GNSS Interference Characterization and Localization Using OpenSky ADS-B Data †



Abstract
:1. Introduction
2. Materials and Methods
2.1. OpenSky ADS-B Data Processing
2.2. Interference Events Characterization
2.3. Interference Sources Localization
2.3.1. Assumptions
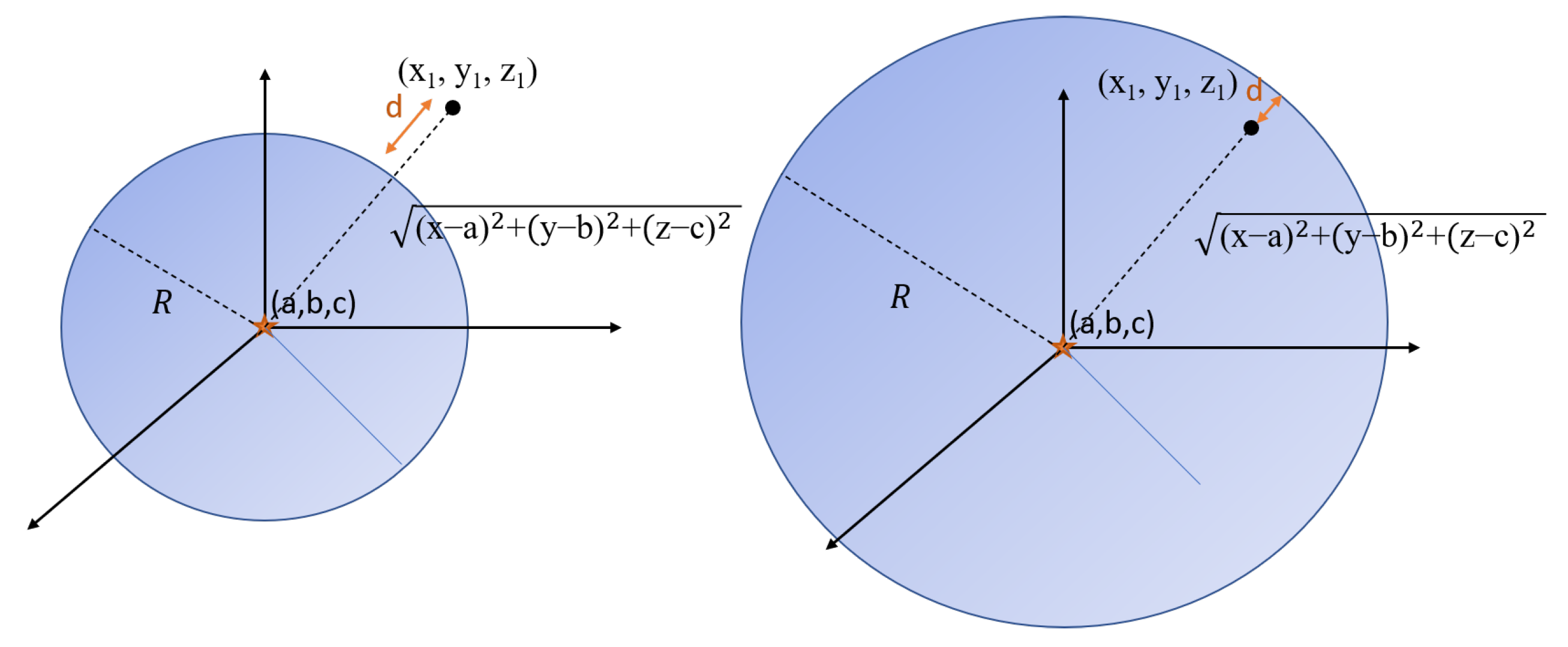
- This paper assumes the interference source radiates equally strong signal in all directions. The affected area of the interference source is modeled as a sphere.
- The RFI source is continuously emitting jamming signal and has a constant power over time. Therefore, the gaps in flight trajectory are direct results from aircraft entering the affected area. In addition, all aircraft at the same location should be affected by same power strength.
- The airspace has sufficient coverage by ADS-B ground receivers and the jamming signal of interference source is not blocked by mountains or buildings.
