A UAV and Blockchain-Based System for Industry 4.0 Inventory and Traceability Applications †




Abstract
:1. Introduction
2. Design and Implementation of the System
2.1. Communications Architecture
- Public. It is not required the approval of an entity to join the blockchain. Anyone can publish and validate transactions. Public blockchains can be useful in certain industrial scenarios where a high level of transparency is necessary or where massive device interaction is required.
- Private. The participation in the blockchain is regulated by the owner. Therefore, such an owner decides on issues like the mining rewards or who can access the network.
- Consortium or federated. In this type of blockchain, a group of owners operate the blockchain. They restrict user access to the network and the actions performed by the participants. In fact, the consensus algorithm is usually run by a pre-selected group of nodes, which increases transaction privacy and accelerates transaction validation. This can be the case of groups of industrial companies (e.g., suppliers) that work on the same field and that have to exchange and validate transactions: each entity may have its own validation node and when a minimum amount of nodes approves a transaction, it is added to the blockchain.

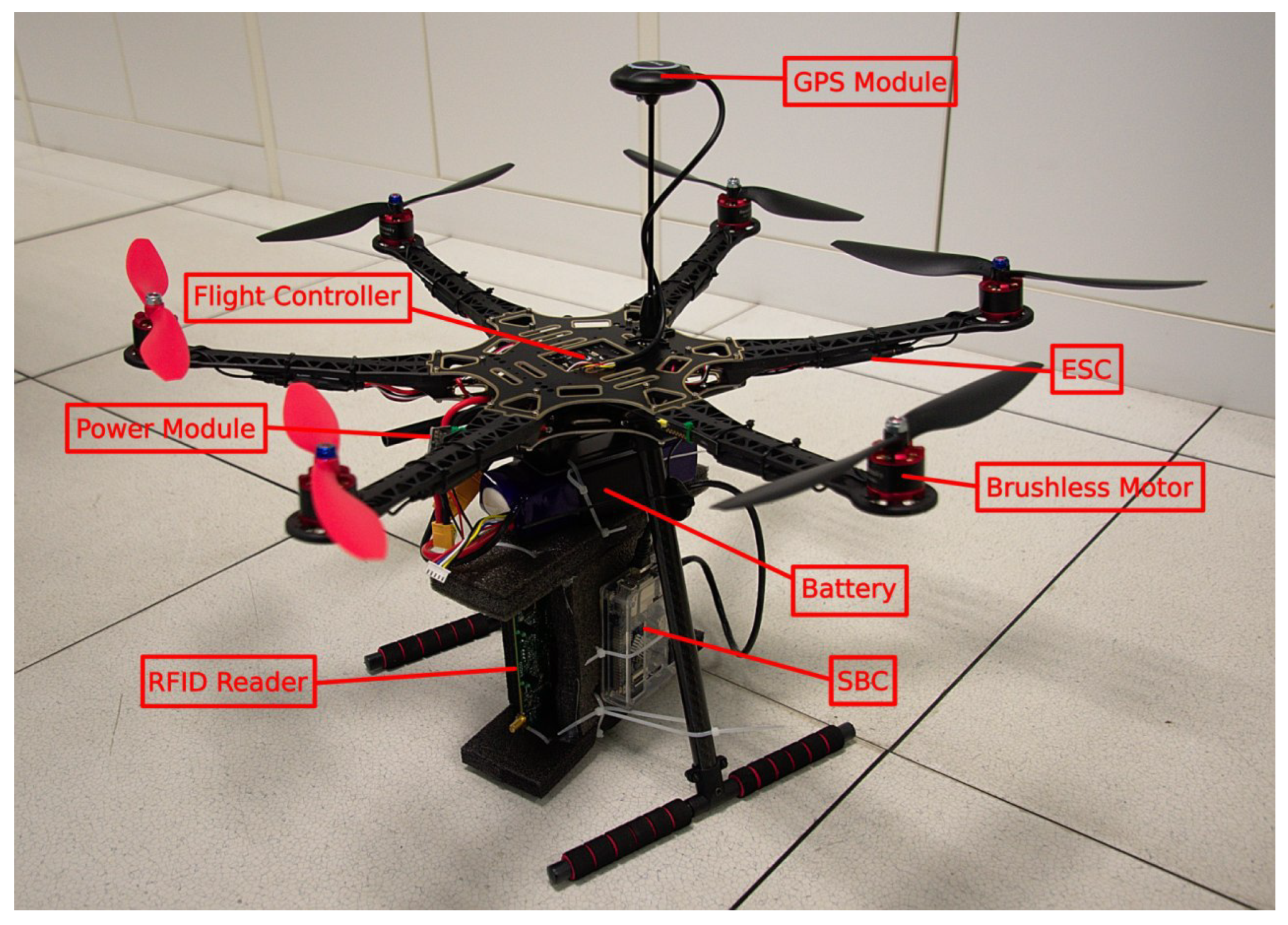
2.2. UAV Implementation
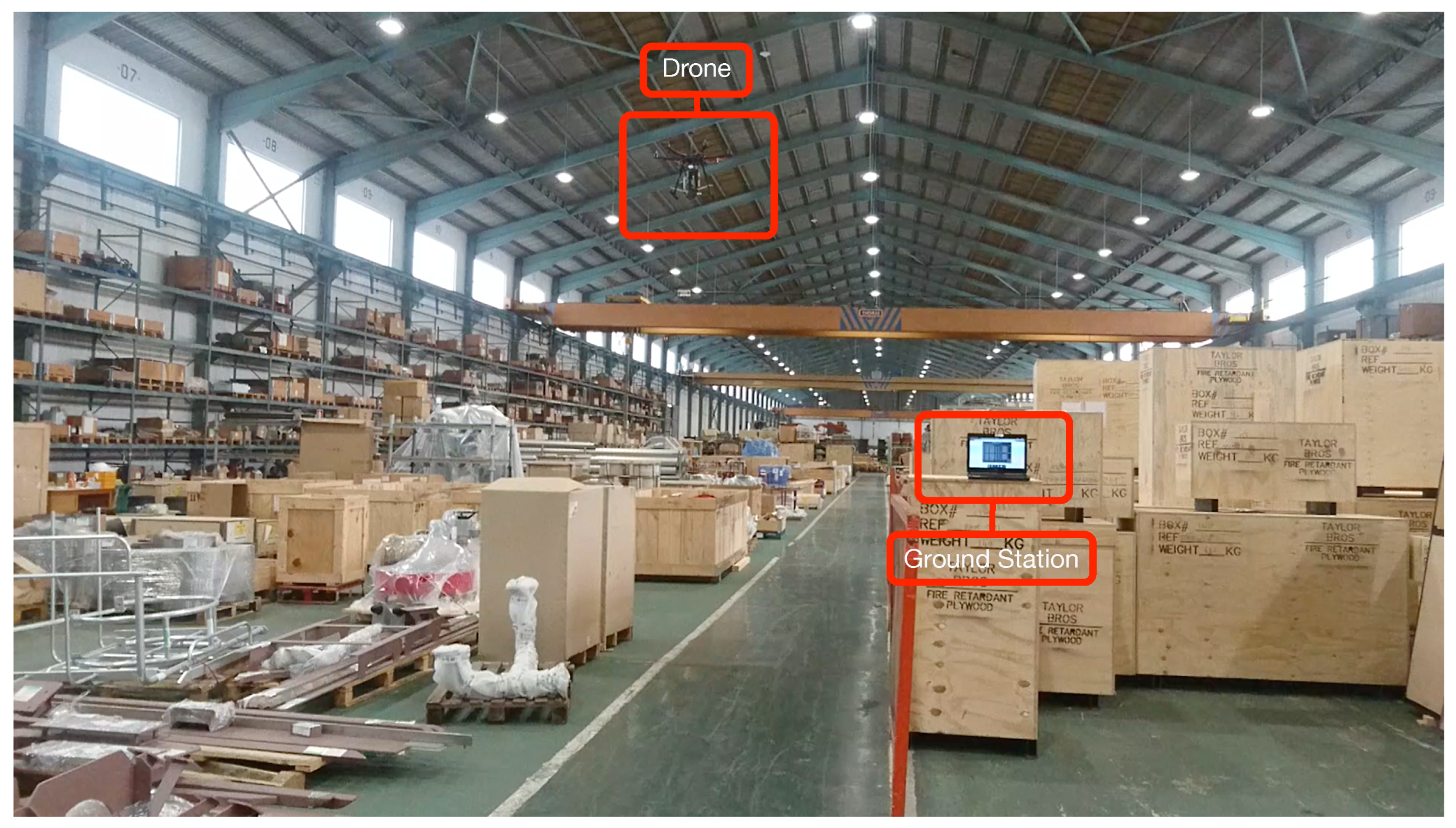
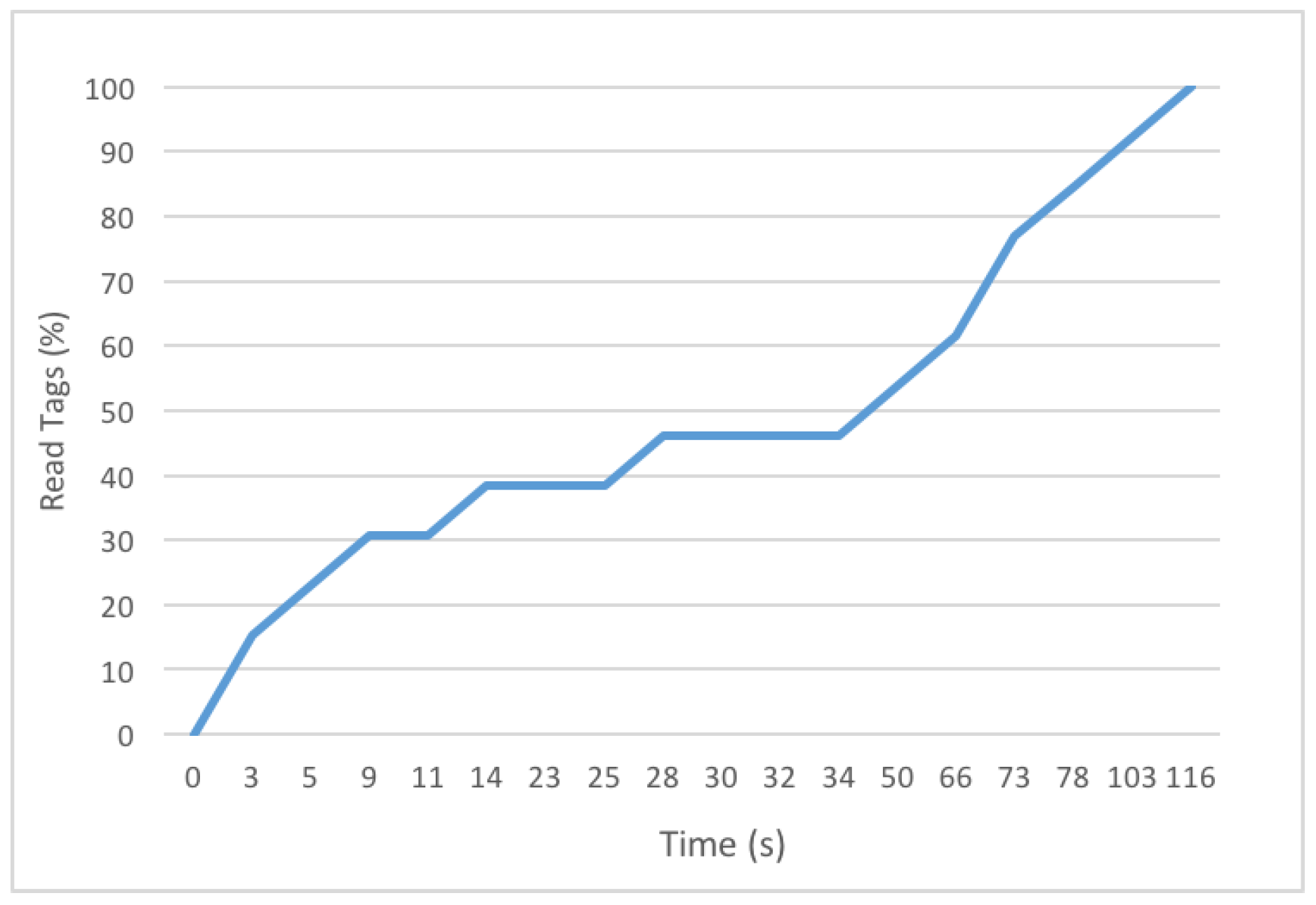
3. Experiments
4. Conclusions
Author Contributions
Acknowledgments
Conflicts of Interest
References
- Blanco-Novoa, Ó.; Fernández-Caramés, T.M.; Fraga-Lamas, P.; Vilar-Montesinos, M.A. A Practical Evaluation of Commercial Industrial Augmented Reality Systems in an Industry 4.0 Shipyard. IEEE Access 2018, 6, 8201–8218. [Google Scholar] [CrossRef]
- Fraga-Lamas, P.; Fernández-Caramés, T.M.; Blanco-Novoa, Ó.; Vilar-Montesinos, M.A. A Review on Industrial Augmented Reality Systems for the Industry 4.0 Shipyard. IEEE Access 2018, 6, 13358–13375. [Google Scholar] [CrossRef]
- Fernández-Caramés, T.M.; Fraga-Lamas, P.; Suárez-Albela, M.; Díaz-Bouza, M.A. A Fog Computing Based Cyber-Physical System for the Automation of Pipe-Related Tasks in the Industry 4.0 Shipyard. Sensors 2018, 18, 1961. [Google Scholar] [CrossRef] [PubMed]
