As the only power device of the aircraft, the aero-engine has been paid special attention [
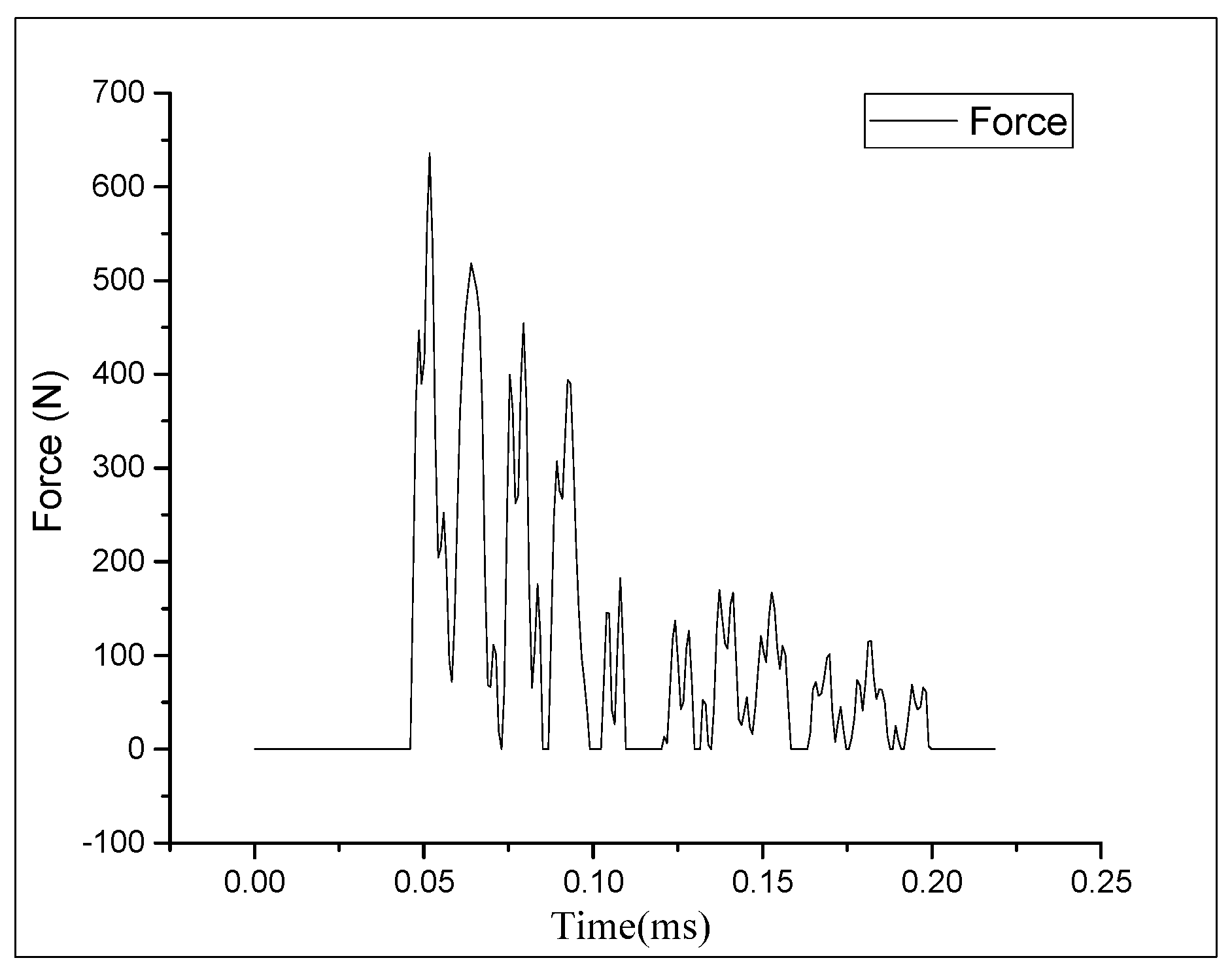
1], and its stability is closely related to the safety of the aircraft. However, the engine is often impacted by foreign objects, including runway gravel, birds, wrenches, bolts and so on, which result to serious damage to the engine and danger to occupants. Zhang and Fei [
2] investigated the birdstrike on the engine fan blades and found that engine damage was significant relationship with birdstrike locations. Ma et al. [
3] analyzed the vibration characteristics of the engine blades under impact load and the results showed that both blade rotation speed and aerodynamic force had a significant influence on the vibration response. Structure damping coefficient is an important parameter for vibration response. The traditional experimental measurement method [
