Accuracy of Centre of Pressure Gait Measurements from Two Pressure-Sensitive Insoles †



Abstract
:1. Introduction
2. Methodology
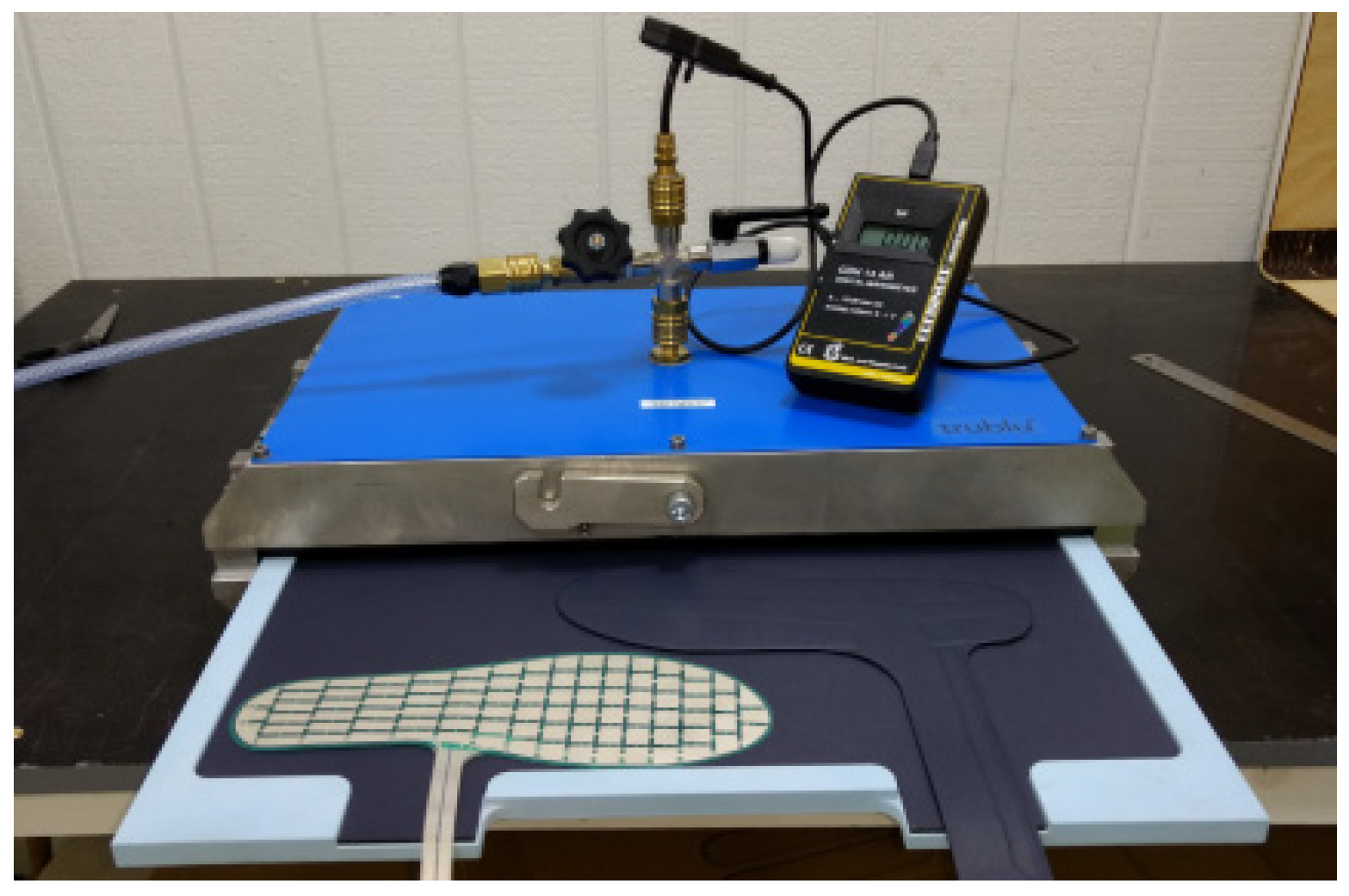
2.1. Experimental Set-Up
2.2. COP Data Analysis
3. Results
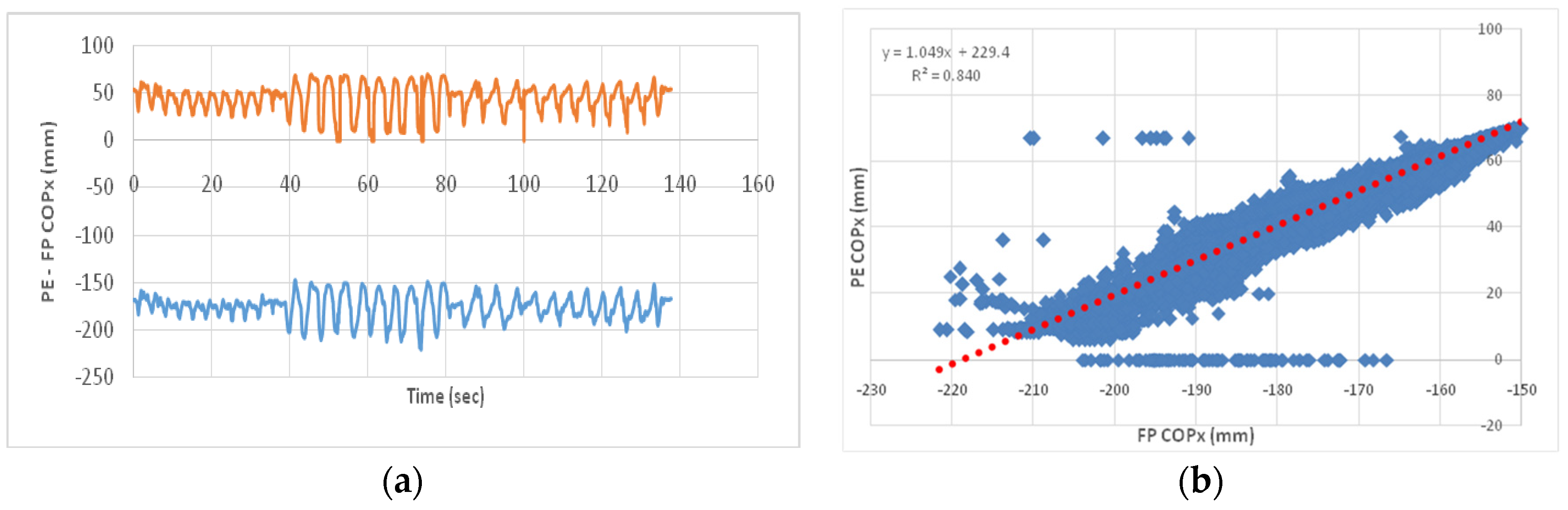
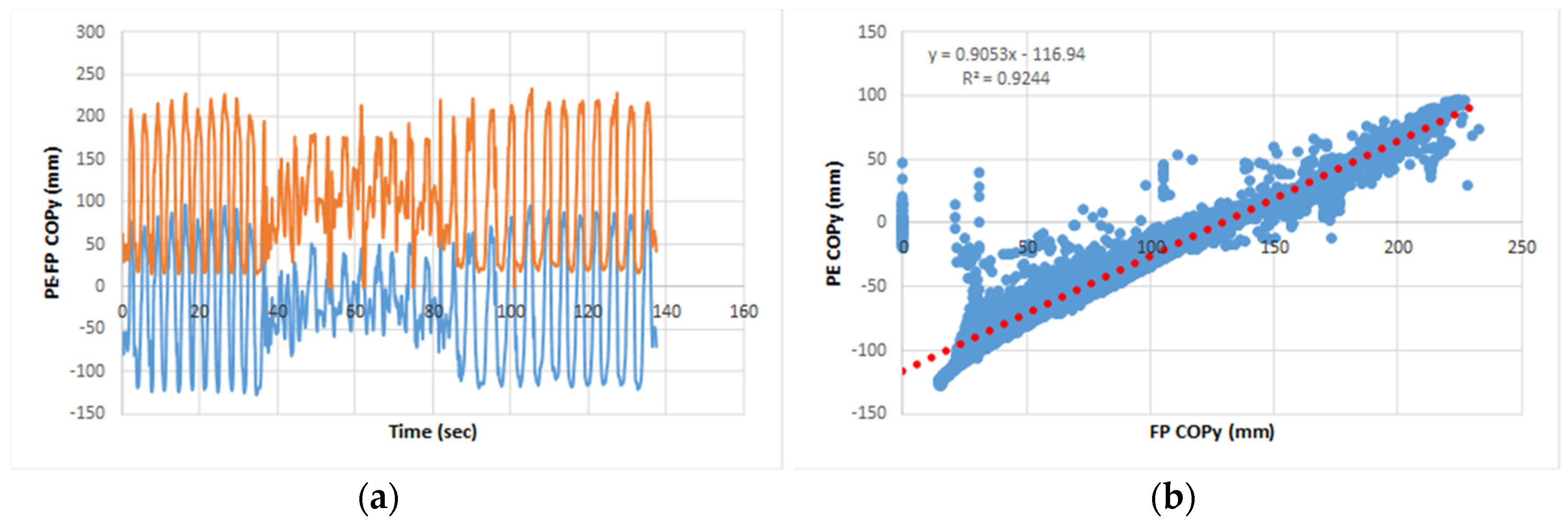
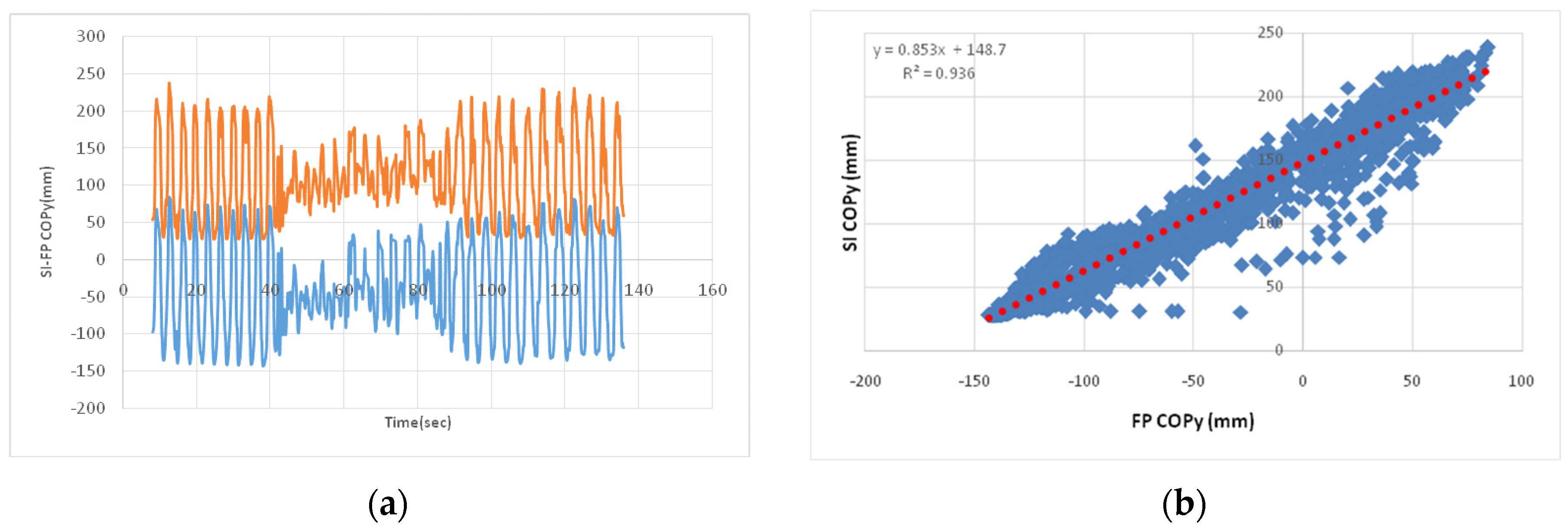
3.1. Pedar Insole Data—COPx and COPy
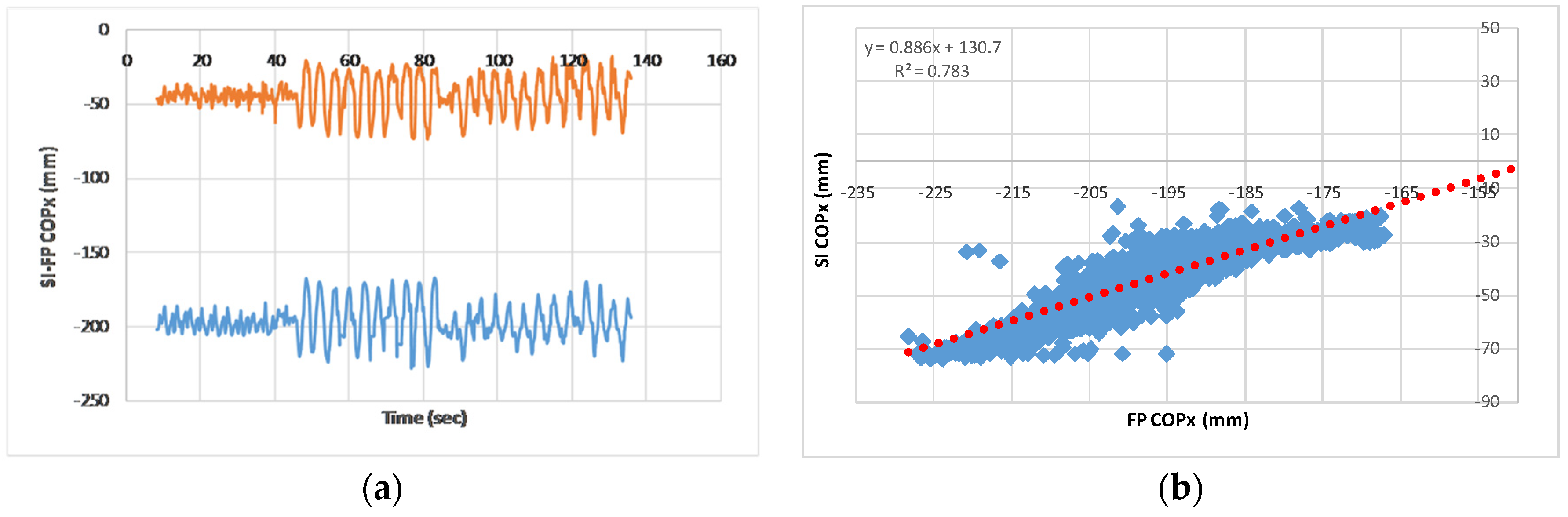
3.2. Smart Insole Data—COPx and COPy
4. Discussion and Conclusions
Acknowledgments
Conflicts of Interest
References
- Hlson, S.L.; Peake, J.M.; Sullivan, J.P. Wearable technology for athletes: information overload and pseudoscience? Int. J. Sports Physiol. Perform. 2016, 11, 705–706. [Google Scholar] [CrossRef] [PubMed]
