
Global Mittag-Leffler Synchronization of Fractional-Order Fuzzy Inertia Neural Networks with Reaction–Diffusion Terms Under Boundary Control

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
- (1)
- In view of the complexity of the actual network, fuzzy rules, the state’s reaction–diffusion term and the state derivative’s reaction–diffusion term are all introduced into the fractional-order INN model simultaneously, which is more general than the traditional fractional-order INN [23,24,25,27,28].
- (2)
- (3)
2. Preliminaries and Model Description
2.1. Fractional Calculus Definition and Properties
2.2. Model Description
3. Main Results
3.1. Synchronization Analysis Under Neumann Boundary Condition
3.2. Synchronization Analysis Under Mixed Boundary Condition
3.3. Synchronization Analysis Under Robin Boundary Condition
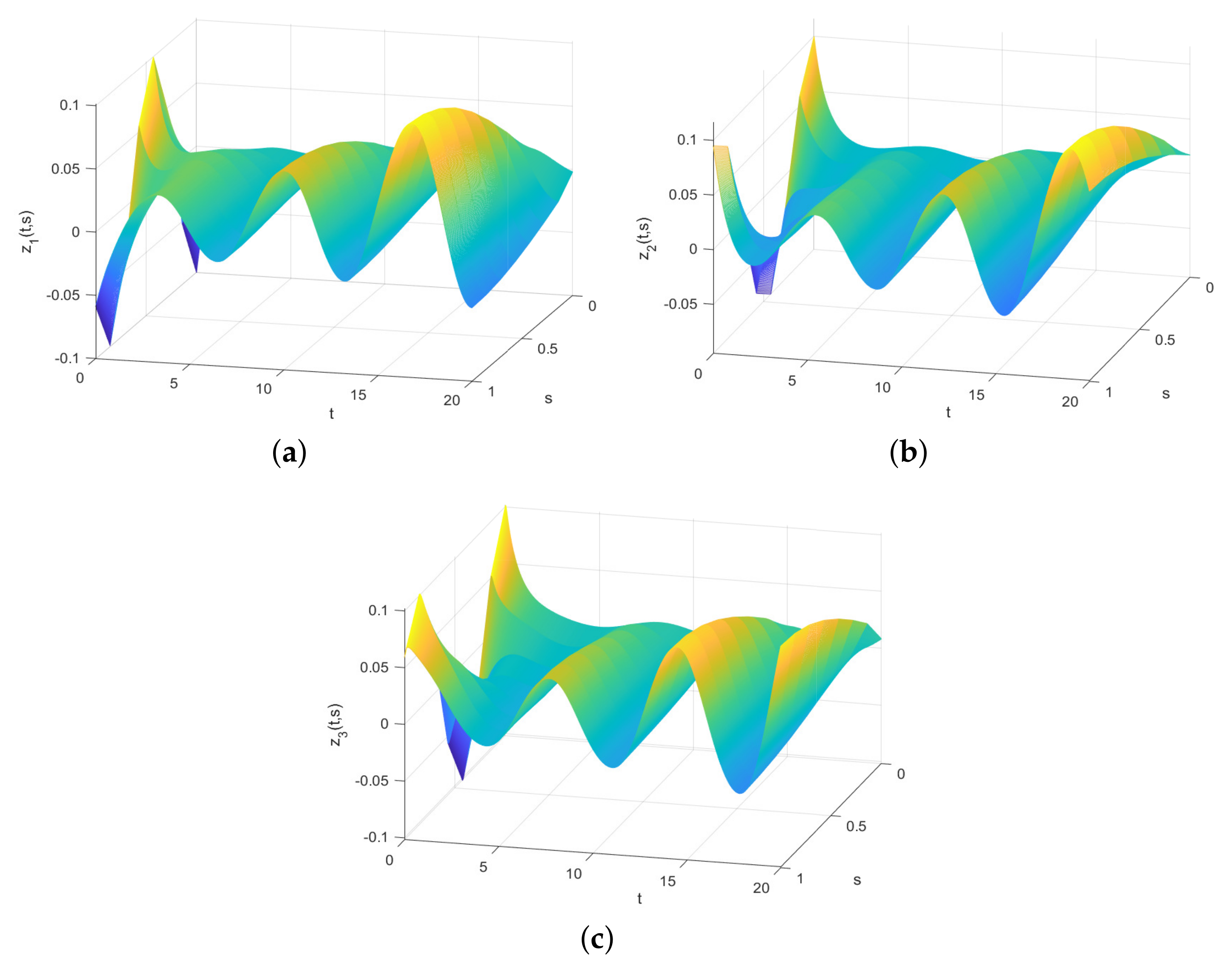
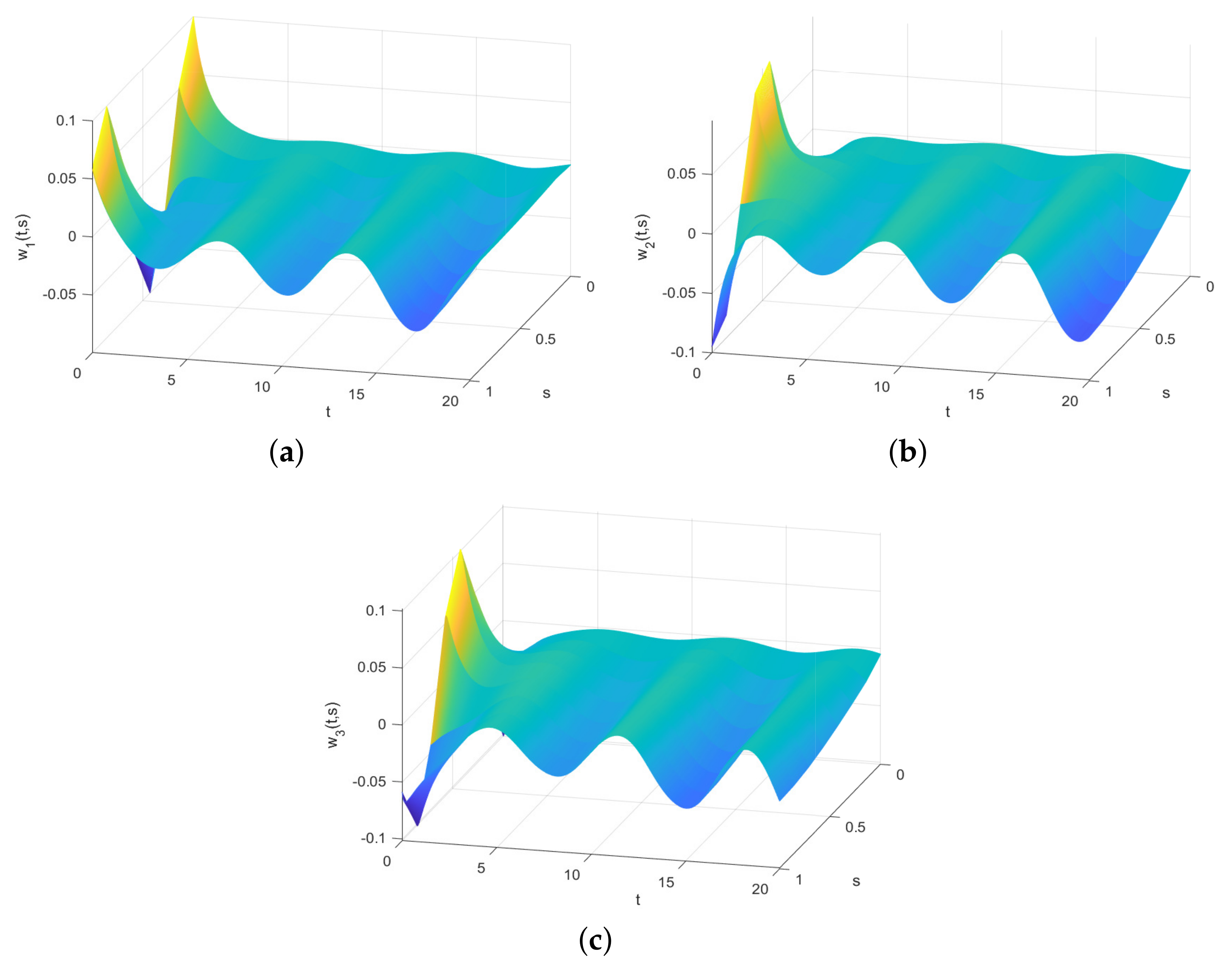
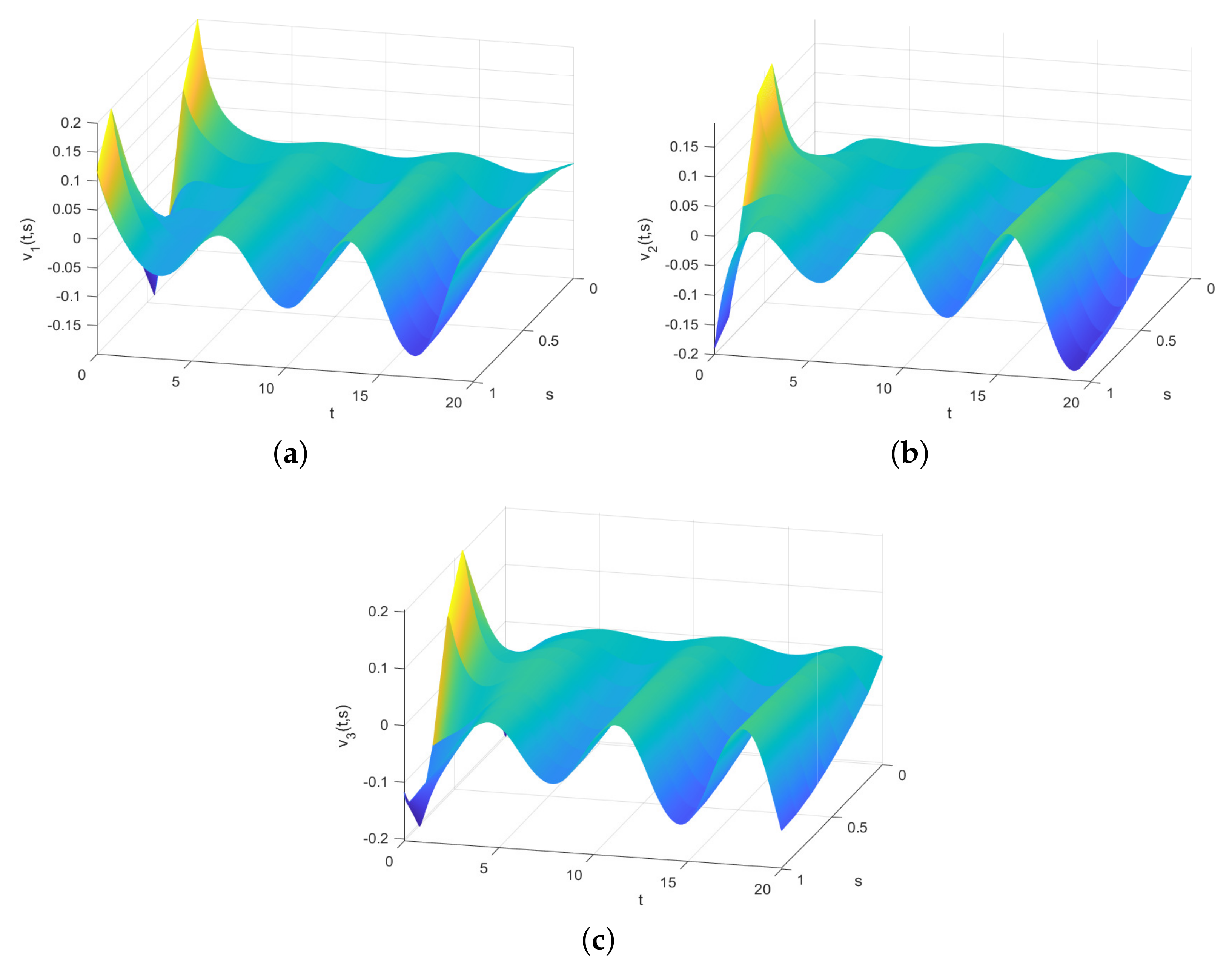
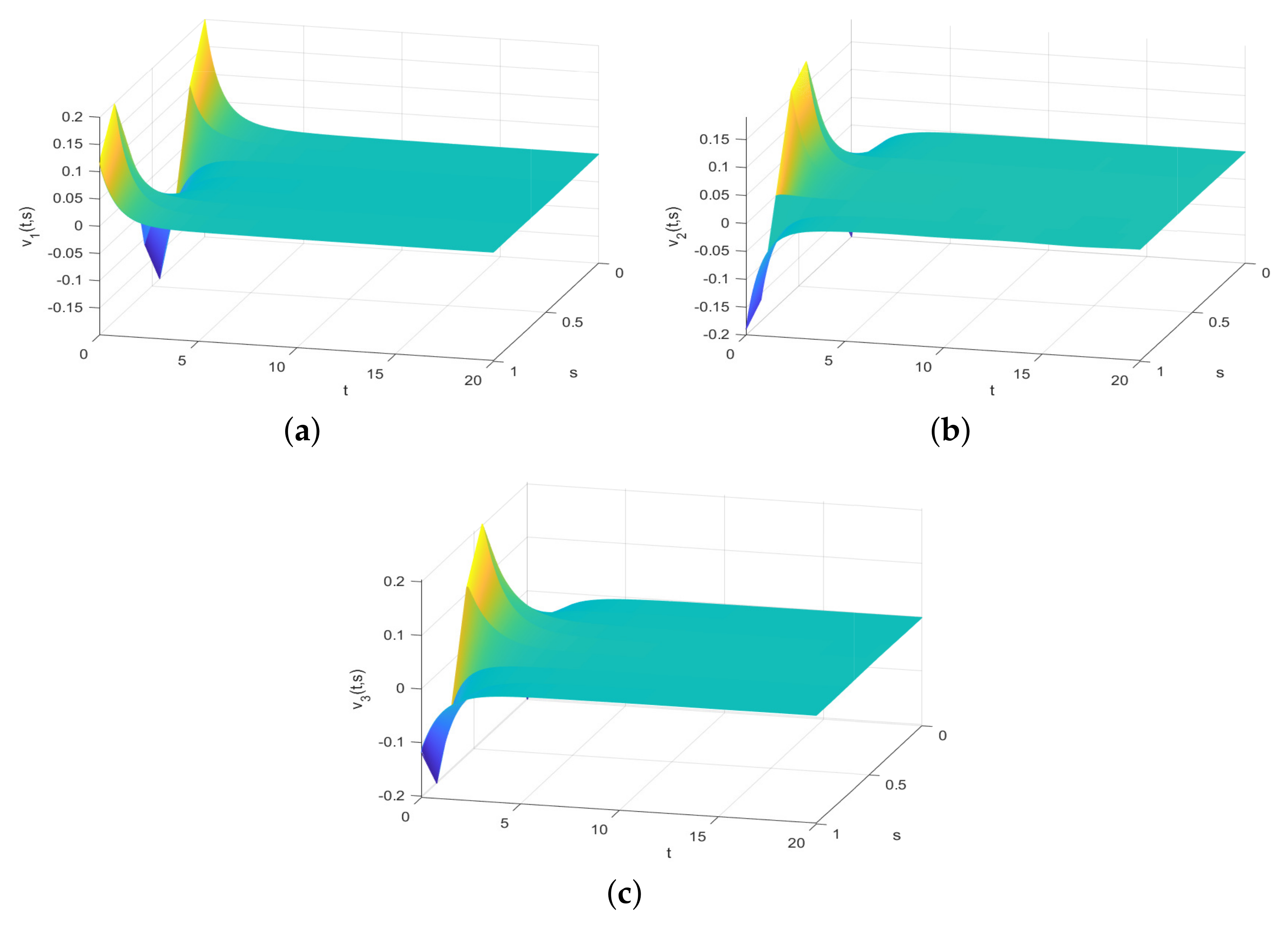
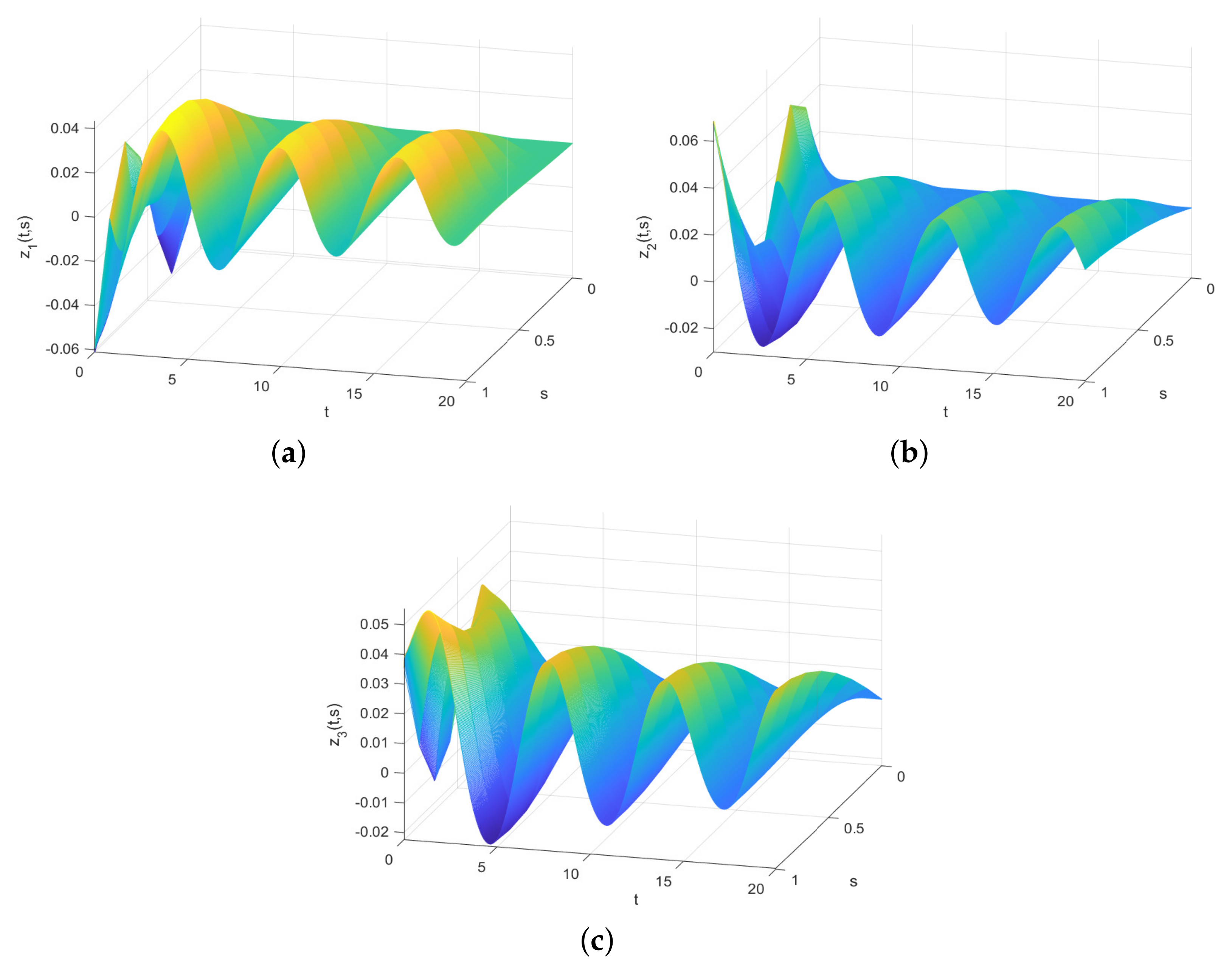
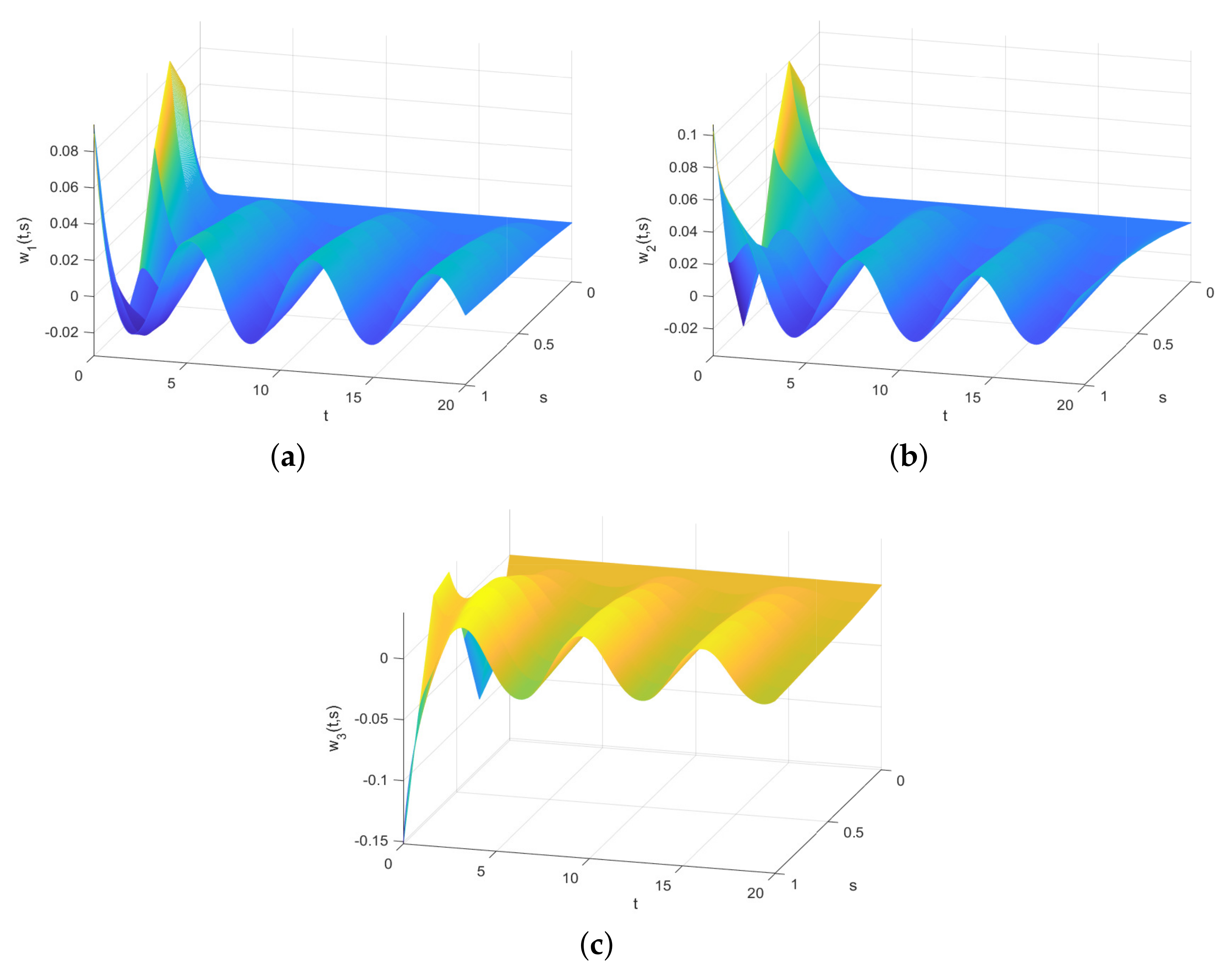
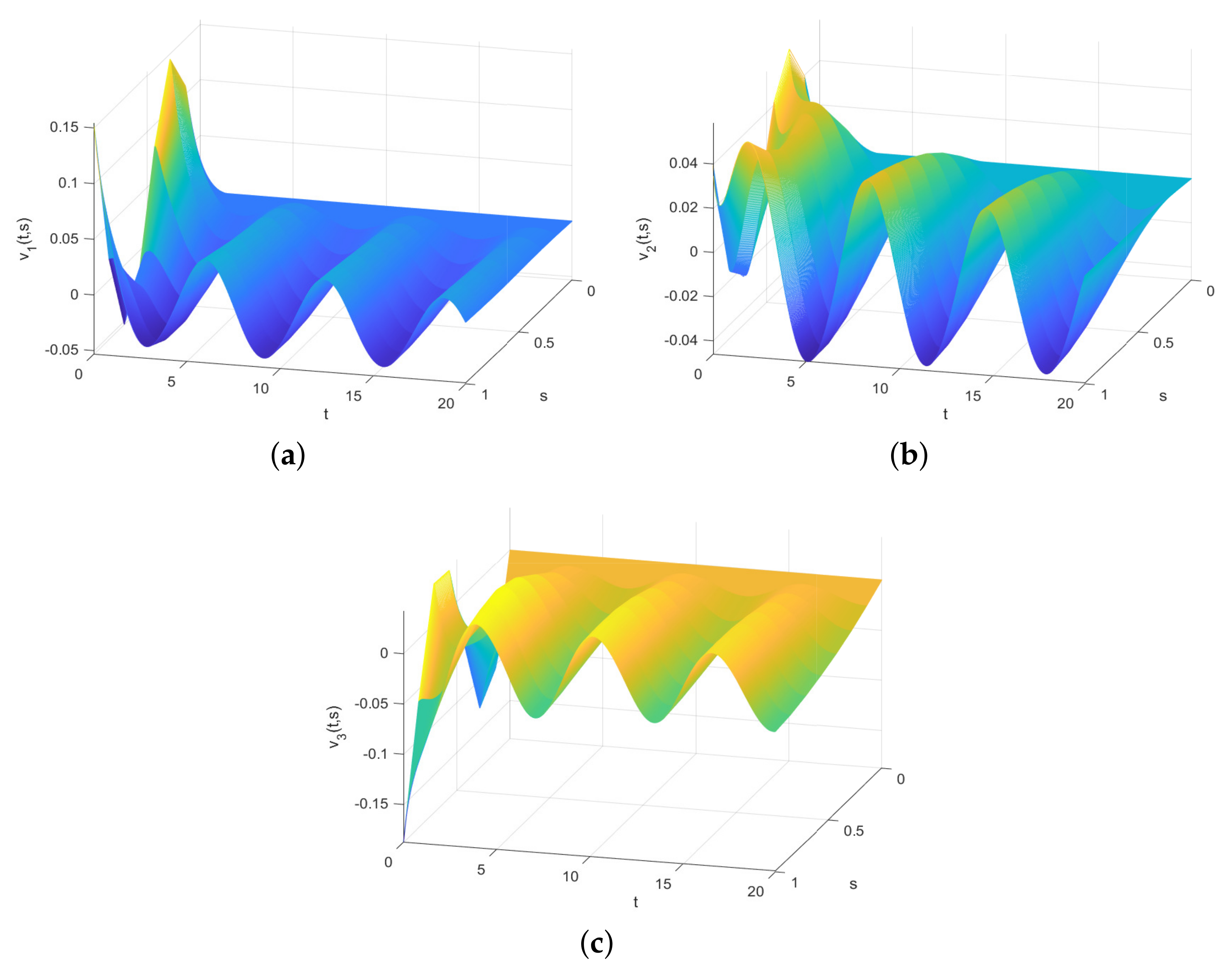
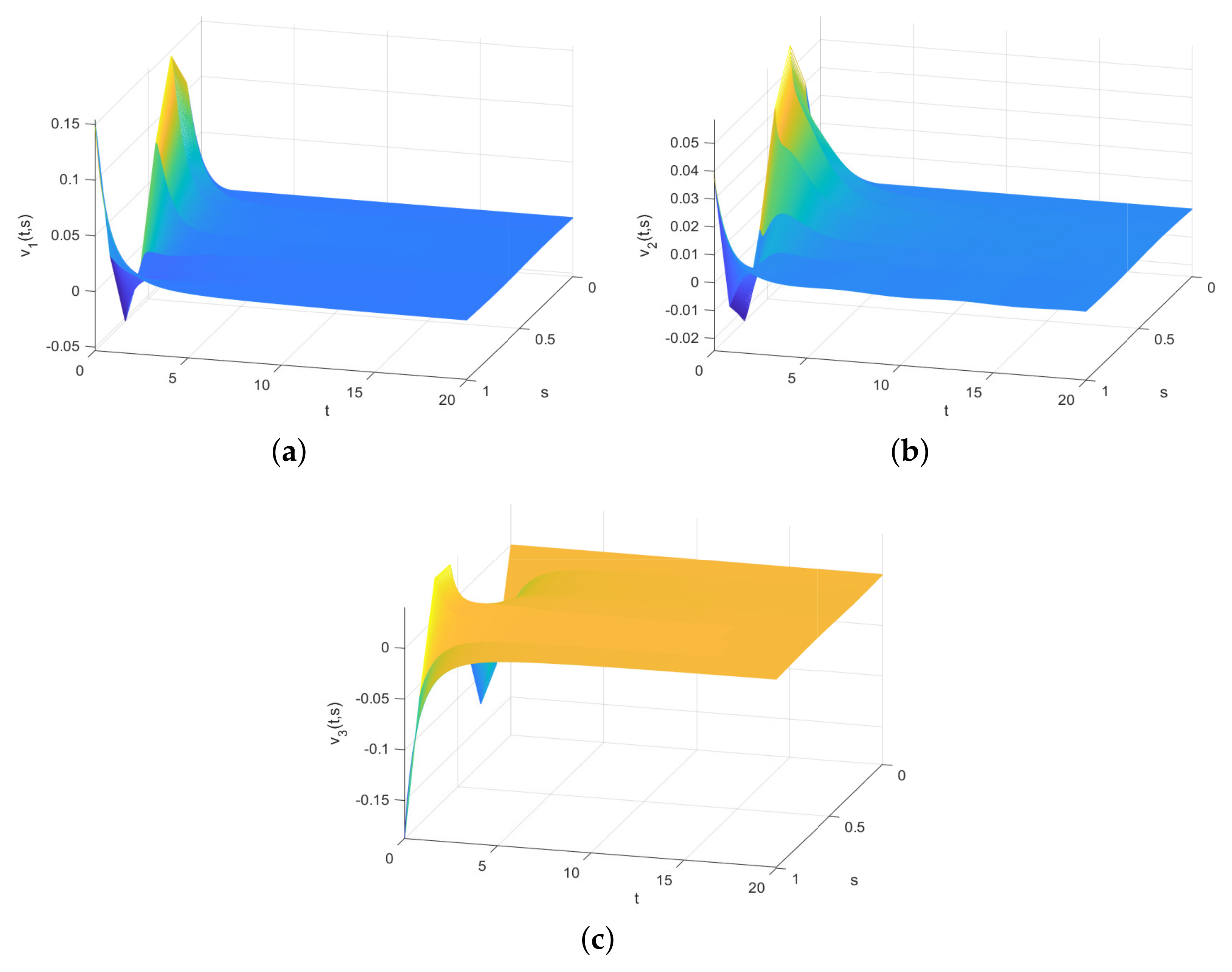
4. Numerical Simulations
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Chen, C.; Wu, Y.; Dai, Q.; Zhou, H.Y.; Xu, M.; Yang, S.; Han, X.; Yu, Y. A survey on graph neural networks and graph transformers in computer vision: A task-oriented perspective. IEEE Trans. Pattern Anal. Mach. Intell. 2024, 46, 10297–10318. [Google Scholar] [CrossRef] [PubMed]
- Du, J.; Bai, Y.; Li, Y.; Geng, J.; Huang, Y.; Chen, H. Evolutionary end-to-end autonomous driving model with continuous-time neural networks. IEEE/ASME Trans. Mechatron. 2024, 29, 2983–2990. [Google Scholar] [CrossRef]
