

Discrete-Time Fractional-Order Sliding Mode Attitude Control of Multi-Spacecraft Systems Based on the Fully Actuated System Approach


Abstract
1. Introduction
- The proposed method combines the discrete-time fully actuated system approach with fractional-order control theory, and a sliding mode controller is developed to enable each spacecraft to track the desired attitude for the multi-spacecraft attitude system.
- Based on the fractional-order theory, a fractional-order discrete-time disturbance observer is designed to estimate the unknown disturbances, and the observer can complete the estimation of the disturbances.
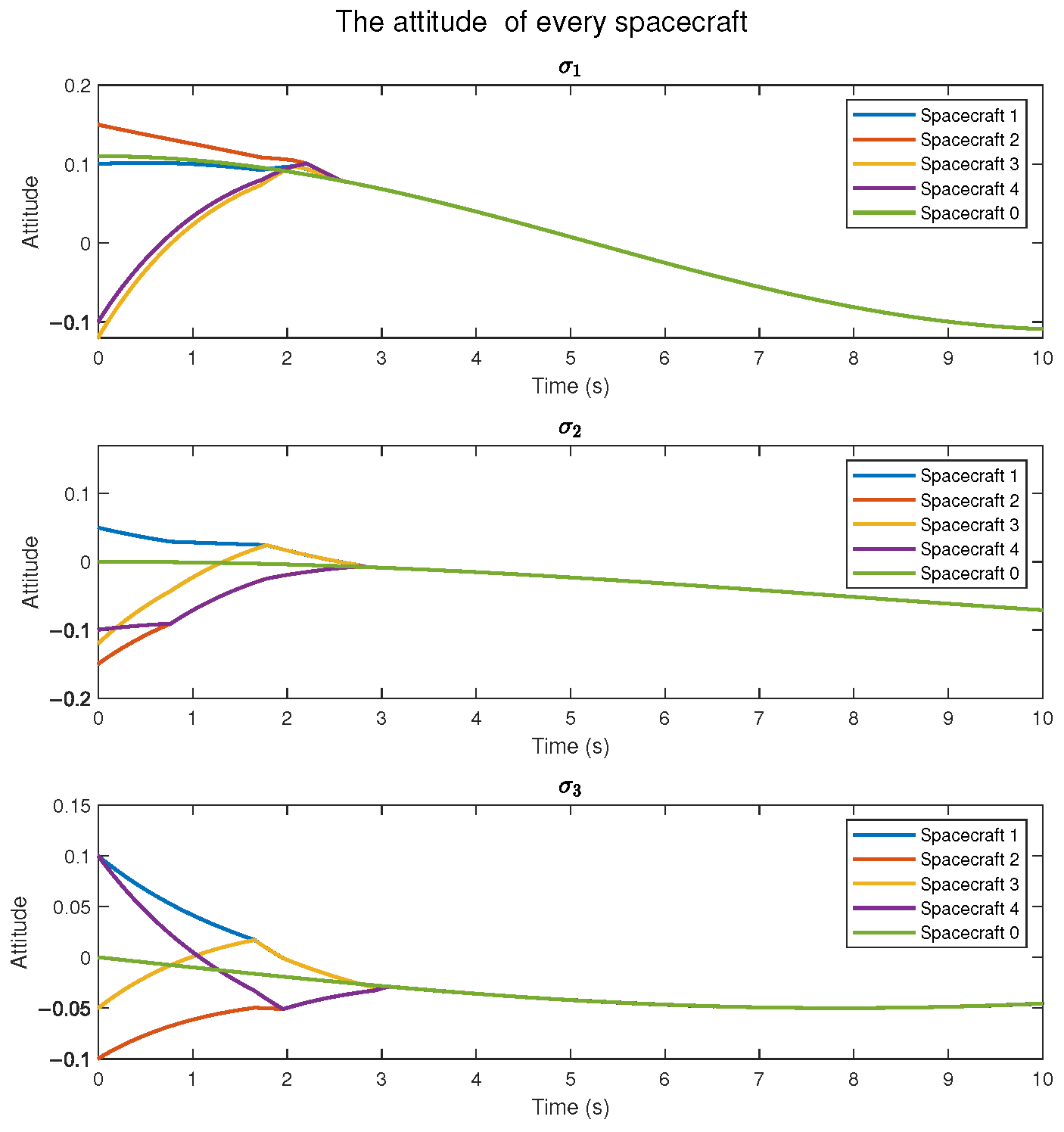
- Based on the Lyapunov theory and simulations, the boundedness of the observer estimation error and the attitude consensus of the multi-spacecraft system are proven.
