Gas-Flow Sensor Based on Self-Oscillating and Self-Sensing Cantilever †

{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Experimental Setup and Behavior Description
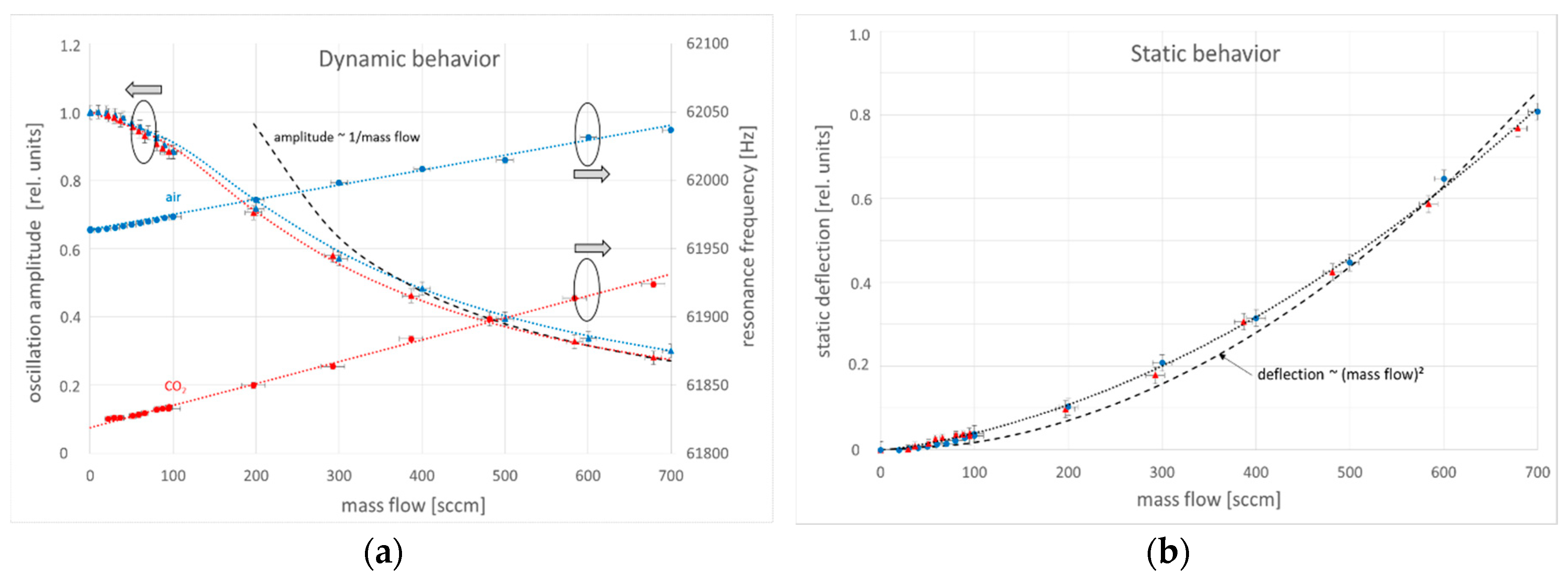
3. Results
- The static deflection increases quadratically with the flow velocity according to equation (5). In the lower flow range, the measurement is inaccurate due to the very small responds and the noise of the static measurement.
- The resonance amplitude drops with 1/v. It has a high sensitivity in the flow range of 1–10 m/s. In this range it decreases by 50%.
- The resonance frequency increases linearly with the flow velocity. The change is small: . The size of the resonance frequency and its change as a function of the gas-flow is gas type dependent.
Author Contributions
Funding
Conflicts of Interest
References
- Zhang, S.; Lou, L.; Park, W.-T.; Lee, C. Characterization of a silicon nanowire-based cantilever air-flow sensor. J. Micromech. Microeng. 2012, 22, 095008. [Google Scholar] [CrossRef]
- Ju, P.-Y.; Tsai, C.-H.; Fu, L.-M.; Lin, C.-H. Microfluidic flow meter and Viscometer utilizing flow-induced Vibration on an optic fiber cantilever. Transducers 2011, 11, 1428–1431. [Google Scholar]
- Rangelow, I.W.; Ivanov, Tz.; Ahmad, A.; Kästner, M.; Lenk, C.; Bozchalooi, I.S.; Xia, F.; Youcef-Toumi, K.; Holz, M.; Reum, A. Active scanning probes: A versatile toolkit for fast imaging and emerging nanofabrication. J. Vacuum Sci. Technol. B 2017, 35, 06G101. [Google Scholar] [CrossRef]
- Hosaka, H.; Itao, K.; Kuroda, S. Damping characteristics of beam-shaped micro-oscillators. Sens. Actuators A Phys. 1995, 49, 87–95. [Google Scholar] [CrossRef]
- Sader, J.E. Method for the calibration of atomic force microscope cantilevers. J. Appl. Phys. 1998, 84, 64–76. [Google Scholar] [CrossRef]
- Maali, A.; Hurth, C.; Boisgard, R.; Jai, C.; Cohen-Bouhacina, T.; Aime, J.-P. Hydrodynamics of oscillating atomic force microscopy cantilevers in viscous fluids. J. Appl. Phys. 2005, 97, 074907. [Google Scholar] [CrossRef]

Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zöllner, J.-P.; Durstewitz, S.; Stauffenberg, J.; Ivanov, T.; Holz, M.; Ehrhardt, W.; Riegel, W.-U.; Rangelow, I.W. Gas-Flow Sensor Based on Self-Oscillating and Self-Sensing Cantilever. Proceedings 2018, 2, 846. https://doi.org/10.3390/proceedings2130846
Zöllner J-P, Durstewitz S, Stauffenberg J, Ivanov T, Holz M, Ehrhardt W, Riegel W-U, Rangelow IW. Gas-Flow Sensor Based on Self-Oscillating and Self-Sensing Cantilever. Proceedings. 2018; 2(13):846. https://doi.org/10.3390/proceedings2130846
Chicago/Turabian StyleZöllner, Jens-Peter, Steve Durstewitz, Jaqueline Stauffenberg, Tzvetan Ivanov, Mathias Holz, Waleed Ehrhardt, W.-Ulrich Riegel, and Ivo W. Rangelow. 2018. "Gas-Flow Sensor Based on Self-Oscillating and Self-Sensing Cantilever" Proceedings 2, no. 13: 846. https://doi.org/10.3390/proceedings2130846
APA StyleZöllner, J.-P., Durstewitz, S., Stauffenberg, J., Ivanov, T., Holz, M., Ehrhardt, W., Riegel, W.-U., & Rangelow, I. W. (2018). Gas-Flow Sensor Based on Self-Oscillating and Self-Sensing Cantilever. Proceedings, 2(13), 846. https://doi.org/10.3390/proceedings2130846