- Shi, J.; Chen, T.; Lai, W.; Zhang, S.; Li, X. Pretrained quantum-inspired deep neural network for natural language processing. IEEE Trans. Cybern. 2024, 54, 5973–5985. [Google Scholar] [CrossRef] [PubMed]
- Bi, X.A.; Chen, K.; Jiang, S.; Luo, S.; Zhou, W.; Xing, Z.; Xu, L.; Liu, Z.; Liu, T. Community graph convolution neural network for alzheimer’s disease classification and pathogenetic factors identification. IEEE Trans. Neural Netw. Learn. Syst. 2025, 36, 1959–1973. [Google Scholar] [CrossRef]
- Li, P.; Gao, R.; Xu, C.; Li, Y.; Akgül, A.; Baleanu, D. Dynamics exploration for a fractional-order delayed zooplankton–phytoplankton system. Chaos Solitons Fractals 2023, 166, 112975. [Google Scholar] [CrossRef]
- Xua, C.; Liaob, M.; Farman, M.; Shehzade, A. Hydrogenolysis of glycerol by heterogeneous catalysis: A fractional order kinetic model with analysis. MATCH Commun. Math. Comput. Chem. 2024, 91, 635–664. [Google Scholar] [CrossRef]
- Yang, S.; Hu, C.; Yu, J.; Jiang, H. Exponential stability of fractional-order impulsive control systems with applications in synchronization. IEEE Trans. Cybern. 2020, 50, 3157–3168. [Google Scholar] [CrossRef]
- Cao, S.; Chen, Y. Data-driven controllability and controller designs for nabla fractional order systems. IEEE Control Syst. Lett. 2024, 8, 3033–3038. [Google Scholar] [CrossRef]
- Yan, Y.; Zhang, H.; Mu, Y.; Sun, J. Fault-tolerant fuzzy-resilient control for fractional-order stochastic underactuated system with unmodeled dynamics and actuator saturation. IEEE Trans. Cybern. 2023, 54, 988–998. [Google Scholar] [CrossRef]
