2.1. Experimental Design
Experiments were conducted in the laboratory of the Sports Technology Institute (Loughborough University, UK). The infrared camera-based motion capture system Vicon MX T40 (Vicon Motion Systems, Oxford, UK) was used for testing, and provided resolutions of 2352 × 1728 pixels
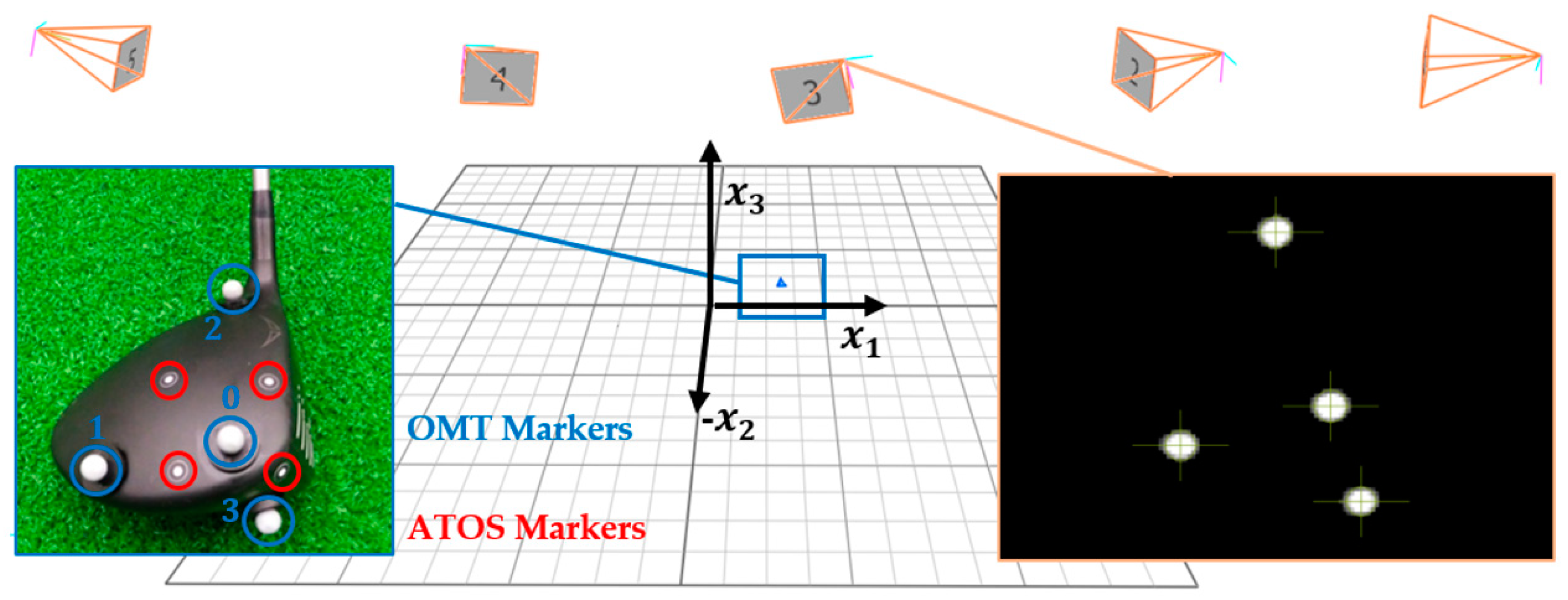
2 at a framerate of 370.37 fps. Five cameras were placed in line on an aluminium rail with the purpose of tracking a golf clubhead during delivery through the tee zone (see
Figure 1 for camera setup). Vicon lenses with
f = 18 mm were installed on the cameras and all apertures were set to
f/2. Vicon Nexus (Version 2.9.2.118349h) was used to calibrate the camera system and to collect data. In the given OMT system, camera shutter duration could not be adjusted directly. Therefore, to prevent blurring of images at high clubhead speeds, a low exposure time was set for the cameras. This was achieved by setting a high framerate together with a reduced strobe duration (‘Strobe Intensity’ = 0.5) of the infrared strobe ring [