- Düking, P.; Hotho, A.; Holmberg, H.C.; Fuss, F.K.; Sperlich, B. Comparison of non-invasive individual monitoring of the training and health of athletes with commercially available wearable technologies. Front. Physiol. 2016, 7, 71. [Google Scholar] [CrossRef] [PubMed]
- Mohamed, O.; Cerny, K.; Jones, W.; Burnfield, J.M. The effect of terrain on foot pressures during walking. Foot Ankle Int. 2005, 26, 859–869. [Google Scholar] [CrossRef] [PubMed]
- Han, T.R.; Paik, N.J.; Im, M.S. Quantification of the path of center of pressure (COP) using an F-scan in-shoe transducer. Gait Posture 1999, 10, 248–254. [Google Scholar] [CrossRef]
- Hurkmans, H.L.P.; Bussmann, J.B.J.; Benda, E.; Verhaar, J.A.N.; Stam, H.J. Accuracy and repeatability of the Pedar Mobile system in long-term vertical force measurements. Gait Posture 2006, 23, 118–125. [Google Scholar] [CrossRef] [PubMed]
- Ramanathan, A.K.; Kiran, P.; Arnold, G.P.; Wang, W.; Abboud, R.J. Repeatability of the Pedar-X® in-shoe pressure measuring system. Foot Ankle Surg. 2010, 16, 70–73. [Google Scholar] [CrossRef] [PubMed]
- Winter, D.A. Human balance and posture control during standing and walking. Gait Posture 1995, 3, 193–214. [Google Scholar] [CrossRef]
- Takala, E.P.; Korhonen, I.; Viikari-Juntura, E. Postural sway and stepping response among working population: reproducibility, long-term stability, and associations with symptoms of the low back. Clin. Biomech. 1997, 12, 429–437. [Google Scholar] [CrossRef]
- Melzer, I.; Benjuya, N.; Kaplanski, J. Postural stability in the elderly: a comparison between fallers and non-fallers. Age Ageing 2004, 33, 602–607. [Google Scholar] [CrossRef] [PubMed]