- Cao, B.; Nie, X.; Zheng, W.X.; Cao, J. Multistability of state-dependent switched fractional-order hopfield neural networks with mexican-hat activation function and its application in associative memories. IEEE Trans. Neural Netw. Learn. Syst. 2025, 36, 1213–1227. [Google Scholar] [CrossRef]
- Arena, P.; Fortuna, L.; Porto, D. Chaotic behavior in noninteger-order cellular neural networks. Phys. Rev. E 2000, 61, 776. [Google Scholar] [CrossRef] [PubMed]
- Wei, C.; Wang, X.; Hui, M.; Zeng, Z. Quasi-synchronization of fractional multiweighted coupled neural networks via aperiodic intermittent control. IEEE Trans. Cybern. 2024, 54, 1671–1684. [Google Scholar] [CrossRef] [PubMed]
- Kao, Y.; Wang, C.; Xia, H.; Cao, Y. Projective synchronization for uncertain fractional reaction-diffusion systems via adaptive sliding mode control based on finite-time scheme. In Analysis and Control for Fractional-Order Systems; Springer: Berlin/Heidelberg, Germany, 2024; pp. 141–163. [Google Scholar]
- Li, H.L.; Cao, J.; Hu, C.; Jiang, H.; Alsaadi, F.E. Synchronization analysis of discrete-time fractional-order quaternion-valued uncertain neural networks. IEEE Trans. Neural Netw. Learn. Syst. 2024, 35, 14178–14189. [Google Scholar] [CrossRef] [PubMed]
- Zhang, R.; Qiu, K.; Liu, C.; Ma, H.; Chu, Z. Comparison principle based synchronization analysis of fractional-order chaotic neural networks with multi-order and its circuit implementation. Fractal Fract. 2025, 9, 273. [Google Scholar] [CrossRef]
- Yan, W.; Jiang, Z.; Huang, X.; Ding, Q. Adaptive neural network synchronization control for uncertain fractional-order time-delay chaotic systems. Fractal Fract. 2023, 7, 288. [Google Scholar] [CrossRef]