2. Problem Statement and Preliminaries
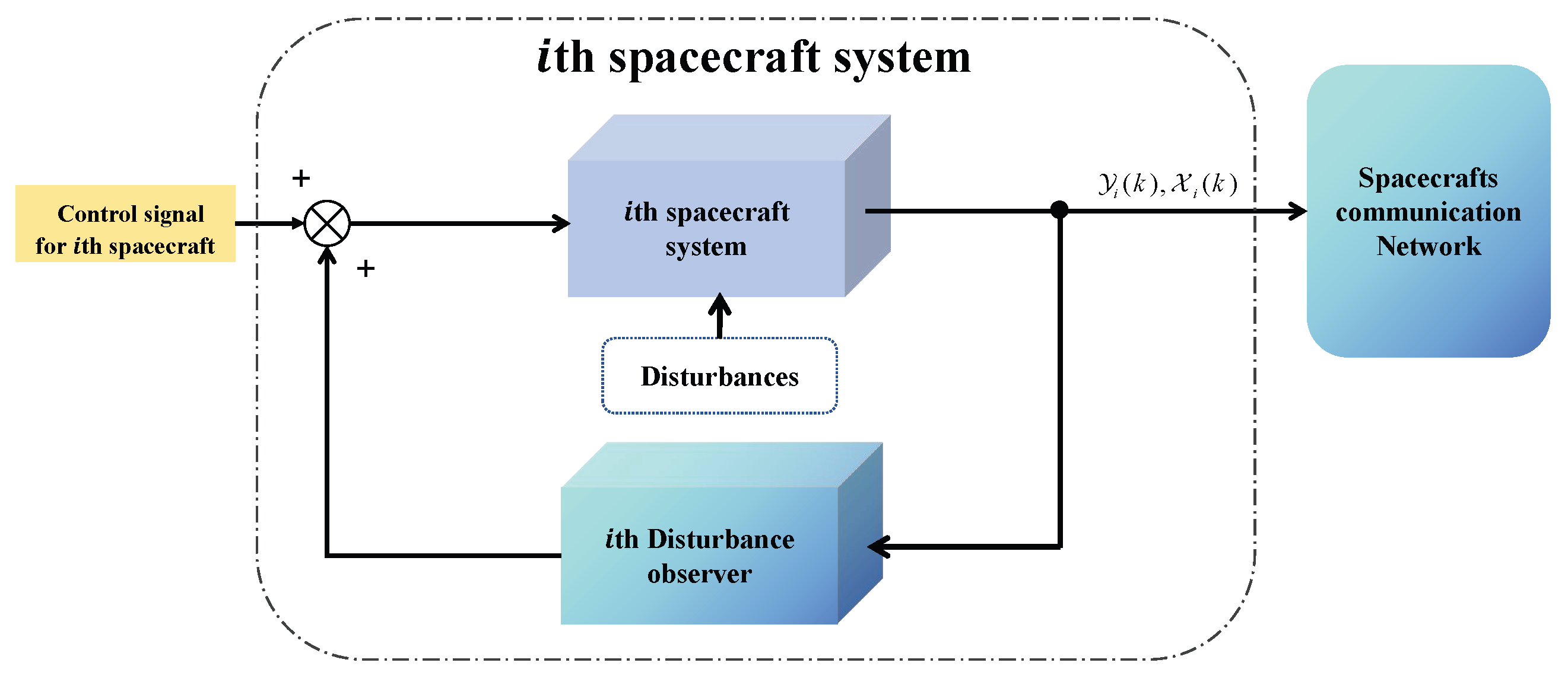
3. Discrete-Time Disturbance Observer Design
4. Fractional-Order Sliding Mode Controller Based on the Fully Actuated System Approach
4.1. Fully Actuated System Transition
4.2. Fractional-Order Sliding Mode Controller Design and Stability Analysis
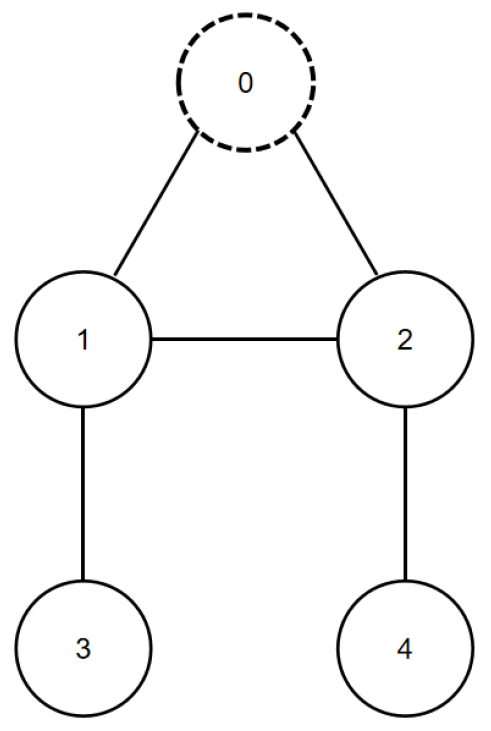
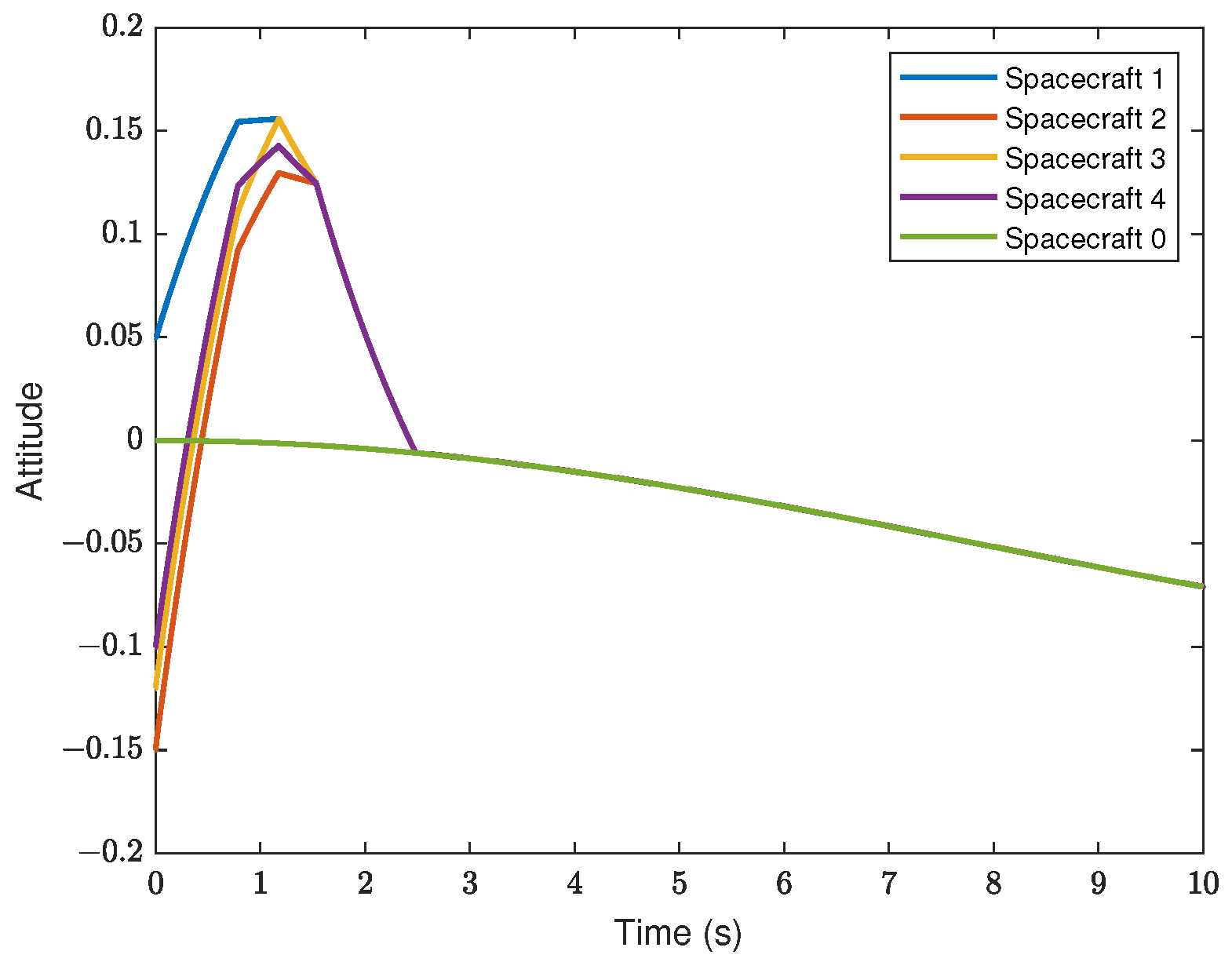
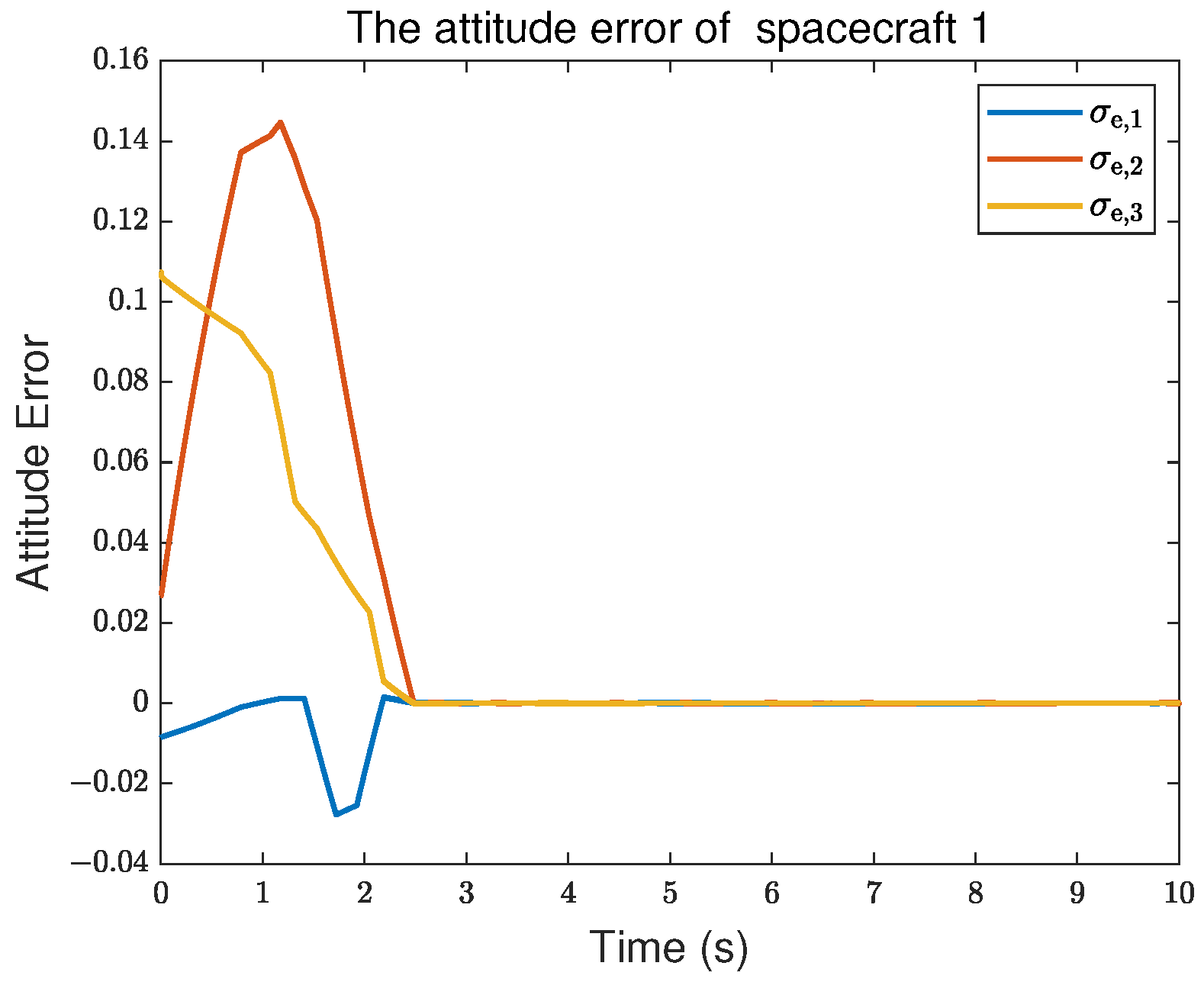
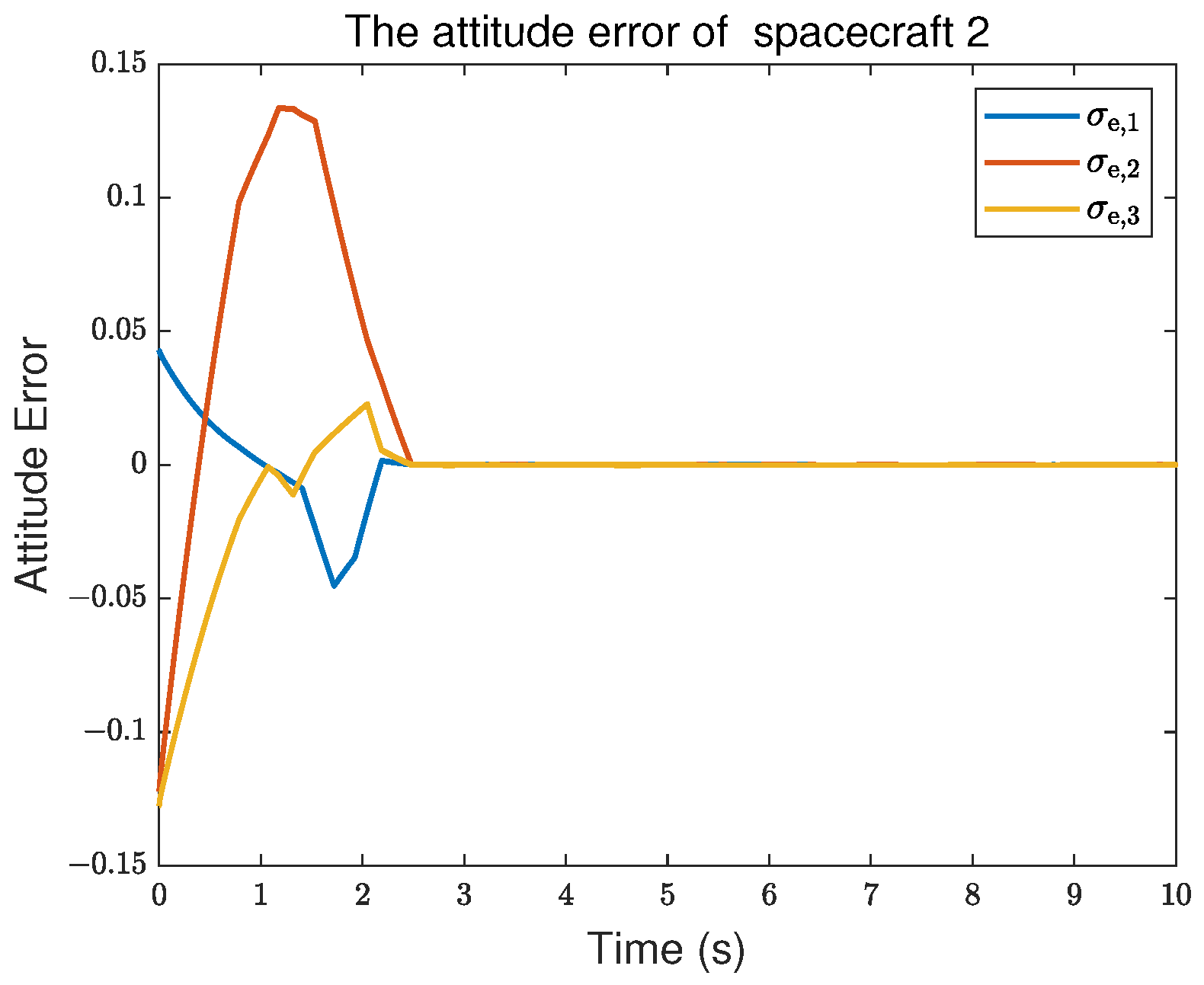
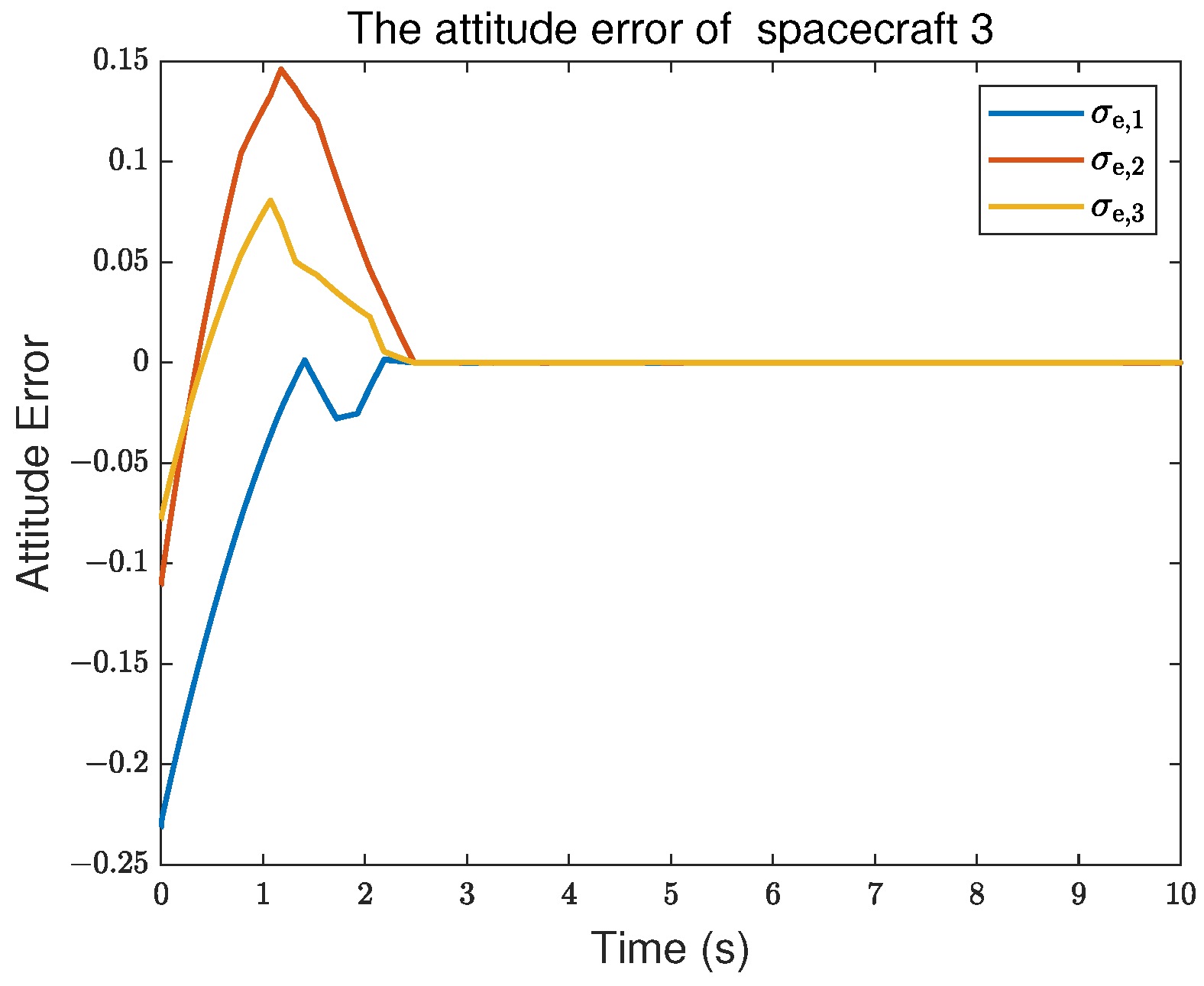
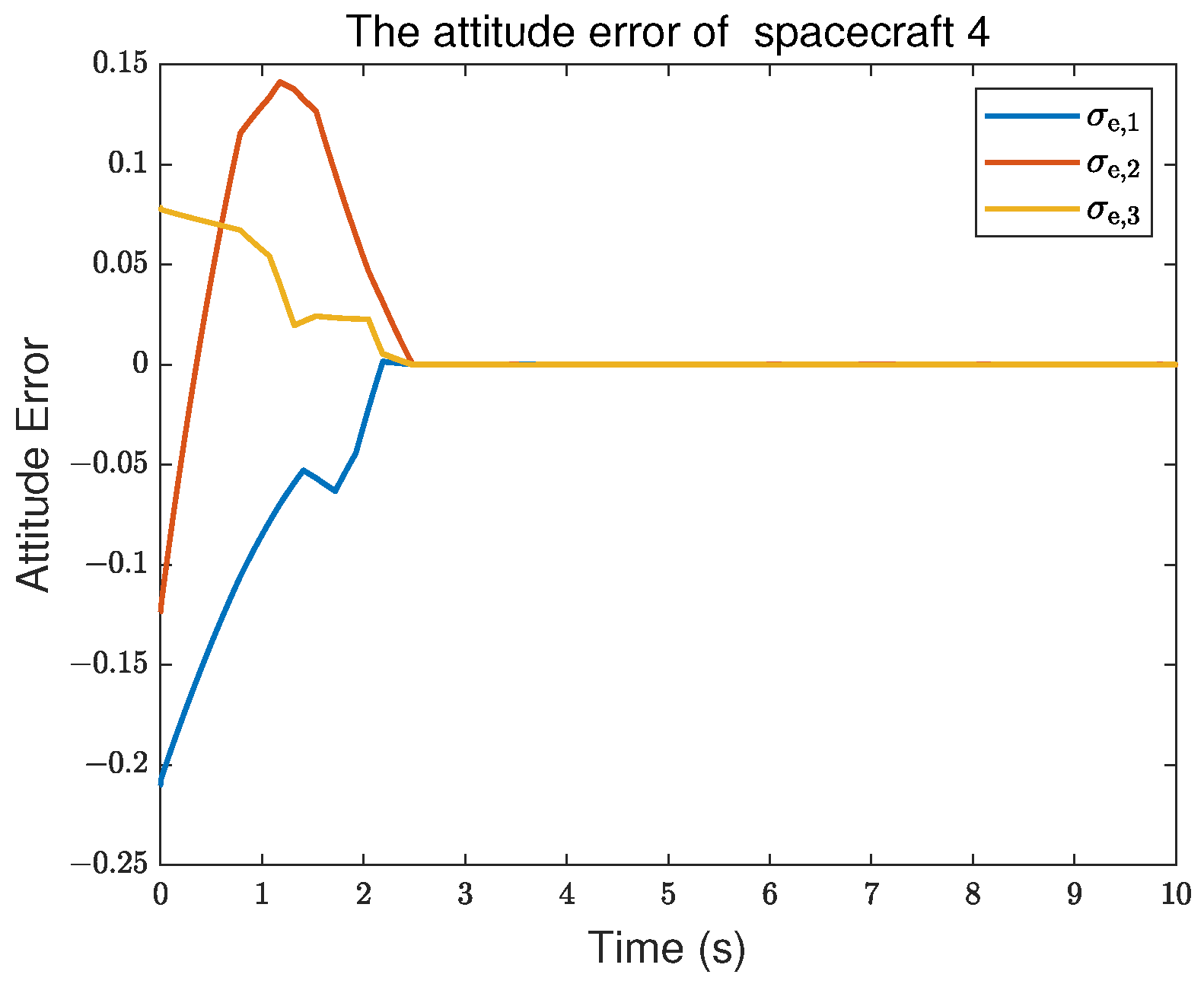
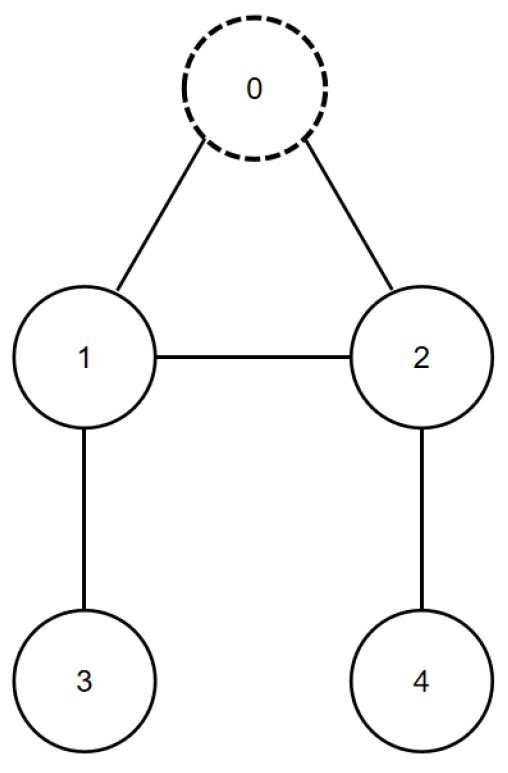
5. Simulation Results
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Sui, W.; Duan, G.; Hou, M.; Zhang, M. Distributed fixed-time attitude coordinated tracking for multiple rigid spacecraft via a novel integral sliding mode approach. J. Frankl. Inst. 2020, 357, 9399–9422. [Google Scholar] [CrossRef]
- Cui, B.; Zhang, L.; Xia, Y.; Zhang, J. Continuous distributed fixed-time attitude controller design for multiple spacecraft systems with a directed graph. IEEE Trans. Circuits Syst. II Express Briefs 2022, 69, 4478–4482. [Google Scholar] [CrossRef]
- Xu, C.; Wu, B.; Zhang, Y. Distributed prescribed-time attitude cooperative control for multiple spacecraft. Aerosp. Sci. Technol. 2021, 113, 106699. [Google Scholar] [CrossRef]
