
A Model-Free Fractional-Order Composite Control Strategy for High-Precision Positioning of Permanent Magnet Synchronous Motor

Abstract
1. Introduction
- The paper presents a distinctive model-free fractional-order composite control approach, meticulously crafted for the positioning of PMSM drives. This approach harmoniously combines the strengths of fractional-order calculus and model-free control strategies, aiming to propel the performance of PMSM drives to unprecedented levels.
- The cornerstone of the proposed control method is a novel fractional-order double differential sliding mode surface. This surface ensures remarkable robustness, exceptional adaptability, and swift convergence, while effectively mitigating singularity issues. Additionally, a CESO has been meticulously designed to accurately estimate both internal and external disturbances impacting the PMSM drives, thereby significantly bolstering the system’s overall performance and stability.
- The paper conducts a stability analysis of the proposed control system utilizing Lyapunov stability theory, confirming the convergence stability of the closed-loop system. Furthermore, comparisons with prevailing control methods are presented to highlight the effectiveness and superiority of the introduced model-free sliding mode composite control approach for PMSM drives.
- The simulation results have unequivocally verified the efficacy and superiority of our proposed control scheme when benchmarked against existing theories.
2. Modeling and Preliminaries
3. Control Strategies and Stability Analysis
3.1. Differential Sliding Mode Controller
3.2. Double Fractional-Order Differential Sliding Mode Controller
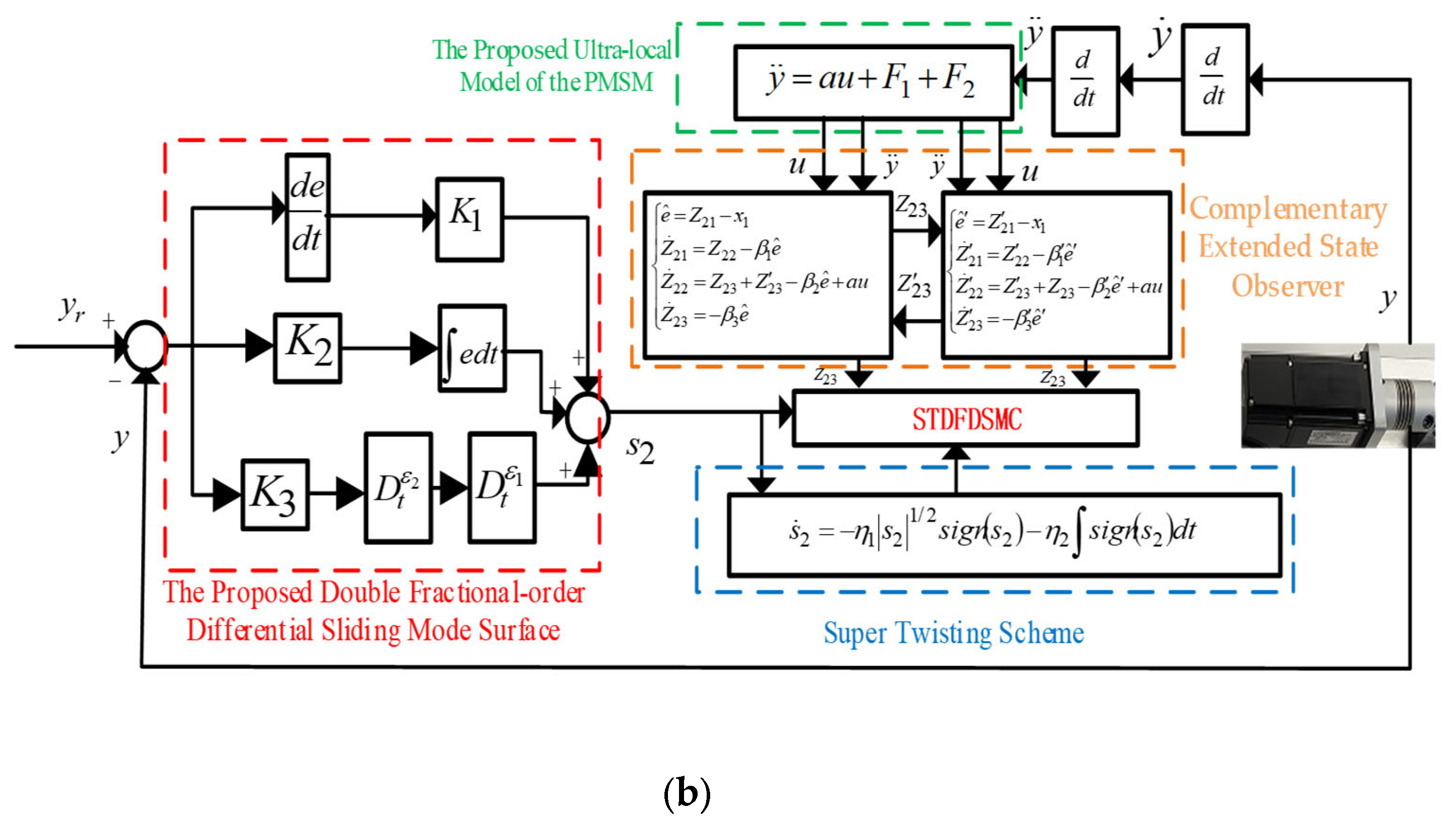
3.3. Super Twisting Double Fractional-Order Differential Sliding Mode Controller with the Complementary Extended State Observer
4. Comparative Results
