1. Introduction
The worldwide trend in the construction of building, earthmoving, forest, and similar machines is not only to reduce their fuel consumption, but also to reduce the load of gaseous and acoustic emissions that burden their surroundings. There are numerous solutions by researchers and designers. One of the major pathways is the electrification of the drive using an electric battery (electric accumulator). Mathematical modeling and computer simulation play an important role in this research, enabling the search for optimal solutions in virtual space. The aim of our research was to create an electric battery drive of a small excavator up to two tons by replacing the diesel engine with an electric motor together with the creation of a new system of internal control of the excavator subsystems. The new design was made in our own way after completing a patent search to avoid a patent conflict.
Within the framework of a grant project, Bosch Rexroth [
1], in cooperation with Brno University of Technology, developed the drive and control of a gas emission-free excavator after previous cooperation involving the kinetic energy recovery of heavy vehicles with frequent starting and braking.
As the excavators are often used in the building industry, considerable attention has been paid to their construction and improvement in respect to electrification worldwide. The advantage of the described excavator is the drive without gas exhalations.
Recently, new electrified excavators of various innovative designs and properties can be found on the world market. Caterpillar [
2], along with Pon Equipment, produced an all-electric 26 ton excavator with a 300 kWh battery pack in an effort to electrify the construction equipment. They built a prototype in Gjelleråsen, Norway, for the construction company Veidekke.
Komatsu Ltd. [
3] developed an electric battery-driven excavator. When fully charged, this battery enables from two to six hours of operation. The machine allows for real-time monitoring of power consumption and charging conditions on the built-in monitor panel. It also allows for the remote monitoring of that information together with the machine location and operating conditions via the KOMTRAX system.
The Liebherr [
4] electric excavator R 9200 E with a rated output of 850 kW is the biggest excavator on Eurovia mine’s 350 sites—up to 25% less maintenance cost compared to a diesel excavator.
Takeuchi [
5] developed an e240 4 t class battery-powered excavator in 2017. The e240 is a battery version of the company’s TB240 diesel model. The machine operates for nine hours at 65% of full load. It charges from a standard 220 V power outlet and take around 10 hours to go to full charge from zero.
Wacker Neuson [
6] debuted its first fully electric, battery-powered EZ17e compact excavator in 2018. All hydraulic functions are as powerful as those of the conventional model. The battery is integrated into the existing engine compartment. The EZ17e weighs almost exactly the same as the diesel version and can be transported on a trailer.
Bobcat [
7] rolled out the E10e, its first electric mini excavator. The machine—fully electric, one-ton mini excavator—was built alongside its diesel-powered siblings, the E08 and E10z mini excavators. Kobelco [
8] introduced its excavator - the addition to the Generation 10 series.
A lot of different solutions are proposed in the literature to improve machinery fuel efficiency, and many of these are based on hybrid solutions. The aim of Casoli [
9] was to present a hybridization methodology that allows for the comparison of different system layouts, to determine the dimensions of the energy storage devices, and finally to determine the most effective hybrid system layout.
Electrification of excavators was described in Vauhkonen [
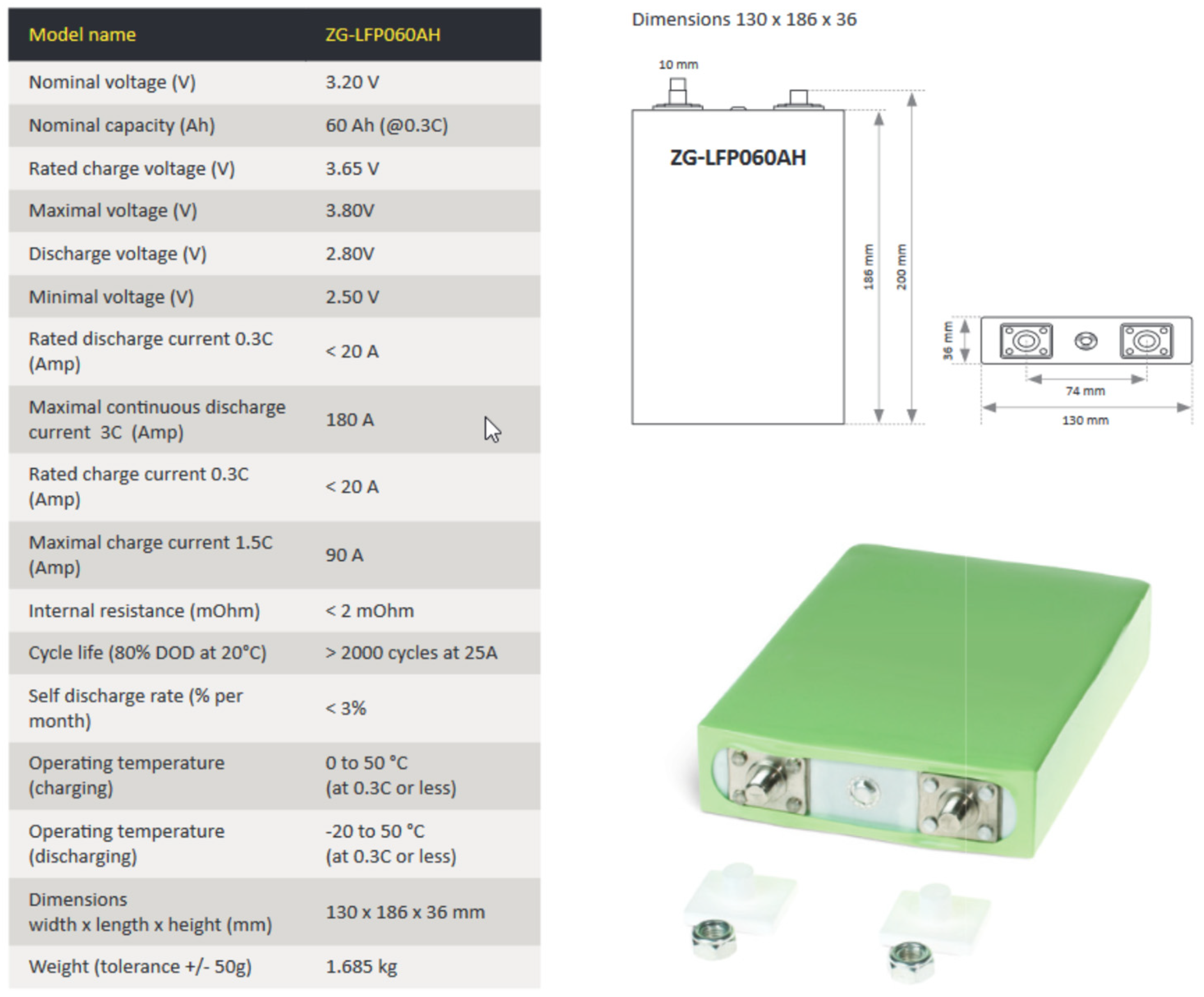
10]. For this study, a JCB Micro excavator was chosen as a building platform. The 14 kW diesel-powered engine with its required equipment was replaced with a 10 kW electric motor. Four lithium titanate batteries, with a total voltage level of 96 V and a capacity of 60 Ah, powered the electric motor.
With the electric drive, while maintaining the same performance, the operating time was substantially reduced compared to the diesel-powered drive.
Xu [
11] studied modeling of mechanical and hydraulic subsystems for the simulation, design, and control development of excavator systems. As a result, various approaches in the hydraulic system modeling were presented. A recent trend in the development of off-highway construction equipment, such as excavators, is to use a system model for model-based system design in a virtual environment.
Modeling of hydraulic systems dynamics by means of differential and algebraic equations can be found in Nevrly [
12] and Nepraz [
13]. Casoli [
14] presented the results of a numerical and experimental analysis conducted on a hydraulic hybrid medium-size excavator. Its standard version was modified using the energy recovery system; its layout was designed to recover the potential energy of the boom, using a hydraulic accumulator as a storage device. The recovered energy was utilized through the pilot pump of the machinery, which operates as a motor, thus reducing the torque required from the internal combustion engine. An experimental fuel saving of about 4% was noted over a testing working cycle.
The objective of the thesis of Alvin [
15] was to develop a fast simulation model to replicate the functioning of the excavator system. The paper by Nevrly et al. [
16] introduced a simulation of drive for electric-hydraulic excavators, basic model schemes of the drive system, simulation models of the electric motor system, and the pump system driven by the electric motor. Examples of simulation results—time courses of model quantities—were received either by means of Matlab/Simulink or a set of differential equations.
An energy recovery system integrating flywheel and flow regeneration for a hydraulic excavator boom system is described in Li [
17]. Implementing the energy recovery system is a solution to improve energy efficiency for hydraulic excavators. A flywheel energy recovery system is proposed based on this concept. A hydraulic pump motor is employed as the energy conversion component and a flywheel is used as the energy storage component. The implementation of flow regeneration has two benefits: downsizing the displacement of the “hydraulic pump motor” and extra improvement of energy efficiency. A potential energy recovery and regeneration system for hybrid hydraulic excavators based on a multi-cylinder structure working device as a new invention is presented in Zhang [
18].
Energy balancing for zero emission excavators was described in Jurik [
19]. The author shows that efficient balancing of energy flows cannot be solved only by optimizing one subsystem, but rather that only the consistency of these subsystems enables the efficient balancing of energy flows for the efficient use of limited power sources—battery packs.
