Miniaturized Plasma Actuator Flow Measurements by MEMS-Based Thermal Conductivity Sensors †

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Material and Methods
2.1. Sensor Chip
2.2. Miniaturized Plasma Actuator
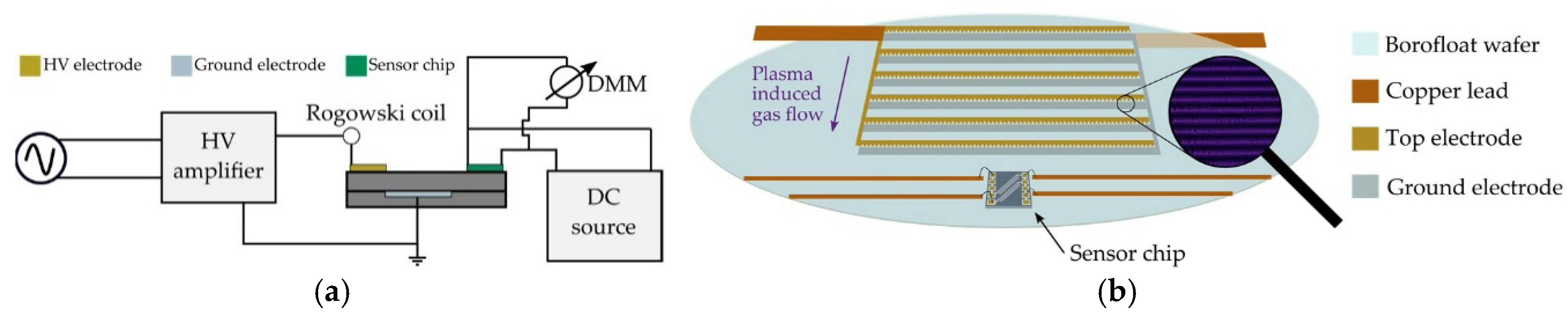
2.3. Measurement Setup
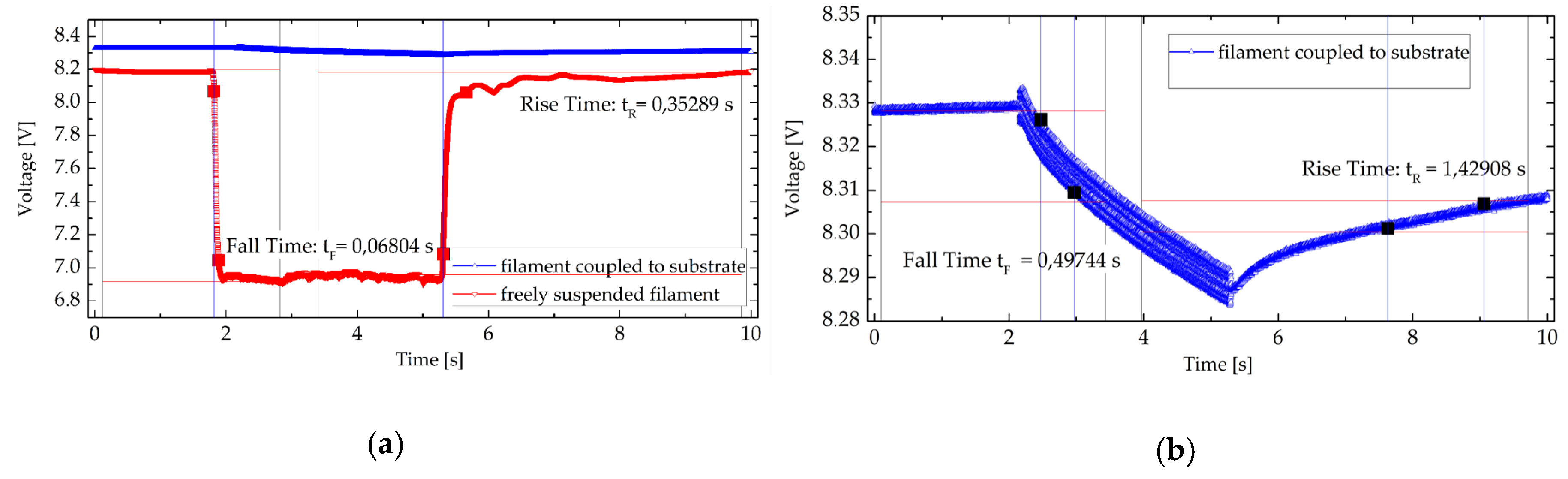
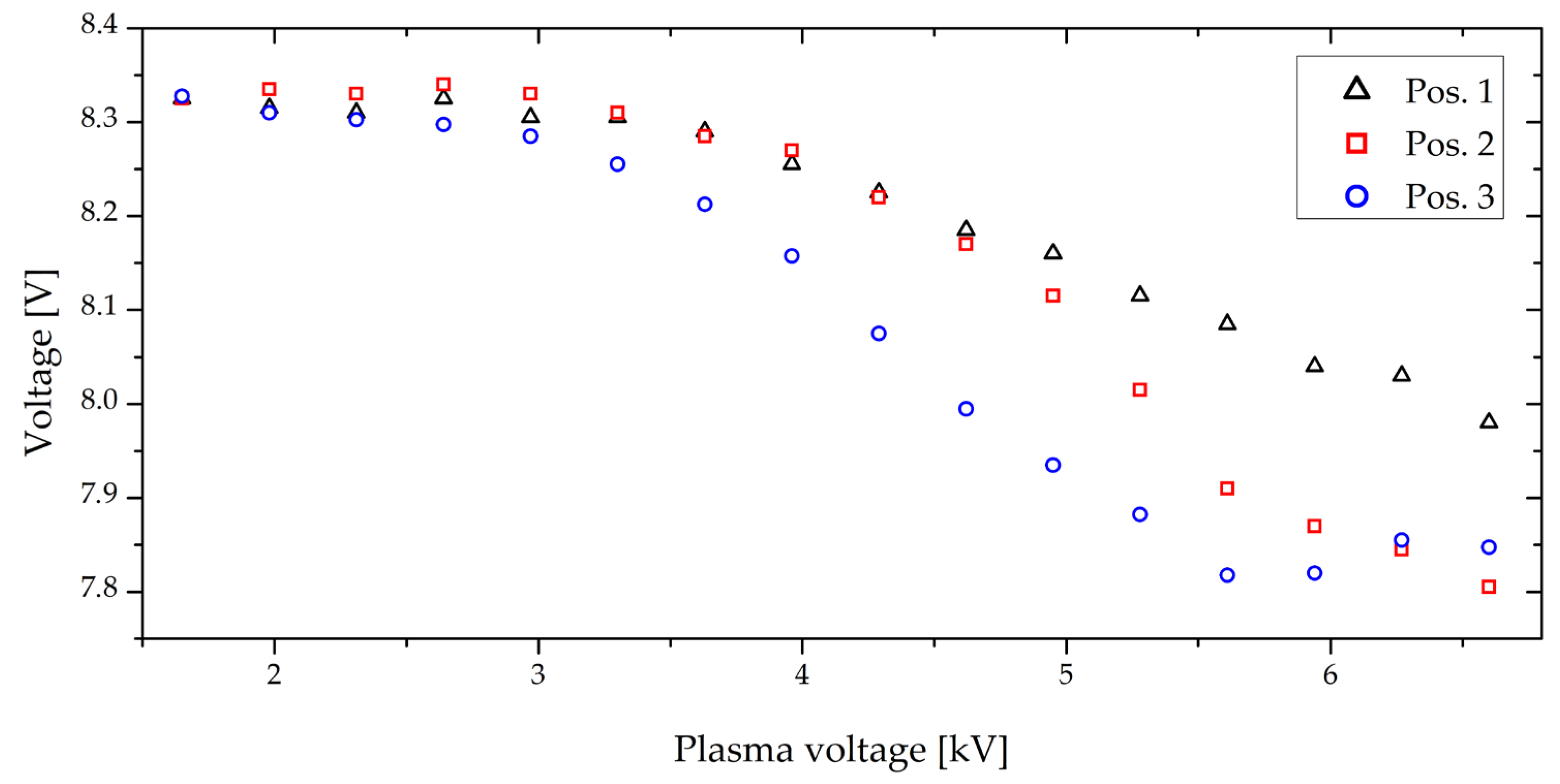
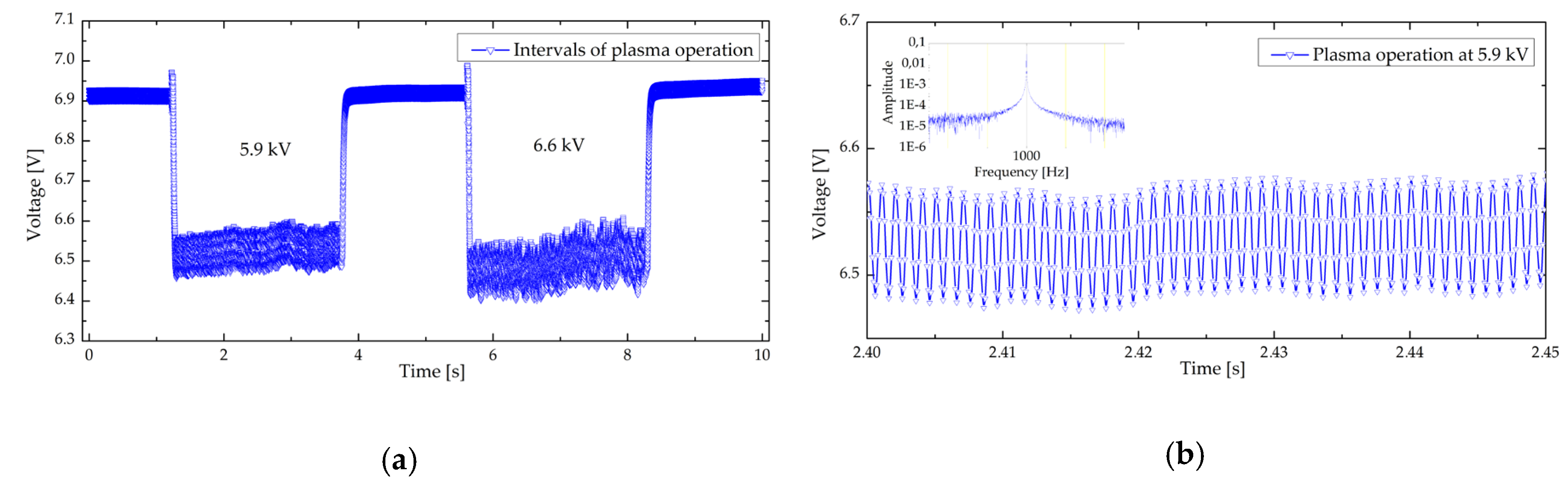
3. Results
4. Discussion and Outlook
Author Contributions
Acknowledgments
Conflicts of Interest
References
- Maden, I.; Maduta, R. Experimental and computational study of the flow induced by a plasma actuator. Int. J. Heat Fluid Flow 2013, 41, 80–89. [Google Scholar] [CrossRef]
