Research on Integration of Indoor and Outdoor Positioning in Professional Athletic Training †

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Methods
2.1. GNSS & IMU
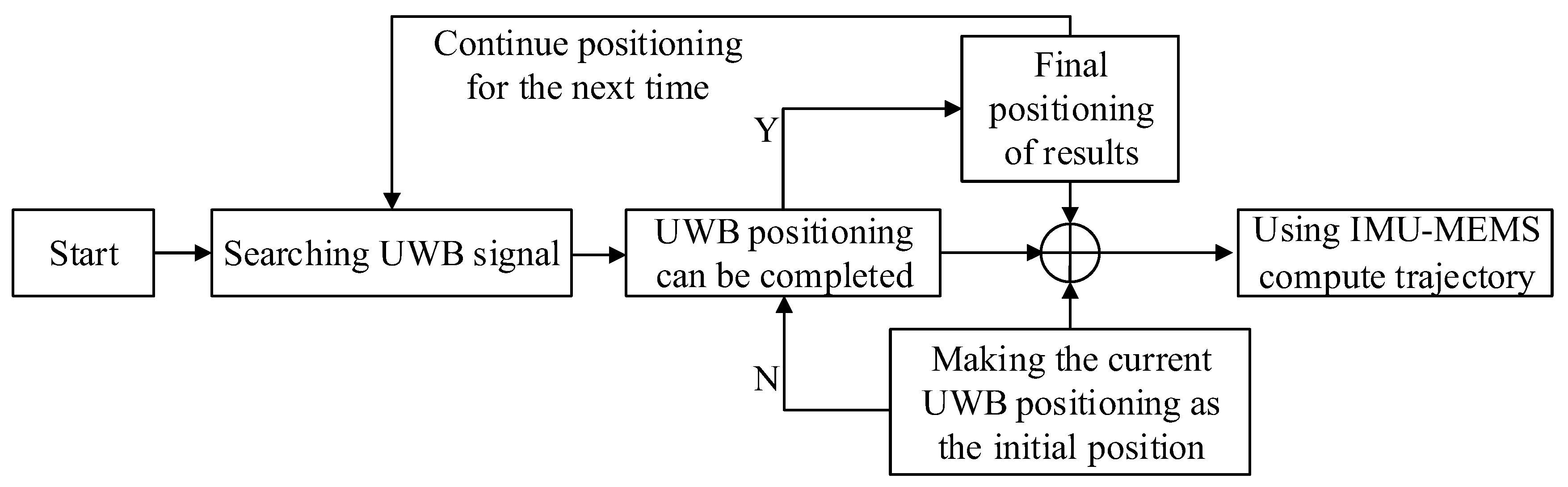
2.2. UWB & IMU
2.3. Adaptive Positioning Switching
- (1)
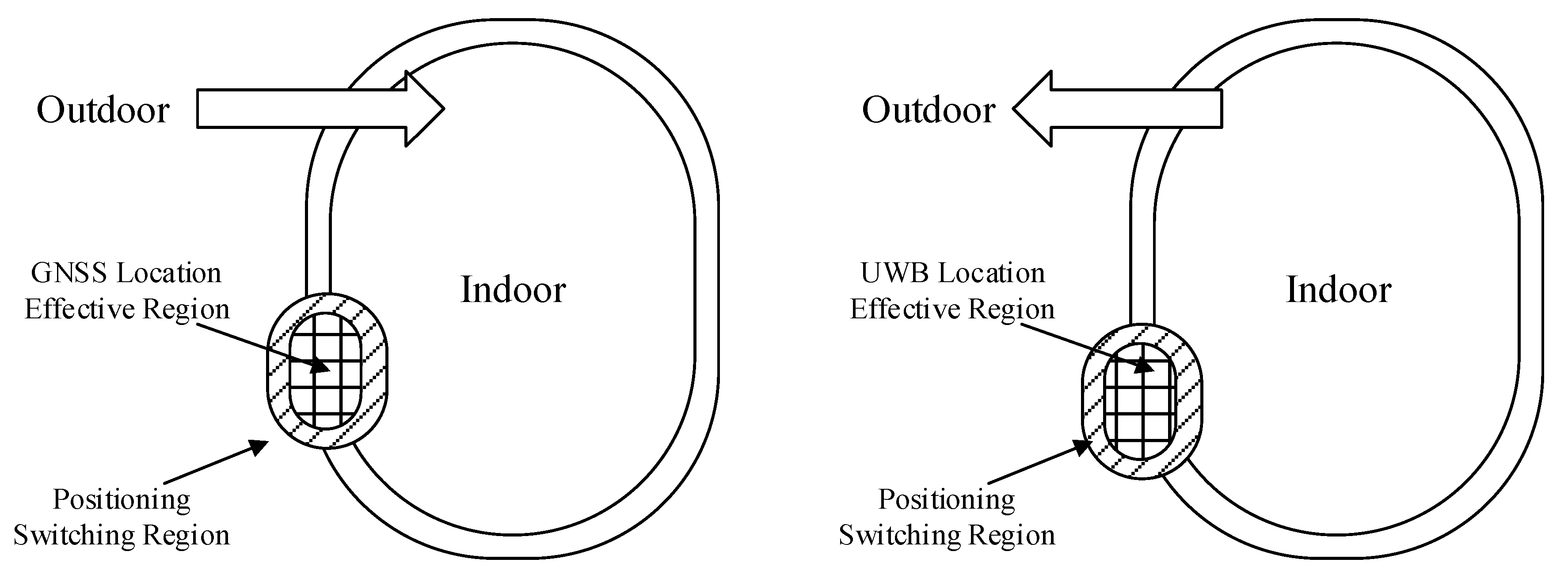
- According to the boundary area of indoor and outdoor environment, the location transition region is set based on the coverage of two types of positioning signals in the overlap region.
- (2)
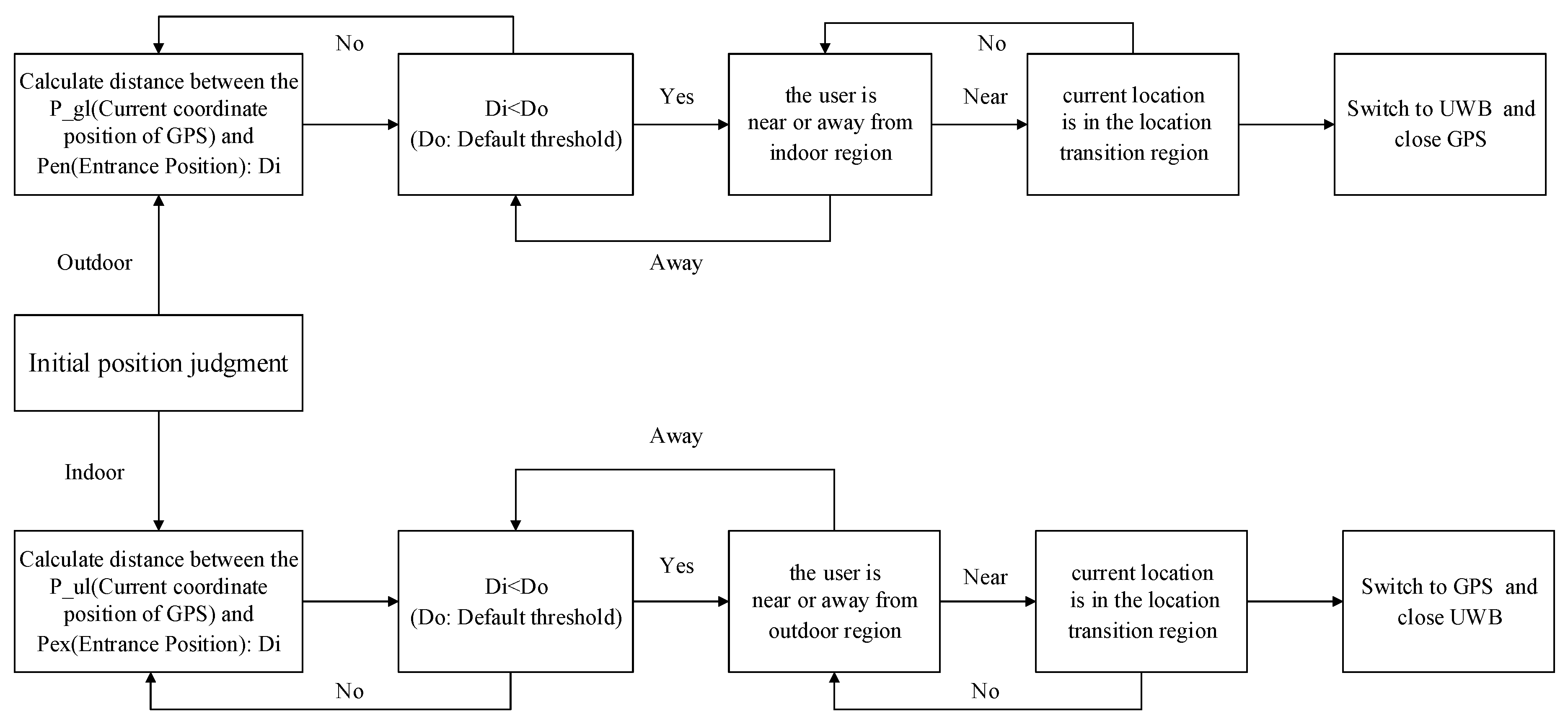