- Fernández-Caramés, T.M.; Fraga-Lamas, P.; Suárez-Albela, M.; Vilar-Montesinos, M. A Fog Computing and Cloudlet Based Augmented Reality System for the Industry 4.0 Shipyard. Sensors 2018, 18, 1798. [Google Scholar] [CrossRef] [PubMed]
- Fernández-Caramés, T.M.; Fraga-Lamas, P. A Review on Human-Centered IoT-Connected Smart Labels for the Industry 4.0. IEEE Access 2018, 6, 25939–25957. [Google Scholar] [CrossRef]
- Fraga-Lamas, P.; Fernández-Caramés, T.M.; Castedo, L. Towards the Internet of Smart Trains: A Review on Industrial IoT-Connected Railways. Sensors 2017, 17, 1457. [Google Scholar] [CrossRef] [PubMed]
- Shakhatreh, H.; Sawalmeh, A.; Al-Fuqaha, A.; Dou, Z.; Almaita, E.; Khalil, I.; Othman, N.S.; Khreishah, A.; Guizani, M. Unmanned Aerial Vehicles: A Survey on Civil Applications and Key Research Challenges. arXiv 2018, arXiv:1805.00881. [Google Scholar] [CrossRef]
- Hassanalian, M.; Abdelkefi, A. Classifications, applications, and design challenges of drones: A review. Prog. Aerosp. Sci. 2017, 91, 99–131. [Google Scholar] [CrossRef]
- Hardis Group, EyeSee Official Webpage. Available online: http://www.eyesee-drone.com (accessed on 17 October 2018).
