Comparison of Active Drag Using the MRT-Method and the MAD-System in Front Crawl Swimming †


Abstract
:1. Introduction
2. Methods
2.1. Participants
2.2. Experimental Design
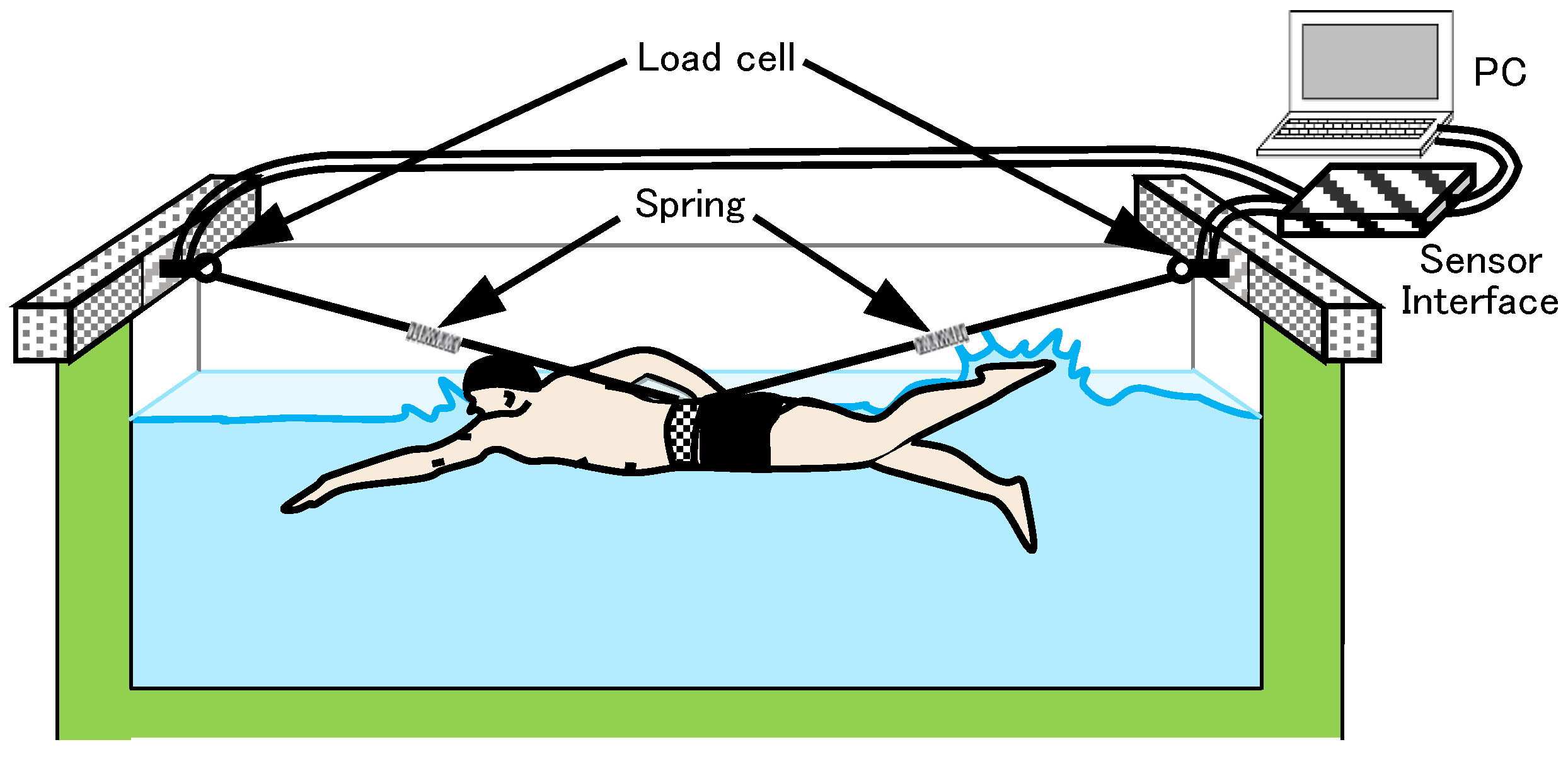
2.2.1. MRT-Method
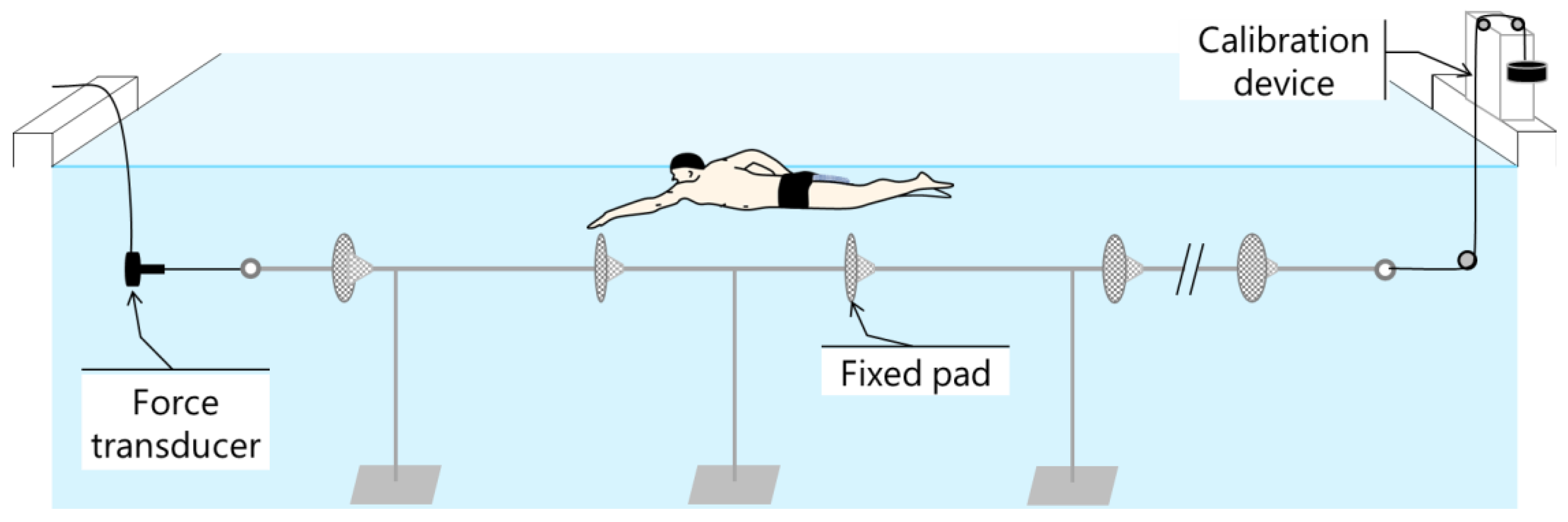
2.2.2. MAD-System
2.3. Data Analysis
2.4. Statistical Analysis
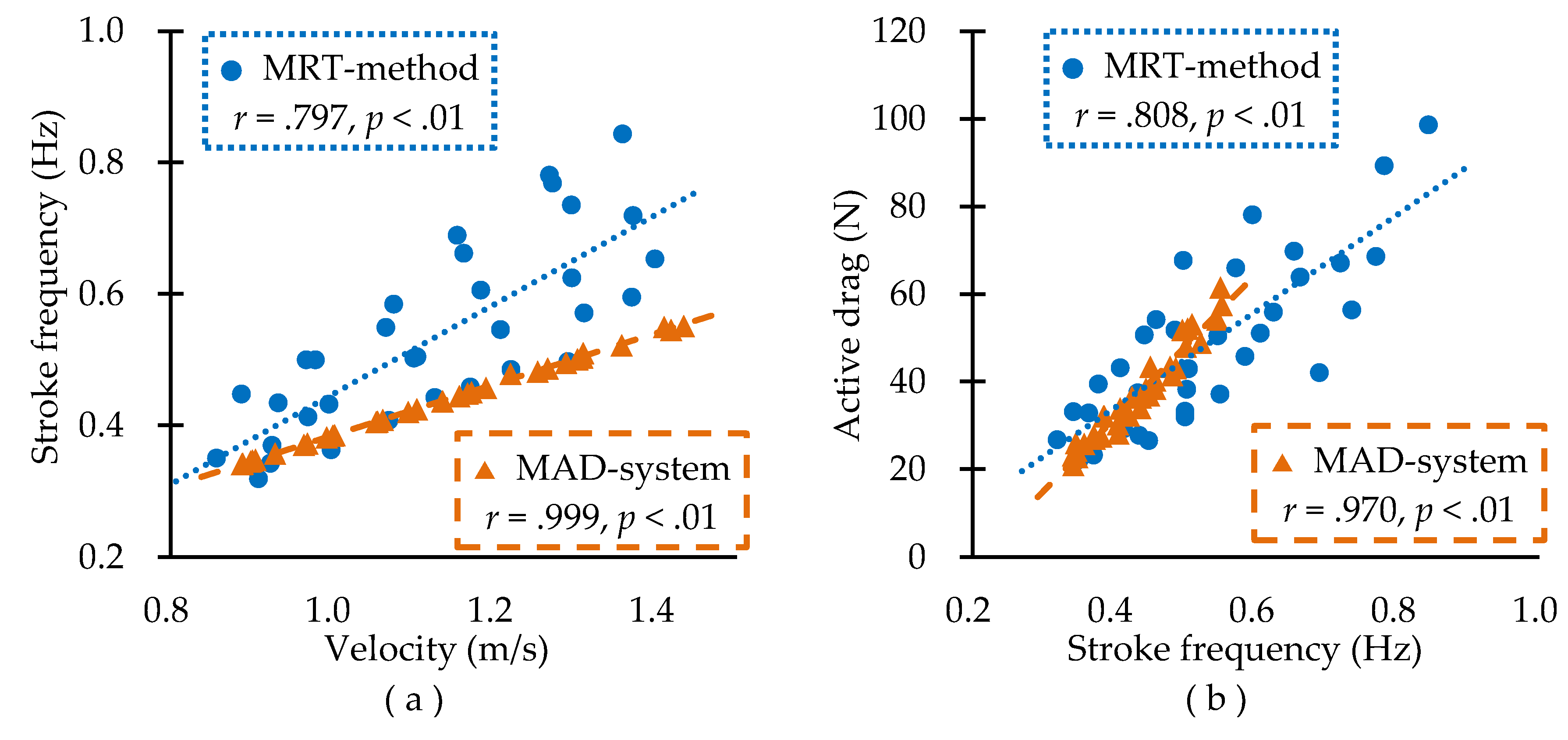
3. Results
4. Discussion
5. Conclusions
Acknowledgments
Conflicts of Interest
References
- Hollander, A.P.; De Groot, G.; van Ingen Schenau, G.; Toussaint, H.M.; De Best, H.; Peeters, W.; Meulemans, A.; Schreurs, A.W. Measurement of active drag during crawl arm stroke swimming. J. Sports Sci. 1986, 4, 21–30. [Google Scholar] [CrossRef] [PubMed]
- Craig, A.B.; Skehan, P.L.; Pawelczyk, J.A.; Boomer, W.L. Velocity, stroke rate, and distance per stroke during elite swimming competition. Med. Sci. Sports Exerc. 1985, 17, 625–634. [Google Scholar] [CrossRef] [PubMed]
- Seifert, L.; Toussaint, H.M.; Alberty, M.; Schnitzler, C.; Chollet, D. Arm coordination, power, and swim efficiency in national and regional front crawl swimmers. Hum. Mov. Sci. 2010, 29, 426–439. [Google Scholar] [CrossRef] [PubMed]