- Kang, Z.; Shen, Q.; Wu, S.; Damaren, C.J. Saturated attitude control of multispacecraft systems on SO(3) subject to mixed attitude constraints with arbitrary initial attitude. IEEE Trans. Aerosp. Electron. Syst. 2023, 59, 5158–5173. [Google Scholar]
- Yang, C.; Xia, Y. Interval uncertainty-oriented optimal control method for spacecraft attitude control. IEEE Trans. Aerosp. Electron. Syst. 2023, 59, 5460–5471. [Google Scholar] [CrossRef]
- Xie, X.; Sheng, T.; Chen, X. Dynamic event-triggered and self-triggered fault-tolerant attitude control for multiple spacecraft systems with uncertainties and input saturation. IEEE Trans. Aerosp. Electron. Syst. 2024, 60, 2922–2933. [Google Scholar] [CrossRef]
- Campos-Martínez, S.N.; Hernández-González, O.; Guerrero-Sánchez, M.E.; Valencia-Palomo, G.; Targui, B.; López-Estrada, F.R. Consensus Tracking Control of Multiple Unmanned Aerial Vehicles Subject to Distinct Unknown Delays. Machines 2024, 12, 337. [Google Scholar] [CrossRef]
- Wu, Y.; Sun, X.; Wang, T.; Wang, J. PD-like Consensus Tracking Algorithm for Discrete Multi-Agent Systems with Time-Varying Reference State Under Binary-Valued Communication. Actuators 2025, 14, 267. [Google Scholar] [CrossRef]
- Chang, X.; Yang, Y.; Zhang, Z.; Jiao, J.; Cheng, H.; Fu, W. Consensus-Based Formation Control for Heterogeneous Multi-Agent Systems in Complex Environments. Drones 2025, 9, 175. [Google Scholar] [CrossRef]
- Abidi, K.; Xu, J.X. Advanced Discrete-Time Control; Springer: Singapore, 2015. [Google Scholar]
