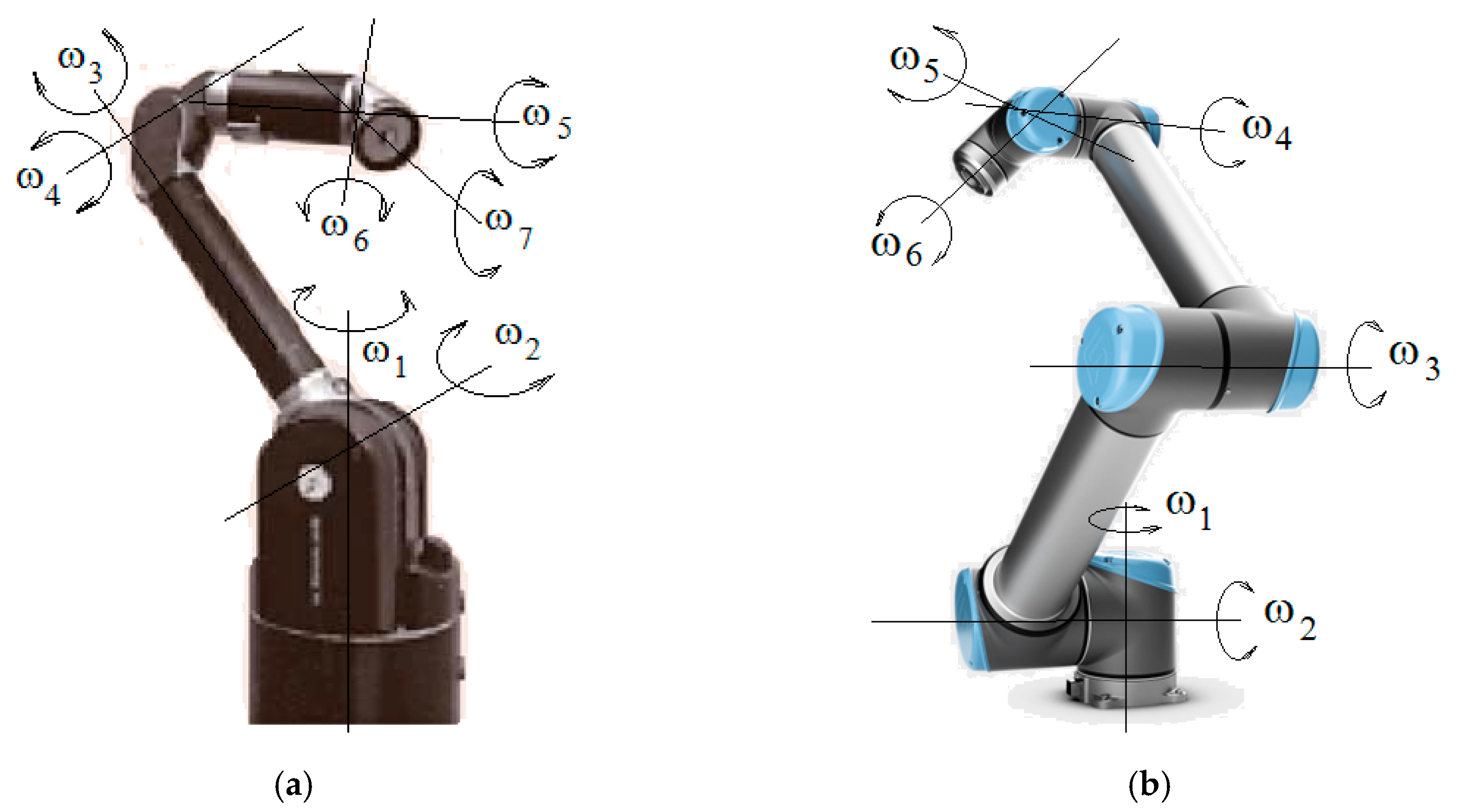
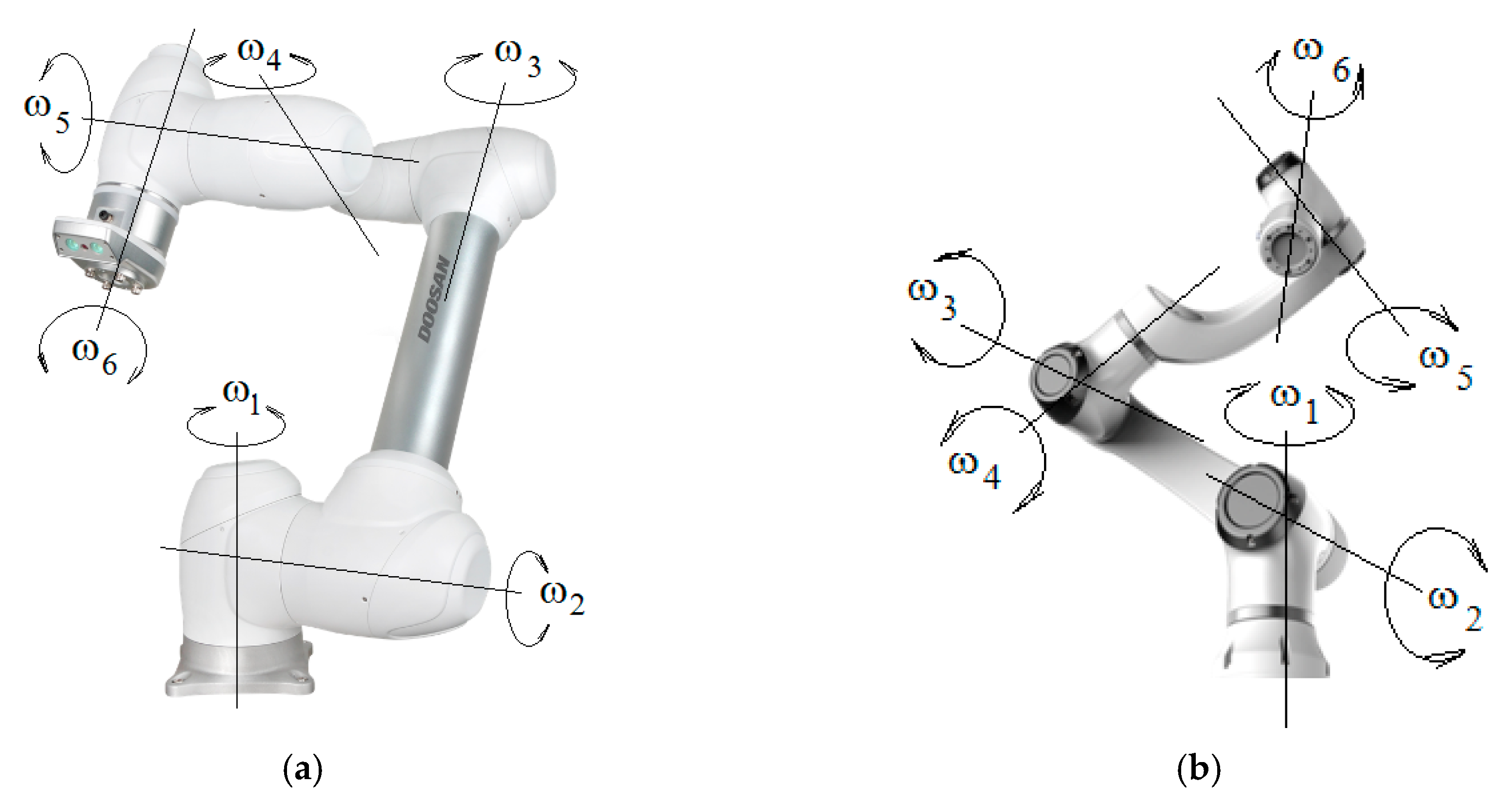
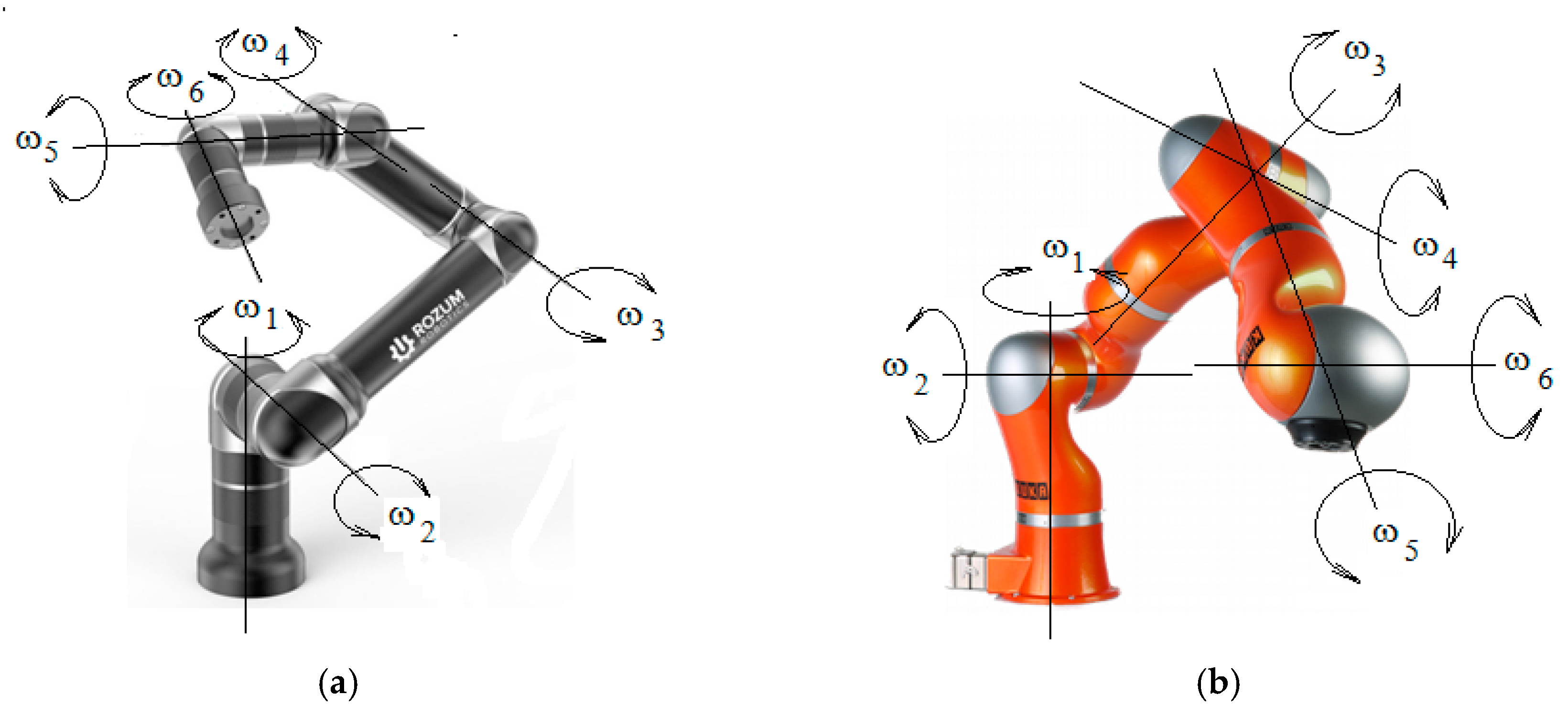
