Effect of Surrogate Surface Compliance on the Measured Stiffness of Snowboarding Wrist Protectors †

 ,
, 
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Materials and Methods
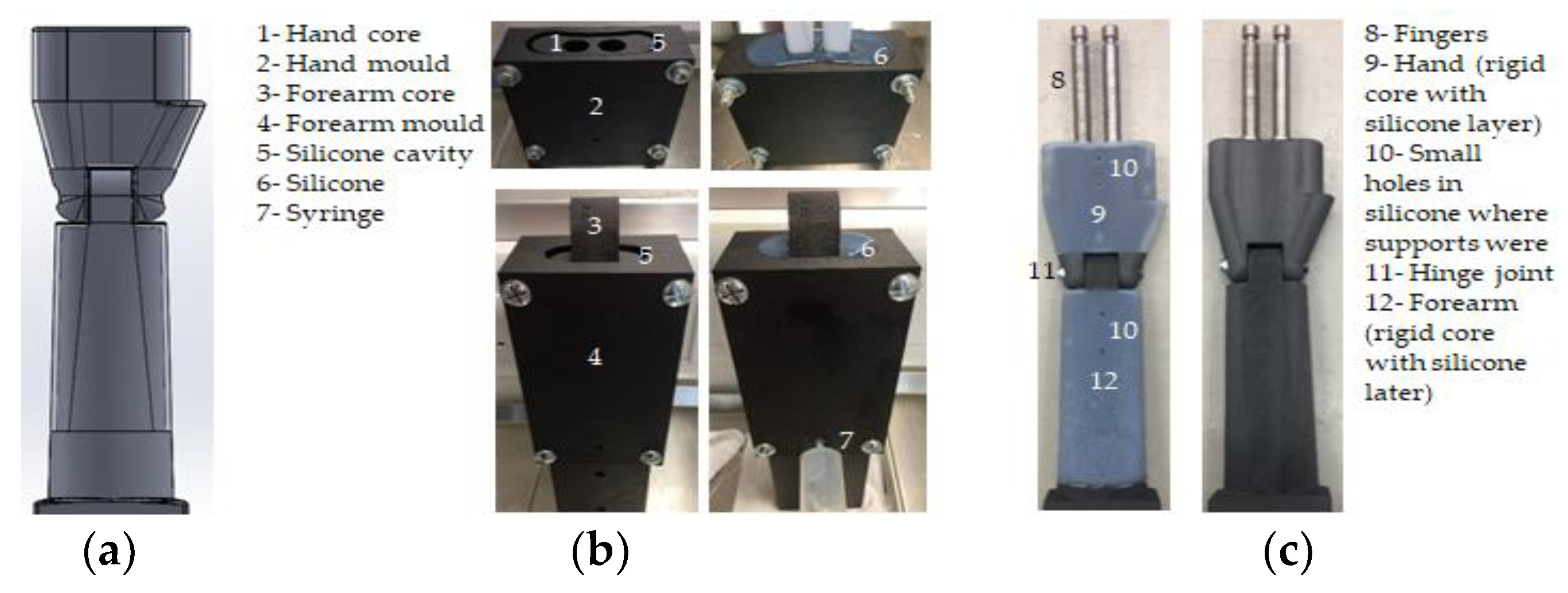
2.1. Surrogate Fabrication
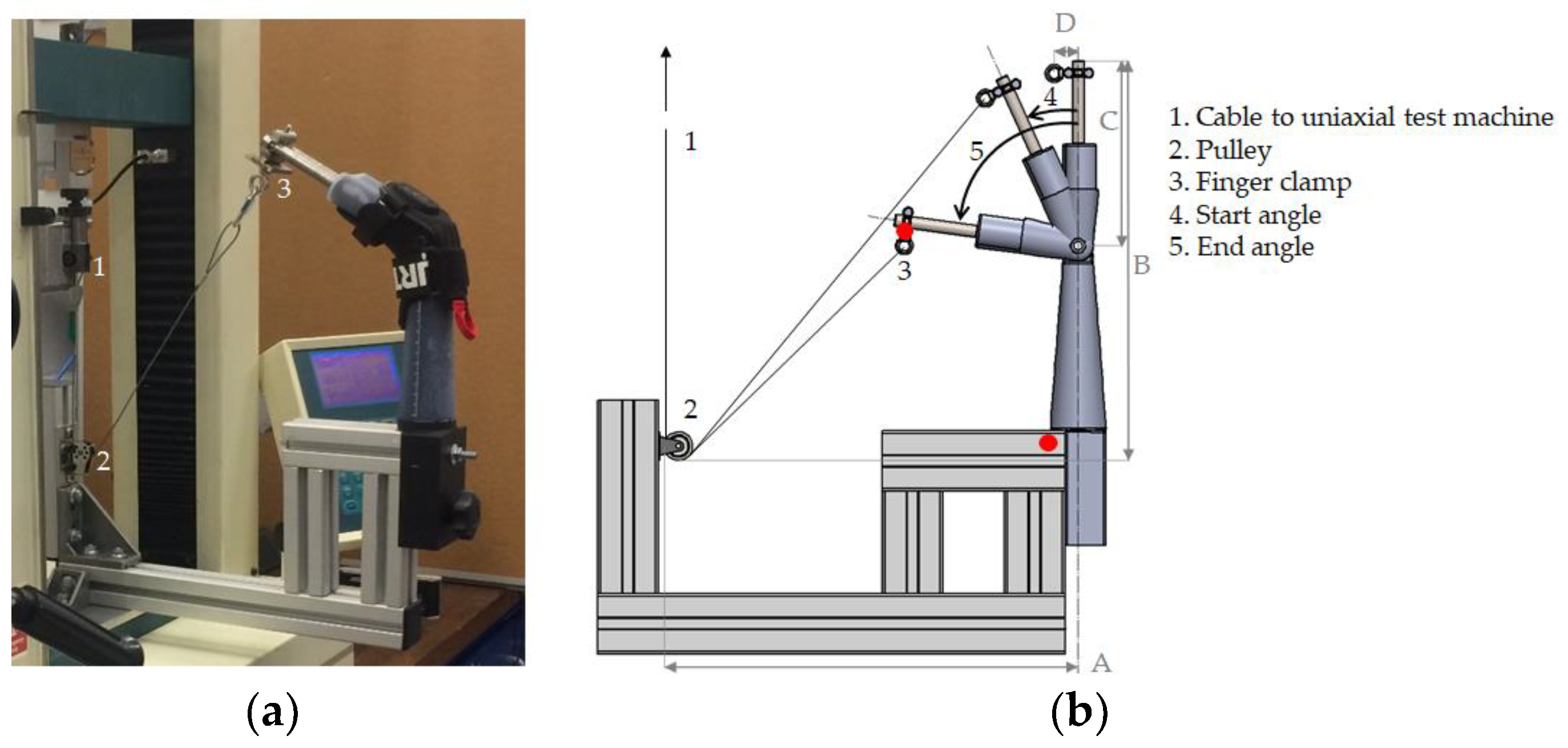
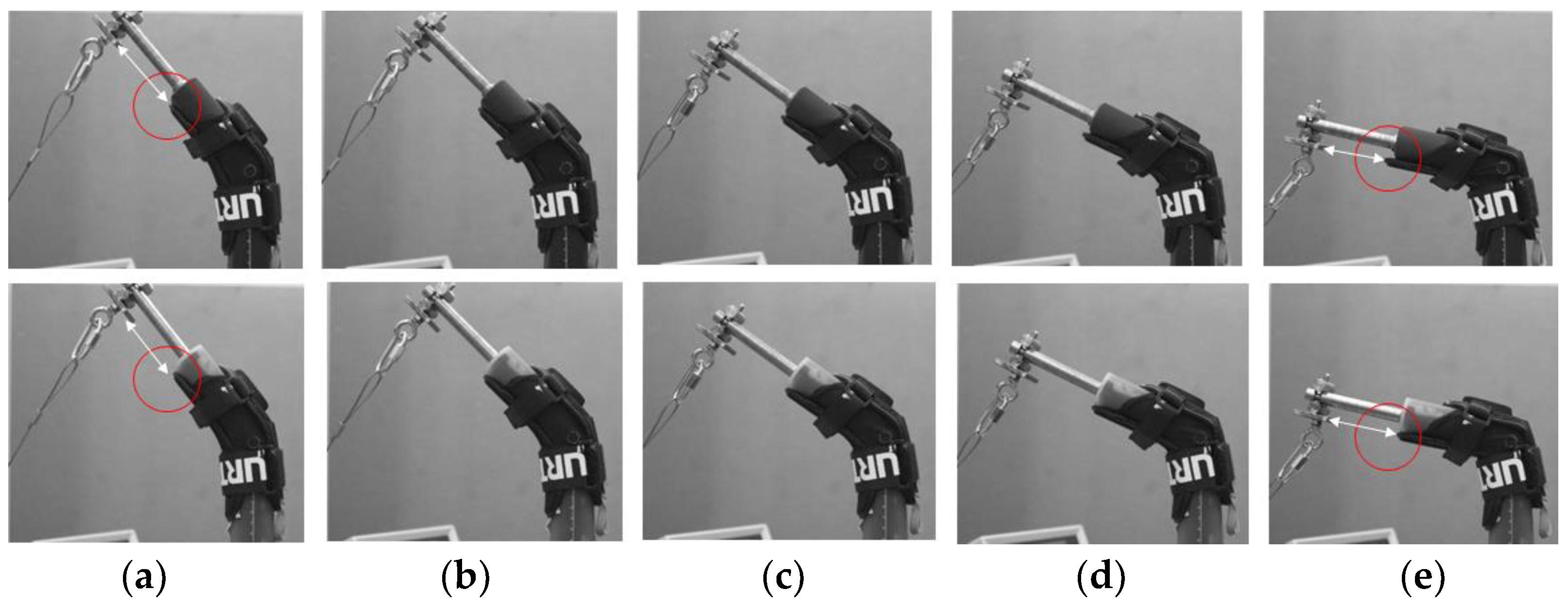
2.2. Bend Test
2.3. Data Analysis
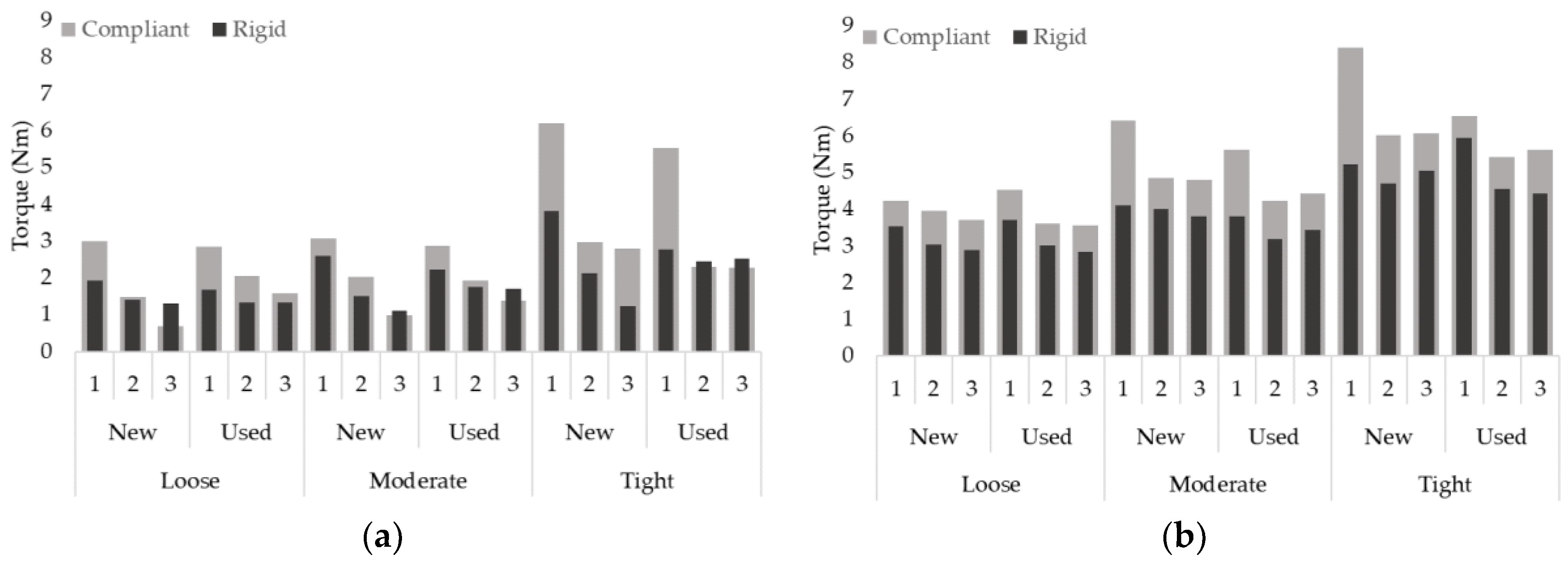
3. Results
4. Discussion
5. Conclusions
Funding
Acknowledgments
Conflicts of Interest
References
- Michel, F.I.; Schmitt, K.U.; Greenwald, R.M.; Russell, K.; Simpson, F.I.; Schulz, D.; Langran, M. White Paper: Functionality and efficacy of wrist protectors in snowboarding—Towards a harmonized international standard. Sports Eng. 2013, 16, 197–210. [Google Scholar] [CrossRef]
- Shultz, S.J.; Houglum, P.A.; Perrin, D.H. Wrist and Hand. In Examination of Musculoskeletal Injuries, 3rd ed.; Stone, J.J., Matz, K., Myrick, S., Eds.; Human Kinetics: Champaign, IL, USA, 2015; pp. 319–353. [Google Scholar]