5]. The experiments were conducted during night in order to keep the light conditions constant and minimise the effect of ambient daylight. To avoid distortion due to camera temperature changes, on each day of testing the system was allowed a one-hour warm-up at the same strobe intensity that was later used for calibration and capturing. A minimum of 4000 dynamic frames of the ‘Vicon Active Wand v2’ were captured to calibrate the full field-of-view of all cameras. All cameras provided residuals < 0.1 mm for ‘Image Errors’ and ‘World Errors’ [
5]. The system origin was defined as the imaginary tee position, with the
axis (Vicon
x-axis) aligning with the imaginary target line, and
(Vicon
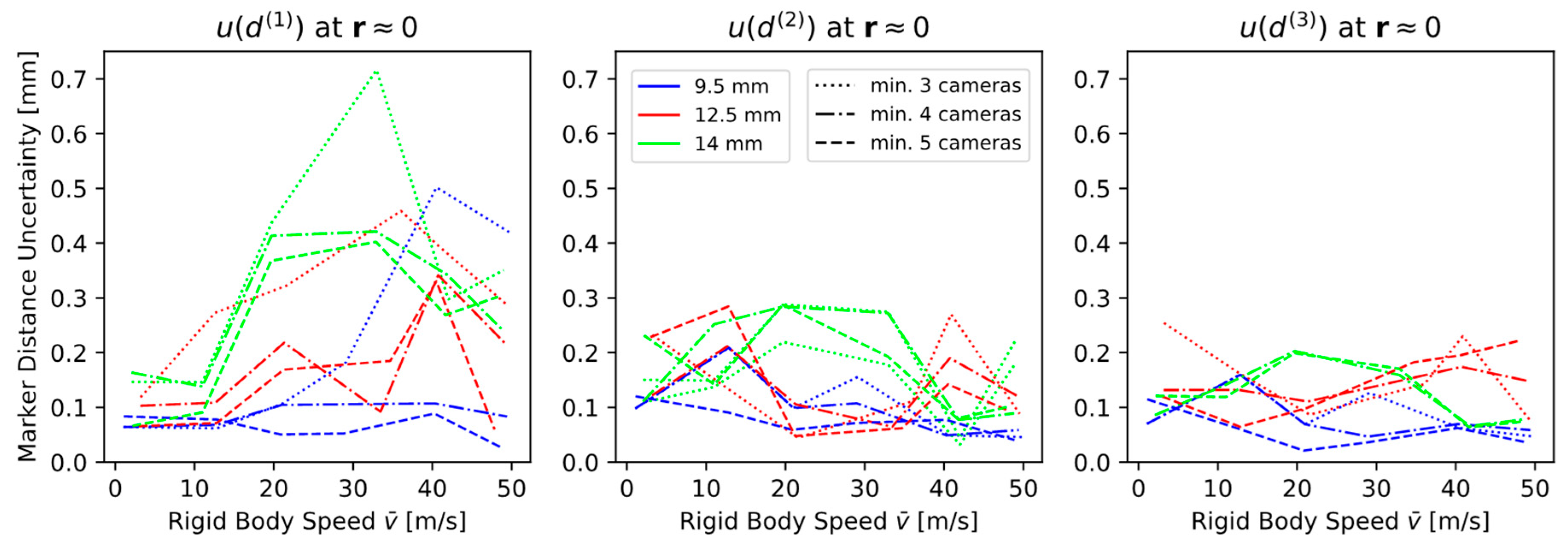
z-axis) aligning with the gravity vector. For marker reconstruction, the settings ‘Minimum Cameras to Start Trajectory’ and ‘Minimum Cameras to Continue Trajectory’ were adjusted equally to three, four or five in order to investigate their effect on tracking accuracy. Otherwise, default settings were used to automatically reconstruct and label the markers. Any mislabelling was corrected manually and no further post-processing, such as gap-filling or smoothing, was conducted.