- Tan, A.M.; Fuss, F.K.; Weizman, Y.; Woudstra, Y.; Troynikov, O. Design of low cost smart insole for real time measurement of plantar pressure. Procedia Technol. 2015, 20, 117–122. [Google Scholar] [CrossRef]
- Tan, A.M.; Fuss, F.K.; Weizman, Y.; Troynikov, O. Development of a smart insole for medical and sports purposes. Procedia Eng. 2015, 112, 152–156. [Google Scholar] [CrossRef]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Participants | COP | p-Value | SI vs. FP | PE vs. FP | ||
|---|---|---|---|---|---|---|
| R2 | k | R2 | k | |||
| 1 | COPx | 0.0989 | 0.7046 | 0.6655 | 0.6825 | 0.7458 |
| COPy | 0 | 0.9077 | 0.8455 | 0.9401 | 1.08 | |
| 2 | COPx | 0 | 0.7837 | 0.8867 | 0.8409 | 1.0492 |
| COPy | 0.0001 | 0.9368 | 0.8538 | 0.9244 | 0.9053 | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Weizman, Y.; Tan, A.M.; Fuss, F.K. Accuracy of Centre of Pressure Gait Measurements from Two Pressure-Sensitive Insoles. Proceedings 2018, 2, 277. https://doi.org/10.3390/proceedings2060277
Weizman Y, Tan AM, Fuss FK. Accuracy of Centre of Pressure Gait Measurements from Two Pressure-Sensitive Insoles. Proceedings. 2018; 2(6):277. https://doi.org/10.3390/proceedings2060277
Chicago/Turabian StyleWeizman, Yehuda, Adin Ming Tan, and Franz Konstantin Fuss. 2018. "Accuracy of Centre of Pressure Gait Measurements from Two Pressure-Sensitive Insoles" Proceedings 2, no. 6: 277. https://doi.org/10.3390/proceedings2060277
APA StyleWeizman, Y., Tan, A. M., & Fuss, F. K. (2018). Accuracy of Centre of Pressure Gait Measurements from Two Pressure-Sensitive Insoles. Proceedings, 2(6), 277. https://doi.org/10.3390/proceedings2060277