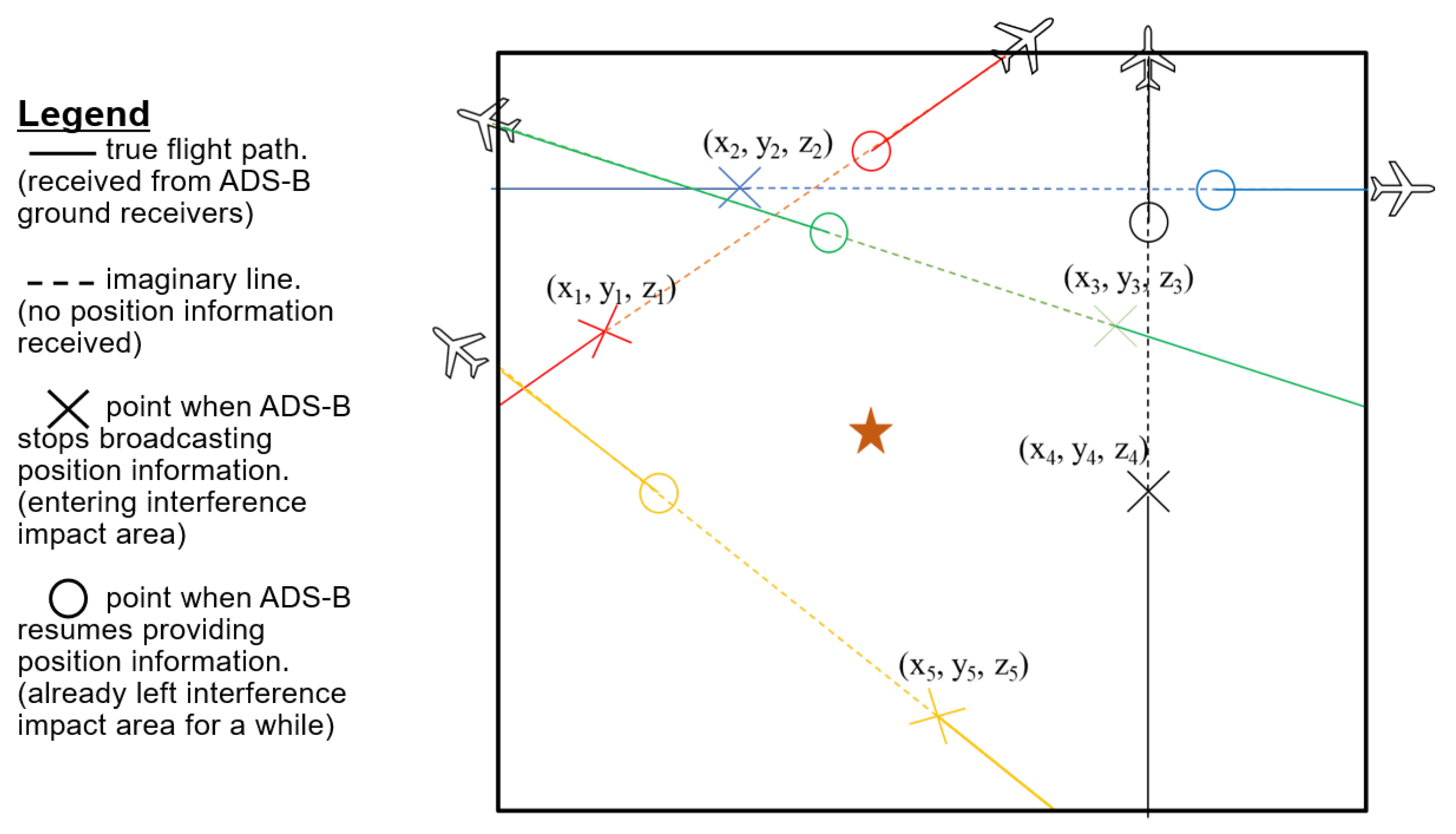
2.3.2. Impact of Interference Events
2.3.3. Calculation
3. Results
3.1. OpenSky ADS-B Data Processing
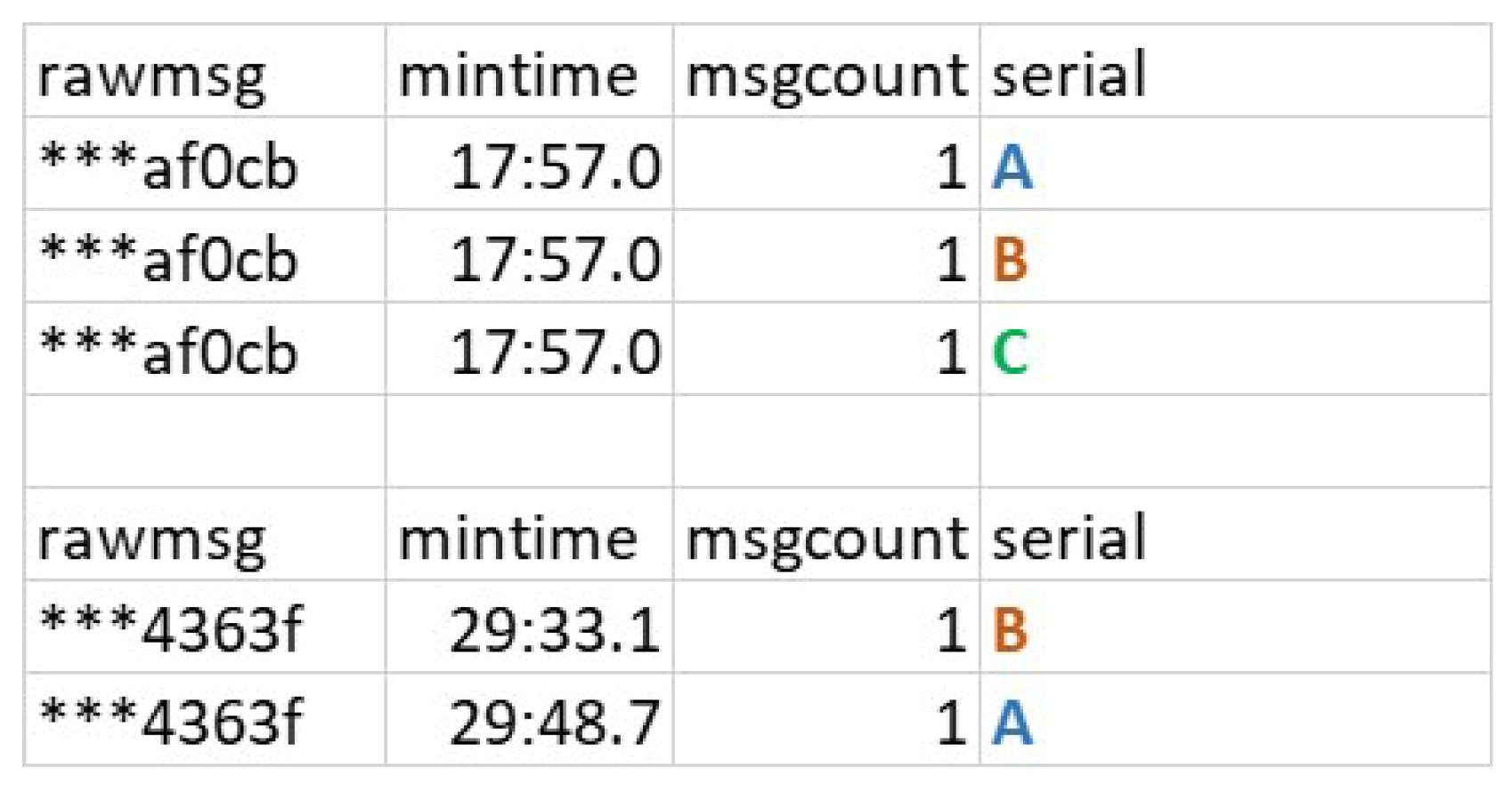
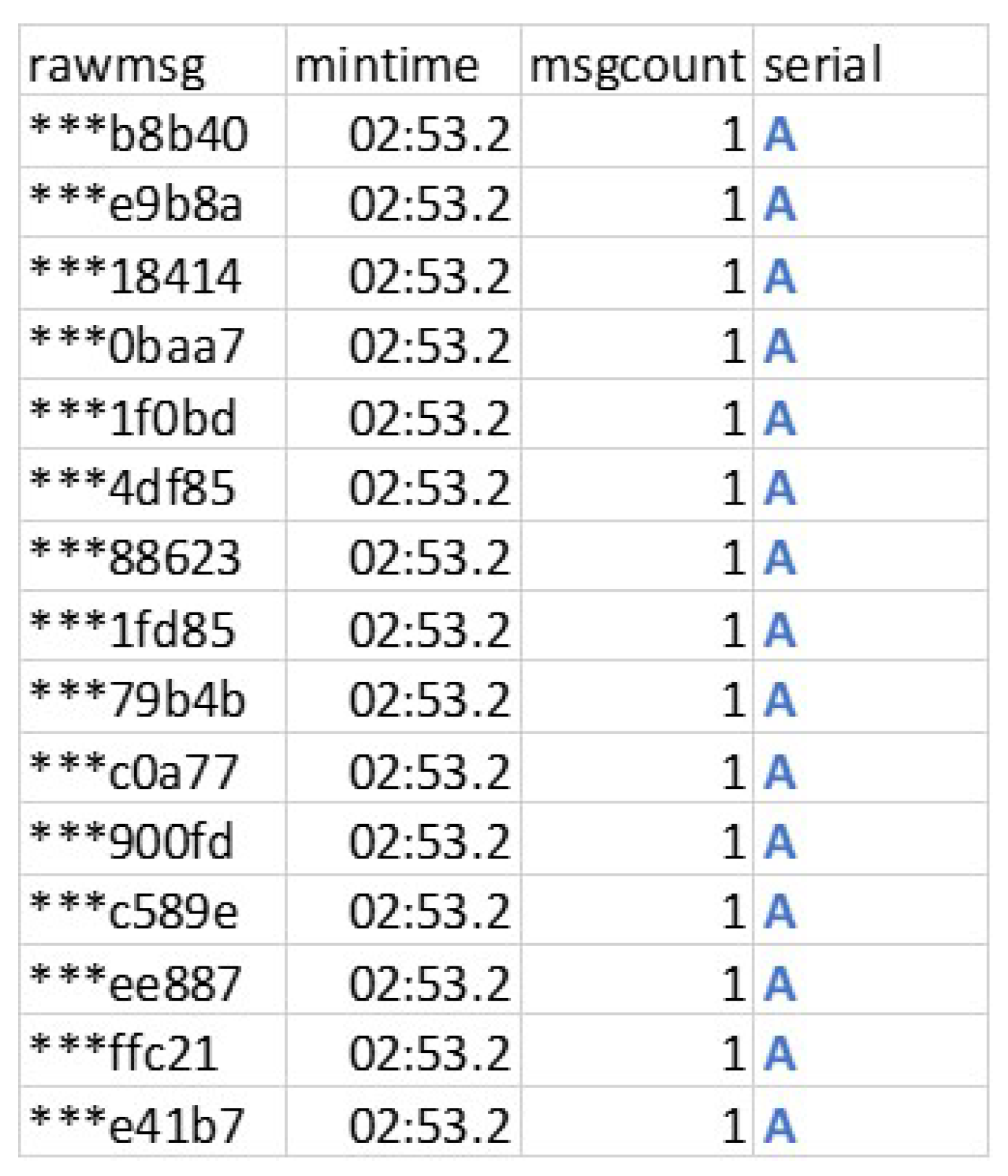
3.1.1. Inconsistent Internal Clock
3.1.2. Incorrect Timestamp
3.2. Interference Events Characterization
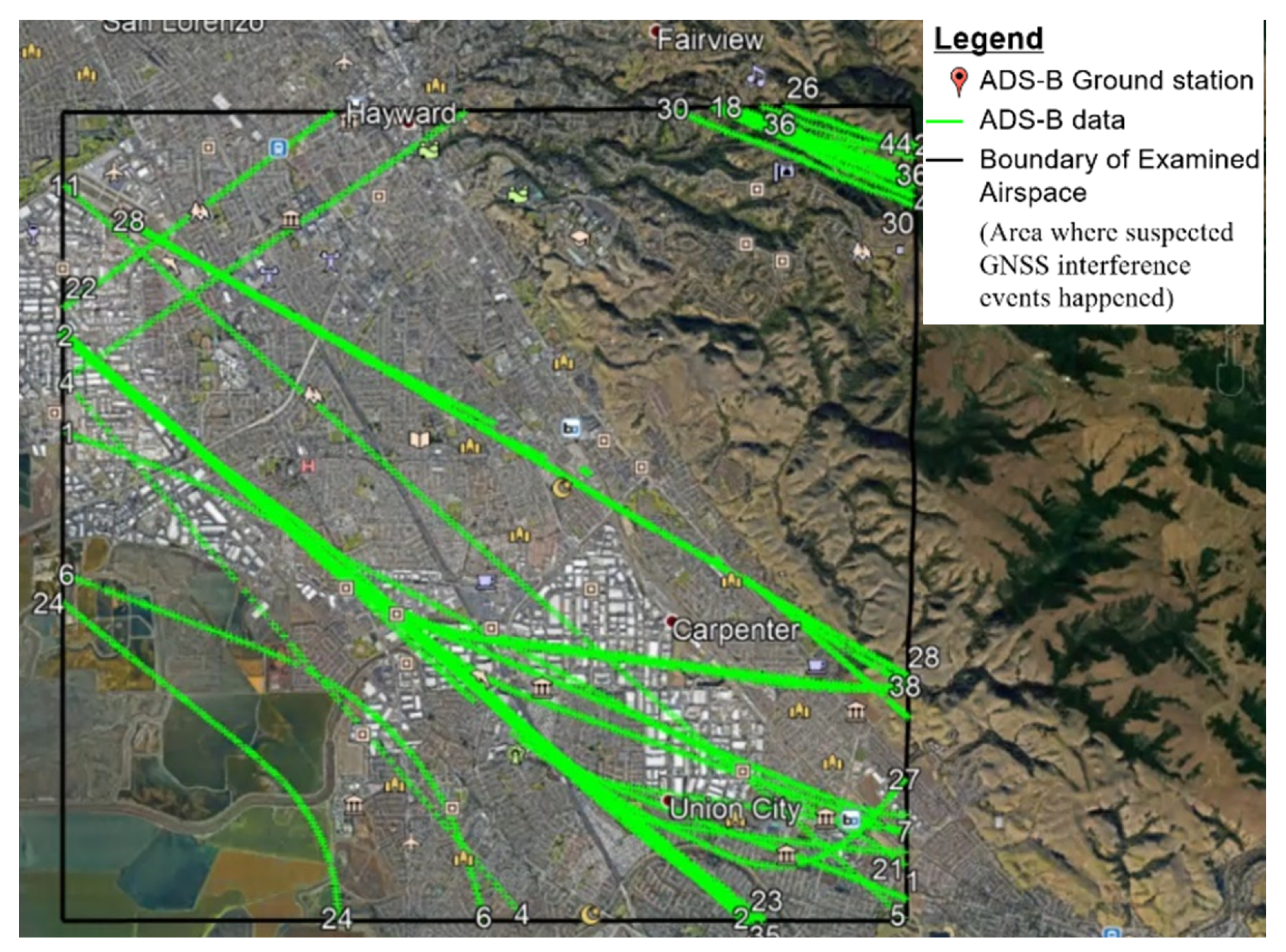
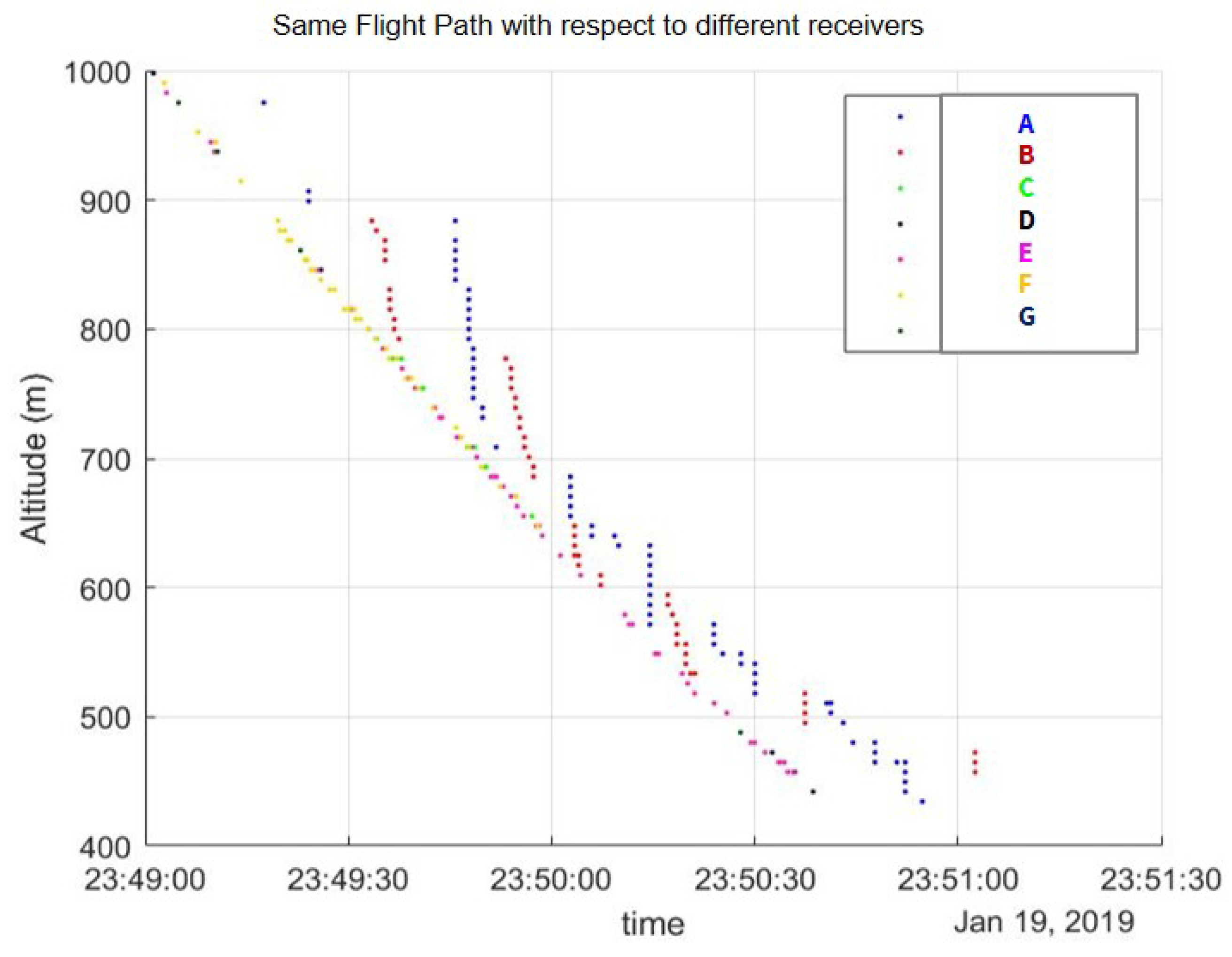
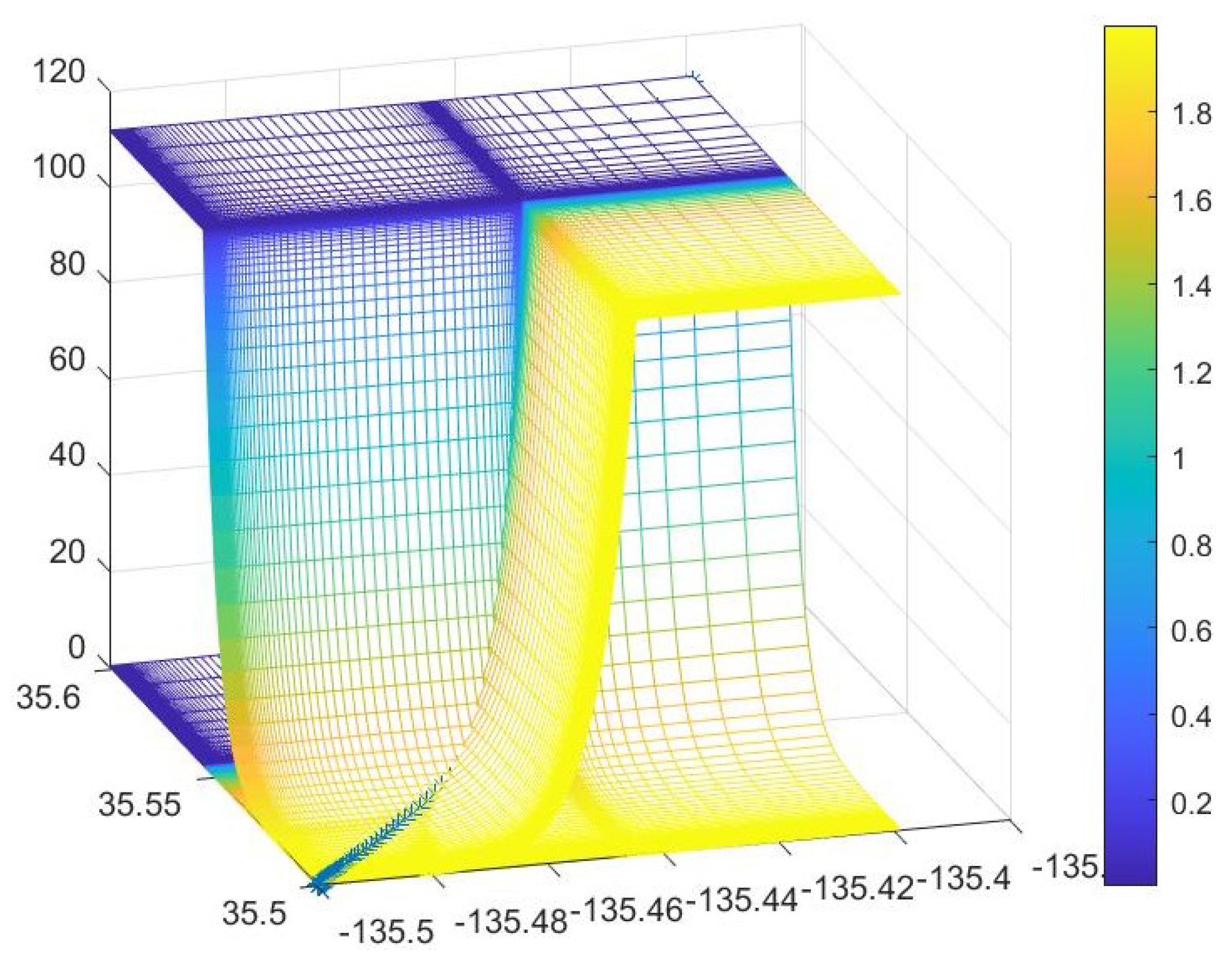
3.3. Interference Sources Localization