A PING i20 driver clubhead, Ping Inc. (Phoenix, AZ, USA) was chosen as a suitable rigid body. Four marker locations on the clubhead were defined to approximate a local cartesian coordinate system, with the marker on the toe being the origin
and the other three markers (
) forming approximate orthogonal axes (see
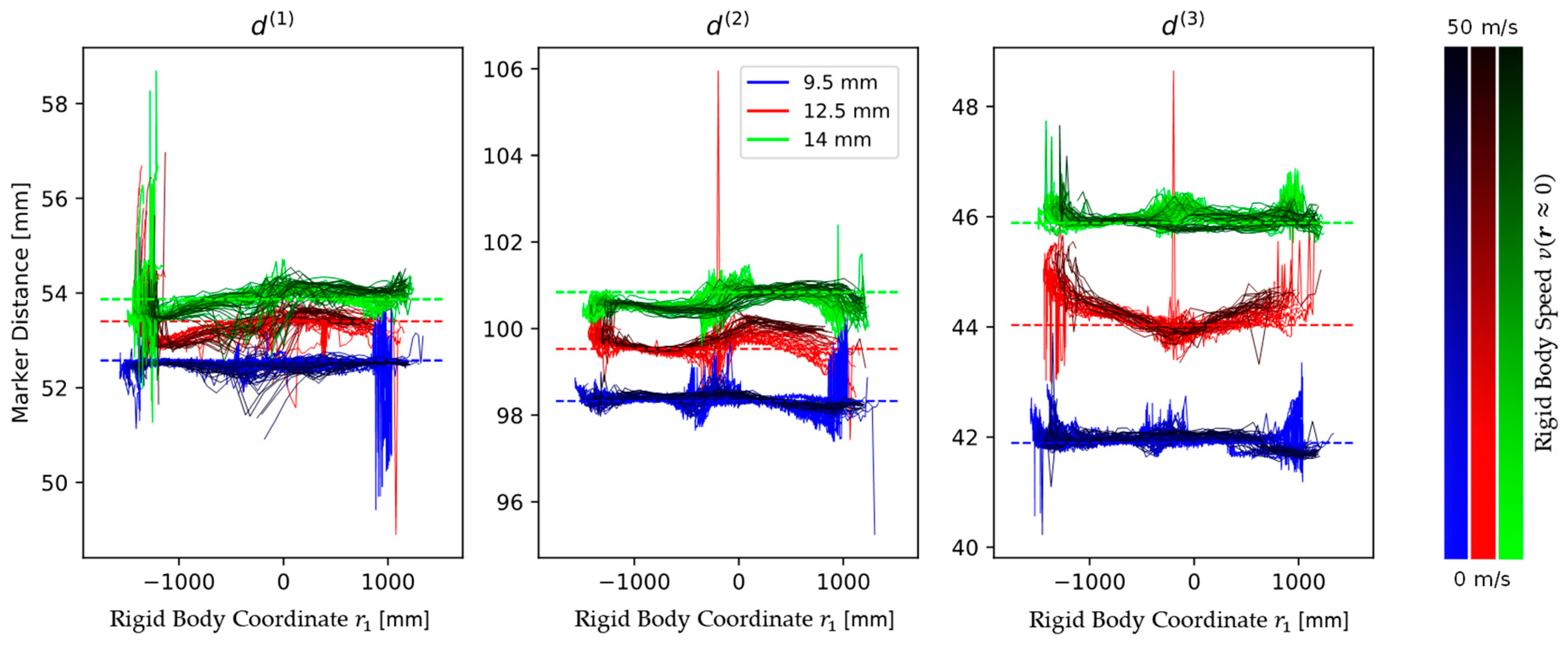
Figure 1). Angles between the axes were between 87.9° and 94.1°, with mean angle (SD) of 90.8° (2.2°). Distances between markers were varied to prevent the creation of equilateral triangles which may lead to mislabelling. Three commercially available retro-reflective marker sizes with nominal diameters of 9.5 mm, 12.5 mm and 14 mm were tested on three subsequent days. Measured diameters in the 2D camera images were between 5 pixels (9.5 mm, furthest camera) and 12 pixels (14 mm, closest camera). Before and after the test day, 10 repeated measures for the marker distances
) relative to the origin marker
were taken by the optical metrology system ATOS Core (GOM GmbH, Braunschweig, Germany). Four non-reflective flat markers (see
Figure 1) were used for aligning the 3D scans taken with the ATOS system. OMT measures of the distances
were obtained before and after each trial from one second of OMT data for the static rigid body positioned around the OMT system origin.