Improving energy efficiency of an electric mini excavator using a special start-and-stop logic system is described in Hassi [
20]. The benefits of this system were measured using a test cycle with the old and new configurations. According to the authors, improvement in the operating time proved to be at least 50% longer than that of the old configuration. The efficiency study of an electric-hydraulic excavator was presented in Salomaa [
21]. A Matlab model was utilized to study the total energy consumption and power distribution of the micro-excavator. The model consists of the hydraulic and mechanical systems related to the actuation of the front hoe, i.e., boom.
In Liu [
22], achievement of fuel savings in a wheel loader by applying hydrodynamic mechanical power split transmissions was described. In this paper, the torque converter was replaced with a hydrodynamic mechanical power split transmission for improving the fuel economy of wheel loader. Based on the probability similarity theory, the typical operating mode for the vehicles was constructed and used to evaluate the energy consumption performance of the selected solutions.
As part of the development of the electric excavator, we prepared a patent study to avoid a patent collision with previously patented solutions. These included, in particular, patents from Kubota, Takeuchi, Hitachi, and Terex (Demag).
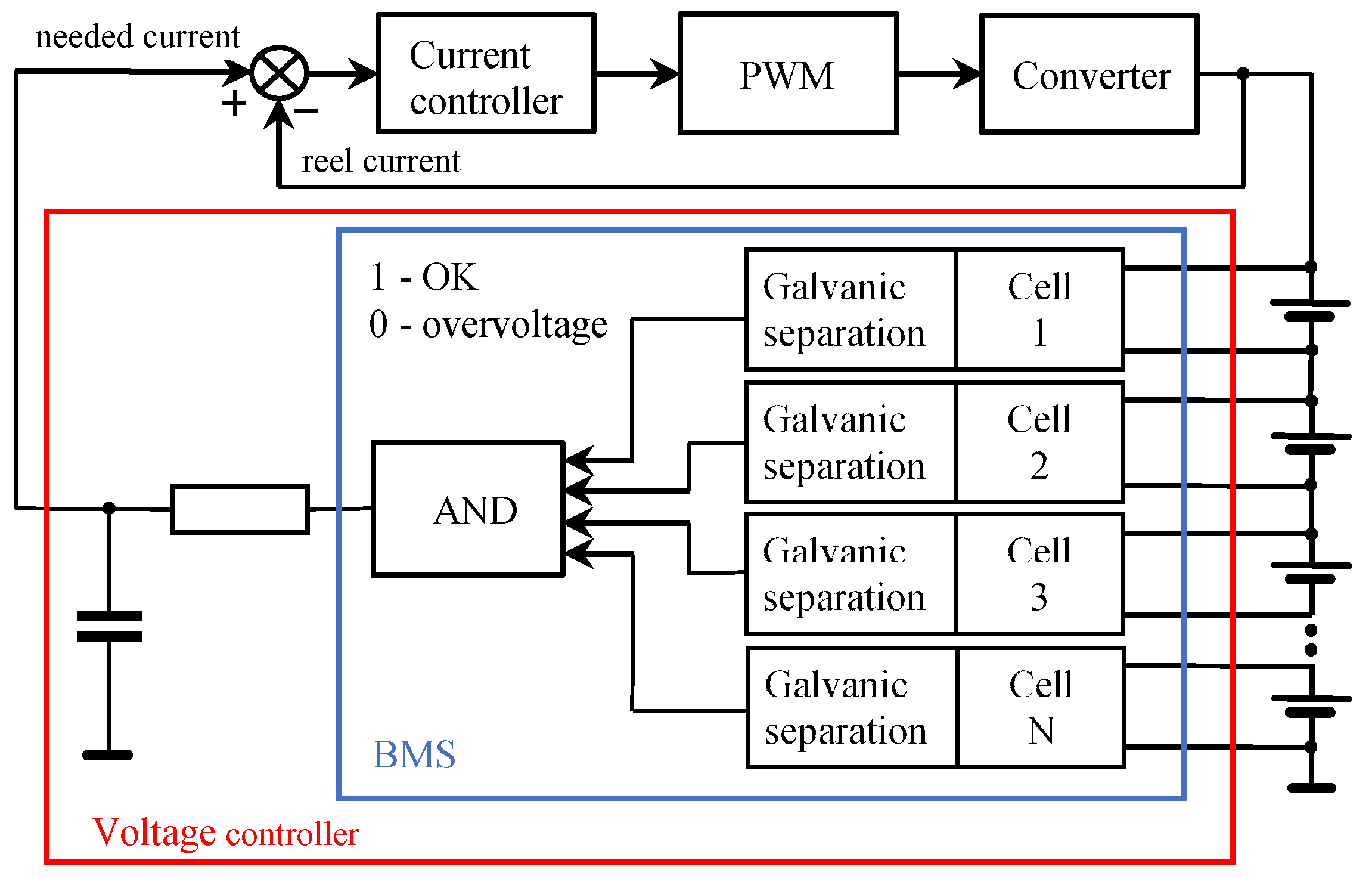
6. Control of Subsystems and Excavator System
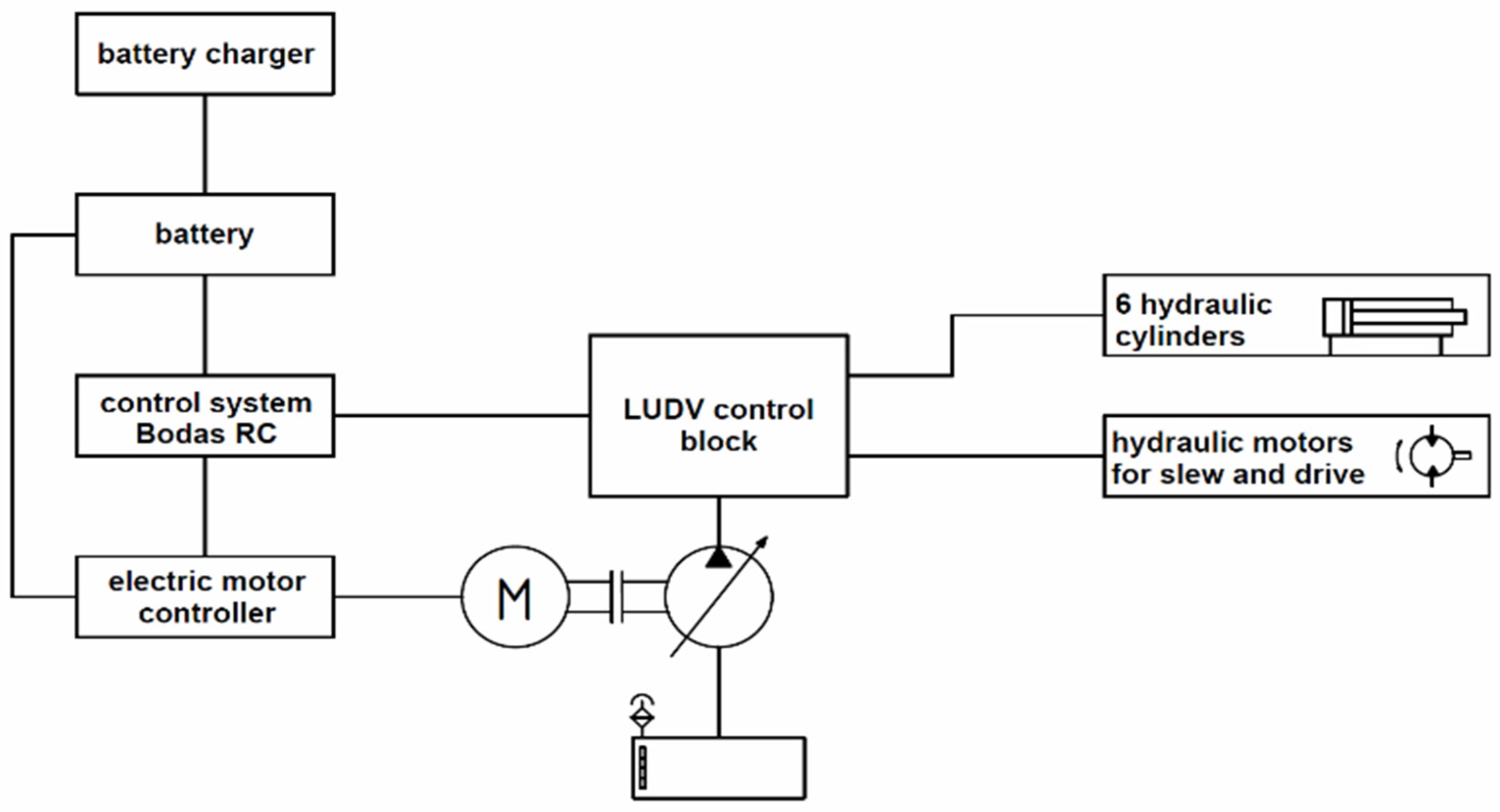
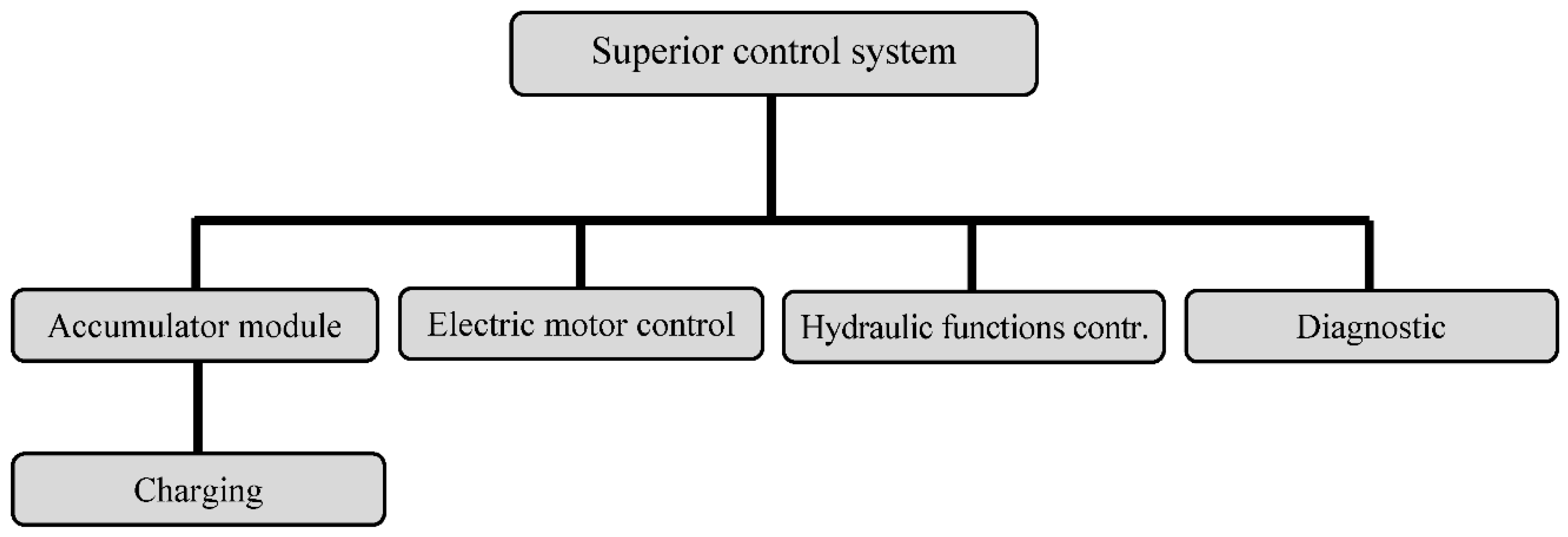
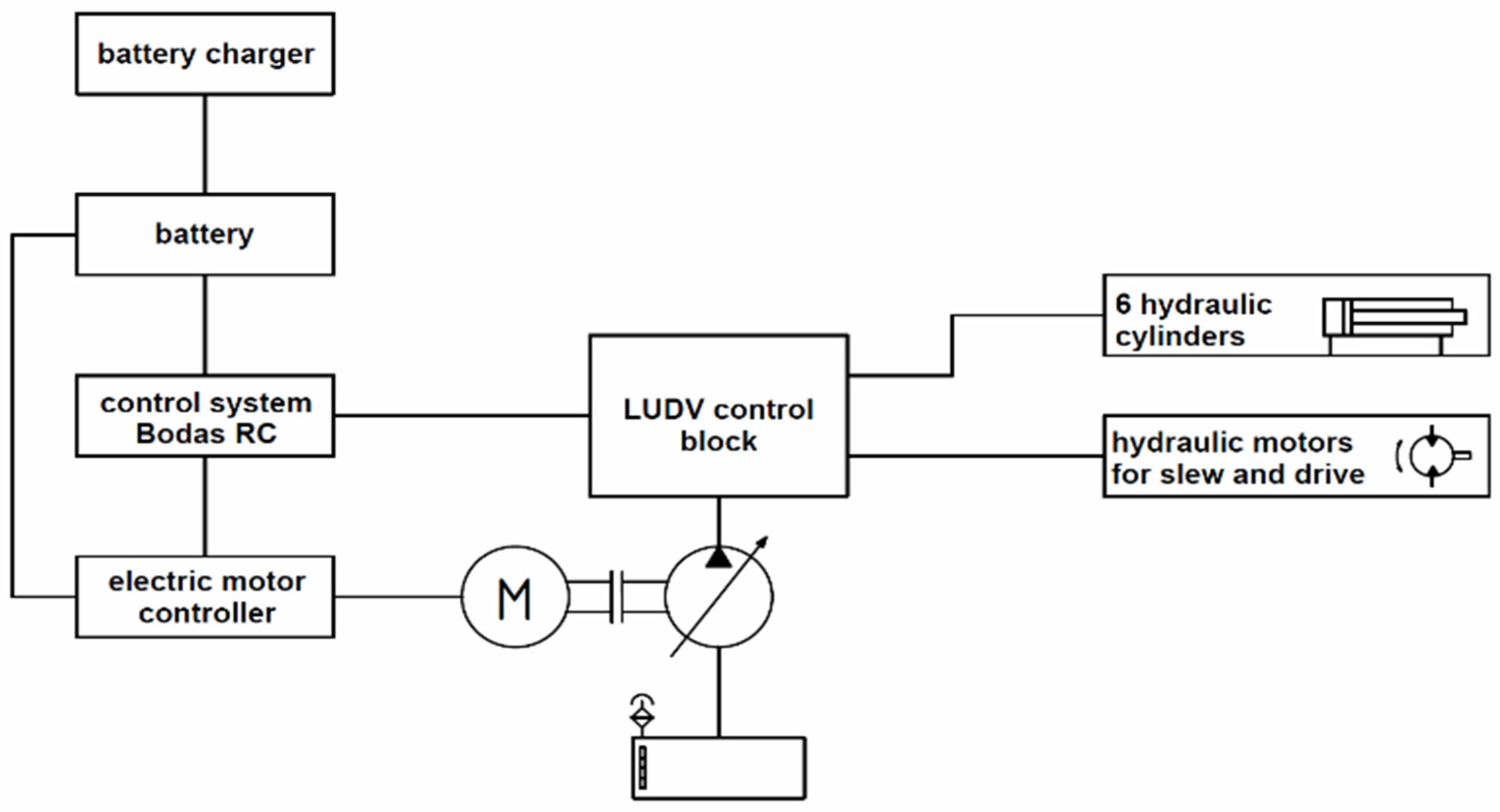
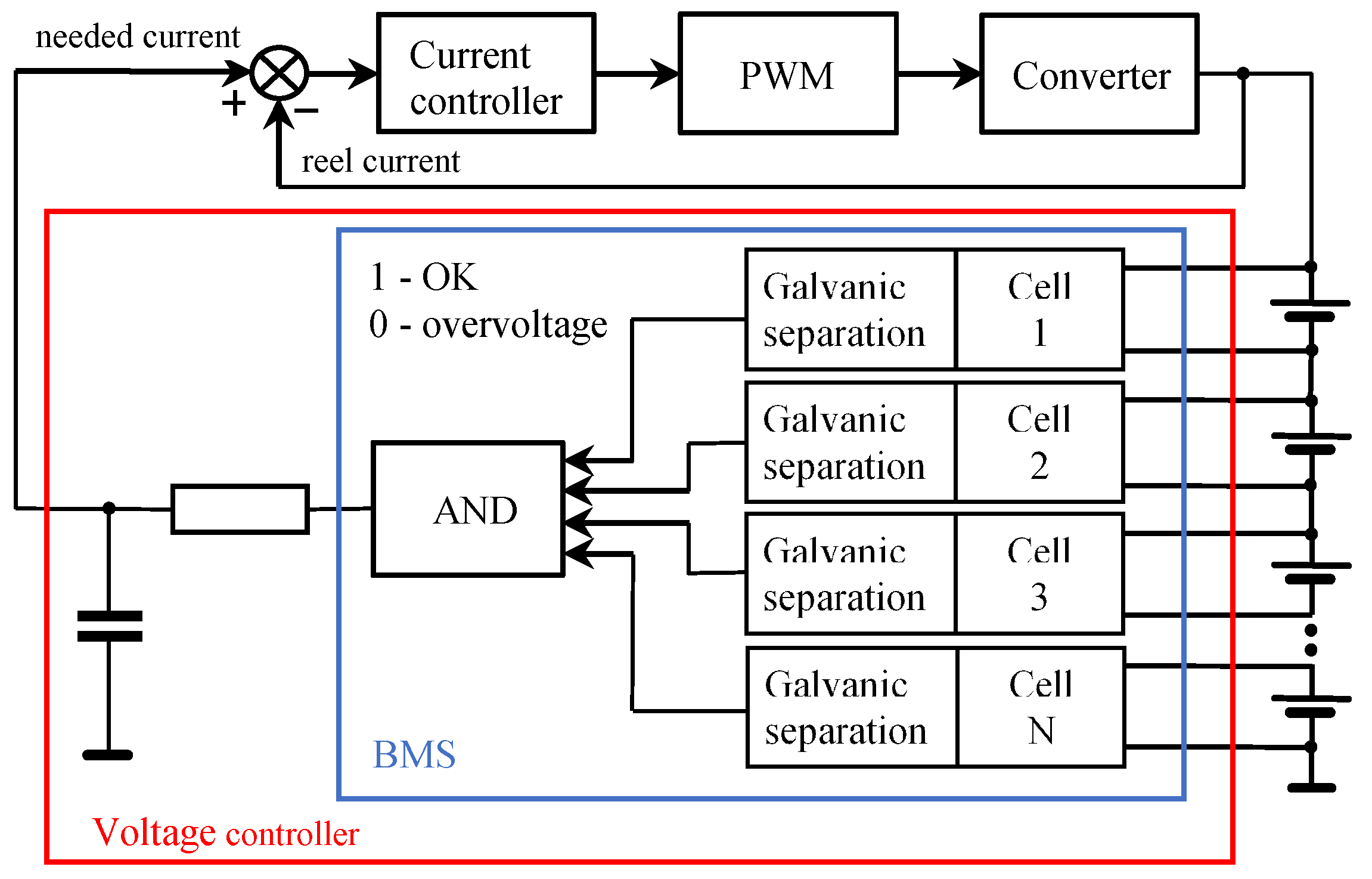
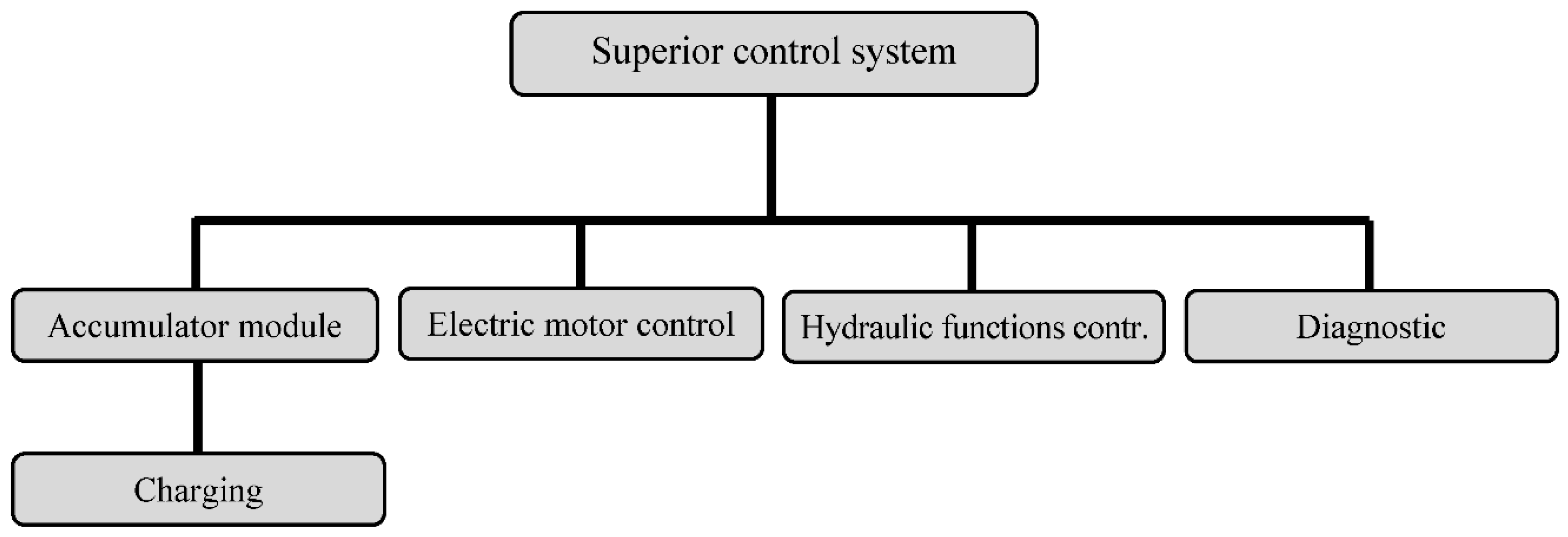