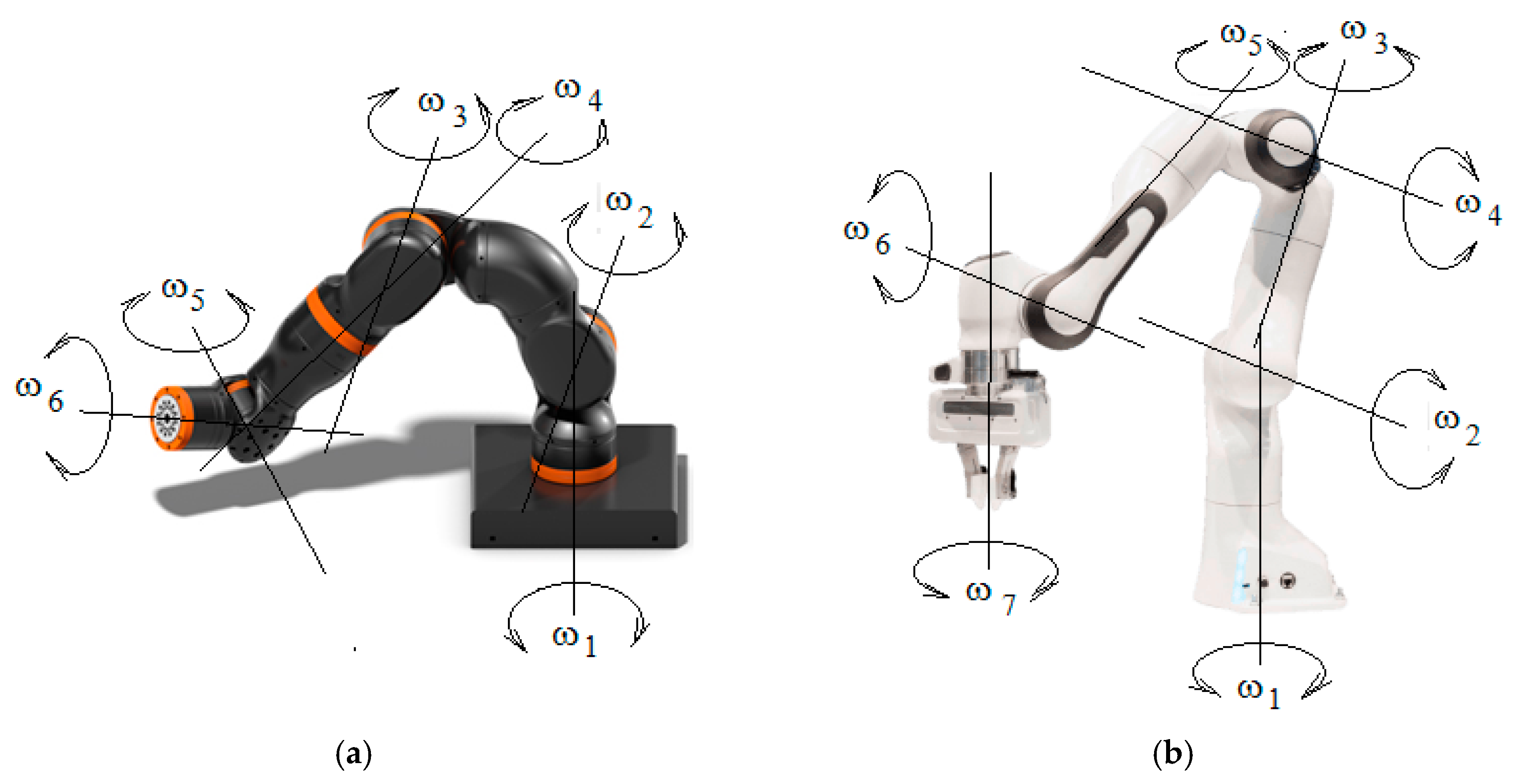
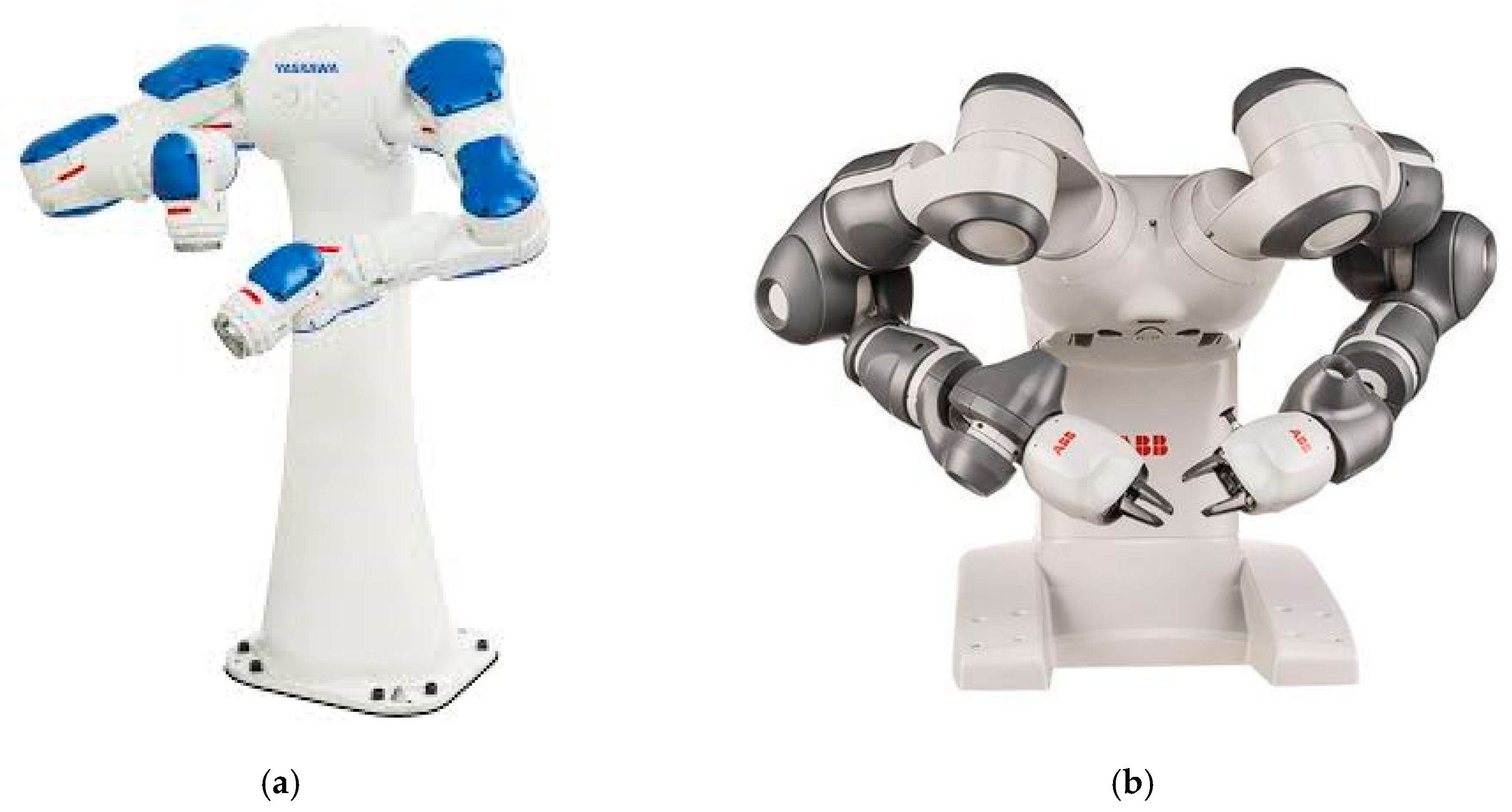
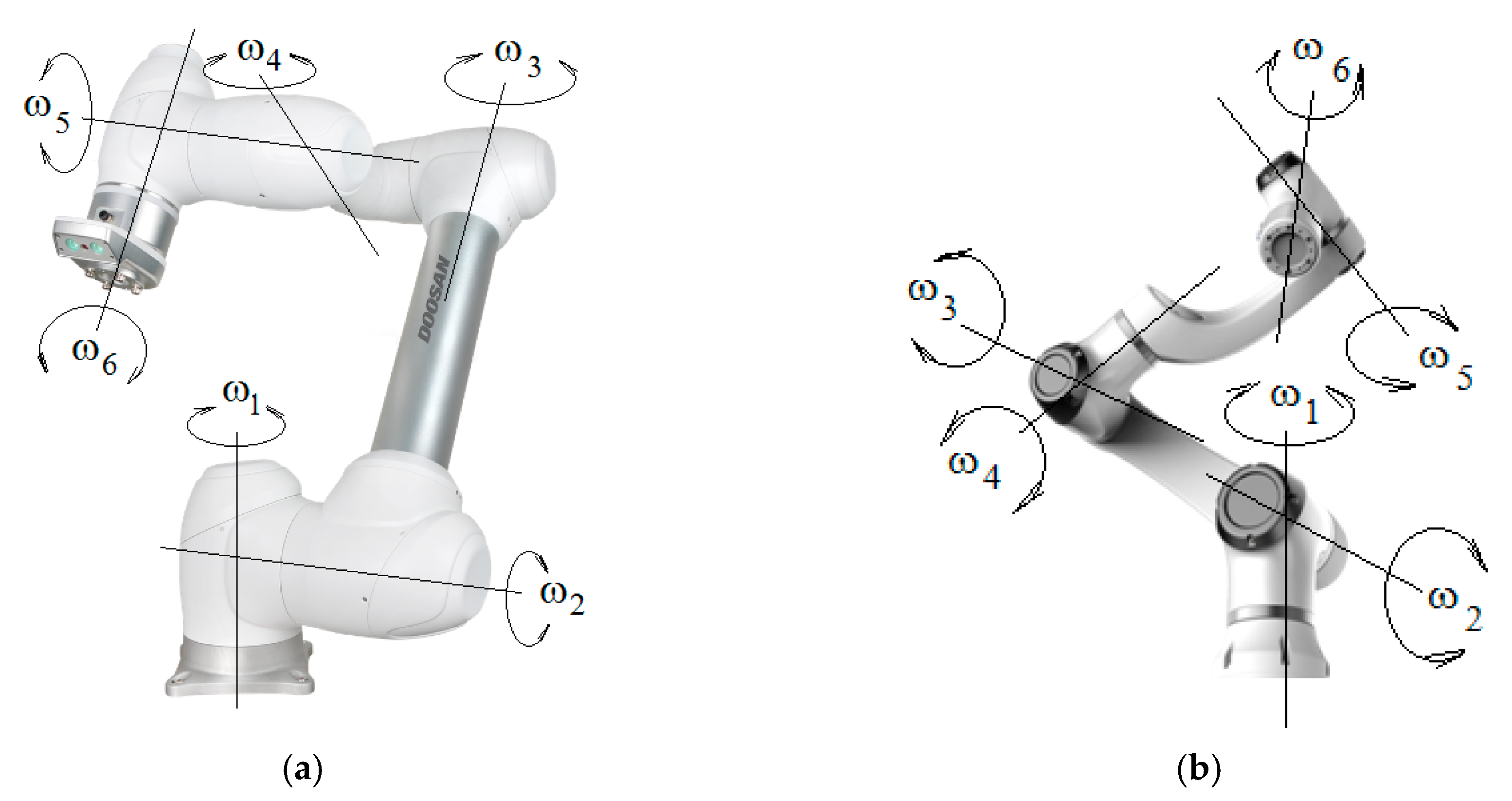