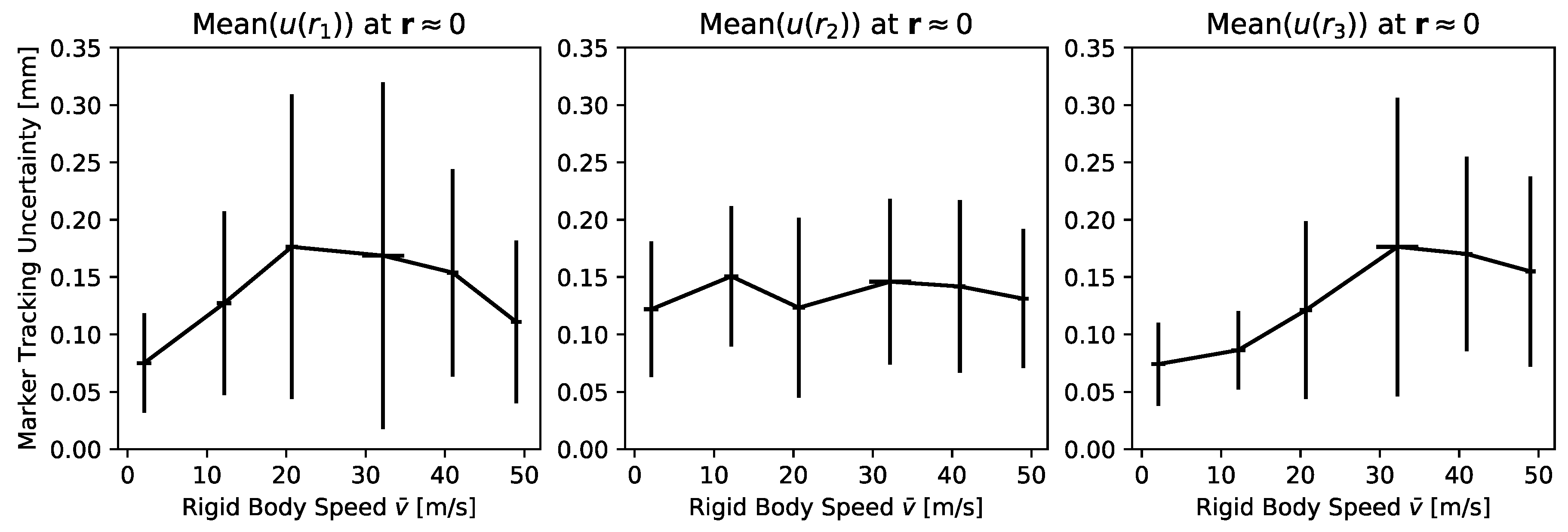
Each test day, an amateur golfer (handicap 16) performed 60 swings, 10 swings for each targeted swing speed of: 2, 10, 20, 30, 40 and 50 m/s. The rigid body trajectory and velocity () were calculated as an average of the four marker positions . Measured swing speeds at the tee position were on average (SD): 2.2 (0.8), 10.2 (3.3), 19.9 (1.6), 33.6 (3.5), 41.6 (2.0) and 48.3 (2.7) m/s. Note that does not represent a meaningful point on the club head, but ensured that the mathematical contributions of all marker trajectories were equal. The first rigid body coordinate was considered a representative scale for the clubhead path in the lower half of the swing, allowing the comparison of error behaviour throughout the swing at different speeds.
