Techniques to Compensate Propagation Impairments for Greater Accuracy in Localization for Sensors in Indoor Environments †

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Position Location Method
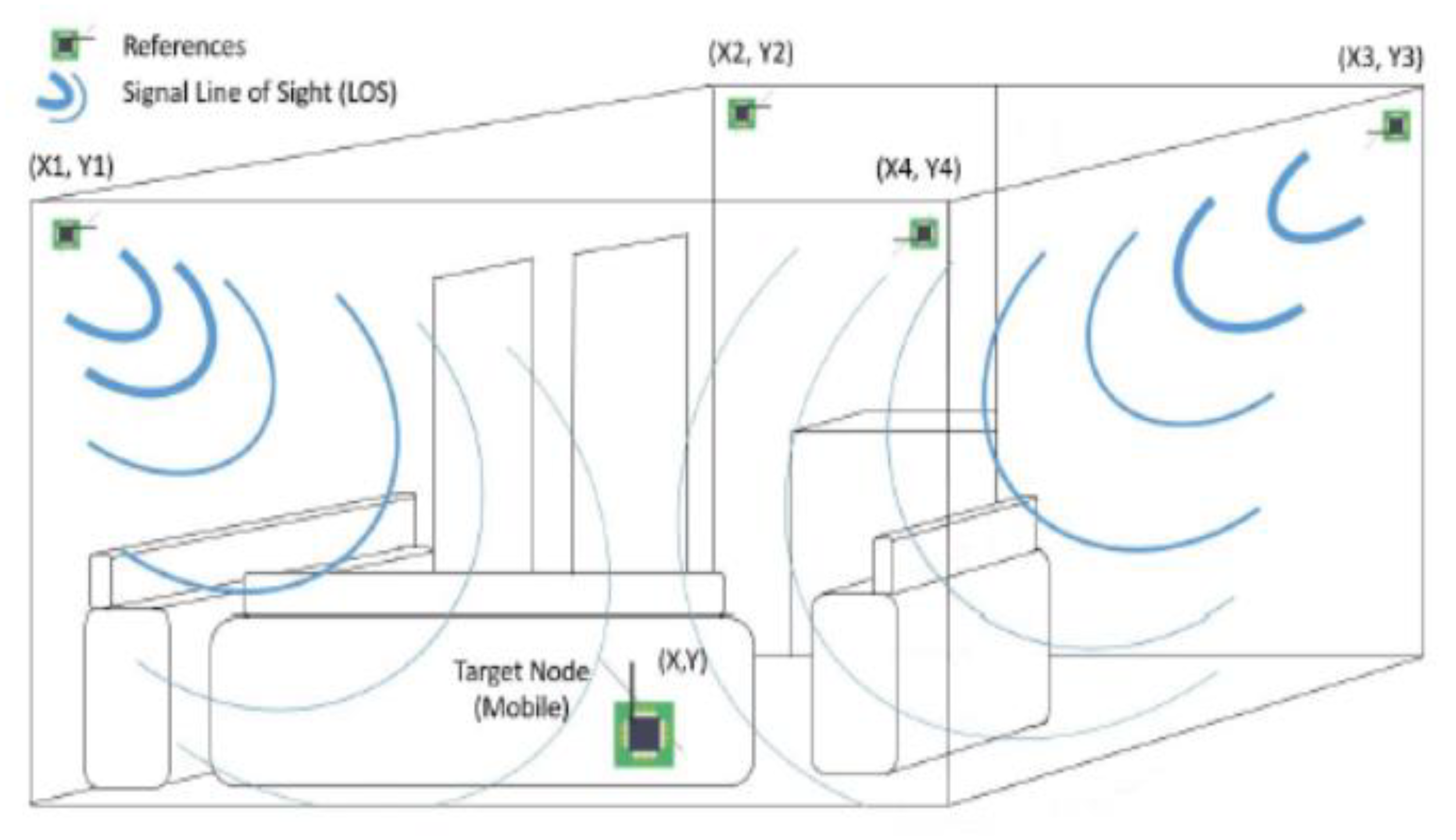
2.1. Experiment Setting
2.2. The Location Problem
- Evidence: It is the stage where measurements are made, received power evaluations (dBm) signals of the four reference antennas at different points of space are obtained.