- Laila, D.S.; Lovera, M.; Astolfi, A. A discrete-time observer design for spacecraft attitude determination using an orthogonality-preserving algorithm. Automatica 2011, 47, 975–980. [Google Scholar] [CrossRef]
- Lee, K.; Park, C.; Lee, T.; Park, S.Y. Spacecraft formation keeping via discrete-time Hamilton-Jacobi theory. In Proceedings of the AIAA Guidance, Navigation, and Control Conference, San Diego, CA, USA, 4–8 January 2016; p. 0874. [Google Scholar]
- Phogat, K.S.; Chatterjee, D.; Banavar, R. Discrete-time optimal attitude control of a spacecraft with momentum and control constraints. J. Guid. Control Dyn. 2018, 41, 199–211. [Google Scholar] [CrossRef]
- Duan, G. High-order fully actuated system approaches: Part I. Models and basic procedure. Int. J. Syst. Sci. 2021, 52, 422–435. [Google Scholar] [CrossRef]
- Duan, G. High-order fully actuated system approaches: Part X. Basics of discrete-time systems. Int. J. Syst. Sci. 2022, 53, 810–832. [Google Scholar] [CrossRef]
- Wang, X.; Duan, G. Fully actuated system approaches: Predictive elimination control for discrete-time nonlinear time-varying systems with full state constraints and time-varying delays. IEEE Trans. Circuits Syst. I Regul. Pap. 2023, 71, 383–396. [Google Scholar] [CrossRef]
- Yu, X.; Feng, Y.; Man, Z. Terminal sliding mode control—An overview. IEEE Open J. Ind. Electron. Soc. 2020, 2, 36–52. [Google Scholar] [CrossRef]
- Utkin, V.; Poznyak, A.; Orlov, Y.; Polyakov, A. Conventional and high order sliding mode control. J. Frankl. Inst. 2020, 357, 10244–10261. [Google Scholar] [CrossRef]