- Geodis and Delta Drone Official Communication. Available online: www.goo.gl/gzeYV7 (accessed on 17 October 2018).
- DroneScan Official Webpage. Available online: www.dronescan.co (accessed on 17 October 2018).
- Beul, M.; Droeschel, D.; Nieuwenhuisen, M.; Quenzel, J.; Houben, S.; Behnke, S. Fast Autonomous Flight in Warehouses for Inventory Applications. IEEE Robot. Autom. Lett. 2018, 3, 3121–3128. [Google Scholar] [CrossRef]
- Fernández-Caramés, T.M.; Fraga-Lamas, P. A Review on the Use of Blockchain for the Internet of Things. IEEE Access 2018, 6, 32979–33001. [Google Scholar] [CrossRef]
- Kapitonov, A.; Lonshakov, S.; Krupenkin, A.; Berman, I. Blockchain-based protocol of autonomous business activity for multi-agent systems consisting of UAVs. In Proceedings of the 2017 Workshop on Research, Education and Development of Unmanned Aerial Systems (RED-UAS), Linkoping, Sweden, 3–5 October 2017; pp. 84–89. [Google Scholar]
- Ardupilot Official Web Page. Available online: http://ardupilot.org/ardupilot/ (accessed on 17 October 2018).


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Components | Relevant Features |
|---|---|
| Flight controllers | Pixhawk 2.4.8 |
| STM32F427 microcontroller | |
| STM32F103 coprocessor | |
| Sensors | L3GD20 3-axis digital gyroscope |
| LSM303D 3-axis accelerometer and magnetometer | |
| MPU6000 6-axis accelerometer and magnetometer | |
| MS5607 barometer | |
| GPS M8N | |
| RFID reading system | NPR Active Track-2 |
| OrangePI PC Plus (SBC) | |
| Additional components | Frame with six arms 550 mm wingspan |
| Brushless motors 920 Kv | |
| ESCs Simonk 30 A | |
| Propellers 10 inch of diameter and 45 inch of pitch | |
| Battery: 5 Ah (capacity) and 45 c-rate (discharge rate) |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Fernández-Caramés, T.M.; Blanco-Novoa, O.; Suárez-Albela, M.; Fraga-Lamas, P. A UAV and Blockchain-Based System for Industry 4.0 Inventory and Traceability Applications. Proceedings 2019, 4, 26. https://doi.org/10.3390/ecsa-5-05758
Fernández-Caramés TM, Blanco-Novoa O, Suárez-Albela M, Fraga-Lamas P. A UAV and Blockchain-Based System for Industry 4.0 Inventory and Traceability Applications. Proceedings. 2019; 4(1):26. https://doi.org/10.3390/ecsa-5-05758
Chicago/Turabian StyleFernández-Caramés, Tiago M., Oscar Blanco-Novoa, Manuel Suárez-Albela, and Paula Fraga-Lamas. 2019. "A UAV and Blockchain-Based System for Industry 4.0 Inventory and Traceability Applications" Proceedings 4, no. 1: 26. https://doi.org/10.3390/ecsa-5-05758
APA StyleFernández-Caramés, T. M., Blanco-Novoa, O., Suárez-Albela, M., & Fraga-Lamas, P. (2019). A UAV and Blockchain-Based System for Industry 4.0 Inventory and Traceability Applications. Proceedings, 4(1), 26. https://doi.org/10.3390/ecsa-5-05758