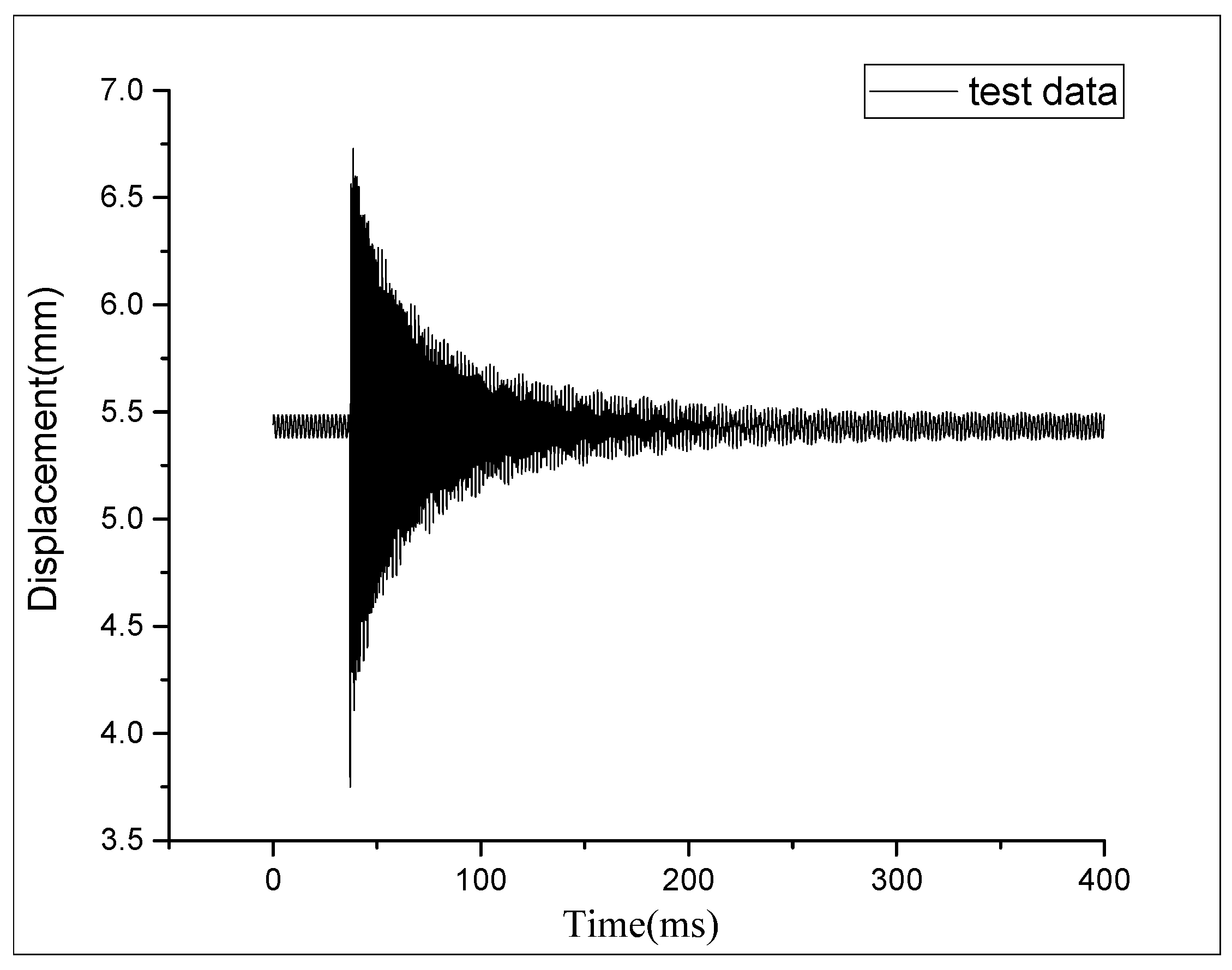
4] is to obtain the logarithm reduction rate of the damped oscillator through the damping vibration curve first, and then obtain the time constant and structure damping coefficient. Lee and Sun et al. [
5] found that the vibration frequency and damping coefficient of the composite beam were directly related to the fiber and matrix damage of the composite material, but it was only a qualitative result. Wolfenden et al. [
6] proposed an experimental technique for determining structural damping in a vacuum environment, but this method was only used for materials with low natural frequency. To address this issue, this study proposes a new structural damping determining method based on BP neural network combined with experiments and simulations.