- Wang, L.; Wong, C.W.; Lu, Z.; Wu, Z.; Zhou, Y. Novel Sawtooth Dielectric Barrier Discharge Plasma Actuator for Flow Separation Control. AIAA J. 2017, 554, 1405–1416. [Google Scholar] [CrossRef]
- Simon, B.; Markus, D.; Tropea, C. Cancellation of Tollmien-Schlichting Waves in Direct Vicinity of a Plasma Actuator. AIAA J. 2018, 1–10. [Google Scholar] [CrossRef]
- Dams, F.; Schreiner, R. Influencing factor of the sensitivity of MEMS-based thermal conductivity vacuum gauges. J. Vac. Sci. Technol. A 2014, 32, 031603. [Google Scholar] [CrossRef]

Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Berndt, D.; Lindner, M.; Tschurtschenthaler, K.; Langer, C.; Schreiner, R. Miniaturized Plasma Actuator Flow Measurements by MEMS-Based Thermal Conductivity Sensors. Proceedings 2018, 2, 939. https://doi.org/10.3390/proceedings2130939
Berndt D, Lindner M, Tschurtschenthaler K, Langer C, Schreiner R. Miniaturized Plasma Actuator Flow Measurements by MEMS-Based Thermal Conductivity Sensors. Proceedings. 2018; 2(13):939. https://doi.org/10.3390/proceedings2130939
Chicago/Turabian StyleBerndt, Dominik, Matthias Lindner, Karl Tschurtschenthaler, Christoph Langer, and Rupert Schreiner. 2018. "Miniaturized Plasma Actuator Flow Measurements by MEMS-Based Thermal Conductivity Sensors" Proceedings 2, no. 13: 939. https://doi.org/10.3390/proceedings2130939
APA StyleBerndt, D., Lindner, M., Tschurtschenthaler, K., Langer, C., & Schreiner, R. (2018). Miniaturized Plasma Actuator Flow Measurements by MEMS-Based Thermal Conductivity Sensors. Proceedings, 2(13), 939. https://doi.org/10.3390/proceedings2130939