Development of a Simulation Model for Swimming with Diving Fins †

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
2. Methods
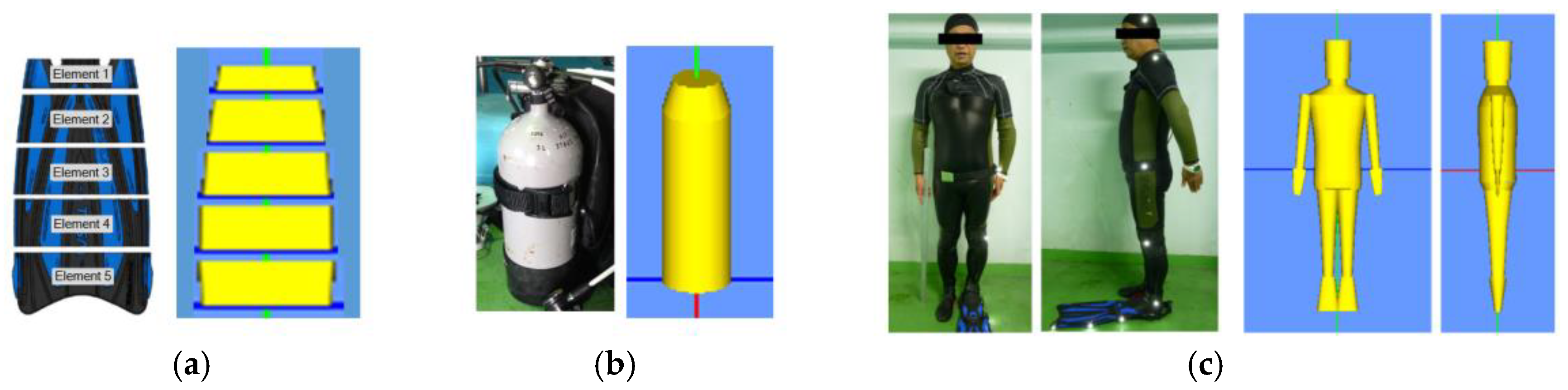
2.1. Construction of the Simulation Model
2.2. Acquistion of input Data for the Model
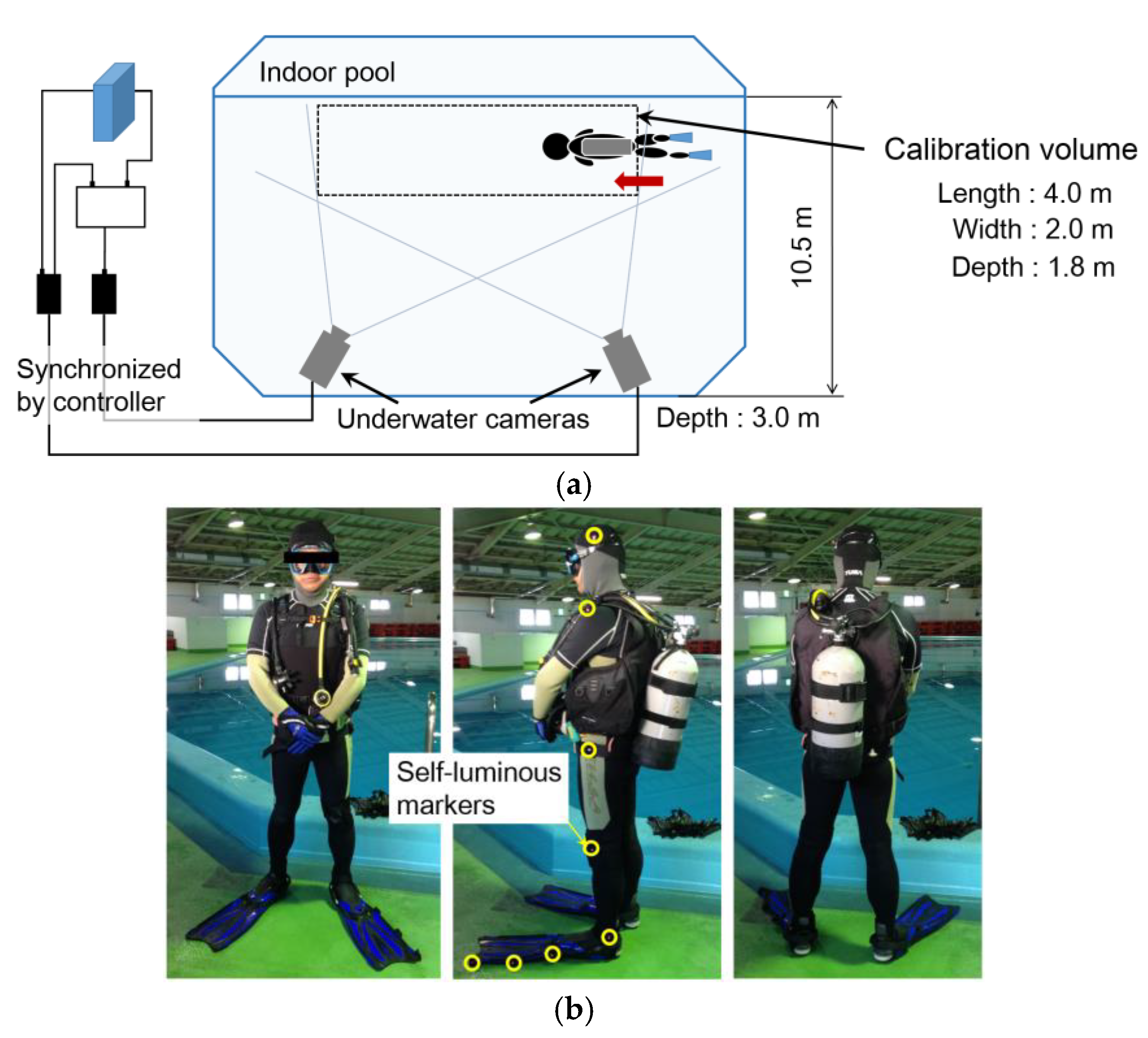
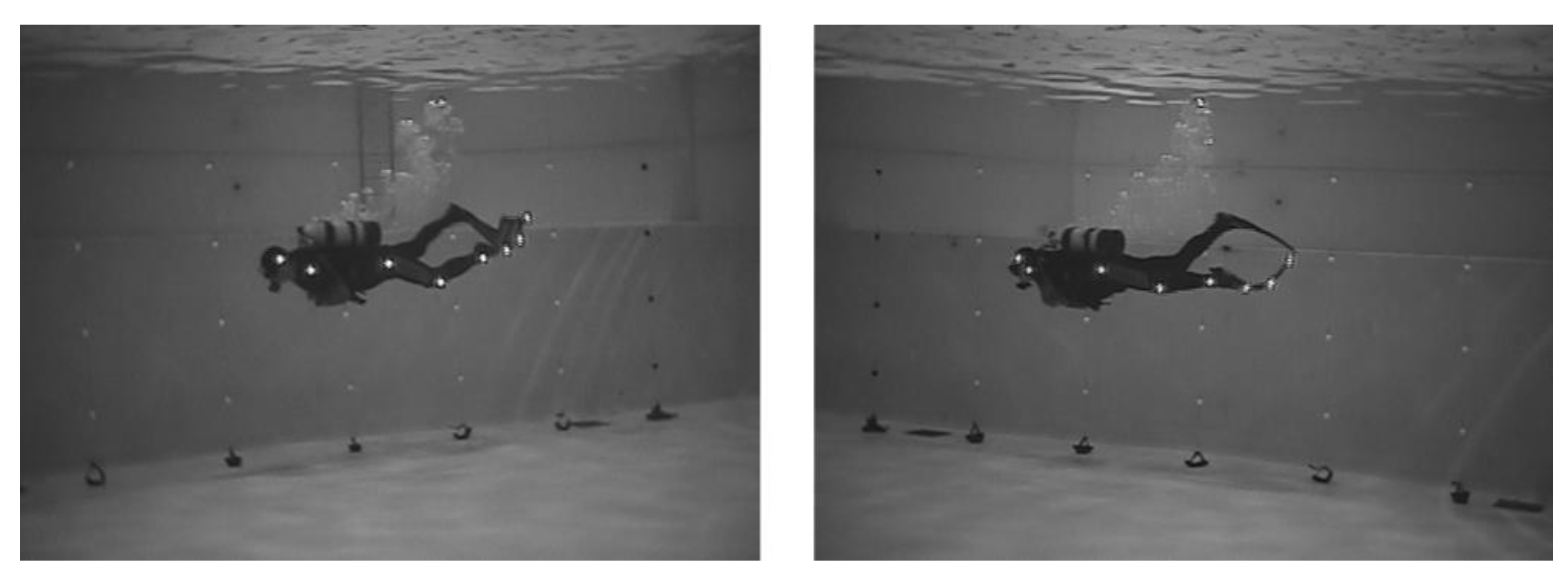
2.2.1. Swimming Motion of the Diver
2.2.2. Bending Property of the Fin
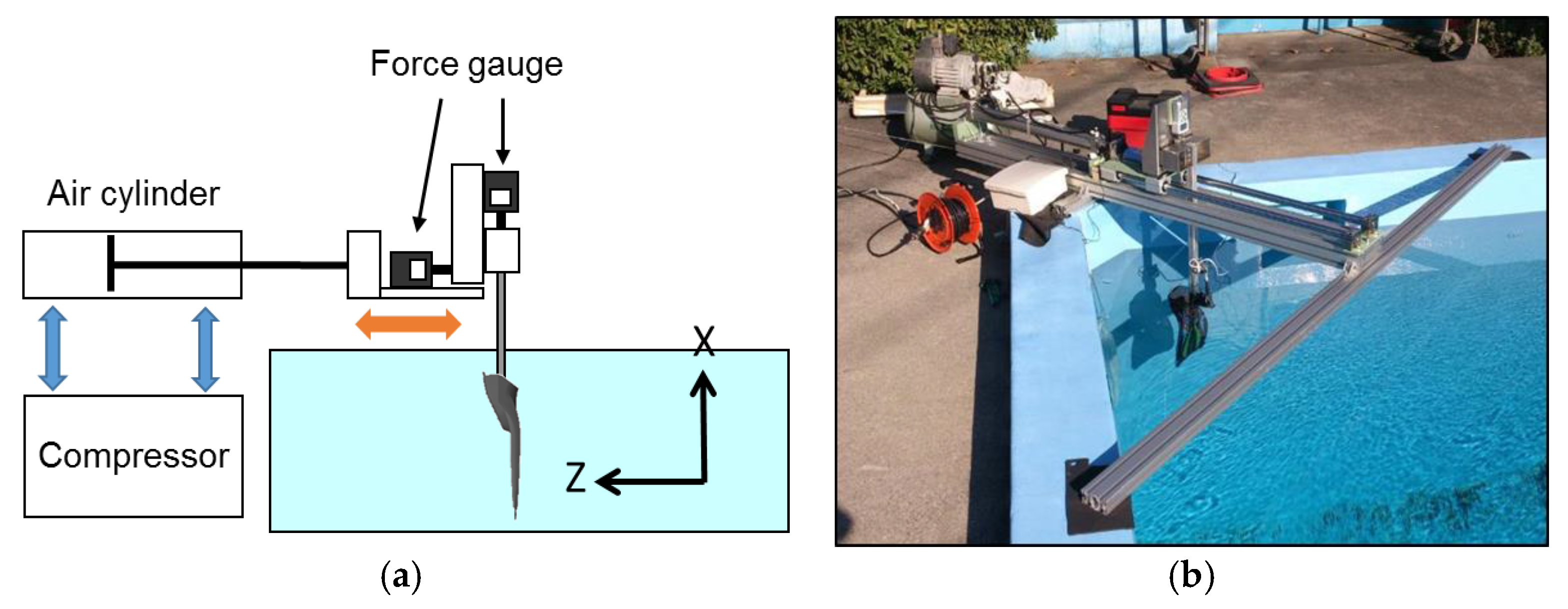
2.2.3. Fluid Force Coefficients of the Fin
2.2.4. Fluid Force Coefficients of the Diver
3. Results and Discussion
4. Conclusions
Conflicts of Interest
References
- Minak, G. Evaluation of the performance of free-diving fins. Sports Eng. 2004, 7, 153–158. [Google Scholar] [CrossRef]
- Nakashima, M.; Suzuki, S.; Nakajima, K. Development of a simulation model for monofin swimming. J. Biomech. Sci. Eng. 2010, 5, 408–420. [Google Scholar] [CrossRef]