Following the results of the patent search, a specific control algorithm was created; this is the basic distinguishing element of the solution in comparison with other currently known solutions for controlling the excavator drive. The algorithm was created on the modular basis of the Bodas system. The hierarchy of the main parts of the control system is shown in
Figure 13. The superior control system controls the battery module (with the connected charging block), electric motor control, hydraulic functions control, and diagnostics.
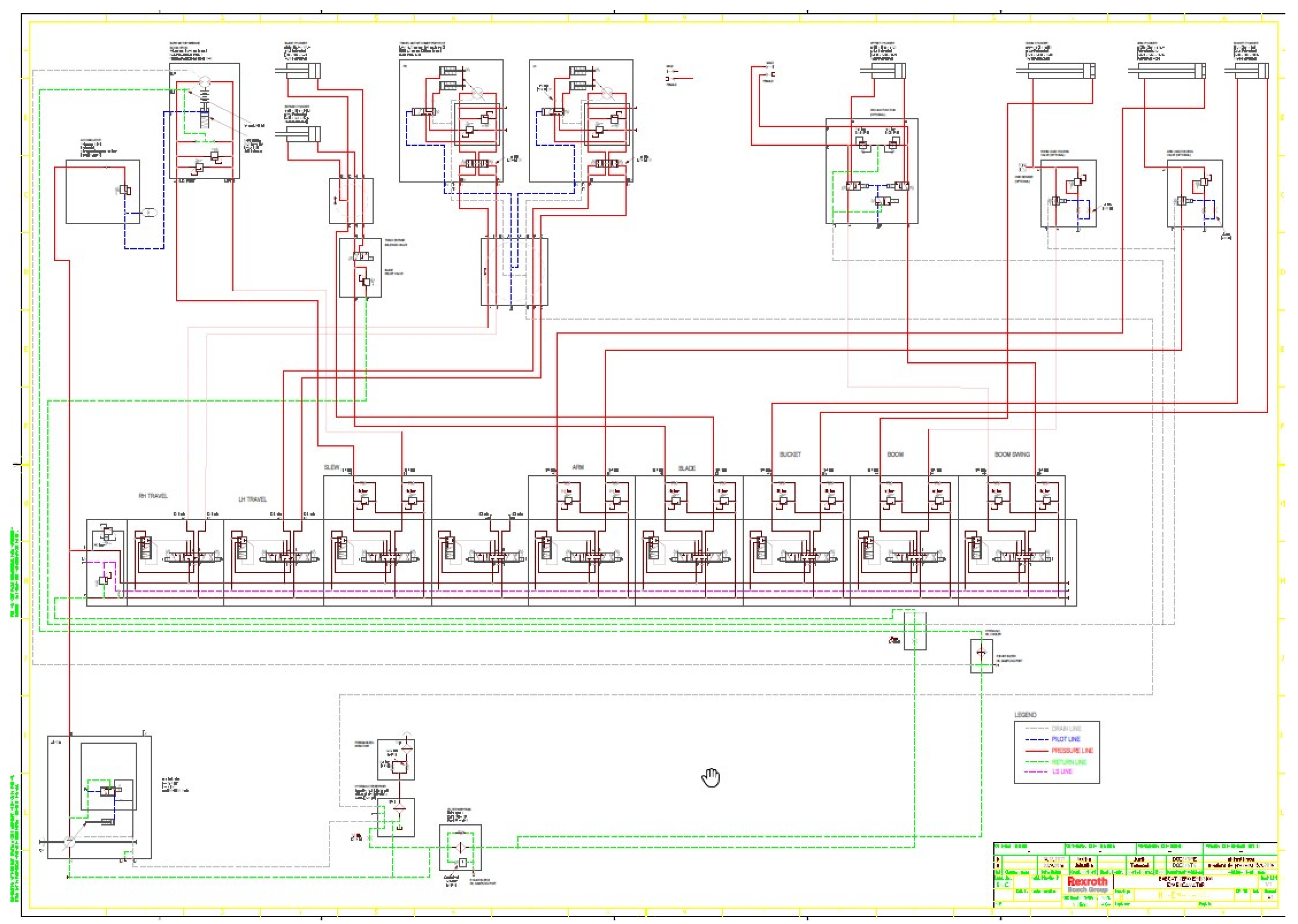
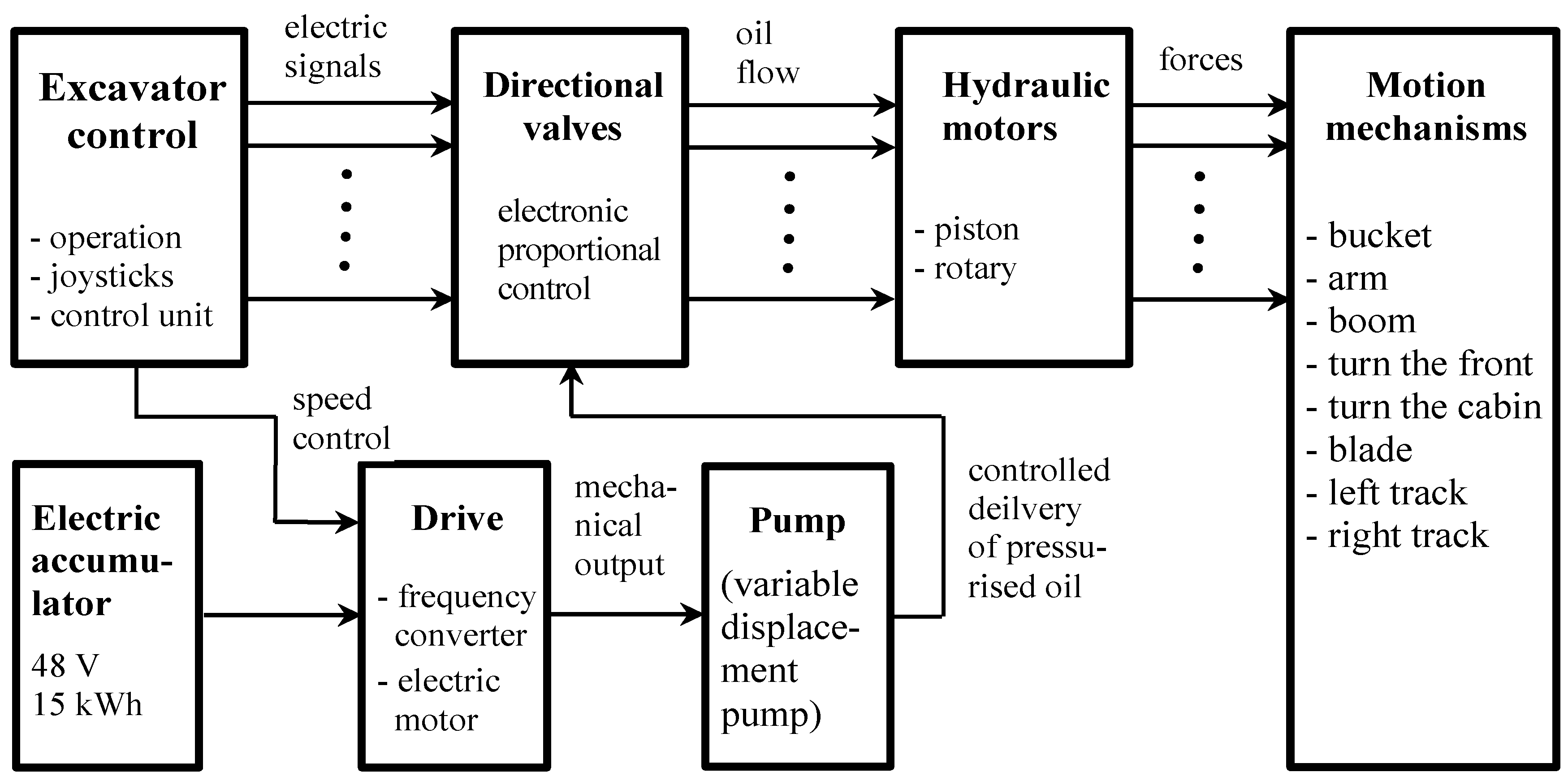
A more detailed scheme of the excavator control is shown in
Figure 14. The initiating electrical signals come from the manual control block of the excavator operation to the hydraulic directional valve block and to the drive block (frequency