- Estimation: it is the stage where the distance from the node of interest is calculated for each reference antenna using the propagation model and maximum likelihood criterion.
- Calculation of position: It is the stage where a system of equations based on estimated distances and Euclidean distances is generated and combined to calculate the estimated position of the node of interest.
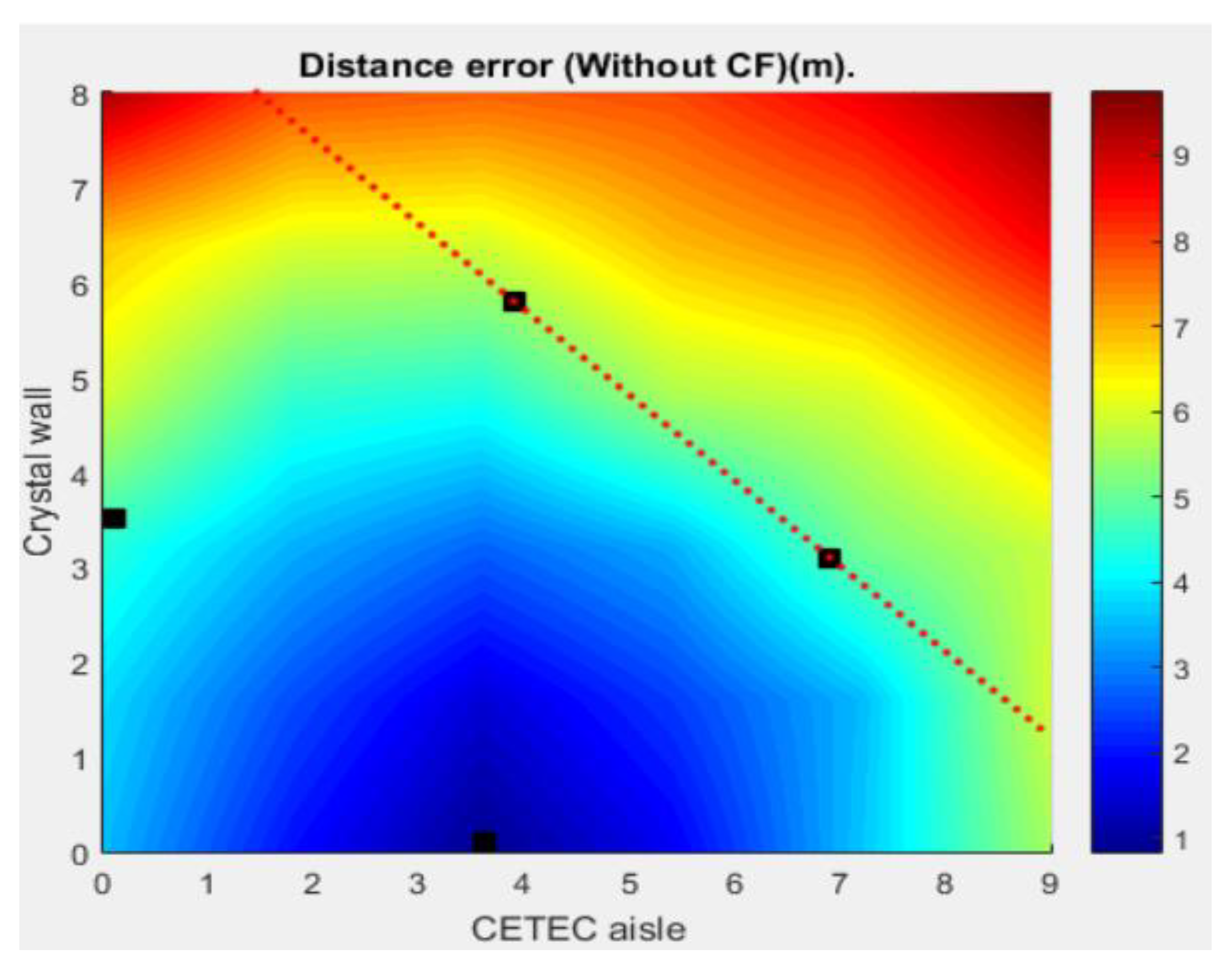
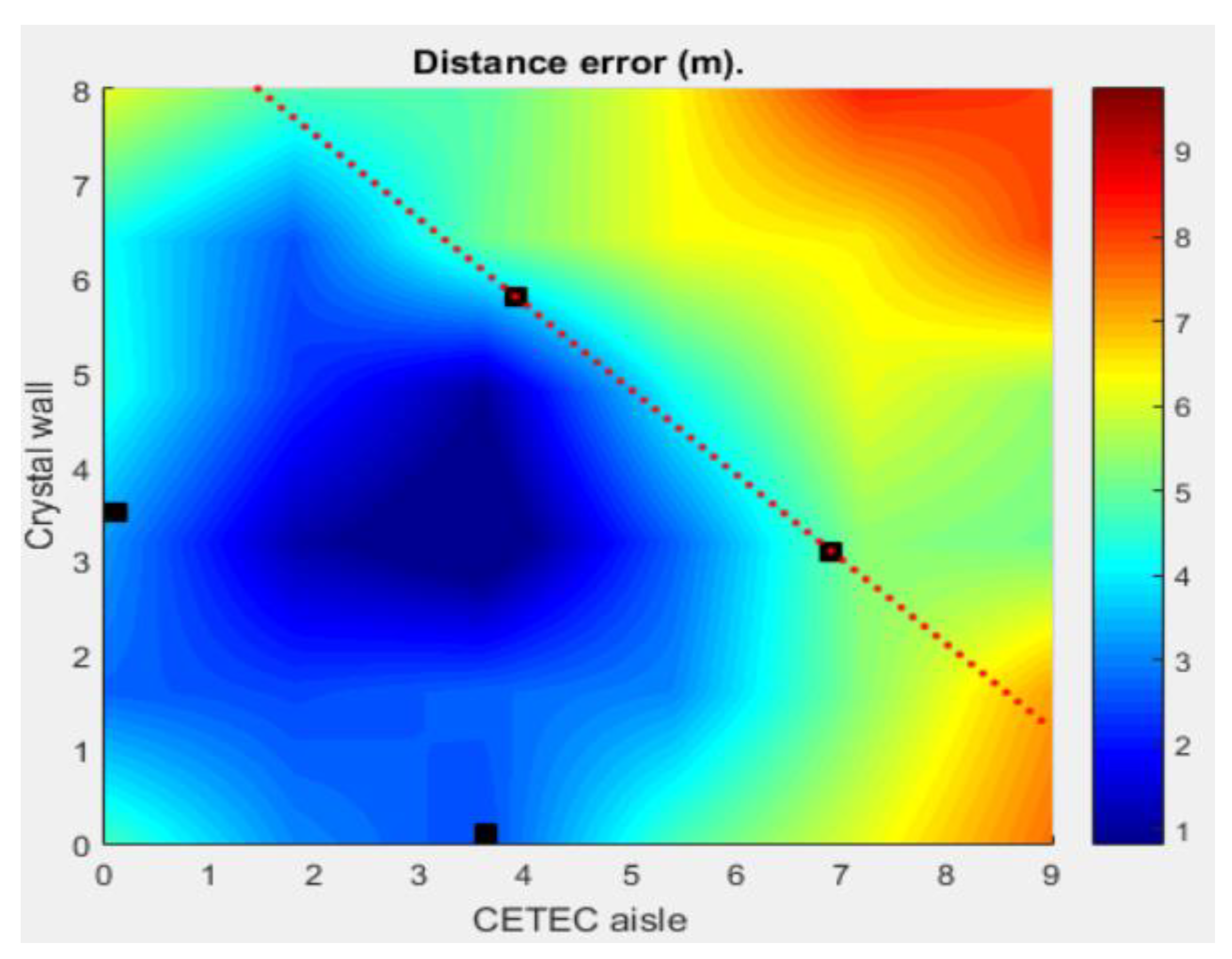
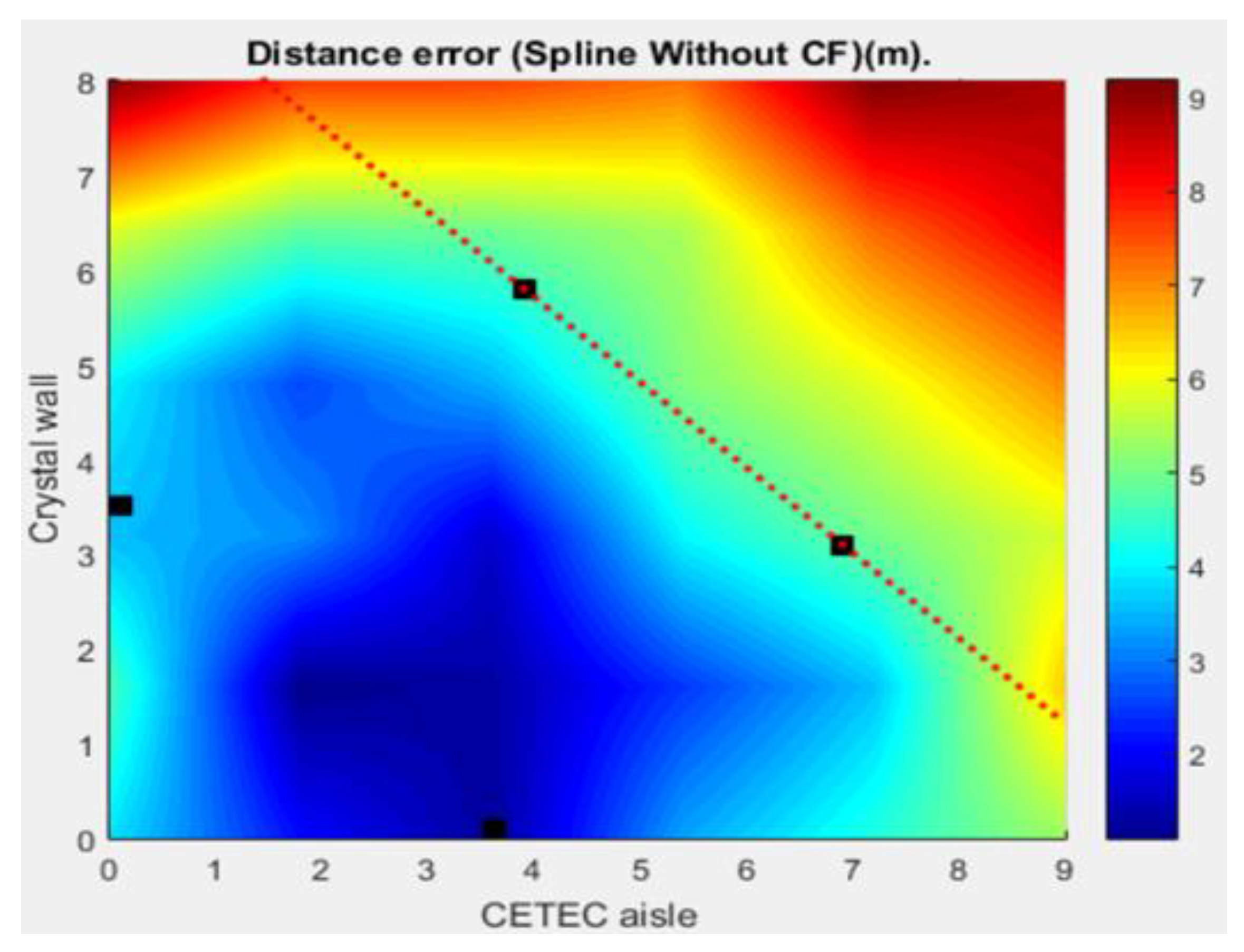
3. Results
Spline Interpolation
4. Discussion
5. Conclusions
Author Contributions
Acknowledgments
Conflicts of Interest
References
- Artemenko, O.; Schorcht, G.; Tarasov, M. A refinement scheme for location estimation process in indoor wireless sensor networks. In Proceedings of the IEEE GLOBECOM Workshops (GC Wkshps), Miami, FL, USA, 6–10 December 2010; pp. 225–229. [Google Scholar]