- Maharajan, C.; Sowmiya, C.; Xu, C. Lagrange stability of inertial type neural networks: A Lyapunov-Krasovskii functional approach. Evol. Syst. 2025, 16, 63. [Google Scholar] [CrossRef]
- Ullah, A.; Ullah, A.; Ahmad, S.; Van Hoa, N. Fuzzy Yang transform for second order fuzzy differential equations of integer and fractional order. Phys. Scr. 2023, 98, 044003. [Google Scholar] [CrossRef]
- Babcock, K.; Westervelt, R. Stability and dynamics of simple electronic neural networks with added inertia. Phys. D Nonlinear Phenom. 1986, 23, 464–469. [Google Scholar] [CrossRef]
- Liu, X.; He, H.; Cao, J. Event-triggered bipartite synchronization of delayed inertial memristive neural networks with unknown disturbances. IEEE Trans. Control Netw. Syst. 2024, 11, 1408–1419. [Google Scholar] [CrossRef]
- Zhang, Z.; Wang, S.; Wang, X.; Wang, Z.; Lin, C. Event-triggered synchronization for delayed quaternion-valued inertial fuzzy neural networks via nonreduced order approach. IEEE Trans. Fuzzy Syst. 2023, 31, 3000–3014. [Google Scholar] [CrossRef]
- Li, L.; Cui, Q.; Cao, J.; Qiu, J.; Sun, Y. Exponential synchronization of coupled inertial neural networks with hybrid delays and stochastic impulses. IEEE Trans. Neural Netw. Learn. Syst. 2024, 535, 15402–15414. [Google Scholar] [CrossRef] [PubMed]
- Cheng, Y.; Zhang, H.; Zhang, W.; Zhang, H. Novel algebraic criteria on global Mittag–Leffler synchronization for FOINNs with the Caputo derivative and delay. J. Appl. Math. Comput. 2022, 68, 3527–3544. [Google Scholar] [CrossRef]