- By comparing the pre-set threshold value with the current calculation value, and combining the corresponding switching rules in the system, the adaptive switching of indoor and outdoor location is achieved.
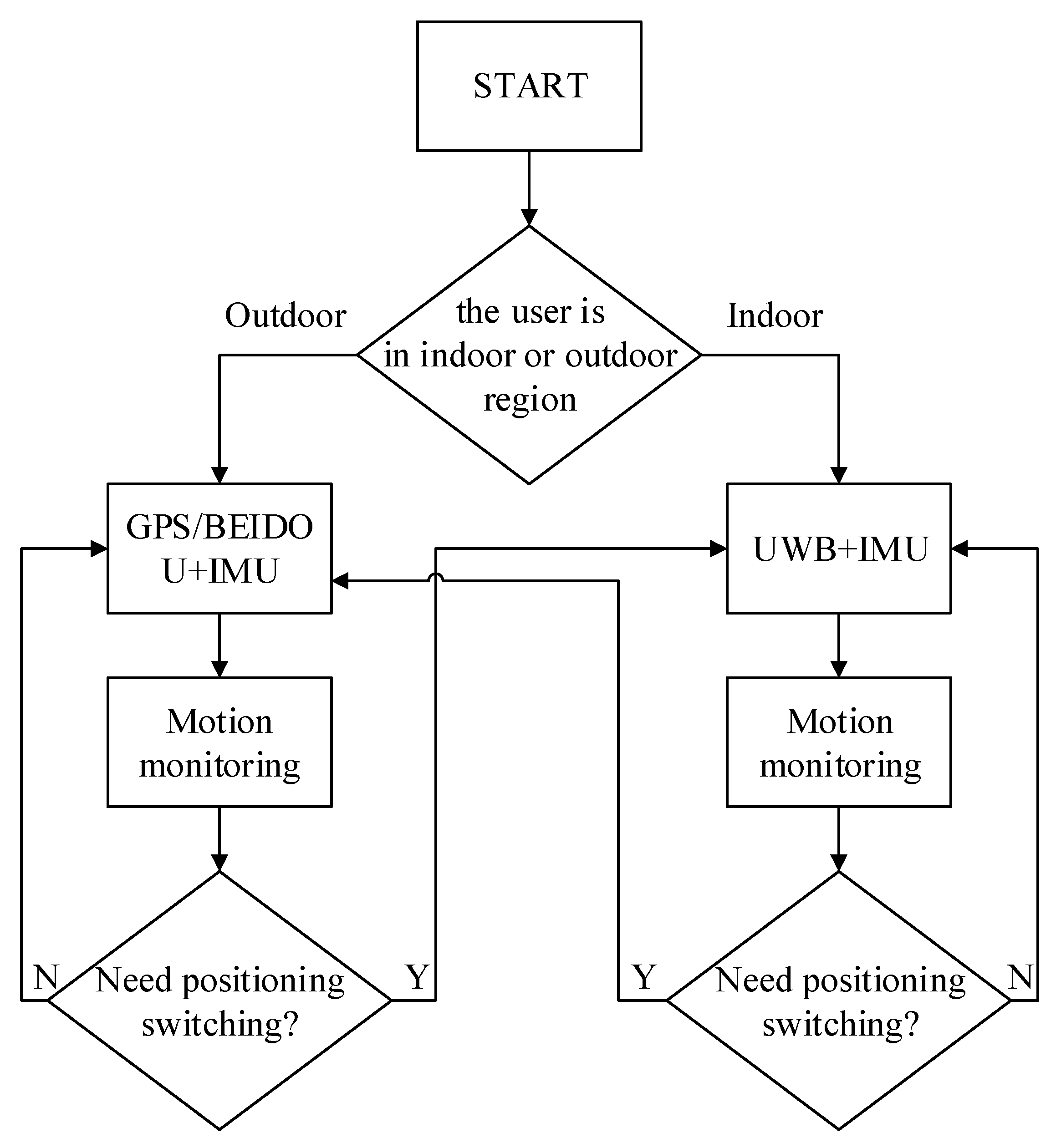
2.4. System Design
3. Results
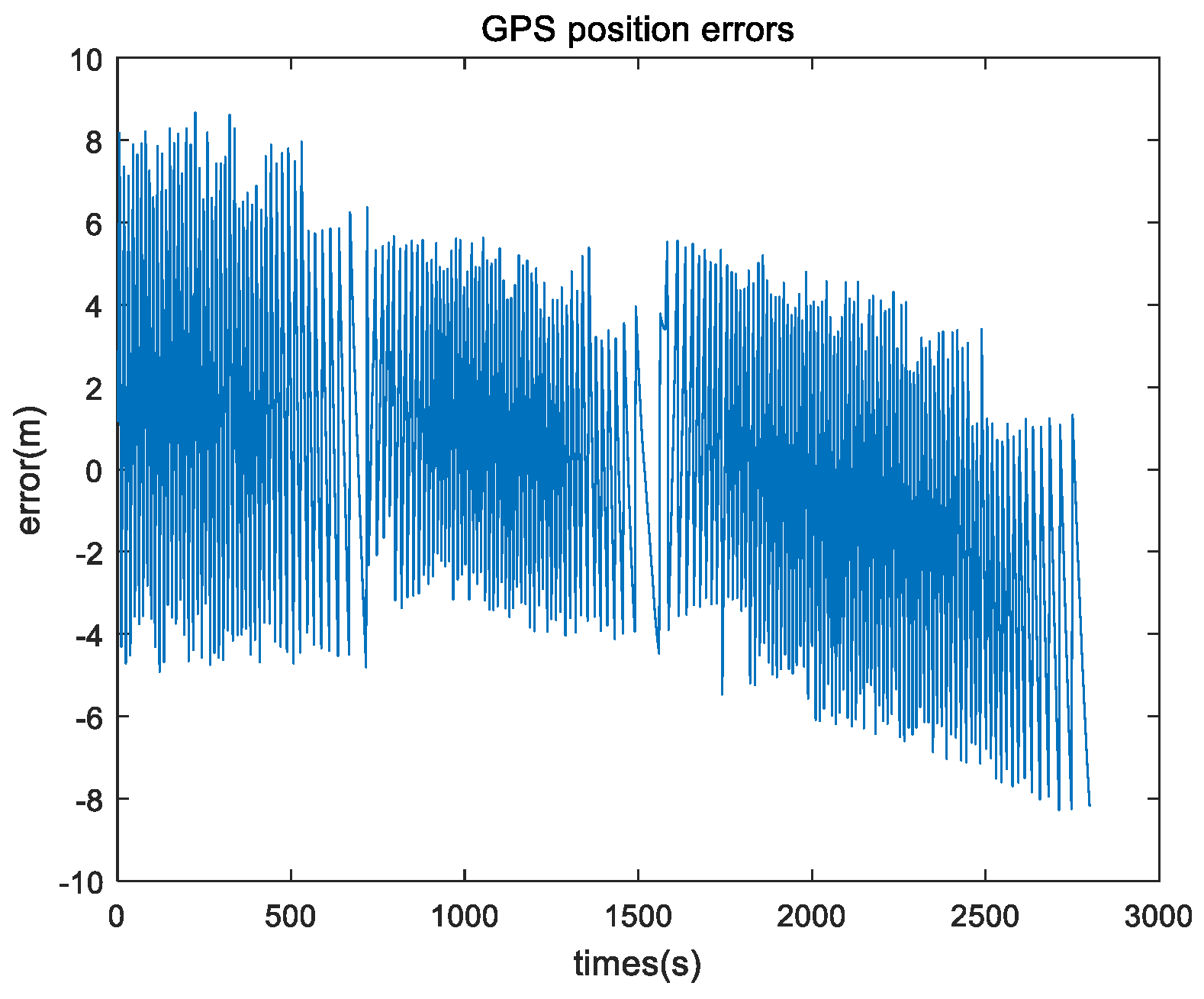
3.1. Outdoor Positioning Results
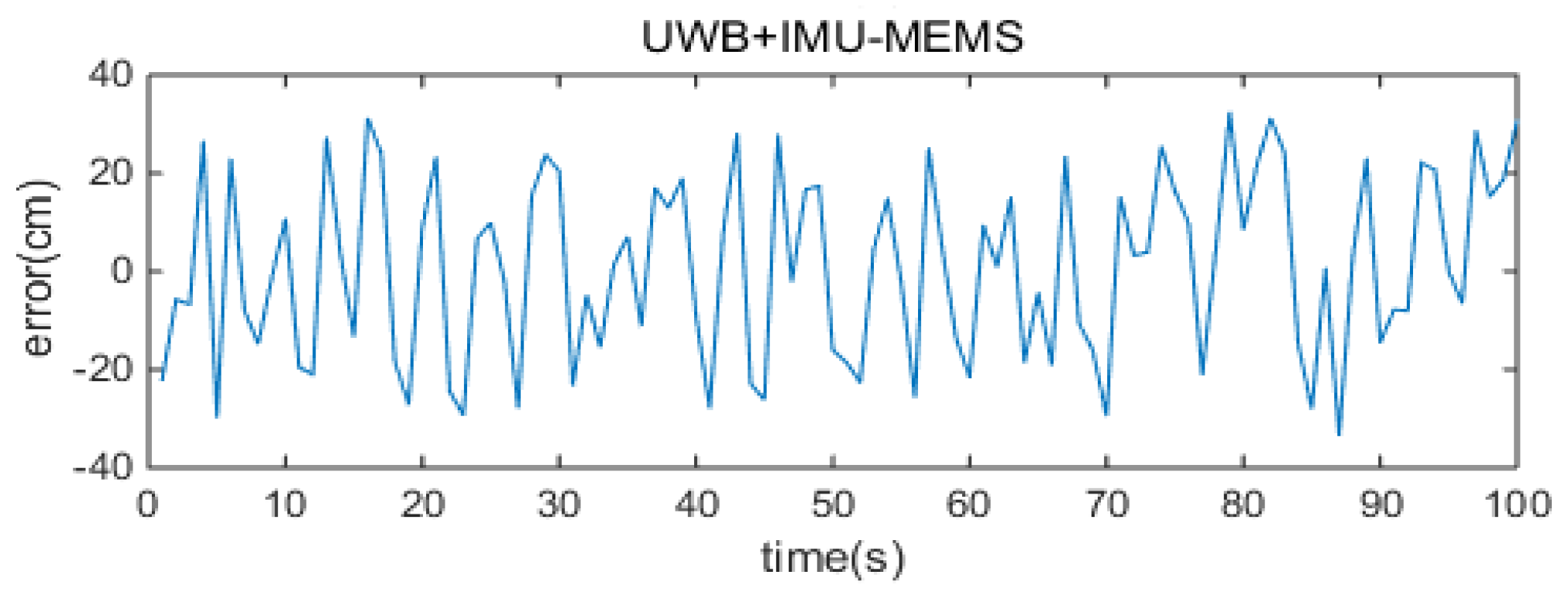
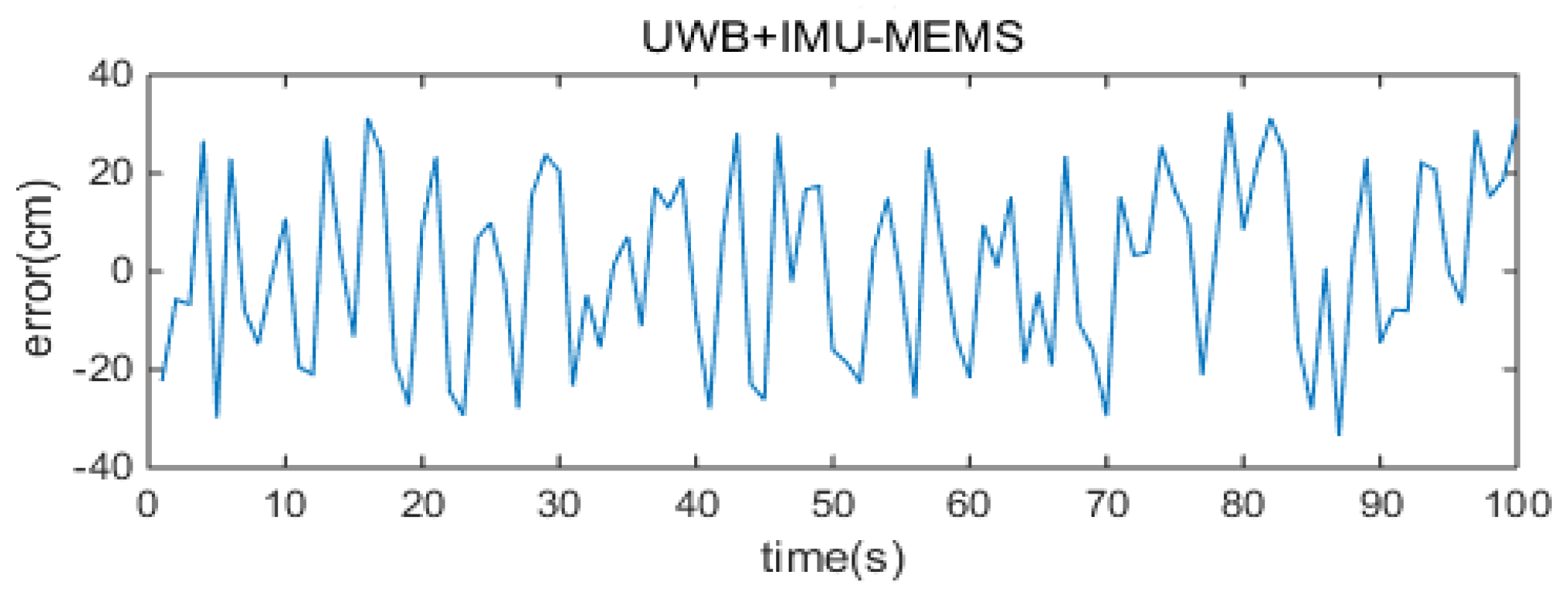
3.2. Indoor Positioning Results
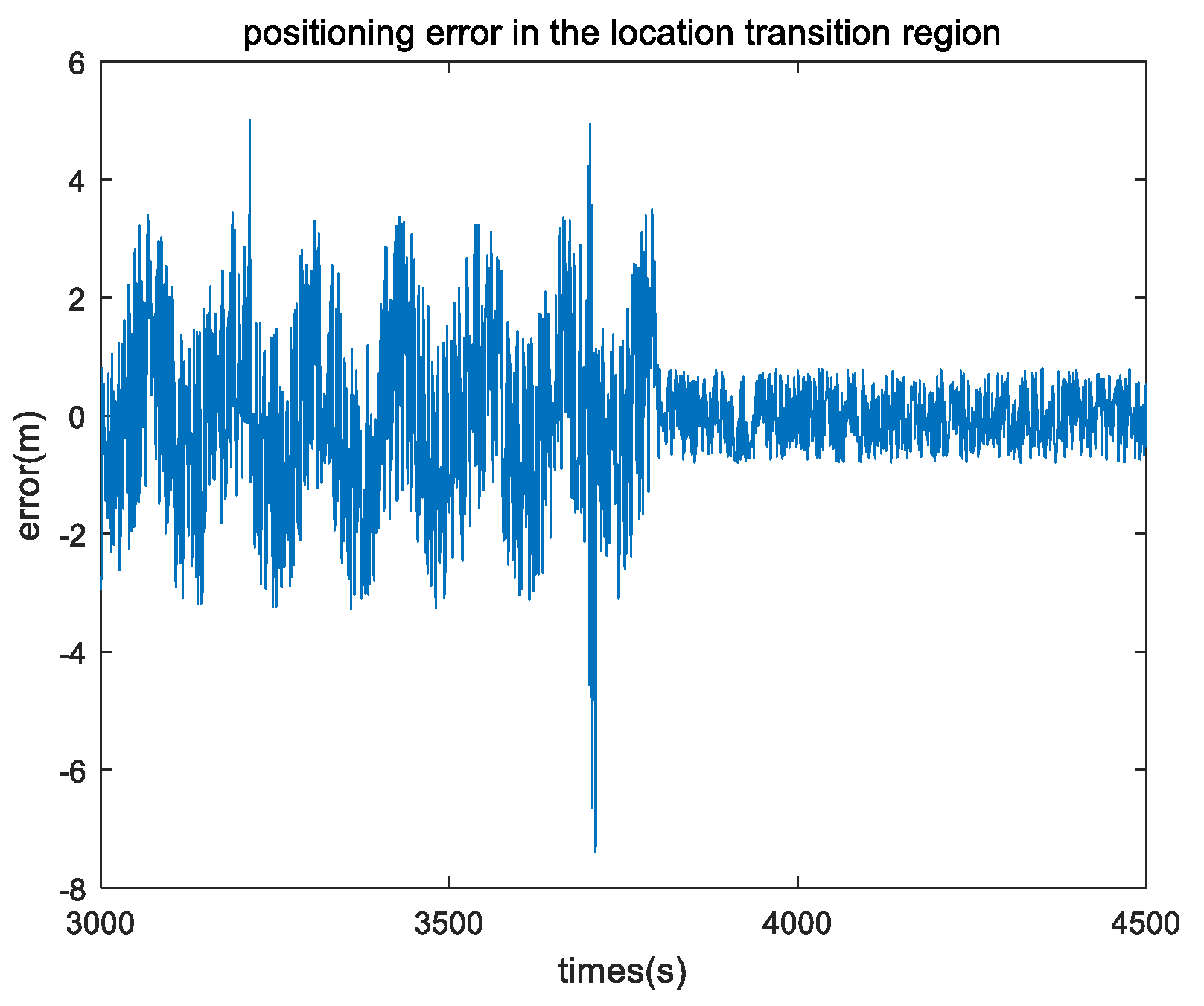
3.3. Positioning Switching Results
4. Conclusions
Acknowledgments