2. Types of Collaborative Robotic Arms
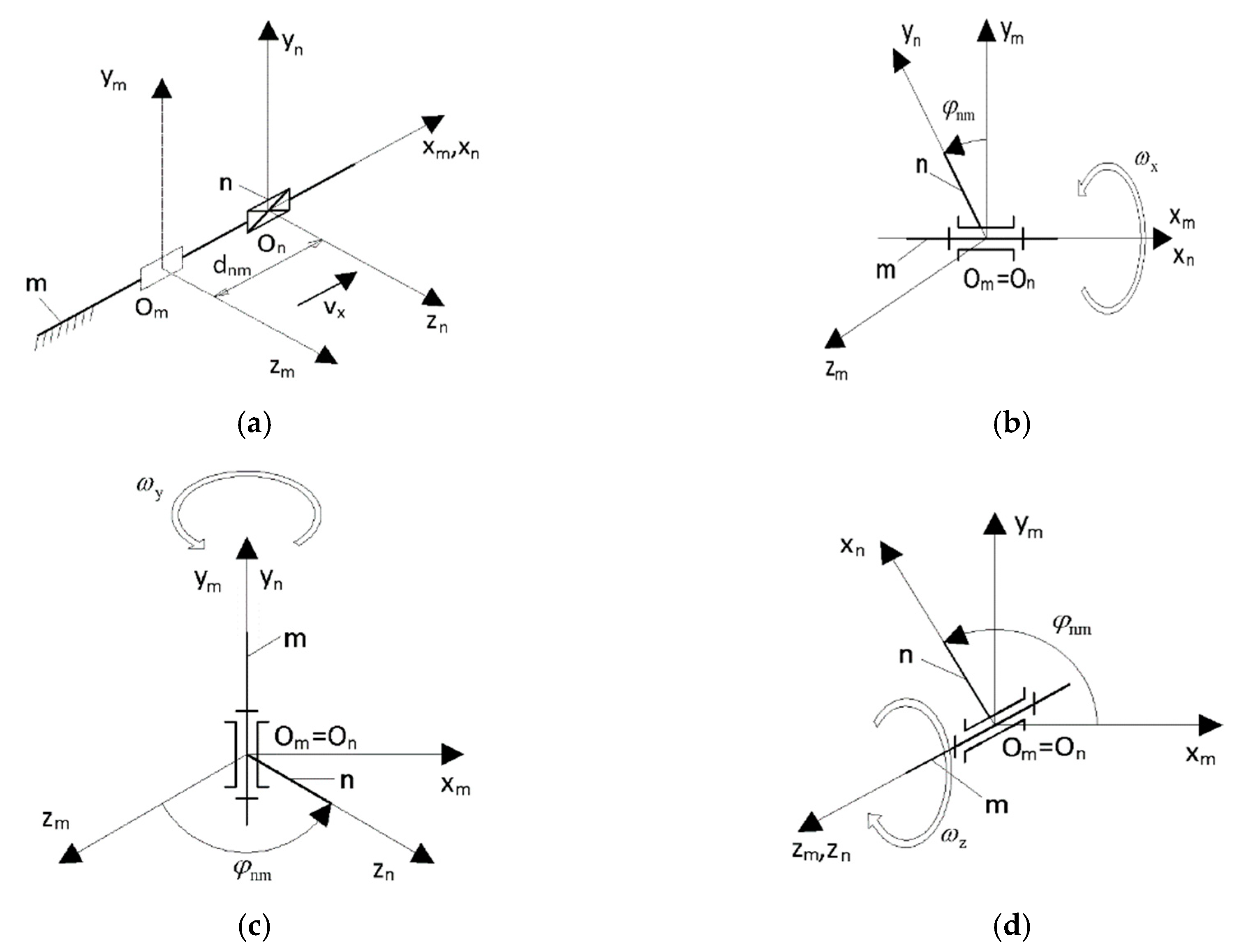
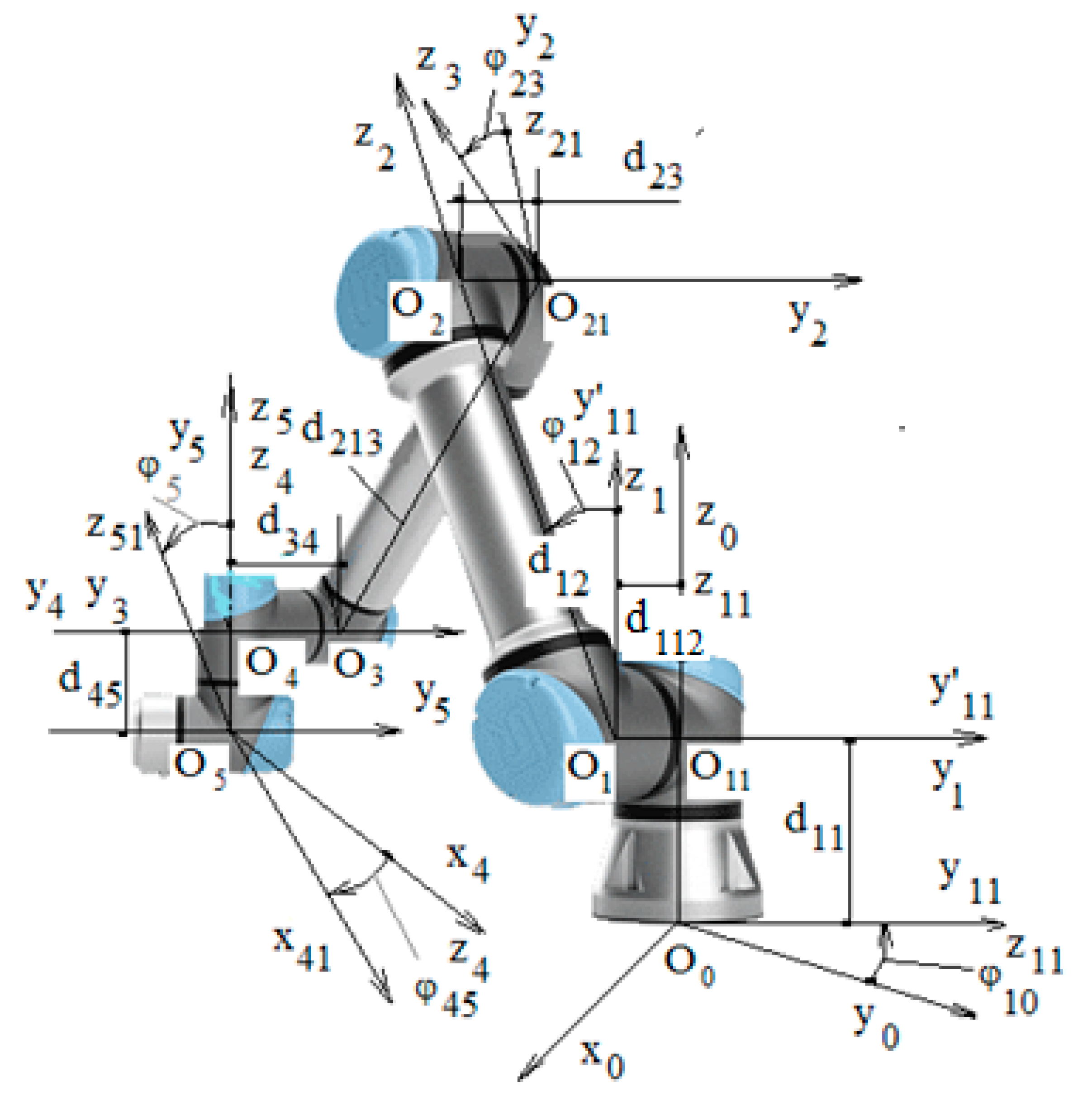