- Kolmogorov, S.; Duplishcheva, O. Active drag, useful mechanical power output and hydrodynamic force coefficient in different swimming strokes at maximal velocity. J. Biomech. 1992, 25, 311–318. [Google Scholar] [CrossRef]
- Formosa, D.P.; Mason, B.; Burkett, B. The force–time profile of elite front crawl swimmers. J. Sports Sci. 2011, 29, 811–819. [Google Scholar] [CrossRef] [PubMed]
- Narita, K.; Nakashima, M.; Takagi, H. Developing a methodology for estimating the drag in front-crawl swimming at various velocities. J. Biomech. 2017, 54, 123–128. [Google Scholar] [CrossRef] [PubMed]
- Toussaint, H.M. Differences in propelling efficiency between competitive and triathlon swimmers. Med. Sci. Sports Exerc. 1990, 22, 409–415. [Google Scholar] [CrossRef] [PubMed]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Swimmer | MRT-Method | MAD-System | ||
|---|---|---|---|---|
| k | n | k | n | |
| A | 37.8 | 3.28 | 30.5 | 1.73 |
| B | 34.1 | 2.30 | 28.2 | 1.85 |
| C | 32.2 | 2.34 | 27.1 | 2.06 |
| D | 38.9 | 2.16 | 29.6 | 2.10 |
| E | 33.0 | 2.83 | 31.3 | 1.85 |
| F | 31.1 | 2.23 | 27.6 | 1.84 |
| Mean | 34.5 | 2.53 | 29.1 | 1.90 |
| SD | 2.9 | 0.40 | 1.5 | 0.13 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Narita, K.; Ogita, F.; Nakashima, M.; Takagi, H. Comparison of Active Drag Using the MRT-Method and the MAD-System in Front Crawl Swimming. Proceedings 2018, 2, 287. https://doi.org/10.3390/proceedings2060287
Narita K, Ogita F, Nakashima M, Takagi H. Comparison of Active Drag Using the MRT-Method and the MAD-System in Front Crawl Swimming. Proceedings. 2018; 2(6):287. https://doi.org/10.3390/proceedings2060287
Chicago/Turabian StyleNarita, Kenzo, Futoshi Ogita, Motomu Nakashima, and Hideki Takagi. 2018. "Comparison of Active Drag Using the MRT-Method and the MAD-System in Front Crawl Swimming" Proceedings 2, no. 6: 287. https://doi.org/10.3390/proceedings2060287
APA StyleNarita, K., Ogita, F., Nakashima, M., & Takagi, H. (2018). Comparison of Active Drag Using the MRT-Method and the MAD-System in Front Crawl Swimming. Proceedings, 2(6), 287. https://doi.org/10.3390/proceedings2060287