- Miraoui, A.; Mabrouk, K.; Snoussi, H.; Amerhaye, A.; Duchene, J. A large scale and low cost solution for real-time indoor localisation based on wireless sensor network. In Proceedings of the 7th International Workshop on Systems, Signal Processing and their Applications (WOSSPA), Tipaza, Algeria, 9–11 May 2011; pp. 392–395. [Google Scholar]
- Kuai, X.; Yang, K.; Fu, S.; Zheng, R.; Yang, G. Simultaneous localization and mapping (slam) for indoor autonomous mobile robot navigation in wireless sensor networks. In Proceedings of the 2010 International Conference on Networking, Sensing and Control (ICNSC), Chicago, IL, USA, 10–12 April 2010; pp. 128–132. [Google Scholar]
- Elnahrawy, E.; Li, X.; Martin, R. The limits of localization using signal strength: a comparative study. In Proceedings of the 2004 First Annual IEEE Communications Society Conference on Sensor and Ad Hoc Communications and Networks (IEEE SECON 2004), Santa Clara, CA, USA, 4–7 October 2004; pp. 406–414. [Google Scholar]
- Mautz, R. Indoor Positioning Technologies. Ph.D. Dissertation, ETH Zurich, Zurich, Switzerland, 2012. [Google Scholar]