- Levangie, P.K.; Norkin, C.C. The Wrist Complex. In Joint Structure and Function: A Comprehensive Analysis, 4th ed.; Davis Company: Philadelphia, FA, USA, 2000; pp. 305–352. [Google Scholar]
- Maurel, M.L.; Fitzgerald, L.G.; Miles, A.W.; Giddins, G.E. Biomechanical study of the efficacy of a new design of wrist guard. Clin. Biomech. 2013, 28, 509–513. [Google Scholar] [CrossRef] [PubMed]
- ISO. BS ISO EN 20320:2020. Protective Clothing for Use in Snowboarding—Wrist Protectors—Requirements and Test Methods; ISO: Geneva, Switzerland, 2020. [Google Scholar]
- BSI. BS EN 13061:2009. Protective Clothing. Shin Guards for Association Football Players. Requirements and Test Methods. British Standards Institution; BSI: London, UK, 2009. [Google Scholar]
- BSI. BS 6183-3:2000. Protective Equipment for Cricketers. Leg Protectors for Batsmen, Wicket-Keepers and Fielders, and Thigh, Arm and Chest Protectors for Batsmen; BSI: London, UK, 2000. [Google Scholar]
- Payne, T.; Mitchell, S.; Bibb, R.; Waters, M. Initial validation of a relaxed human soft tissue simulant for sports impact surrogates. Procedia Eng. 2014, 72, 533–538. [Google Scholar] [CrossRef]
- Adams, C.; James, D.; Senior, T.; Allen, T.; Hamilton, N. Development of a method for measuring quasi-static stiffness of snowboard wrist protectors. Procedia Eng. 2016, 147, 378–383. [Google Scholar] [CrossRef]
- Adams, C.; James, D.; Senior, T.; Allen, T.; Hamilton, N. Effect of surrogate design on the measured stiffness of snowboarding wrist protectors. Sports Eng. 2018, 21, 217–225. [Google Scholar] [CrossRef]
- BSI. BS EN 14120:2003+A1:2007. Protective Clothing—Wrist, Palm, Knee and Elbow Protectors for Users of Roller Sports Equipment—Requirements and Test Methods; BSI: London, UK, 2003. [Google Scholar]

Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Leslie, G.; Wang, W.; Winwood, K.; Liauw, C.; Hamilton, N.; Allen, T. Effect of Surrogate Surface Compliance on the Measured Stiffness of Snowboarding Wrist Protectors. Proceedings 2020, 49, 84. https://doi.org/10.3390/proceedings2020049084
Leslie G, Wang W, Winwood K, Liauw C, Hamilton N, Allen T. Effect of Surrogate Surface Compliance on the Measured Stiffness of Snowboarding Wrist Protectors. Proceedings. 2020; 49(1):84. https://doi.org/10.3390/proceedings2020049084
Chicago/Turabian StyleLeslie, Gemma, Weizhuo Wang, Keith Winwood, Chris Liauw, Nick Hamilton, and Tom Allen. 2020. "Effect of Surrogate Surface Compliance on the Measured Stiffness of Snowboarding Wrist Protectors" Proceedings 49, no. 1: 84. https://doi.org/10.3390/proceedings2020049084
APA StyleLeslie, G., Wang, W., Winwood, K., Liauw, C., Hamilton, N., & Allen, T. (2020). Effect of Surrogate Surface Compliance on the Measured Stiffness of Snowboarding Wrist Protectors. Proceedings, 49(1), 84. https://doi.org/10.3390/proceedings2020049084