- Luo, L.; Li, L.; Huang, W.; Cui, Q. Stability of the Caputo fractional-order inertial neural network with delay-dependent impulses. Neurocomputing 2023, 520, 25–32. [Google Scholar] [CrossRef]
- Li, Z.; Zhang, Y. The boundedness and the global mittag-leffler synchronization of fractional-order inertial Cohen–Grossberg neural networks with time delays. Neural Process. Lett. 2022, 54, 597–611. [Google Scholar] [CrossRef]
- Ullah, A.; Ullah, A.; Ahmad, S.; Ahmad, I.; Akgül, A. On solutions of fuzzy fractional order complex population dynamical model. Numer. Methods Partial Differ. Equ. 2023, 39, 4595–4615. [Google Scholar] [CrossRef]
- Wan, P.; Zeng, Z. Stability and stabilization of Takagi–Sugeno fuzzy second-fractional-order linear networks via nonreduced-order approach. IEEE Trans. Syst. Man Cybern. Syst. 2022, 52, 6524–6533. [Google Scholar] [CrossRef]
- Peng, Q.; Jian, J. Asymptotic synchronization of second-fractional-order fuzzy neural networks with impulsive effects. Chaos Solitons Fractals 2023, 168, 113150. [Google Scholar] [CrossRef]
- Cui, Q.; Xu, C.; Xu, Y.; Ou, W.; Pang, Y.; Liu, Z.; Shen, J.; Baber, M.Z.; Maharajan, C.; Ghosh, U. Bifurcation and Controller design of 5D BAM neural networks with time delay. Int. J. Numer. Model. Electron. Netw. Devices Fields 2024, 37, e3316. [Google Scholar] [CrossRef]
- Maharajan, C.; Sowmiya, C.; Xu, C. Delay dependent complex-valued bidirectional associative memory neural networks with stochastic and impulsive effects: An exponential stability approach. Kybernetika 2024, 60, 317–356. [Google Scholar] [CrossRef]