2.2. Statistical Analysis
Consider the positions of four fixed markers on a rigid body in 3D space,
with
. Distances between the four markers,
with
, are defined relative to the reference marker
. The error propagation formula for type-A uncertainties [
6] can be applied to the uncertainty in distance measures,
For each
, one error propagation equation according to (1) and (2) can be constructed. In the resulting system of three equations, all four positions
, all three distances
, and uncertainty in distances
, are considered as knowns, as they can be measured. The 12 uncertainty components
are unknown and sought to be found. Under the assumption that all points on the rigid body are tracked with the same component-wise uncertainty,
, the degrees of freedom of the problem reduces from 9 (12 unknowns minus 3 equations) to 0 (3 unknowns minus 3 equations), and hence can be solved. Together with equation (2), the problem simplifies to the equation system,
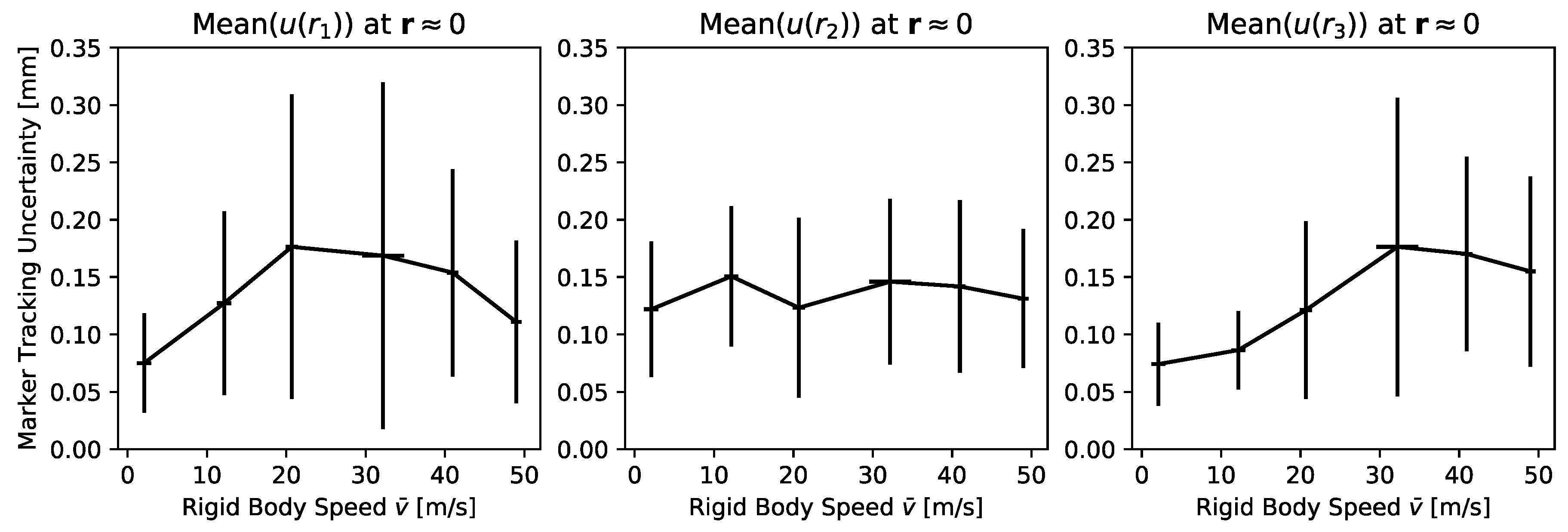
Note that orthogonality is not a requirement for the distance vectors formed by the four markers. However, it may increase the validity of the method. As marker tracking uncertainty changes along spatial coordinates, in a dynamic scenario cannot be calculated from subsequent frames. Therefore, needs to be calculated across a sample with the same expectation value. In this case, within a set of trials of equal target swing speed, the frames closest to the origin (tee position) were picked and was defined as the standard deviation (SD) of . The equation system (3) was solved numerically for every trial using a least-squares method. The boundaries of accepted solutions for were set from 1 µm to 10 mm, which was necessary to avoid non-physical solutions, such as complex or negative . Solutions at the boundaries were discarded as they were considered as biased. Due to the resulting data gaps in the solutions of , the investigation of OMT system settings was conducted by means of the marker distance uncertainty . Paired t-tests were conducted with a significance level of p = 0.05 to identify optimal OMT system settings. From the marker tracking uncertainty components , mean and SD were calculated across trials of equal target speed. Pearson’s r was calculated to assess the correlation of marker tracking uncertainty with marker speed.





{kind=link}
{kind=link}
{kind=link}
{kind=link}