converter, electric motor). The electric current from the electric accumulator leads to this block and then goes on to the pump block and farther to the hydraulic directional valves. The pressure oil flows from the hydraulic distributors to the hydraulic motors, which move the working mechanisms of the excavator.
From the point of view of control, the decisive block is “operation control,” which implements the interaction between the operator and the excavator. It contains a microcomputer control unit that generates control electric currents for controlling oil flows in directional valves. Control is of an “offline” type, i.e., without feedback from the actual controlled movements.
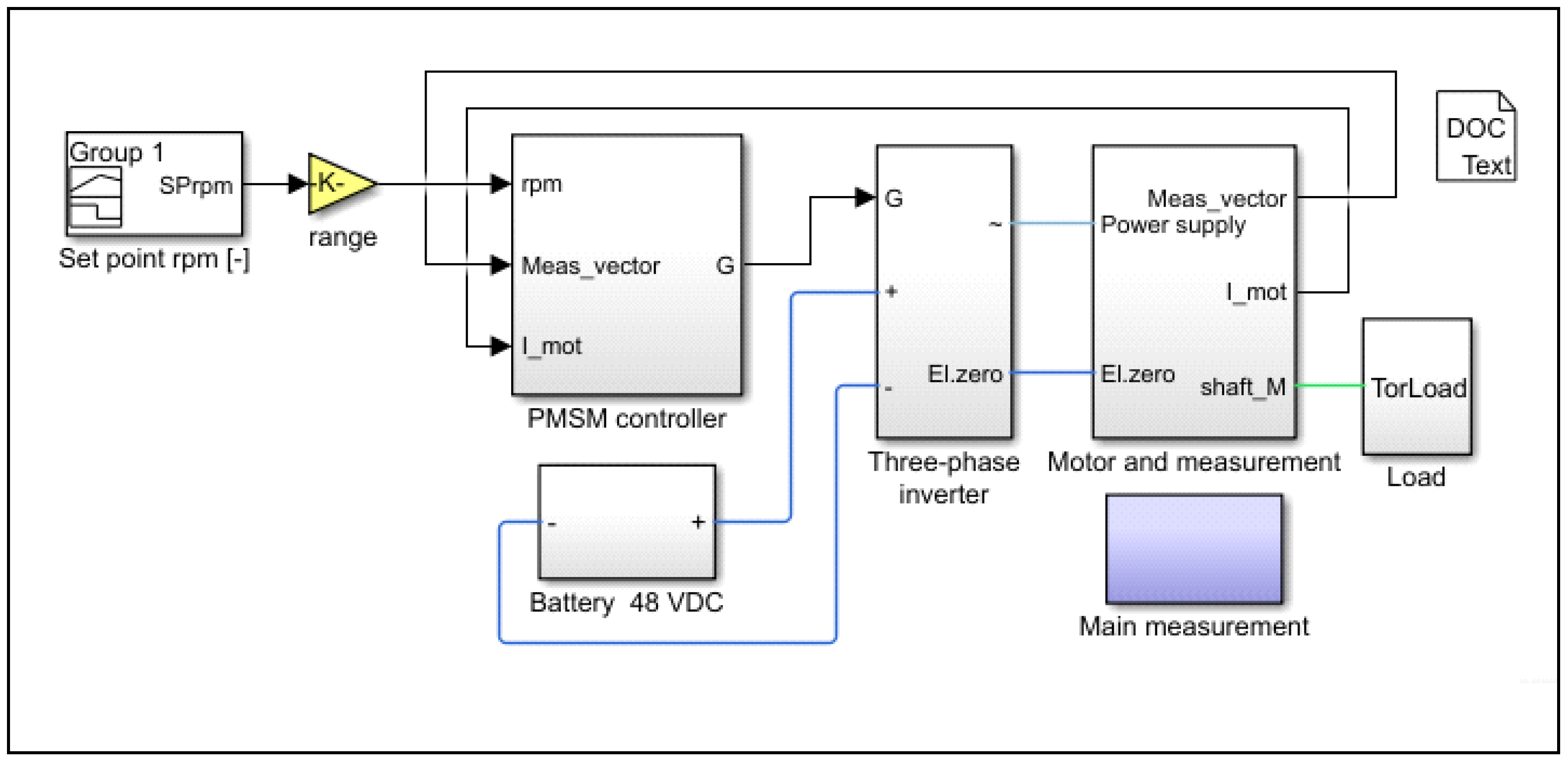
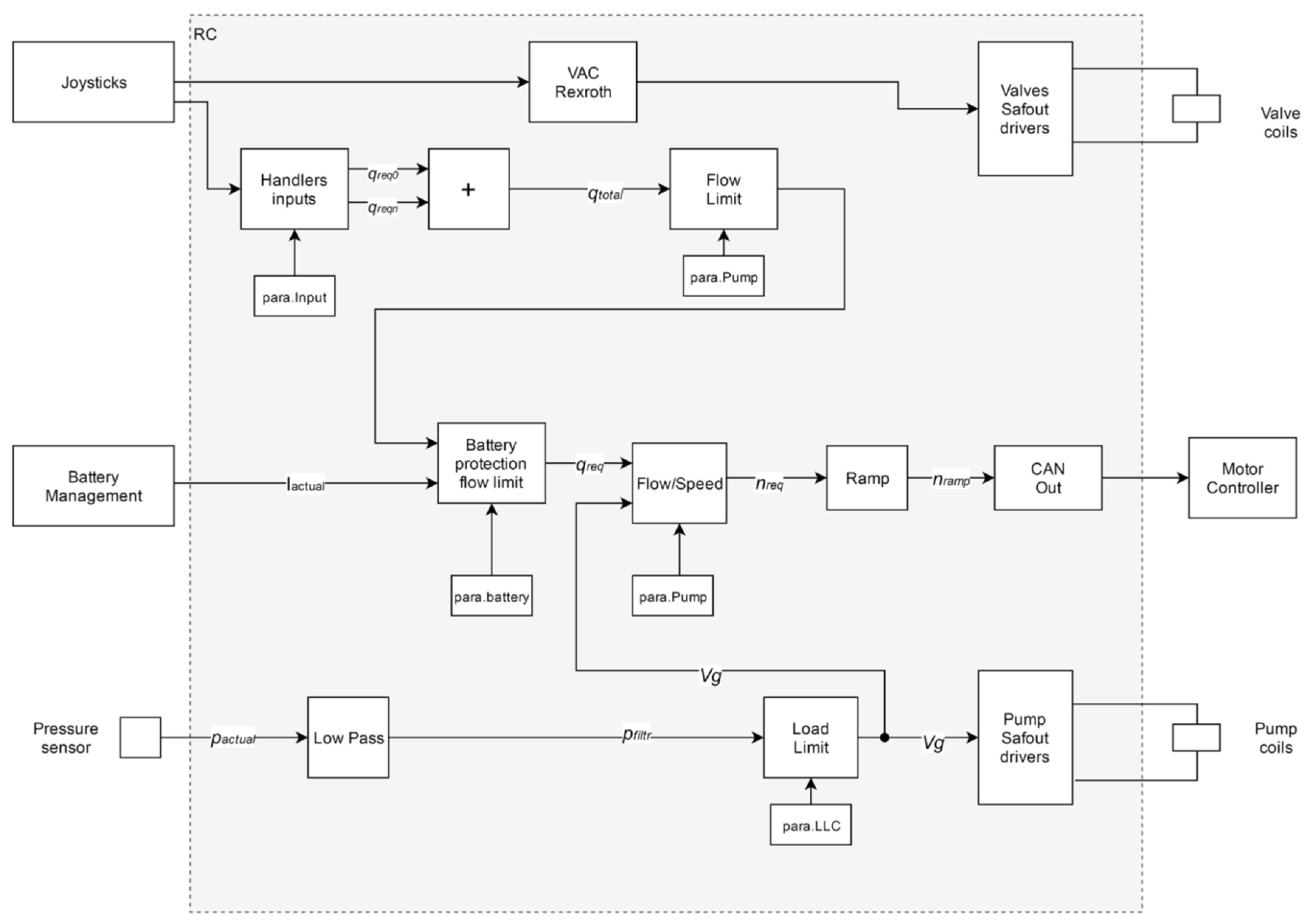
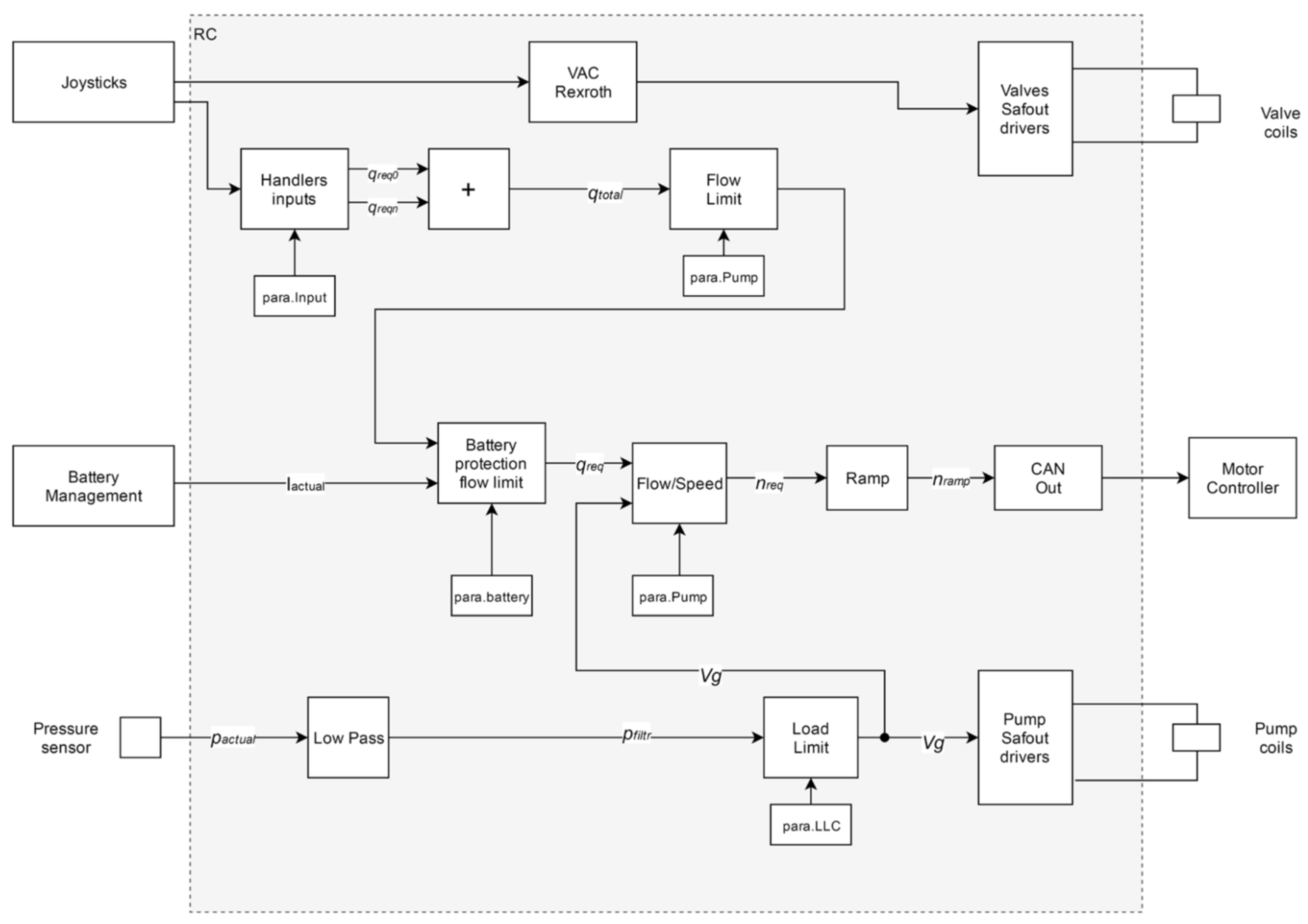