- Chen, L.; Yan, Y.; Mu, C.; Sun, C. Characteristic model-based discrete-time sliding mode control for spacecraft with variable tilt of flexible structures. IEEE/CAA J. Autom. Sin. 2016, 3, 42–50. [Google Scholar] [CrossRef]
- Chen, Z.; Ju, X.; Wang, Z.; Li, Q. The prescribed time sliding mode control for attitude tracking of spacecraft. Asian J. Control 2022, 24, 1650–1662. [Google Scholar] [CrossRef]
- Tan, J.; Zhang, K.; Li, B.; Wu, A.G. Event-triggered sliding mode control for spacecraft reorientation with multiple attitude constraints. IEEE Trans. Aerosp. Electron. Syst. 2023, 59, 6031–6043. [Google Scholar] [CrossRef]
- Chen, Y.; Petras, I.; Xue, D. Fractional order control-a tutorial. In Proceedings of the 2009 American Control Conference, St. Louis, MO, USA, 10–12 June 2009; pp. 1397–1411. [Google Scholar]
- Xue, D. Fractional-Order Control Systems: Fundamentals and Numerical Implementations; Walter de Gruyter GmbH & Co KG: Berlin, Germany, 2017; Volume 1. [Google Scholar]
- Tepljakov, A.; Alagoz, B.B.; Yeroglu, C.; Gonzalez, E.A.; Hosseinnia, S.H.; Petlenkov, E.; Ates, A.; Cech, M. Towards industrialization of FOPID controllers: A survey on milestones of fractional-order control and pathways for future developments. IEEE Access 2021, 9, 21016–21042. [Google Scholar] [CrossRef]