- Nakashima, M.; Satou, K.; Miura, Y. Development of swimming human simulation model considering rigid body dynamics and unsteady fluid force for whole body. J. Fluid Sci. Technol. 2007, 2, 56–67. [Google Scholar] [CrossRef]
- Zamparo, P.; Pendergast, D.R.; Termin, B.; Minetti, A.E. How fins affect the economy and efficiency of human swimming. J. Exp. Biol. 2002, 205, 2665–2676. [Google Scholar] [CrossRef] [PubMed]
- Nakashima, M. Mechanical study of standard six beat front crawl swimming by using swimming human simulation model. J. Fluid Sci. Technol. 2007, 2, 290–301. [Google Scholar] [CrossRef]
- Nakashima, M. Simulation analysis of the effect of trunk undulation on swimming performance in underwater dolphin kick of human. J. Biomech. Sci. Eng. 2009, 4, 94–104. [Google Scholar] [CrossRef]
- Kiuchi, H.; Nakashima, M.; Cheng, K.B.; Hubbard, M. Modeling fluid forces in the dive start of competitive swimming. J. Biomech. Sci. Eng. 2010, 5, 314–328. [Google Scholar] [CrossRef][Green Version]
- Nakashima, M.; Kiuchi, H.; Nakajima, K. Multi agent/object simulation in human swimming. J. Biomech. Sci. Eng. 2010, 5, 380–387. [Google Scholar] [CrossRef][Green Version]
- Nakashima, M. Modeling and simulation of human swimming. J. Aero Aqua Bio-Mech. 2010, 1, 11–17. [Google Scholar] [CrossRef][Green Version]
- Nakashima, M.; Suzuki, S.; Ono, A.; Nakamura, T. Development of the transfemoral prosthesis for swimming focused on ankle joint motion. J. Biomech. Sci. Eng. 2013, 8, 79–93. [Google Scholar] [CrossRef]









Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Nakashima, M.; Tanno, Y.; Fujimoto, T.; Masutani, Y. Development of a Simulation Model for Swimming with Diving Fins. Proceedings 2018, 2, 288. https://doi.org/10.3390/proceedings2060288
Nakashima M, Tanno Y, Fujimoto T, Masutani Y. Development of a Simulation Model for Swimming with Diving Fins. Proceedings. 2018; 2(6):288. https://doi.org/10.3390/proceedings2060288
Chicago/Turabian StyleNakashima, Motomu, Yosuke Tanno, Takashi Fujimoto, and Yutaka Masutani. 2018. "Development of a Simulation Model for Swimming with Diving Fins" Proceedings 2, no. 6: 288. https://doi.org/10.3390/proceedings2060288
APA StyleNakashima, M., Tanno, Y., Fujimoto, T., & Masutani, Y. (2018). Development of a Simulation Model for Swimming with Diving Fins. Proceedings, 2(6), 288. https://doi.org/10.3390/proceedings2060288