The data flow structure of the basic software modules for controlling the switchboards, the electric motor controller, and the pump can be seen in
Figure 15. The inputs are signals from the manual control, from the battery management, and from the pressure sensor. These signals enter a set of sub-blocks, such as a low limiter, current protection of the accumulator, ramp block, etc. The output signals go to the coils of the electromagnets of the hydraulic routers, the motor controller, and the pump coils.
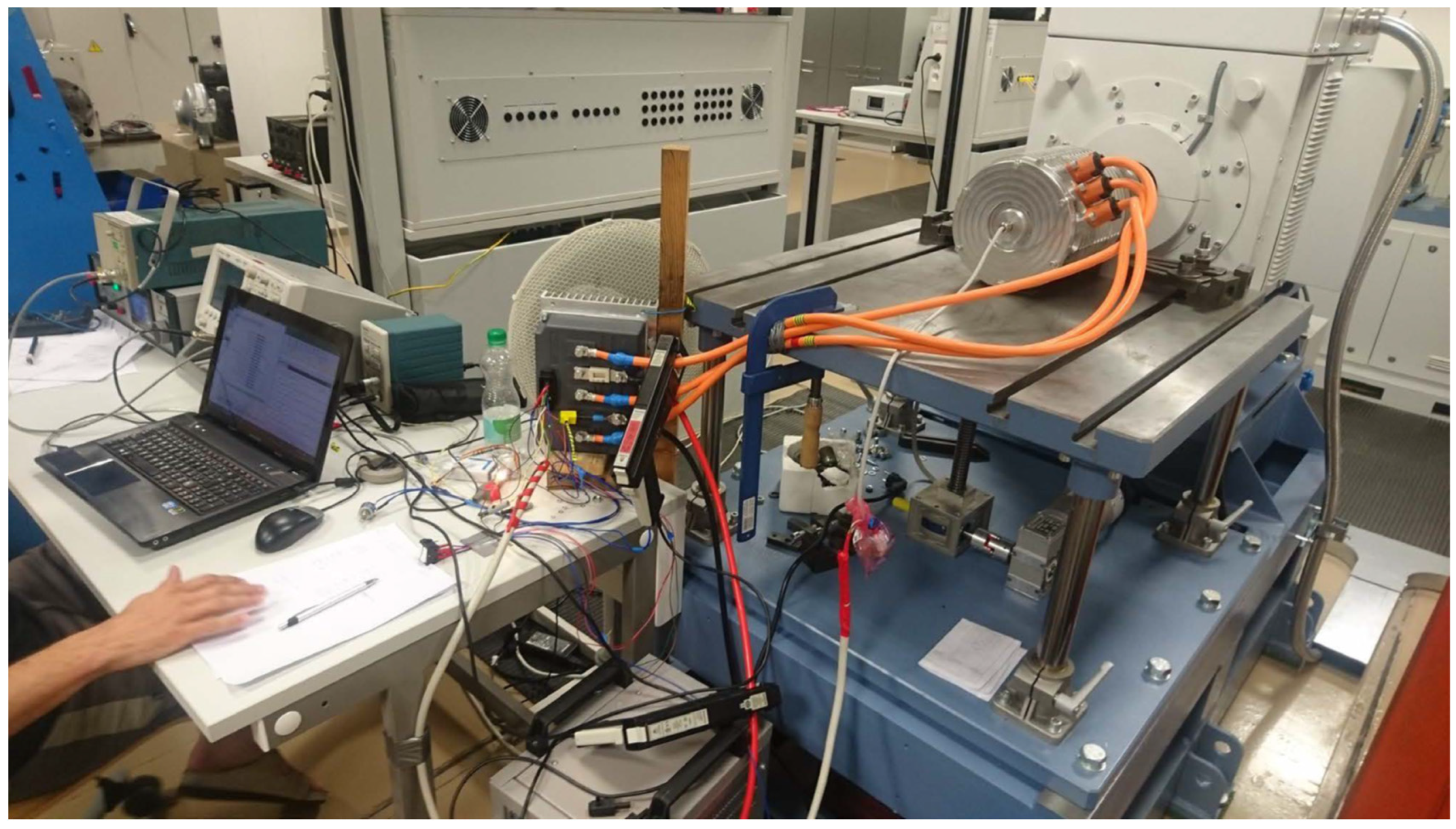
7. Experiments
The research used a methodology of theoretical and experimental verification of drive parameters, including the measurement of electrical, mechanical, hydraulic, and functional safety parameters of the excavator. The functional test methodology consisted of methodologies for excavation, travel, and load transfer.
