Kinematic Analysis of Figure Skating Jump by Using Wearable Inertial Measurement Units †

Abstract
:1. Introduction
2. Materials and Methods
2.1. Participant
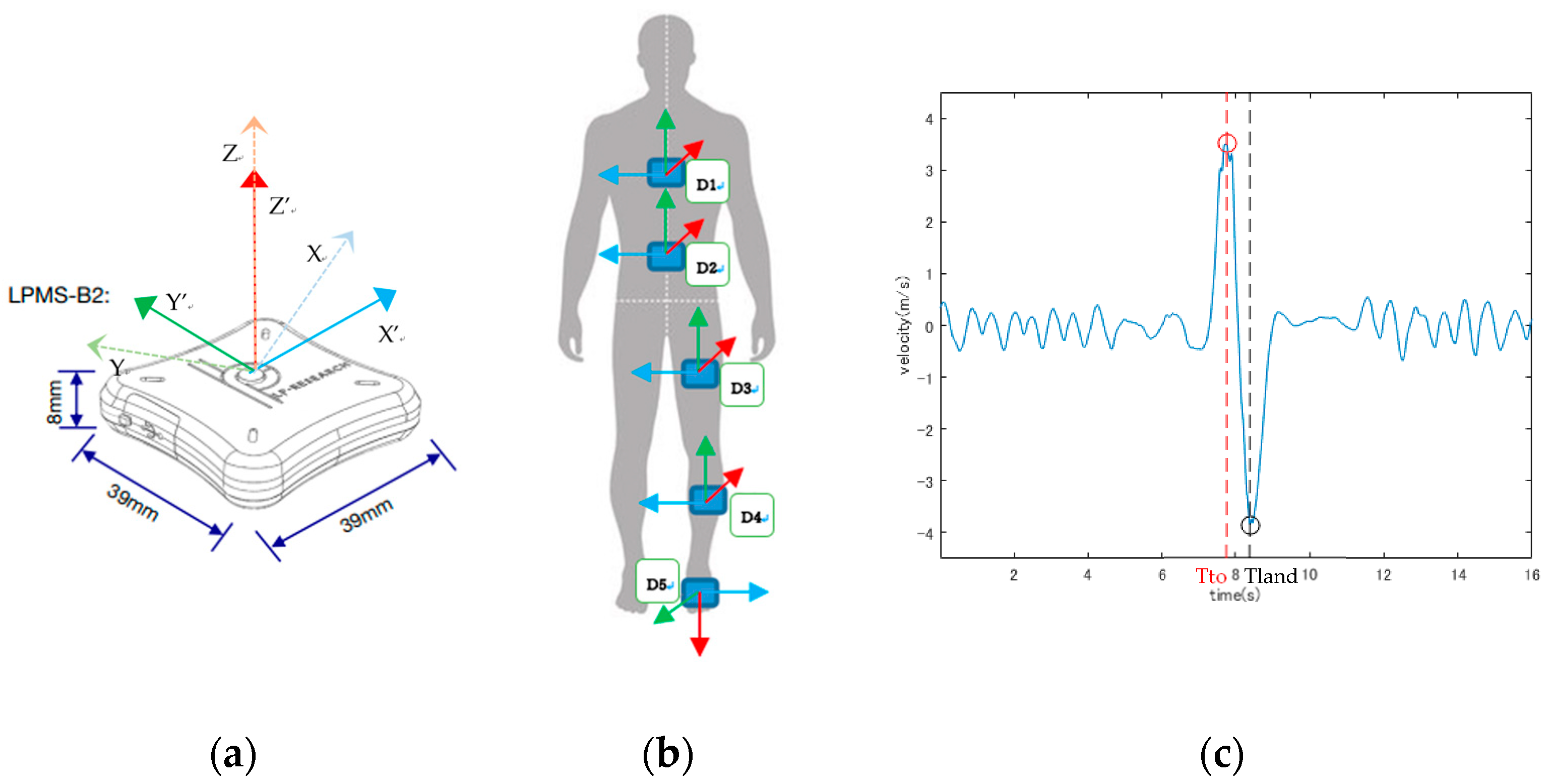
2.2. Data Collection
2.3. Data Processing
- Horizontal velocity (HV): horizontal component of velocity at Tto, calculated using magnitude of resultant velocity and VV from D2.
