Detection of Transverse Defects in Rails Using Noncontact Laser Ultrasound †

Abstract
:1. Introduction
2. Materials and Methods
2.1. Material Properties
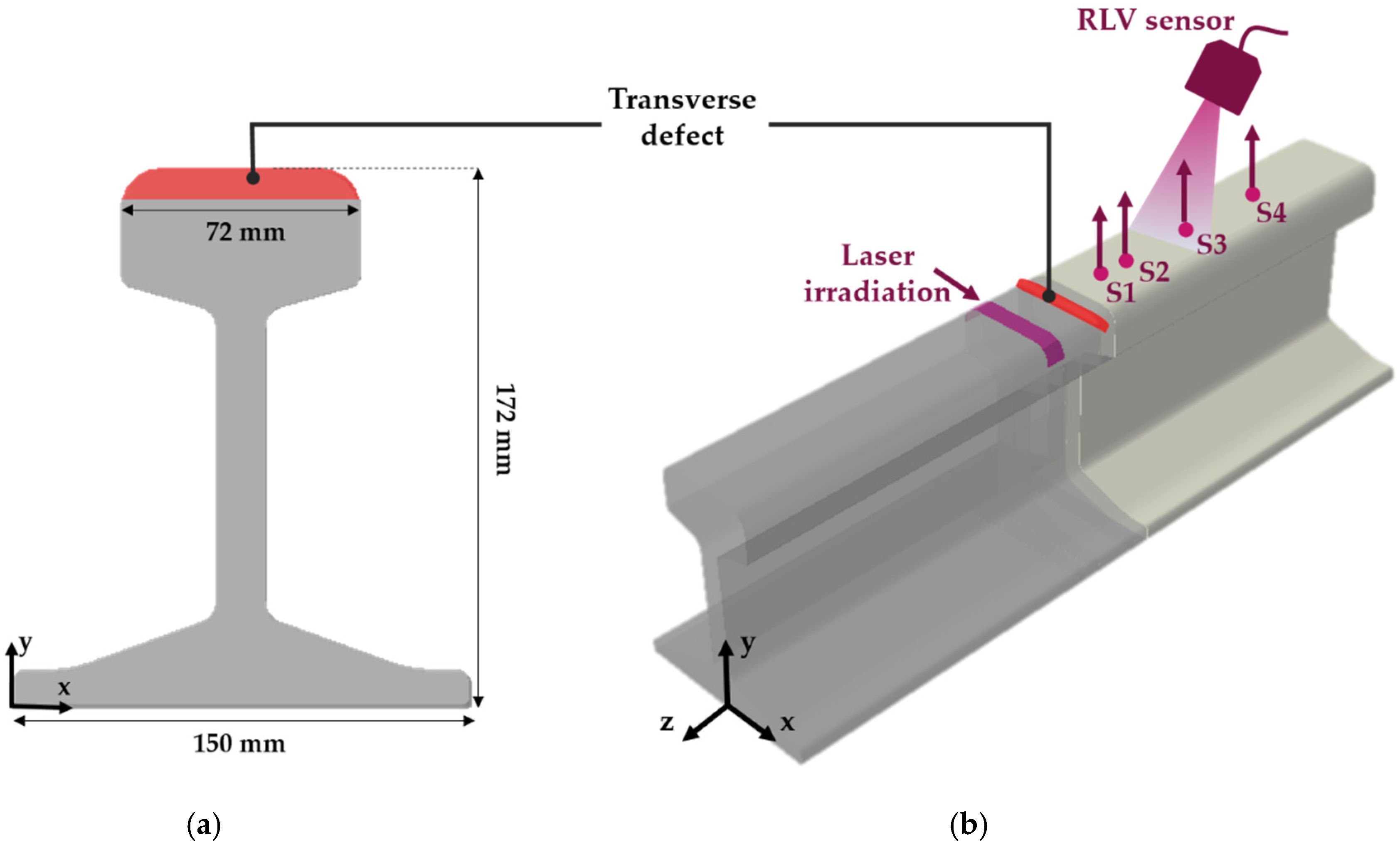
2.2. Defect Geometry
2.3. Rail Inspection Method
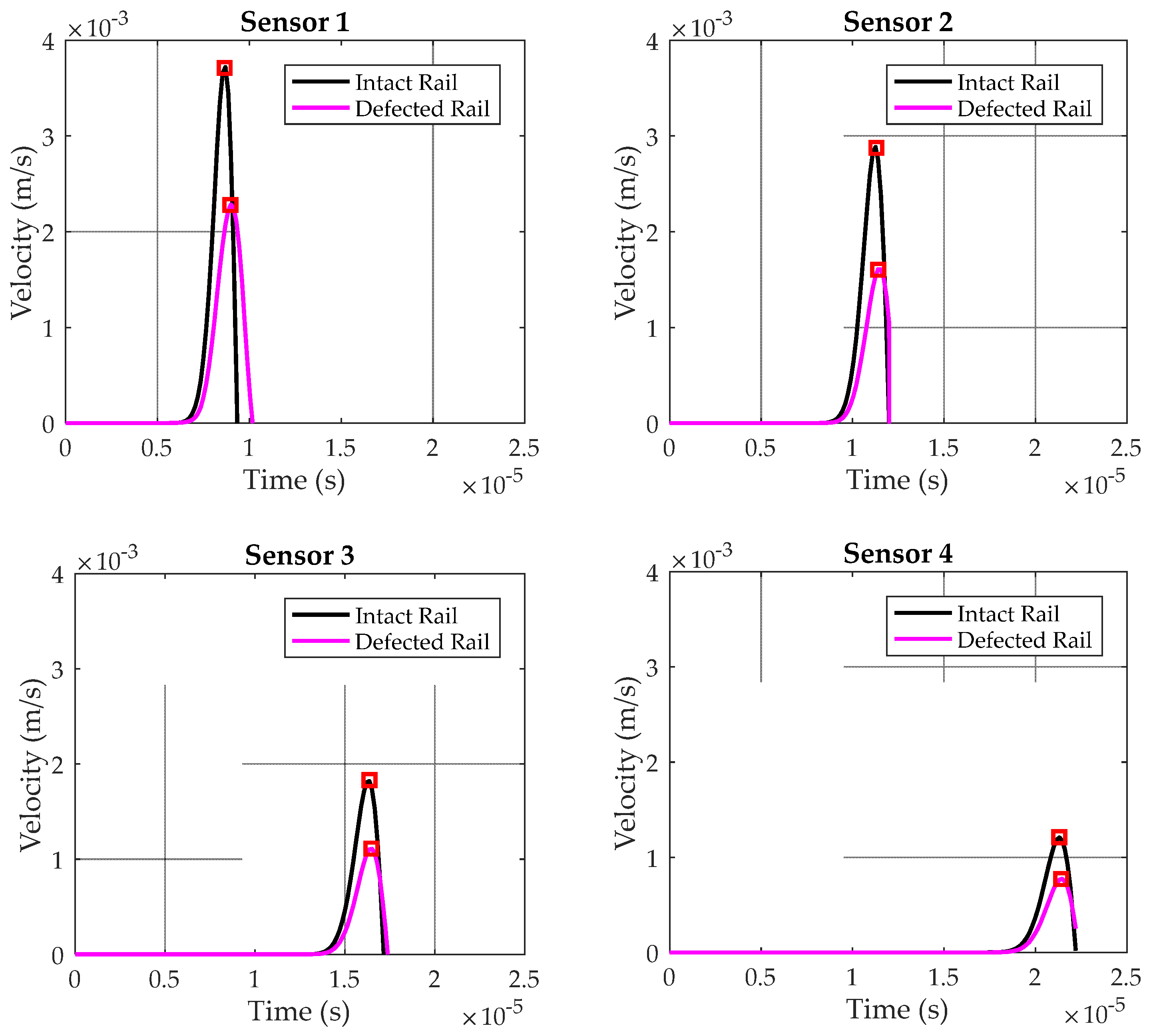
3. Results and Discussion
4. Conclusions
References
- Scalea, F.; Rizzo, P.; Coccia, S.; Bartoli, I.; Fateh, M.; Viola, E.; Pascale, G. Non-contact ultrasonic inspection of rails and signal processing for automatic defect detection and classification. Insight-NDT and condition monitoring. Insight Non-Destr. Test. Condition Monit. 2005, 45, 346–353. [Google Scholar] [CrossRef]
- Toliyat, H.A.; Abbaszadeh, K.; Rahimian, M.M.; Olson, L.E. Rail defect diagnosis using wavelet packet decomposition. IEEE Trans. Ind. Appl. 2003, 39, 1454–1461. [Google Scholar] [CrossRef]
- Cerniglia, D.; Garcia, G.; Kalay, S. Application of laser induced ultrasound for rail inspection. In Proceedings of the Seventh World Congress on Railway Research (WCRR), Montreal, QC, Canada, 4–8 June 2006. [Google Scholar]
- Rizzo, P. Sensing solutions for assessing and monitoring railroad tracks. In Sensor Technologies for Civil Infrastructures; Woodhead Publishing Limited: Cambridge, UK, 2014. [Google Scholar]

{kind=link}
{kind=link}
| Material Properties | Value |
|---|---|