Figure 16 shows an example of the result of measurement of the speed (actual versus target), torque, battery current, etc., when starting and stopping the electric motor.
The following values of energy consumption within one hour were reached using the electrical parameter tests:
Excavation: consumption from 1.61 to 3.85 kWh
Relocation: consumption from 0.76 to 1.39 kWh
Travel: consumption from 0.64 to 5.46 kWh
A specific feature in the assessment of the actual use appears to be the ability to work and the endurance of the machine operator when working in full concentration and maintaining safety for the specified period. During tests in ideal spatial conditions, operators were changed after one hour of work; this allowed us to achieve relatively high performance at work.
Example of Simulated Event
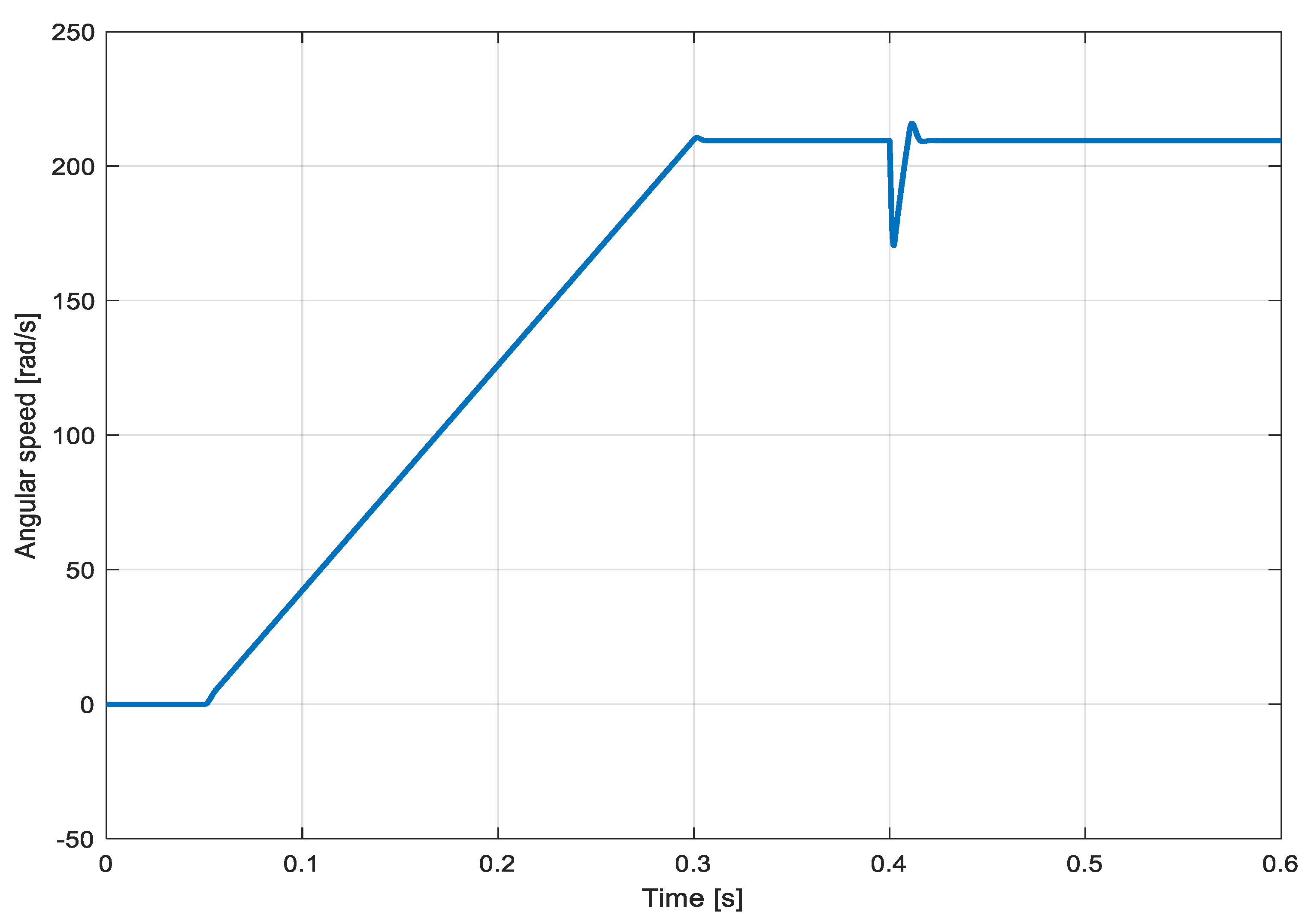
The characteristics of the electric rotary motor for the pump drive were first simulated (
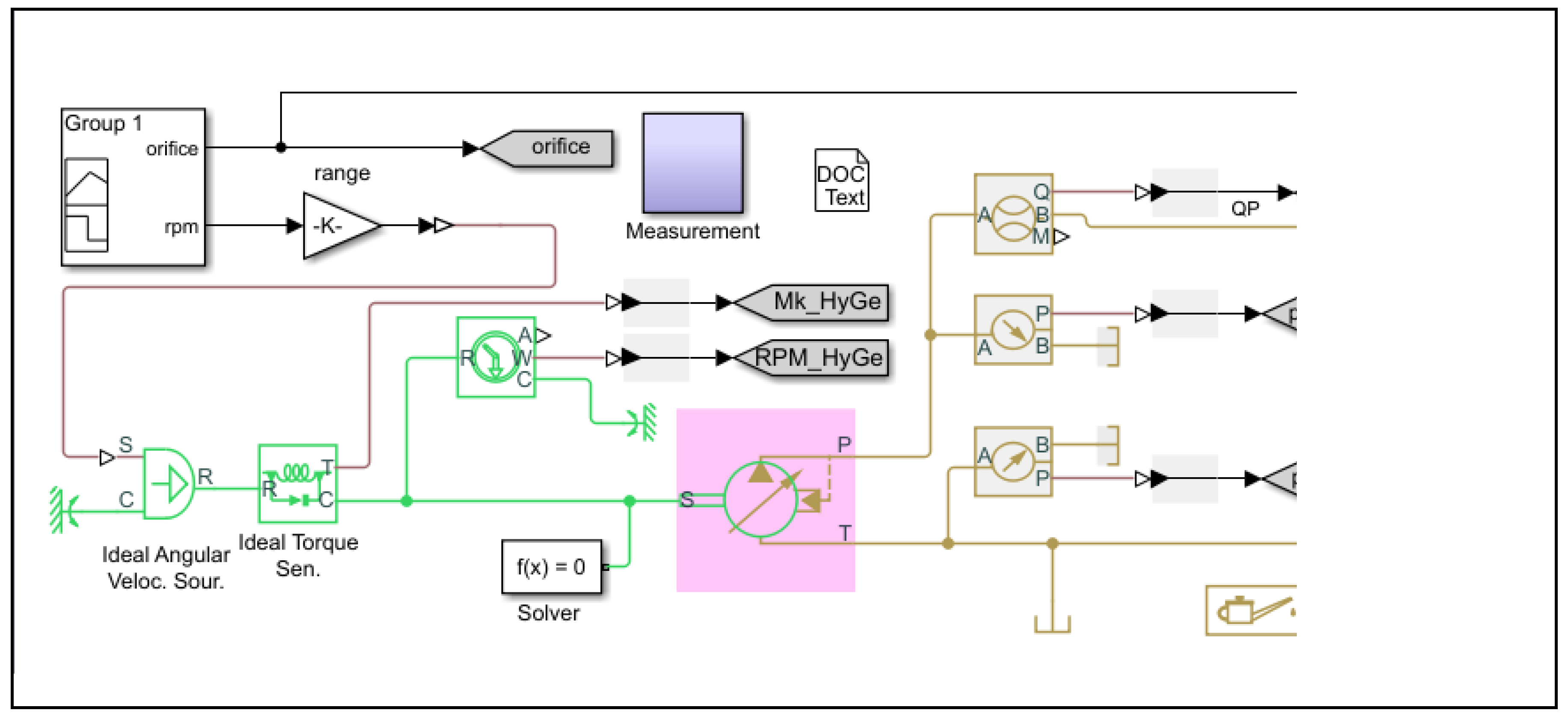
Figure 17) and subsequently measured. Motor acceleration went from 0 to 2000 rpm without load. In 0.4 s, a torque impulse of 0–30 Nm was applied to the motor.