- Muresan, C.I.; Birs, I.; Ionescu, C.; Dulf, E.H.; De Keyser, R. A review of recent developments in autotuning methods for fractional-order controllers. Fractal Fract. 2022, 6, 37. [Google Scholar] [CrossRef]
- Sopasakis, P.; Sarimveis, H. Stabilising model predictive control for discrete-time fractional-order systems. Automatica 2017, 75, 24–31. [Google Scholar] [CrossRef]
- Sun, G.; Ma, Z.; Yu, J. Discrete-time fractional order terminal sliding mode tracking control for linear motor. IEEE Trans. Ind. Electron. 2017, 65, 3386–3394. [Google Scholar] [CrossRef]
- Zhang, F.; Yang, C.; Zhou, X.; Gui, W. Optimal setting and control strategy for industrial process based on discrete-time fractional-order PID. IEEE Access 2019, 7, 47747–47761. [Google Scholar] [CrossRef]
- Ekinci, S.; Izci, D.; Turkeri, C.; Ahmad, M.A. Spider Wasp Optimizer-Optimized Cascaded Fractional-Order Controller for Load Frequency Control in a Photovoltaic-Integrated Two-Area System. Mathematics 2024, 12, 3076. [Google Scholar] [CrossRef]
- Gupta, D.K.; Dei, G.; Soni, A.K.; Jha, A.V.; Appasani, B.; Bizon, N.; Srinivasulu, A.; Nsengiyumva, P. Fractional order PID controller for load frequency control in a deregulated hybrid power system using Aquila Optimization. Results Eng. 2024, 23, 102442. [Google Scholar] [CrossRef]
- Shao, S.; Chen, M. Robust discrete-time fractional-order control for an unmanned aerial vehicle based on disturbance observer. Int. J. Robust Nonlinear Control 2022, 32, 4665–4682. [Google Scholar] [CrossRef]