Conflicts of Interest
References
- Waegli, A.; Skaloud, J. Optimization of two GPS/MEMS-IMU integration strategies with application to sports. GPS Solut. 2009, 13, 315–326. [Google Scholar] [CrossRef]
- Hellmers, H.; Norrdine, A.; Blankenbach, J.; Eichhorn, A. An IMU/magnetometer-based Indoor positioning system using Kalman filtering. In Proceedings of the International Conference on Indoor Positioning and Indoor Navigation (IPIN), Montbeliard-Belfort, France, 28–31 October 2013; pp. 1–9. [Google Scholar]
- Ran, L.; Helal, S.; Moore, S. Drishti: An integrated indoor/outdoor blind navigation system and service. In Proceedings of the Second IEEE Annual Conference on Pervasive Computing and Communications, Orlando, FL, USA, 17 March 2004. [Google Scholar]
- Reyero, L.; Delisle, G. A pervasive indoor-outdoor positioning system. J. Netw. 2008, 3, 70–83. [Google Scholar] [CrossRef]
- Hansen, R.; Wind, R.; Jensen, C.S.; Thomsen, B. Seamless indoor/outdoor positioning handover for location—Based services in Streamspin. In Proceedings of the 2009 Tenth International Conference on Mobile Data Management: Systems, Services and Middleware, Taipei, Taiwan, 18–20 May 2009. [Google Scholar]