- Hao, R.; Yang, Y.; Liu, F.; Zhou, B. Stability and bipartite synchronization of fractional-order coupled reaction–diffusion neural networks under unbalanced graph. Chaos Solitons Fractals 2024, 189, 115583. [Google Scholar] [CrossRef]
- Ma, L.; Tang, D. Dynamical behavior of a three-species diffusion-advection predator-prey-mutualist model in heterogeneous environments. J. Differ. Equ. 2025, 424, 330–380. [Google Scholar] [CrossRef]
- Jiao, X.; Liu, L.; Yu, X. Rich dynamics of a reaction–diffusion Filippov Leslie–Gower predator–prey model with time delay and discontinuous harvesting. Math. Comput. Simul. 2025, 228, 339–361. [Google Scholar] [CrossRef]
- Xu, Y.; Jiang, Z.; Xie, X.; Li, W.; Wu, Y. Fuzzy-based bipartite quasi-synchronization of fractional-order heterogeneous reaction-diffusion neural networks via intermittent control. IEEE Trans. Circuits Syst. I Regul. Pap. 2024, 71, 3880–3890. [Google Scholar] [CrossRef]
- Wang, J.L. Passivity for multiadaptive coupled fractional-order reaction-diffusion neural networks. In Dynamical Behaviors of Fractional-Order Complex Dynamical Networks; Springer: Berlin/Heidelberg, Germany, 2024; pp. 141–168. [Google Scholar]
- Wang, H.; Gu, Y.; Zhang, X.; Yu, Y. Stability and synchronization of fractional-order reaction–diffusion inertial time-delayed neural networks with parameters perturbation. Neural Netw. 2024, 179, 106564. [Google Scholar] [CrossRef]
- Langlands, T.; Henry, B.; Wearne, S. Fractional cable equation models for anomalous electrodiffusion in nerve cells: Infinite domain solutions. J. Math. Biol. 2011, 59, 761–808. [Google Scholar] [CrossRef]
- Tzou, D.Y. A unified field approach for heat conduction from macro-to micro-scales. J. Heat Transf. 1995, 117, 8–16. [Google Scholar] [CrossRef]