- Wu, F.; Liu, M.; Feng, Z.; Cao, X. Fractional-order sliding mode attitude coordinated control for spacecraft formation flying with unreliable wireless communication. IET Control Theory Appl. 2023, 17, 368–380. [Google Scholar] [CrossRef]
- Meng, Z.; Ren, W.; You, Z. Distributed finite-time attitude containment control for multiple rigid bodies. Automatica 2010, 46, 2092–2099. [Google Scholar] [CrossRef]
- Lu, M.; Liu, L. Leader-following attitude consensus of multiple rigid spacecraft systems under switching networks. IEEE Trans. Autom. Control 2019, 65, 839–845. [Google Scholar] [CrossRef]
- Mareels, I.M.; Penfold, H.; Evans, R.J. Controlling nonlinear time-varying systems via Euler approximations. Automatica 1992, 28, 681–696. [Google Scholar] [CrossRef]
- Xie, S.; Chen, Q.; He, X. Predefined-Time Approximation-Free Attitude Constraint Control of Rigid Spacecraft. IEEE Trans. Aerosp. Electron. Syst. 2023, 59, 347–358. [Google Scholar] [CrossRef]
- Sun, X.; Shen, Q.; Wu, S. Fuzzy Supervised Learning-Based Model-Free Adaptive Fault-Tolerant Spacecraft Attitude Control With Deferred Asymmetric Constraints. IEEE Trans. Aerosp. Electron. Syst. 2023, 59, 8884–8900. [Google Scholar] [CrossRef]
- Meng, W.; Liu, S.; Zeng, B.; Fang, Z. Mutual invertibility of discrete fractional summation operator and difference operator. Math. Pract. Theory 2015, 6, 261–266. [Google Scholar]