3. Solving the Direct Kinematic Problem with the Method of Homogeneous Operators
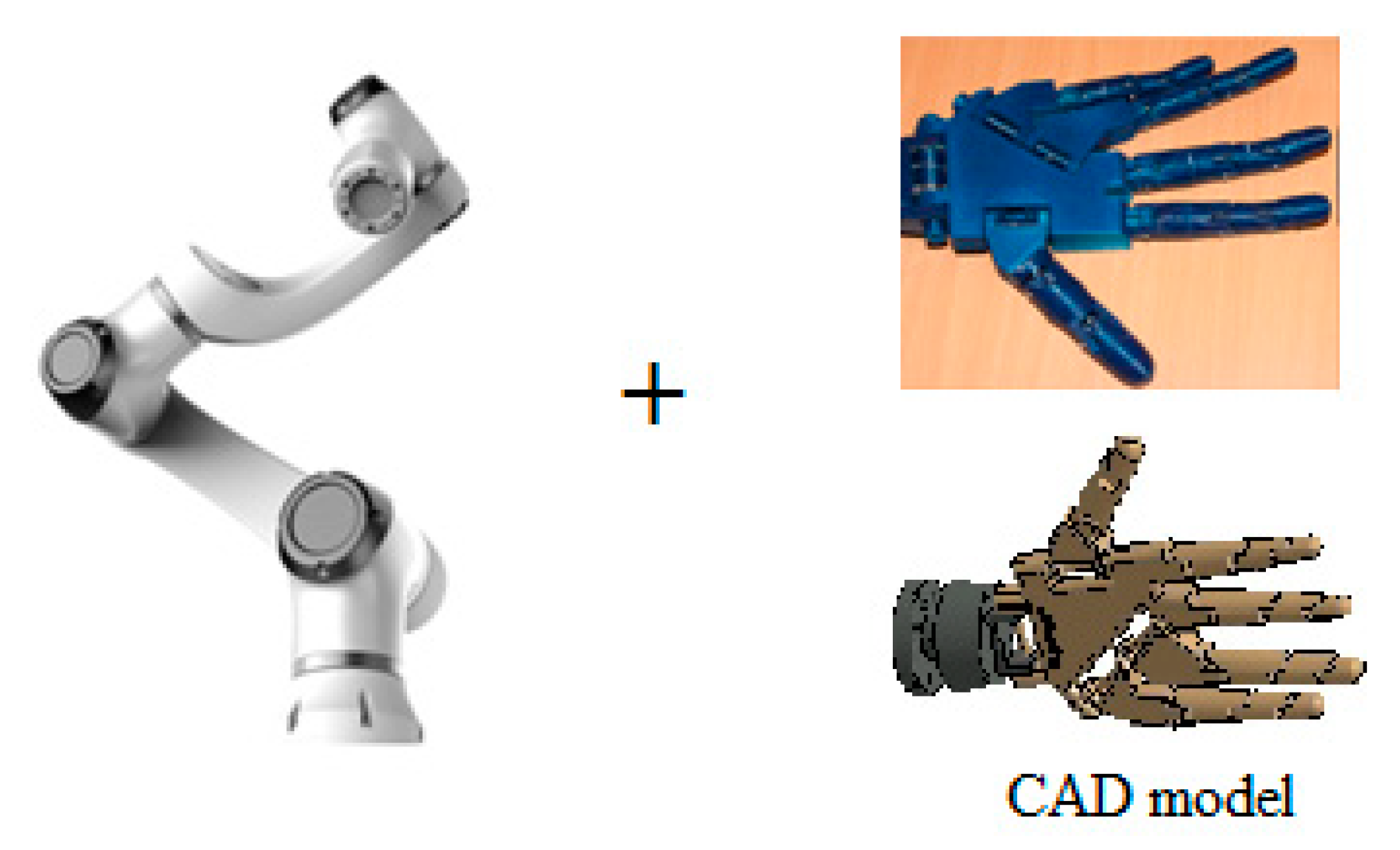
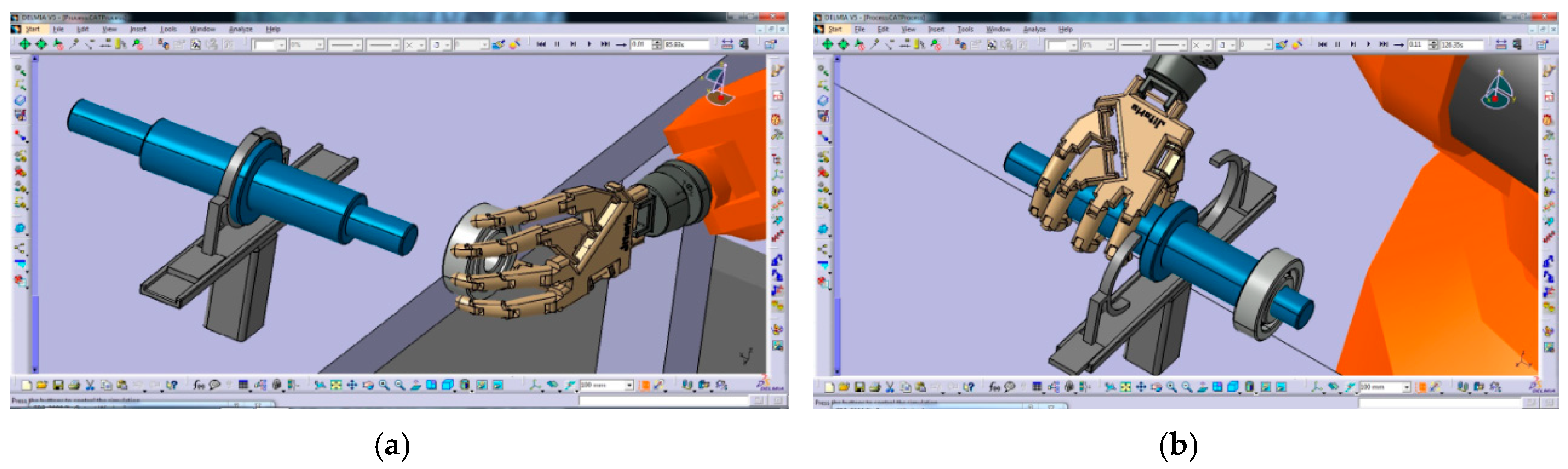