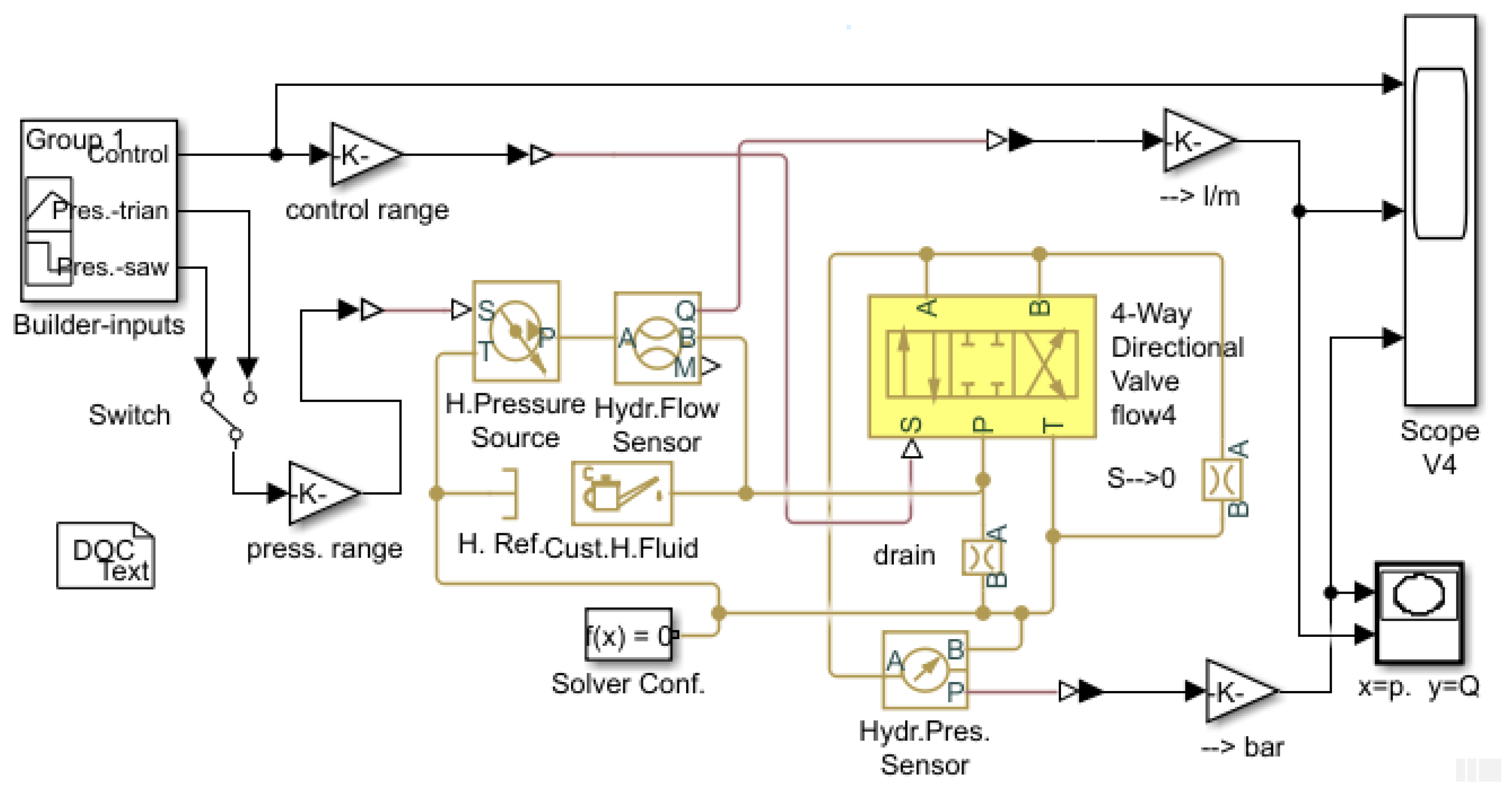
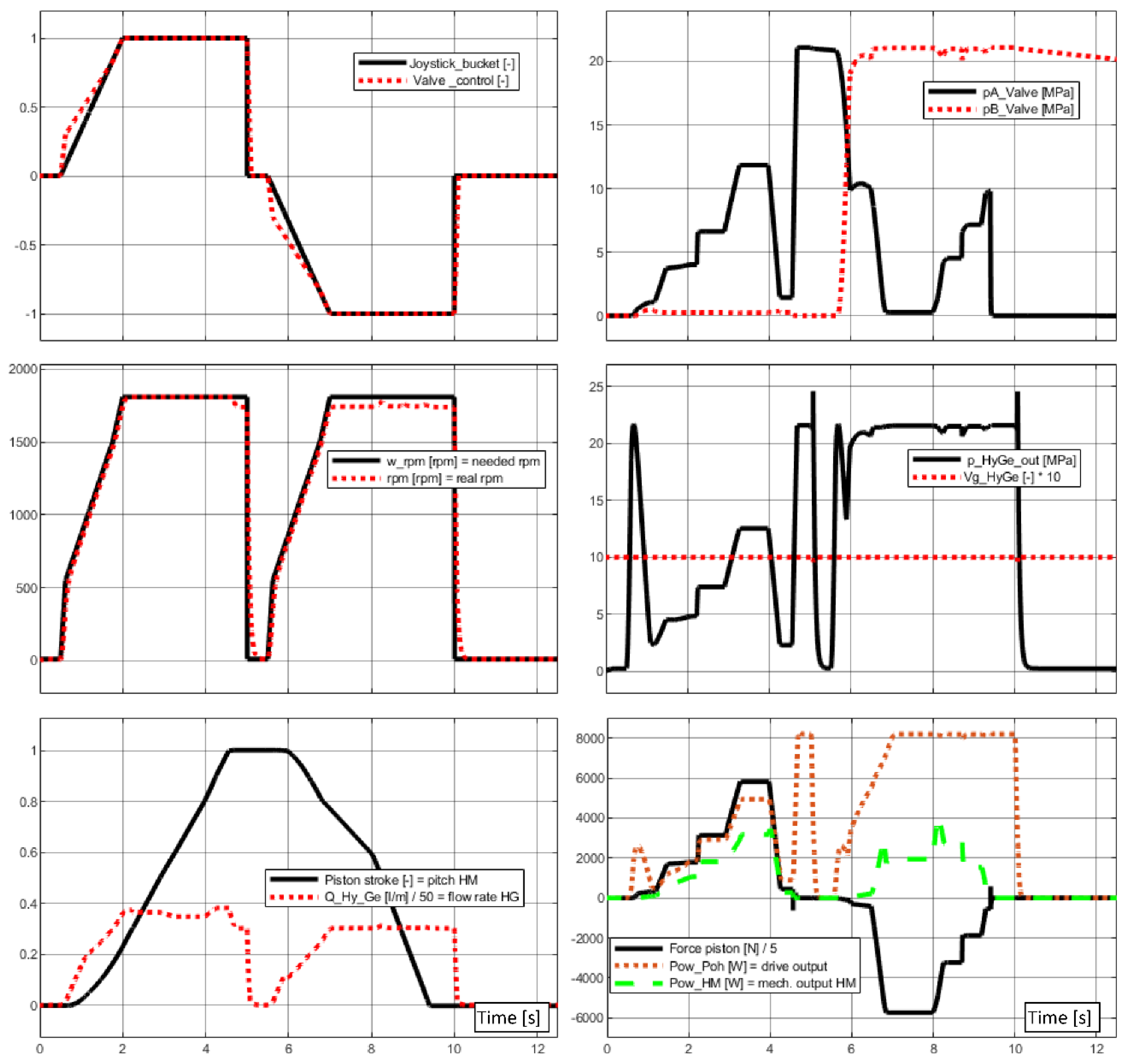
Figure 18 shows the results of the simulation of hydraulic, mechanical, and electrical quantities during several rapid movements of the excavator bucket, while the load changes stepwise almost to the maximum (force piston, max = 27,000 N for both directions of movement). The drive was already slightly overloaded (actual speed was lower than required).
9. Discussion
The new type of drive predetermines the use of the excavator, especially for such places where operation without gas exhalations and with lowered noise otherwise emitted by internal combustion engine is required, i.e., in enclosed spaces and protected areas such as hospitals, rehabilitation facilities, protected landscape areas, etc.
The limiting factor for achieving higher perfection of the models (accuracy, reliability) is the limited availability of parameters of the modeled parts of the device. Some parameters must then be determined by expert judgment. Also, the possibilities of model verification are complicated by the fact that, currently, the measurements on a real excavator can contain only a limited number of measured quantities, some of which (mainly torque) showed a certain unreliability. The verification had to be performed by a detailed analysis of only some of the mutually corresponding parts of the measurement and simulation records.
The standard drive system of excavators powered by hydraulic motors seems to be somewhat inefficient due to the repeated conversion of energy: electric (in the case of a battery excavator)–mechanical–hydraulic–mechanical. This causes some energy losses. A direct electric drive with one conversion, electric–mechanical, could theoretically lead to an increase in drive efficiency. A change of this kind was not among the objectives of the described project, but it seems to be a potential topic for the next phase of electrification of excavators and similar machines.
A battery electric drive brings new possibilities to the field of mobile working machines for the efficient use of installed energy. The simulations and functional tests show the advantages and disadvantages of this solution.
Due to the designation of the machine for operations requiring zero gas exhalations, it is now difficult to compare its economic parameters, such as machine price, all operating costs, and return on investment, to the parameters of a standard machine with an internal combustion engine while achieving the same or longer machine life. The results of the development as mathematical models were usable not only during the solution of the project, but also after the end of the project for similar development work. The knowledge from modeling is transferable to similar applications of control of hydrostatic drives, hydraulic motors in building, earthmoving machines, and the like.

 ,
, {kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}