- Flight Height (FH): maximum height during flight phase, calculated using FT from D2 (, where is the acceleration of gravity).
- Take-off angle (ToA): angle between the resultant velocity vector and the horizontal plane at Tto, calculated using the magnitude of VV and HV from D2.
- Take-off Tilt (ToT): relative angle between longitude axis of the body (Y’-axis of D2) and the vertical axis (Z-axis) at Tto, calculated using X’-axis Euler angle from D2.
- Time to the tightest position (TtoTP): time to the moment when the skater achieved his maximum rotation speed during flight phase from Tto, calculated using Y’-axis angular velocity from D2.
- Revolutions in the air (RinA): revolutions performed during flight time, calculated using Z’-axis Euler angle from D2.
- Angular velocity (AV): average angular velocity during flight phase, calculated using RinA and FT.
2.4. Statistical Analysis
3. Results
4. Discussion
5. Conclusions
Author Contributions
Acknowledgments
Conflicts of Interest
References
- Albert, W.J.; Miller, D.I. Takeoff characteristics of single and double axel figure skating jumps. J. Appl. Biomech. 1996, 12, 72–87. [Google Scholar] [CrossRef]
- King, D.L.; Arnold, A.S.; Smith, S.L. A kinematic comparison of single, double, and triple axels. J. Appl. Biomech. 1994, 10, 51–60. [Google Scholar] [CrossRef]
- King, D.; Smith, S.; Higginson, B.; Muncasy, B.; Scheirman, G. Characteristics of triple and quadruple toe-loops performed during the Salt Lake City 2002 Winter Olympics. Sports. Biomech. 2004, 3, 109–123. [Google Scholar] [CrossRef] [PubMed]
- Knoll, K.; Hildebrand, F. Optimum movement co-ordination in multi-revolution jumps in figure skating. In Proceedings of the ISBS-Conference Proceedings Archive, Konstanz, Germany, 21–25 July 1998; Vieten, R., Ed.; [Google Scholar]
- King, D. A biomechanical analysis of successful and unsuccessful quadruple toe loop figure skating jumps. Med. Sci. Sports. Exerc. 2002, 34, 101. [Google Scholar] [CrossRef]
- Schafer, K.; Brown, N.; Alt, W. MISSE-A new method to analyse performance parameters of figure skating jumps. In Proceedings of the ISBS-Conference Proceedings Archive, Tsukuba, Japan, 18–22 July 2016. [Google Scholar]
- Bruening, D.A.; Reynolds, R.E.; Adair, C.W.; Zapalo, P.; Ridge, S.T. A sport-specific wearable jump monitor for figure skating. PLoS ONE 2018, 13, e0206162. [Google Scholar] [CrossRef] [PubMed]
- Marins, J.L.; Yun, X.; Bachmann, E.R.; McGhee, R.B.; Zyda, M.J. An extended Kalman filter for quaternion-based orientation estimation using MARG sensors. In Proceedings of the 2001 IEEE/RSJ International Conference on Intelligent Robots and Systems, Expanding the Societal role of Robotics in the Next Millennium (Cat. No. 01CH37180), Maui, HI, USA, 29 October–3 November 2001; Volume 4, pp. 2003–2011. [Google Scholar]