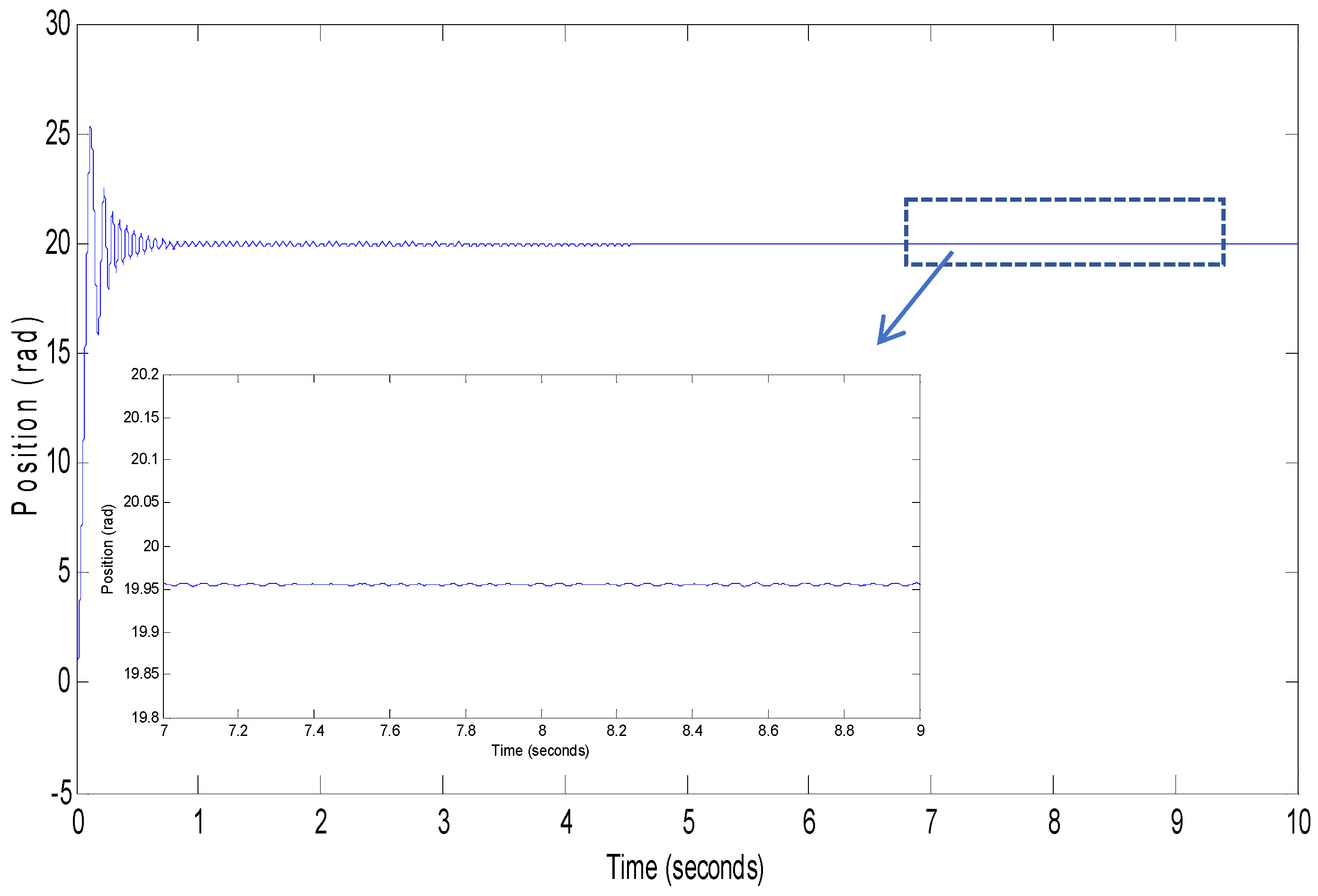
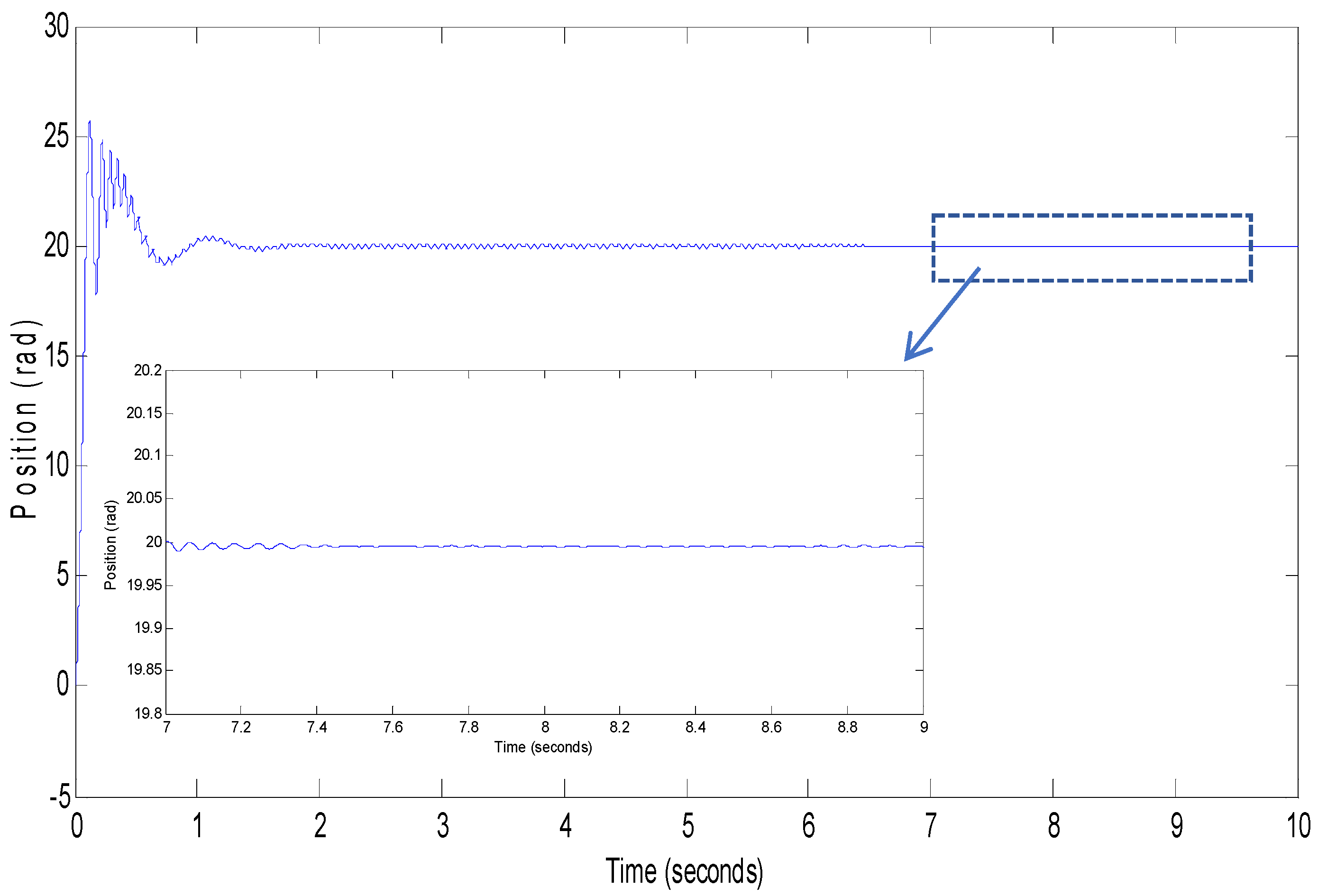
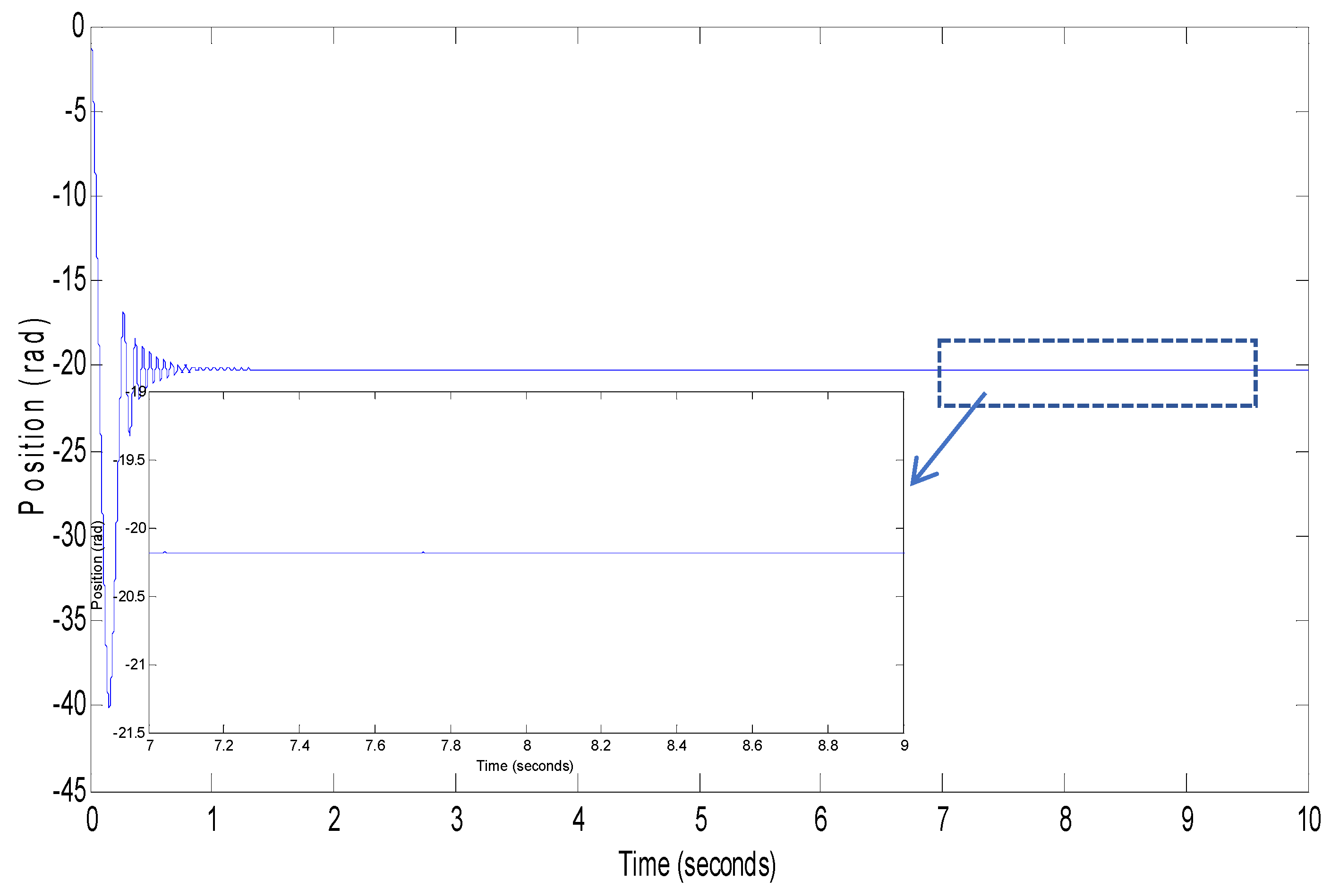
- Case I: Comparison of steady-state responses for motor positions.
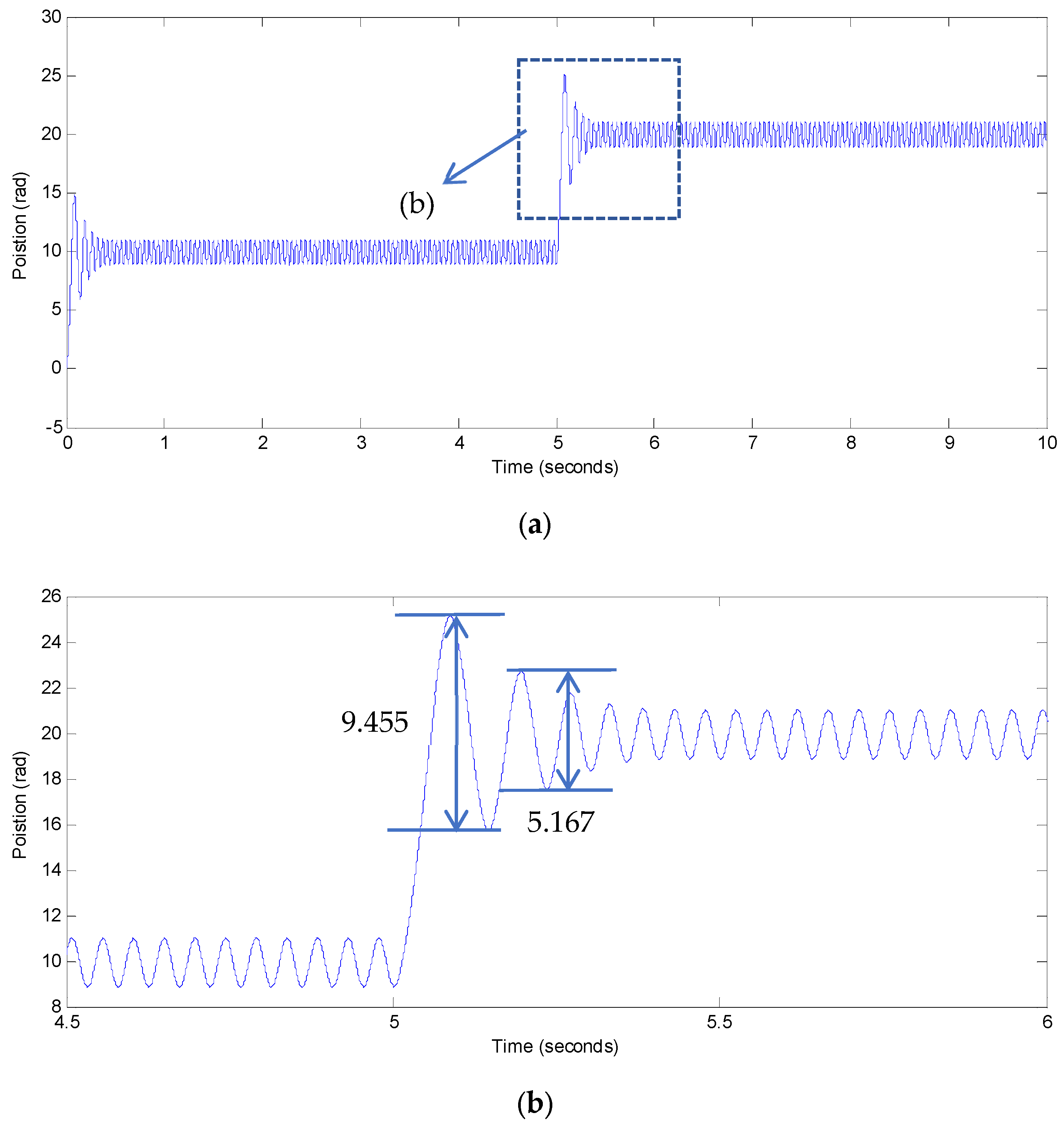
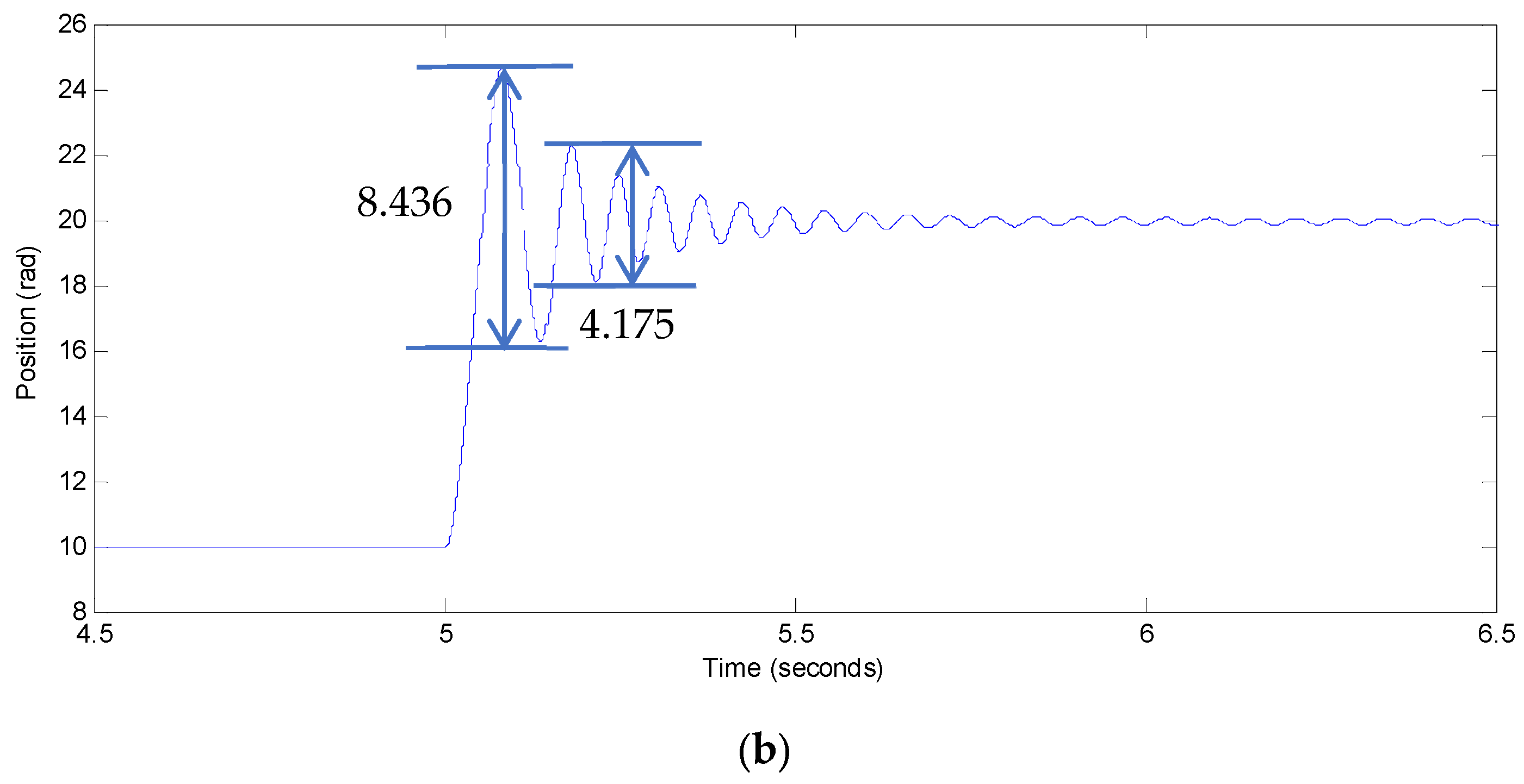
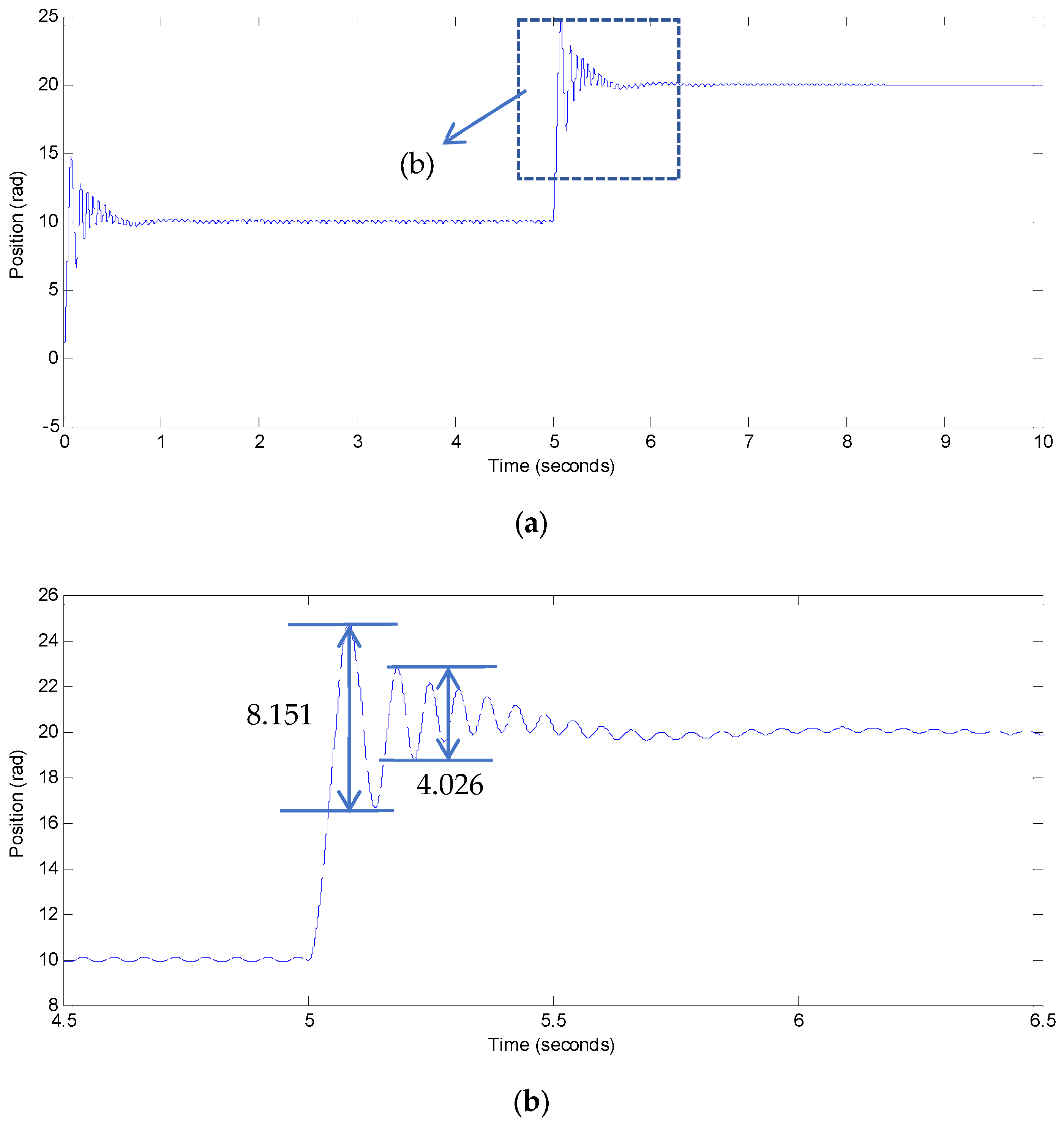
- Case II: Comparison of dynamic responses for motor positions.