- Greenberg, J.M.; Tsien, L.T. The effect of boundary damping for the quasilinear wave equation. J. Differ. Equ. 1984, 52, 66–75. [Google Scholar] [CrossRef]
- Shi, T.; Hu, C.; Yu, J.; Zhu, Q.; Huang, T. Internal/Boundary control-based fixed-time synchronization for spatiotemporal networks. IEEE Trans. Cybern. 2024, 54, 6693–6706. [Google Scholar] [CrossRef]
- Liu, X.Z.; Wu, K.N.; Ahn, C.K. Intermittent boundary control for synchronization of fractional delay neural networks with diffusion terms. IEEE Trans. Syst. Man Cybern. Syst. 2023, 53, 2900–2912. [Google Scholar] [CrossRef]
- Sun, Y.; Hu, C.; Yu, J.; Shi, T. Synchronization of fractional-order reaction-diffusion neural networks via mixed boundary control. Appl. Math. Comput. 2024, 450, 127982. [Google Scholar] [CrossRef]
- Wang, Z.P.; Zhang, X.; Qiao, J.F.; Wu, H.N.; Huang, T. Synchronization of reaction-diffusion neural networks with random time-varying delay via intermittent boundary control. Neurocomputing 2023, 556, 126645. [Google Scholar] [CrossRef]
- Podlubny, I. Fractional Differential Equations: An Introduction to Fractional Derivatives, Fractional Differential Equations, to Methods of Their Solution and Some of Their Applications; Elsevier: Amsterdam, The Netherlands, 1999; Volume 198. [Google Scholar]
- Miller, K.S.; Ross, B. An Introduction to the Fractional Calculus and Fractional Differential Equations; Wiley: Hoboken, NJ, USA, 1993. [Google Scholar]
- Yang, T.; Yang, L.B. The global stability of fuzzy cellular neural network. IEEE Trans. Circuits Syst. I Fundam. Theory Appl. 1996, 43, 880–883. [Google Scholar] [CrossRef]