| Young’s Modulus (GPa) | 210 |
| Density (kg/m3) | 7800 |
| Poisson’s ratio | 0.3 |
| Conductivity (W/(m.K)) | 50.2 |
| Specific Heat (J/kg K) | 490 |
| Defect Volume in (mm3) | Defect Length in x | Defect Width in z | Defect Depth in y |
|---|---|---|---|
| 700 | 72 mm | 2 mm | 5 mm |
| Sensor 1 | Sensor 2 | Sensor 3 | Sensor 4 | |
|---|---|---|---|---|
| Distance from the transverse defect | 15 mm | 30 mm | 60 mm | 90 mm |
| Distance from the excitation zone | 50 mm | 65 mm | 95 mm | 125 mm |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Benzeroual, H.; Khamlichi, A.; Zakriti, A. Detection of Transverse Defects in Rails Using Noncontact Laser Ultrasound. Proceedings 2020, 42, 43. https://doi.org/10.3390/ecsa-6-06556
Benzeroual H, Khamlichi A, Zakriti A. Detection of Transverse Defects in Rails Using Noncontact Laser Ultrasound. Proceedings. 2020; 42(1):43. https://doi.org/10.3390/ecsa-6-06556
Chicago/Turabian StyleBenzeroual, Hajar, Abdellatif Khamlichi, and Alia Zakriti. 2020. "Detection of Transverse Defects in Rails Using Noncontact Laser Ultrasound" Proceedings 42, no. 1: 43. https://doi.org/10.3390/ecsa-6-06556
APA StyleBenzeroual, H., Khamlichi, A., & Zakriti, A. (2020). Detection of Transverse Defects in Rails Using Noncontact Laser Ultrasound. Proceedings, 42(1), 43. https://doi.org/10.3390/ecsa-6-06556