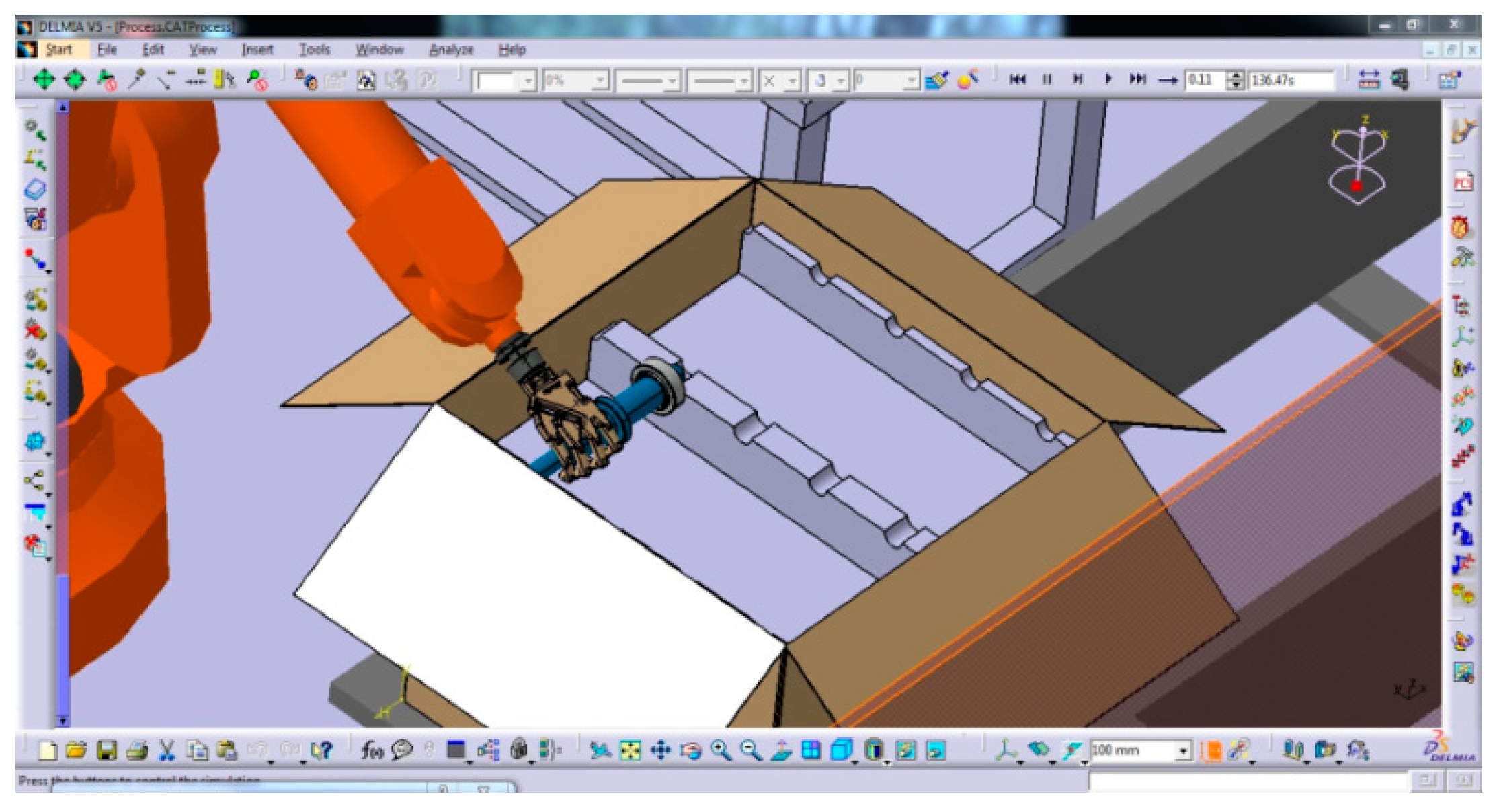
4. Five-Finger Anthropomorphic Gripper for Robotic Arms
5. Conclusions
- Human arm type robotic arms, also called collaborative robots or cobots if their shapes are more complex, have greatly improved and diversified in recent times; even one of the big companies brought to market industrial robots and such structures.