- Chen, J.; Zeng, Z.; Jiang, P. Global Mittag-Leffler stability and synchronization of memristor-based fractional-order neural networks. Neural Netw. 2014, 51, 1–8. [Google Scholar] [CrossRef] [PubMed]
- Wang, Z.; Zhang, W.; Zhang, H.; Chen, D.; Cao, J.; Abdel-Aty, M. Finite-time quasi-projective synchronization of fractional-order reaction-diffusion delayed neural networks. Inf. Sci. 2025, 686, 121365. [Google Scholar] [CrossRef]
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hu, L.; Jiang, H.; Hu, C.; Ren, Y.; Liu, L.; Qin, X. Global Mittag-Leffler Synchronization of Fractional-Order Fuzzy Inertia Neural Networks with Reaction–Diffusion Terms Under Boundary Control. Fractal Fract. 2025, 9, 405. https://doi.org/10.3390/fractalfract9070405
Hu L, Jiang H, Hu C, Ren Y, Liu L, Qin X. Global Mittag-Leffler Synchronization of Fractional-Order Fuzzy Inertia Neural Networks with Reaction–Diffusion Terms Under Boundary Control. Fractal and Fractional. 2025; 9(7):405. https://doi.org/10.3390/fractalfract9070405
Chicago/Turabian StyleHu, Lianyang, Haijun Jiang, Cheng Hu, Yue Ren, Lvming Liu, and Xuejiao Qin. 2025. "Global Mittag-Leffler Synchronization of Fractional-Order Fuzzy Inertia Neural Networks with Reaction–Diffusion Terms Under Boundary Control" Fractal and Fractional 9, no. 7: 405. https://doi.org/10.3390/fractalfract9070405
APA StyleHu, L., Jiang, H., Hu, C., Ren, Y., Liu, L., & Qin, X. (2025). Global Mittag-Leffler Synchronization of Fractional-Order Fuzzy Inertia Neural Networks with Reaction–Diffusion Terms Under Boundary Control. Fractal and Fractional, 9(7), 405. https://doi.org/10.3390/fractalfract9070405