UAV Trajectory Management: Ardupilot Based Trajectory Management System †


{kind=link}
{kind=link}
Abstract
:1. Introduction
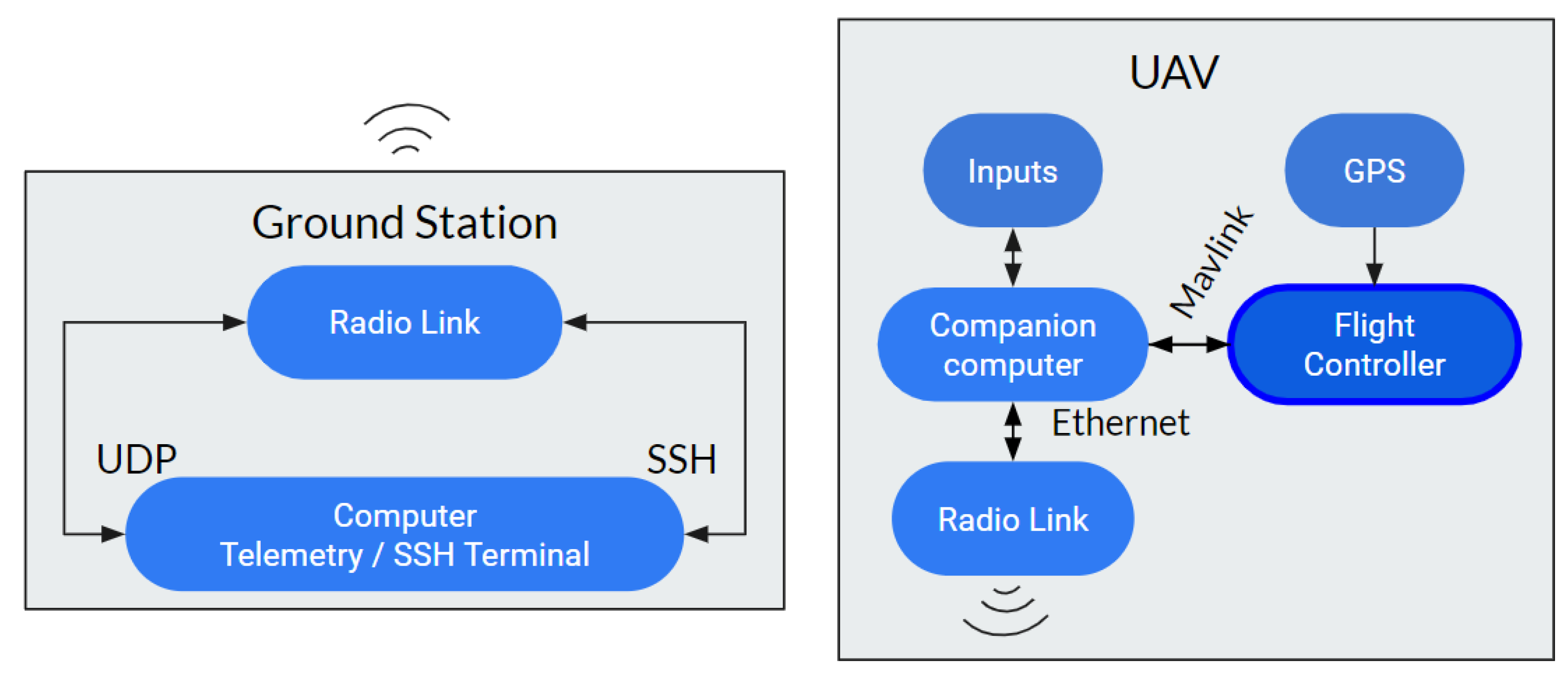
2. System Definition
References
- Brief, L. Growth Opportunity in Global uav Market. Available online: https://www.lucintel.com/GrowthOpportunityinGlobalUAVMarket.pdf (accessed on 12 July 2019).
- Idries, A.; Mohamed, N.; Jawhar, I.; Mohamed, F.; Al-Jaroodi, J. Challenges of developing UAV applications: A project management view. In Proceedings of the 2015 International Conference on Industrial Engineering and Operations Management, Dubai, UAE, 3–5 March 2015; IEEE: Piscataway, NJ, USA, 2015; pp. 389–398. [Google Scholar]

Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Pita, J.L.; Saavedra, F.O. UAV Trajectory Management: Ardupilot Based Trajectory Management System. Proceedings 2019, 21, 8. https://doi.org/10.3390/proceedings2019021008
Pita JL, Saavedra FO. UAV Trajectory Management: Ardupilot Based Trajectory Management System. Proceedings. 2019; 21(1):8. https://doi.org/10.3390/proceedings2019021008
Chicago/Turabian StylePita, Javier Losada, and Félix Orjales Saavedra. 2019. "UAV Trajectory Management: Ardupilot Based Trajectory Management System" Proceedings 21, no. 1: 8. https://doi.org/10.3390/proceedings2019021008
APA StylePita, J. L., & Saavedra, F. O. (2019). UAV Trajectory Management: Ardupilot Based Trajectory Management System. Proceedings, 21(1), 8. https://doi.org/10.3390/proceedings2019021008