- Yang, Z.; Zhou, Z.; Liu, Y. From RSSI to CSI: Indoor localization via channel response. ACM Comput. Surv. 2004, 46, 1–33. [Google Scholar] [CrossRef]
- Muñoz, D.; Bouchereau, F.; Vargas, C.; Enriquez-Caldera, R. Position Location Techniques and Applications, 1st ed.; Academic Press/Elsevier: Amsterdam, The Netherlands, 2009. [Google Scholar]
- Chavarria, E.O. Design and Implementation of a Radio Frequency for Indoor Localization. Master's Thesis, Instituto Tecnologico y de Estudios Superiores de Monterrey, Monterrey, NL, Mexico, December 2015. [Google Scholar]
- Haykin, S.S. Adaptive Filter Theory, 4th ed.; Prentice Hall: Upper Saddle River, NJ, USA, 2014. [Google Scholar]
- C. de, Boor. A Practical Guide to Splines; Springer-Verlag: New York, NY, USA, 1978. [Google Scholar]



Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2016 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Garcia-Davila, A.A.; Vargas-Rosales, C.; Ortega-Chavarria, E.; Gordillo-Moscoso, J.L. Techniques to Compensate Propagation Impairments for Greater Accuracy in Localization for Sensors in Indoor Environments. Proceedings 2017, 1, 16. https://doi.org/10.3390/ecsa-3-D003
Garcia-Davila AA, Vargas-Rosales C, Ortega-Chavarria E, Gordillo-Moscoso JL. Techniques to Compensate Propagation Impairments for Greater Accuracy in Localization for Sensors in Indoor Environments. Proceedings. 2017; 1(2):16. https://doi.org/10.3390/ecsa-3-D003
Chicago/Turabian StyleGarcia-Davila, Alvaro Alonso, Cesar Vargas-Rosales, Erasmo Ortega-Chavarria, and Jose Luis Gordillo-Moscoso. 2017. "Techniques to Compensate Propagation Impairments for Greater Accuracy in Localization for Sensors in Indoor Environments" Proceedings 1, no. 2: 16. https://doi.org/10.3390/ecsa-3-D003
APA StyleGarcia-Davila, A. A., Vargas-Rosales, C., Ortega-Chavarria, E., & Gordillo-Moscoso, J. L. (2017). Techniques to Compensate Propagation Impairments for Greater Accuracy in Localization for Sensors in Indoor Environments. Proceedings, 1(2), 16. https://doi.org/10.3390/ecsa-3-D003