- These robotic arms, more efficient than the robotic arms from the traditional industrial robots, are further equipped especially with jaw grippers of the pliers type that do not highlight all their constructive and operational possibilities.
- The maximum efficiency of collaborative robotic arms use can be achieved by equipping them with anthropomorphic grippers, still difficult to access because of high costs, and a sometimes unnecessary complexity;
- As an alternative to the familiar anthropomorphic gripper, to equip robotic arms, I briefly present an anthropomorphic gripper with five fingers, sufficiently advanced and feasible at a lower cost, made under my supervision, including a solution for coupling a robotic arm, and exemplification of use in the case of assembly and transfer operations; this is a solution that has advantages in terms of cost and operation for current applications compared to other very expensive and unjustifiably complex anthropomorphic grippers.
References
- Staretu, I. Gripping Systems; Derc Publishing House: Tewksbury, MA, USA, 2011. [Google Scholar]
- El Zaatari, S.; Marei, M.; Li, W.; Usman, Z. Cobot programming for collaborative industrial tasks: An overview. Rob. Auton. Syst. 2019, 116, 162–180. [Google Scholar] [CrossRef]
- Schou, C.; Andersen, R.S.; Chrysostomou, D.; Bøgh, S.; Madsen, O. Skill-based instruction of collaborative robots in industrial settings. Robot. Comput. Integr. Manuf. 2018, 53, 72–80. [Google Scholar] [CrossRef]
- Robots Your Guide to the World of Robotics. Available online: https://robots.ieee.org/robots/wam/ (accessed on 24 April 2020).
- Automation Distribution! Available online: https://automationdistribution.com/universal-robots-ur10-collaborative-industrial-robot-arm/ (accessed on 26 April 2020).
- Generation Robots. Available online: https://www.generationrobots.com/en/403413-doosan-m1013-robotic-arm.html (accessed on 20 April 2020).
- Made-in-China. Available online: https://www.made-in-china.com/showroom/hansrobot/product–detailoCKEAfvTEScF/China-6-Axis-Universal-Robot-for-Pick-and-Place-Competitor-Price.html (accessed on 20 April 2020).
- ROZUM ROBOTICS. Available online: https://www.f6s.com/rozumrobotics (accessed on 26 April 2020).
- Laurens, A.; Khoramshahi, M.; Billard, A. Adaptive Human-Robot Interaction: From Human Intention to Motion Adaptation Using Parameterized Dynamical Systems; Technical Report; Ecole Polytechnique Federal de Lausanne: Lausanne, Switzerland, 2018. [Google Scholar]
- IGUS Plastics for Longer Life. Available online: https://www.igus.ro/info/news-2018-20852 (accessed on 24 April 2020).
- TIME-BEST INVETION 2018. Available online: https://time.com/collection/best-inventions-2018/5454734/panda/ (accessed on 24 April 2020).
- YASKAWA. Available online: https://www.yaskawa.eu.com/products/robots (accessed on 20 June 2020).
- ABB. Available online: https://new.abb.com/products/robotics/industrial-robots/irb-14000-yumi (accessed on 20 June 2020).
- Dudita, F.; Diaconescu, D.; Gogu, G. Linkages Mechanisms (in Romanian); Editura Tehnica: Bucharest, Romania, 1989. [Google Scholar]
- Staretu, I. The Structure, Work Space and Direct Kinematic of the Robots with 8 Axes of Type T Normal R Parallel (PM) (OM). Appl. Mech. Mater. 2014, 658, 718–723. [Google Scholar] [CrossRef]
- Moldovan, C. Theoretical and Experimental Researches Regarding the Diversification of a Virtual Hand Interaction with Objects from a Virtual World with Applications in Industrial Engineering (in Romanian). Ph.D. Thesis, Transilvania University of Brasov, Brasov, Romania, 2014. [Google Scholar]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}


Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Staretu, I. Robotic Arms with Anthropomorphic Grippers for Robotic Technological Processes. Proceedings 2020, 63, 77. https://doi.org/10.3390/proceedings2020063077
Staretu I. Robotic Arms with Anthropomorphic Grippers for Robotic Technological Processes. Proceedings. 2020; 63(1):77. https://doi.org/10.3390/proceedings2020063077
Chicago/Turabian StyleStaretu, Ionel. 2020. "Robotic Arms with Anthropomorphic Grippers for Robotic Technological Processes" Proceedings 63, no. 1: 77. https://doi.org/10.3390/proceedings2020063077
APA StyleStaretu, I. (2020). Robotic Arms with Anthropomorphic Grippers for Robotic Technological Processes. Proceedings, 63(1), 77. https://doi.org/10.3390/proceedings2020063077