- Fernandez-Madrigal, J.A.; Cruz-Martin, E.; Gonzalez, J.; Galindo, C.; Blanco, J.L. Application of UWB and GPS technologies for vehicle localization in combined indoor-outdoor environments. In Proceedings of the 9th International Symposium on Signal Processing and Its Applications, Sharjah, United Arab Emiratesm, 12–15 February 2007. [Google Scholar]
- Kealy, A.; Roberts, G.; Retscher, G. Evaluating the performance of low cost MEMS inertial sensors for seamless indoor/outdoor navigation. In Proceedings of the 2010 IEEE/ION Position Location and Navigation Symposium (PLANS), Indian Wells, CA, USA, 4–6 May 2010. [Google Scholar]
- Wang, Y.; Mangnus, J.; Kostic, D.; Nijmeijer, H.; Jansen, S.T.H. Vehicle state estimation using GPS/IMU integration. In Proceedings of the 2011 IEEE Sensors, Limerick, Ireland, 28–31 October 2011; pp. 1815–1818. [Google Scholar]
- Marquez, A.; Tank, B.; Meghani, S.K.; Ahmed, S.; Tepe, K. Accurate UWB and IMU based indoor localization for autonomous robots. In Proceedings of the 2017 IEEE 30th Canadian Conference on Electrical and