- Duan, G. High-order fully actuated system approaches: Part VII. Controllability, stabilisability and parametric designs. Int. J. Syst. Sci. 2021, 52, 3091–3114. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Controller Type | Maximum Overshoot | Settling Time | Square Error |
|---|---|---|---|
| Proposed controller | 0.14 | <3 s | 36.9631 |
| Integer-order sliding mode controller | 0.25 | <5 s | 145.9648 |
| Fractional-order backstepping controller | No Overshoot | <7 s | 12.3702 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, Y.; Shao, S. Discrete-Time Fractional-Order Sliding Mode Attitude Control of Multi-Spacecraft Systems Based on the Fully Actuated System Approach. Fractal Fract. 2025, 9, 435. https://doi.org/10.3390/fractalfract9070435
Chen Y, Shao S. Discrete-Time Fractional-Order Sliding Mode Attitude Control of Multi-Spacecraft Systems Based on the Fully Actuated System Approach. Fractal and Fractional. 2025; 9(7):435. https://doi.org/10.3390/fractalfract9070435
Chicago/Turabian StyleChen, Yiqi, and Shuyi Shao. 2025. "Discrete-Time Fractional-Order Sliding Mode Attitude Control of Multi-Spacecraft Systems Based on the Fully Actuated System Approach" Fractal and Fractional 9, no. 7: 435. https://doi.org/10.3390/fractalfract9070435
APA StyleChen, Y., & Shao, S. (2025). Discrete-Time Fractional-Order Sliding Mode Attitude Control of Multi-Spacecraft Systems Based on the Fully Actuated System Approach. Fractal and Fractional, 9(7), 435. https://doi.org/10.3390/fractalfract9070435