- Tomarken, A.J.; Serlin, R.C. Comparison of ANOVA alternatives under variance heterogeneity and specific noncentrality structures. Psychol. Bull. 1986, 99, 90. [Google Scholar] [CrossRef]

{kind=link}
| FT (s) | VV (m/s) | FH (m) | AV (Degree/s) | HV (m/s) | |
| 1F | 0.48 ± 0.01 ††† | 1.94 ± 0.24 ††† | 0.28 ± 0.01 ††† | 399.81 ± 26.31 ††† | 4.31 ± 0.18 ††† |
| 2F | 0.54 ± 0.03 *** | 3.35 ± 0.11 *** | 0.36 ± 0.03 *** | 849.48 ± 35.65 *** | 2.78 ± 0.27 *** |
| 3Fo | 0.62 ± 0.07 ⋇⋇ | 3.71 ± 0.24 ⋇⋇⋇ | 0.48 ± 0.10 ⋇⋇ | 1071.44 ± 47.00 ⋇⋇⋇ | 2.97 ± 0.98 |
| ToA (Degree) | ToT (Degree) | TtoTP (s) | RinA (Revolution) | ||
| 1F | 25.17 ± 2.53 ††† | 50.19 ± 5.77 ††† | 0.08 ± 0.09 ††† | 0.53 ± 0.03 ††† | |
| 2F | 49.74 ± 2.44 *** | 38.65 ± 7.81 ** | 0.20 ± 0.05 ** | 1.28 ± 0.08 *** | |
| 3Fo | 51.45 ± 9.56 | 32.08 ± 12.61 | 0.42 ± 0.08 ⋇⋇⋇ | 1.84 ± 0.13 ⋇⋇⋇ | |
| DiffAV (tho-ple) (Degree/s) | DiffAV (ple-thi) (Degree/s) | DiffAV (thi-sha) (degree/s) | DiffAV (sha-sol) (degree/s) | ||
| 1F | −826.51 ± 78.61▿ | 467.72 ± 116.10 *** | −195.75 ± 352.64 | −169.78 ± 188.34 | |
| 2F | −1056.52 ± 245.44 | 825.95 ± 151.25 | −433.60 ± 99.95 | −310.57 ± 197.13 | |
| 3Fo | −1131.87 ± 381.82 | 749.55 ± 466.01 | −286.65 ± 224.10 | −308.92 ± 331.32 |
| FT (s) | VV (m/s) | FH (m) | AV (Degree/s) | HV (m/s) | |
| 3Fo | 0.62 ± 0.07 | 3.71 ± 0.24 | 0.48 ± 0.10 | 1071.44 ± 47.00 | 2.97 ± 0.98 |
| 3Fx | 0.53 ± 0.04 | 3.77 ± 0.41 | 0.34 ± 0.05 | 1048.22 ± 119.27 | 2.91 ± 0.97 |
| ToA (degree) | ToT (degree) | TtoTP (s) | RinA (revolution) | ||
| 3Fo | 51.45 ± 9.56 | 32.08 ± 12.61 | 0.42 ± 0.08 | 1.84 ± 0.13 | |
| 3Fx | 25.17 ± 2.53 | 51.64 ± 14.29 | 0.37 ± 0.06 | 1.67 ± 0.07 | |
| DiffAV(tho-ple) (Degree/s) | DiffAV(ple-thi) (Degree/s) | DiffAV (thi-sha) (Degree/s) | DiffAV(sha-sol) (Degree/s) | ||
| 3Fo | −1131.87 ± 381.82 | 749.55 ± 466.01 | −286.65 ± 224.10 | −308.92 ± 331.32 | |
| 3Fx | −805.58 ± 342.48 | 960.58 ± 401.46 | −708.82 ± 294.10 | −306.89 ± 435.55 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Shi, Y.; Ozaki, A.; Honda, M. Kinematic Analysis of Figure Skating Jump by Using Wearable Inertial Measurement Units. Proceedings 2020, 49, 124. https://doi.org/10.3390/proceedings2020049124
Shi Y, Ozaki A, Honda M. Kinematic Analysis of Figure Skating Jump by Using Wearable Inertial Measurement Units. Proceedings. 2020; 49(1):124. https://doi.org/10.3390/proceedings2020049124
Chicago/Turabian StyleShi, Yuchen, Atsushi Ozaki, and Masaaki Honda. 2020. "Kinematic Analysis of Figure Skating Jump by Using Wearable Inertial Measurement Units" Proceedings 49, no. 1: 124. https://doi.org/10.3390/proceedings2020049124
APA StyleShi, Y., Ozaki, A., & Honda, M. (2020). Kinematic Analysis of Figure Skating Jump by Using Wearable Inertial Measurement Units. Proceedings, 49(1), 124. https://doi.org/10.3390/proceedings2020049124