Computer Engineering, Windsor, ON, Canada, 30 April–3 May 2017; pp. 1–4. [Google Scholar]
- Yoon, P.K.; Zihajehzadeh, S.; Kang, B.; Park, E.J. Robust Biomechanical Model-based 3D Indoor Localization and Tracking Method Using UWB and IMU. IEEE Sens. J. 2017, 17, 1084–1096. [Google Scholar] [CrossRef]







Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, Y.; Chen, Q. Research on Integration of Indoor and Outdoor Positioning in Professional Athletic Training. Proceedings 2018, 2, 295. https://doi.org/10.3390/proceedings2060295
Liu Y, Chen Q. Research on Integration of Indoor and Outdoor Positioning in Professional Athletic Training. Proceedings. 2018; 2(6):295. https://doi.org/10.3390/proceedings2060295
Chicago/Turabian StyleLiu, Yongqing, and Qi Chen. 2018. "Research on Integration of Indoor and Outdoor Positioning in Professional Athletic Training" Proceedings 2, no. 6: 295. https://doi.org/10.3390/proceedings2060295
APA StyleLiu, Y., & Chen, Q. (2018). Research on Integration of Indoor and Outdoor Positioning in Professional Athletic Training. Proceedings, 2(6), 295. https://doi.org/10.3390/proceedings2060295