3.3.1. Theoretical Test
3.3.2. Real Data Case
4. Discussion and Conclusions
Author Contributions
Funding
Acknowledgments
Abbreviations
| GNSS | Global Navigation Satellite System |
| ADS-B | Automatic Dependent Surveillance-Broadcast |
| RFI | Radio-frequency interference |
| NACp | Navigation Accuracy Category—Position |
| MOPS | Minimum Operational Performance Standards |
| NTP | Network Time Protocol |
References
- Schäfer, M.; Strohmeier, M.; Lenders, V.; Martinovic, I.; Wilhelm, M. Bringing up OpenSky: A large-scale ADS-B sensor network for research. In Proceedings of the 13th International Symposium on Information Processing in Sensor Networks, Berlin, Germany, 15–17 April 2014. [Google Scholar]
- Jonáš, P.; Vitan, V. Detection and Localization of GNSS Radio Interference using ADS-B Data. In Proceedings of the 2019 International Conference on Military Technologies (ICMT), Brno, Czech Republic, 30–31 May 2019; pp. 1–5. [Google Scholar] [CrossRef]
- Darabseh, A.; Bitsikas, E.; Tedongmo, B. Detecting GNSS Jamming Incidents in OpenSky Data. EPiC Ser. Comput. 2019, 67, 97–108. [Google Scholar]
- DO-260B RTCA (Firm). Minimum Operational Performance Standards (MOPS) for 1090 MHz Extended Squitter Automatic Dependent Surveillance-Broadcast (ADS-B) and Traffic Information Services-Broadcast (TIS-B); RTCA, Incorporated: Washington, DC, USA, 2011. [Google Scholar]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Date | Potentially Jammed Days | Flights On Approach (on Jammed Days) | Potentially Jammed Flights |
|---|---|---|---|
| 2019 (January–March) | 8 | 124 | 12 |
| 2020 (January–April) | 14 | 141 | 13 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, Z.; Lo, S.; Walter, T. GNSS Interference Characterization and Localization Using OpenSky ADS-B Data. Proceedings 2020, 59, 10. https://doi.org/10.3390/proceedings2020059010
Liu Z, Lo S, Walter T. GNSS Interference Characterization and Localization Using OpenSky ADS-B Data. Proceedings. 2020; 59(1):10. https://doi.org/10.3390/proceedings2020059010
Chicago/Turabian StyleLiu, Zixi, Sherman Lo, and Todd Walter. 2020. "GNSS Interference Characterization and Localization Using OpenSky ADS-B Data" Proceedings 59, no. 1: 10. https://doi.org/10.3390/proceedings2020059010
APA StyleLiu, Z., Lo, S., & Walter, T. (2020). GNSS Interference Characterization and Localization Using OpenSky ADS-B Data. Proceedings, 59(1), 10. https://doi.org/10.3390/proceedings2020059010