Artificial neural networks (ANN) are powerful tools for prediction of nonlinearities. These mathematical models comprise individual processing units called neurons that resemble neural activity. Each processing unit sums weighted inputs and then applies a linear or nonlinear function to the resulting sum to determine the output. One ANN which has received most attention is the backpropagation network (BP neural network) [
7]. BP neural network is a multi-layer feed-forward neural network that uses back-propagation algorithm to adjust network weights. It can be proved that a three-layer BP network can realize arbitrary continuous function mapping with arbitrary precision. The BP neural network is widely used. Liu Jun et al. [
8] applied BP neural network to determine the parameters of the bird body modeled by smoothed particle hydrodynamics, which were consistent with the experimental results. Wang et al. [
9] applied BP neural network to establish a flood forecasting model based on traditional hydrological data. Ma et al. [
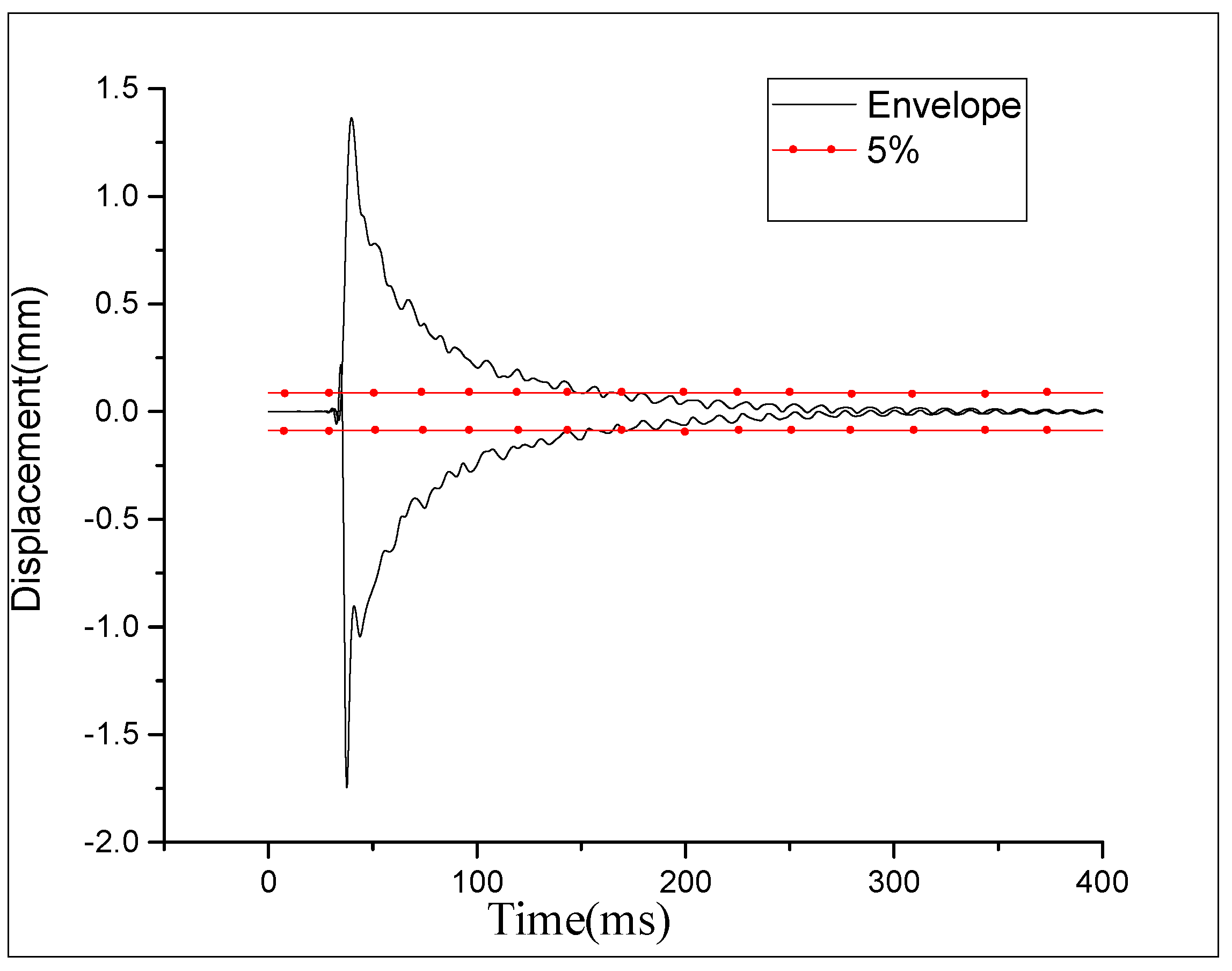
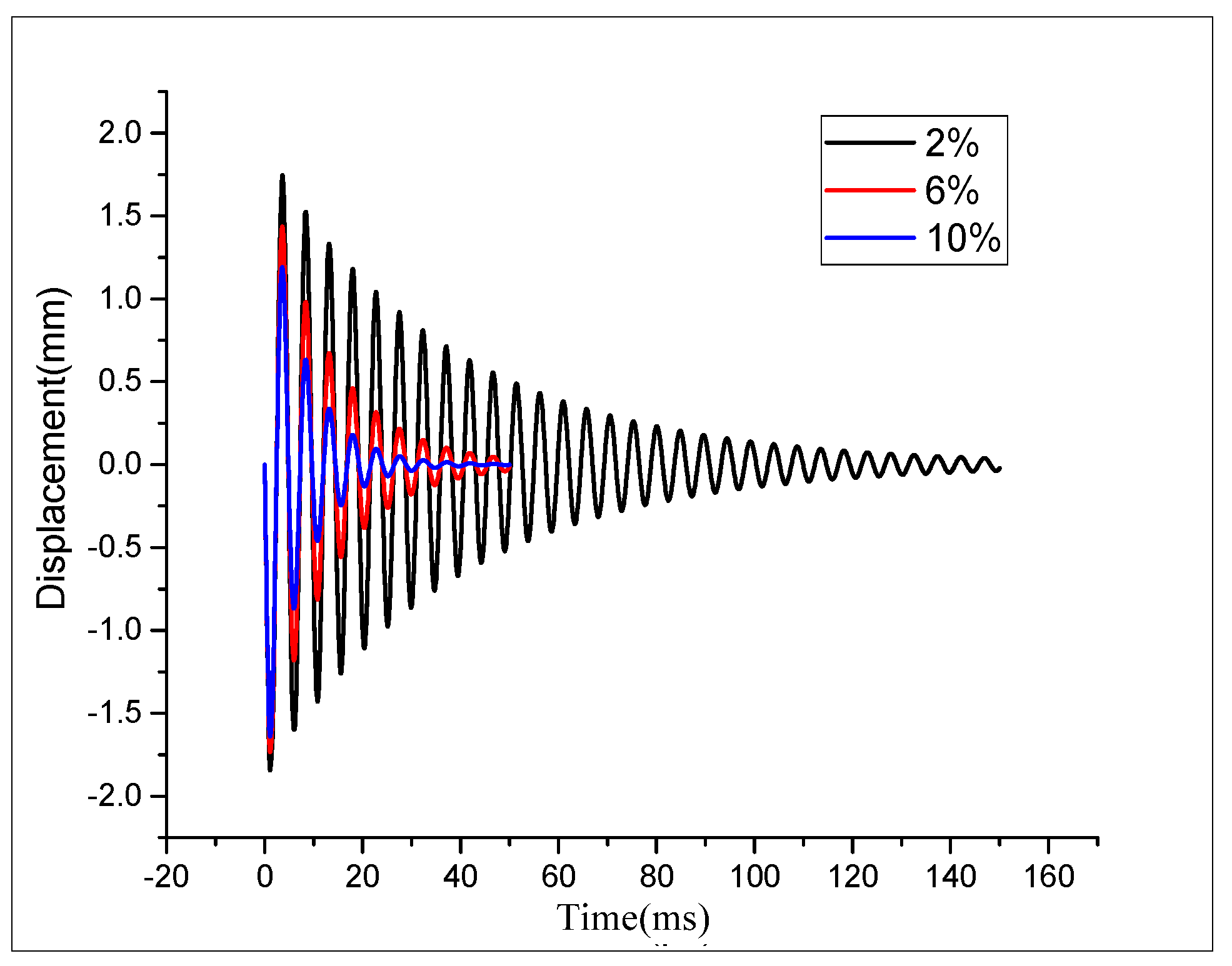
10] used BP neural network to optimize the control algorithm of the wheeled robot. In this study, the amplitude and decay time of twenty different damping coefficient models are taken as the input layer, and the damping coefficient of the model is taken as the output layer. The weight of the hidden layer is adjusted through the back-propagation of the cost function to obtain the weight matrix. Then the amplitude and decay time of the real structure response are input in the input layer, the damping coefficient of the real structure is obtained at the output layer.



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}