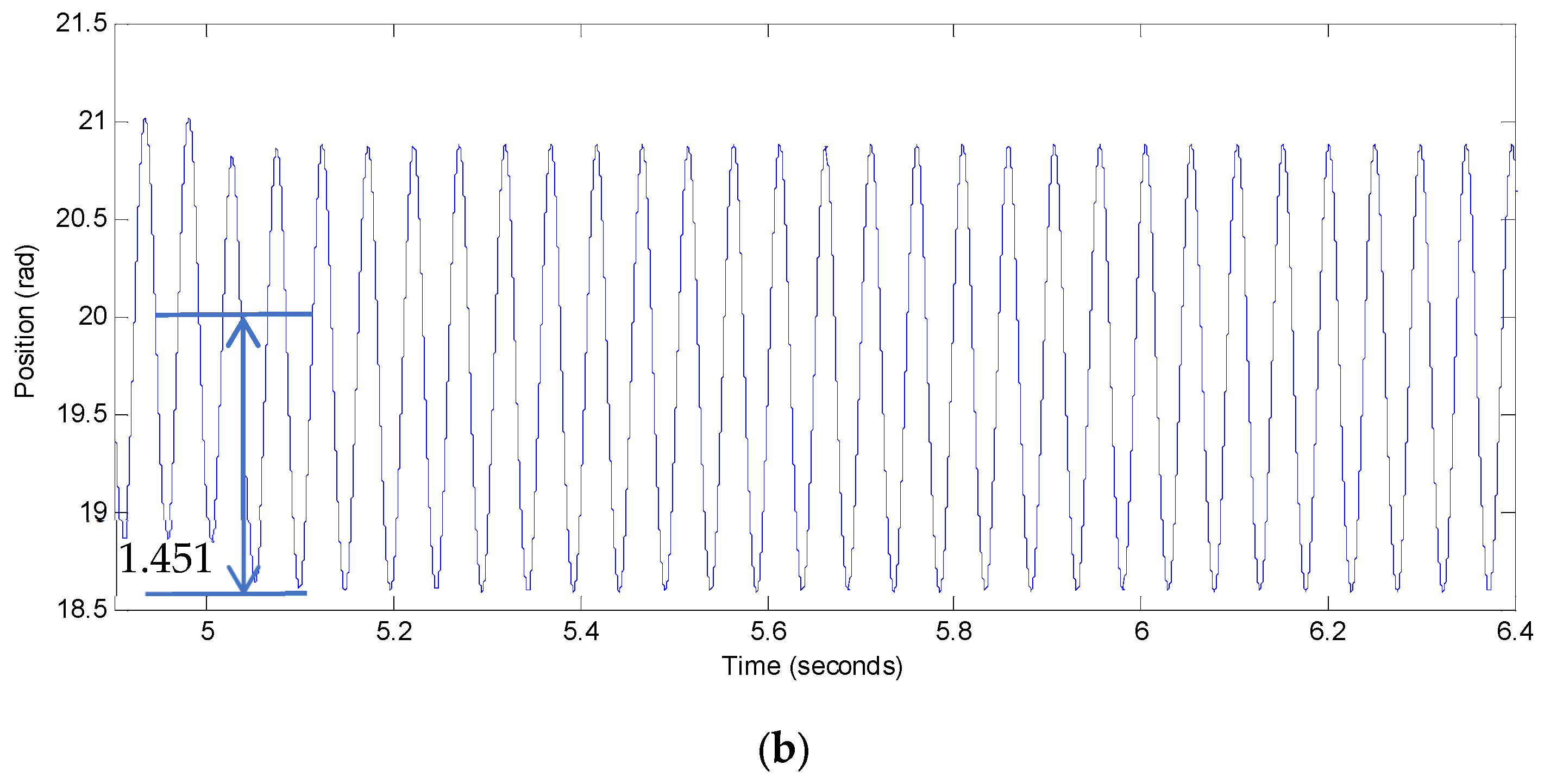
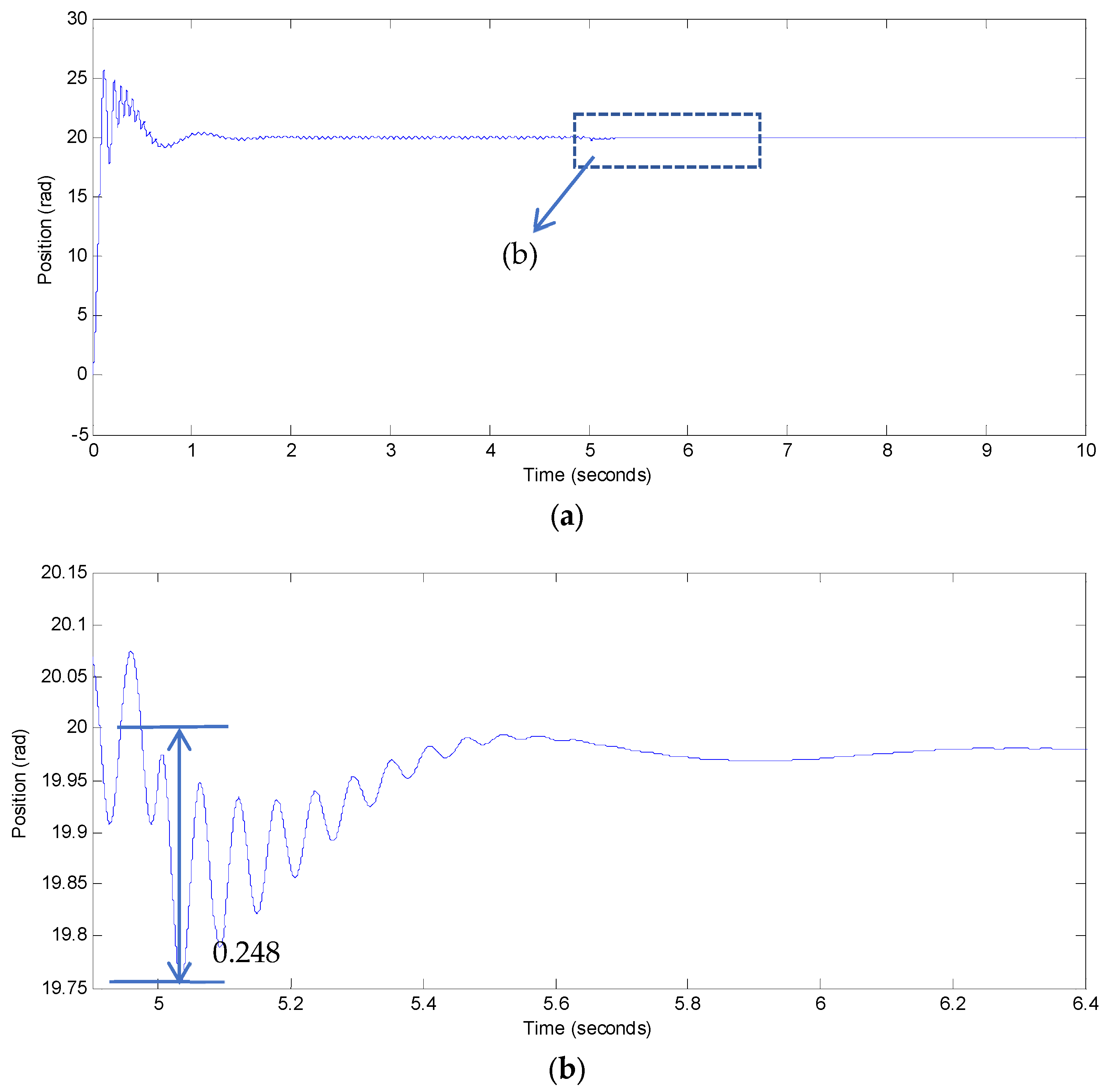
- Case III: comparing resistance to external disturbances.
5. Conclusions and Future Work
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Tian, M.; Wang, T.; Yu, Y.; Dong, Q.; Wang, B.; Xue, D. Integrated observer-based terminal sliding-mode speed controller for PMSM drives considering multi-source disturbances. IEEE Trans. Power Electron. 2024, 39, 7968–7979. [Google Scholar] [CrossRef]
- Liu, X.; Deng, Y.; Liu, J.; Cao, H.; Xu, C.; Liu, Y. Fixed-time integral terminal sliding mode control with an adaptive RBF neural network for PMSM speed regulation. Control Eng. Pract. 2025, 156, 106236. [Google Scholar] [CrossRef]
- Pang, J.; Zhang, J.; Li, M.; Li, S. Time-varying command filters-based neural adaptive control with fixed-time prescribed performance for the PMSM with external disturbance and time delays. J. Franklin Inst. 2025, 362, 107527. [Google Scholar] [CrossRef]
- Jia, Z.; Song, W.; Ma, C.; Lu, T.; Huang, W. A generalized current residual-based diagnosis and classification method for interturn fault and high-resistance connection fault in model predictive controlled PMSMs. IEEE Trans. Power Electron. 2025, 40, 7239–7250. [Google Scholar] [CrossRef]
- Gao, P.; Zhang, G.; Ouyang, H.; Mei, L. An adaptive super twisting nonlinear fractional-order PID sliding mode control of permanent magnet synchronous motor speed regulation system based on extended state observer. IEEE Access 2020, 8, 53498–53510. [Google Scholar] [CrossRef]
- Gao, P.; Fang, L.; Pan, H. Complementary extended state observer-based model-free sliding mode control for a PMSM in cathode copper production. Electron. Lett. 2024, 60, e70044. [Google Scholar] [CrossRef]
- Tang, B.; Lu, W.; Yan, B.; Lu, K.; Feng, J.; Guo, L. A novel position speed integrated sliding mode variable structure controller for position control of PMSM. IEEE Trans. Ind. Electron. 2021, 69, 12621–12631. [Google Scholar] [CrossRef]
- Ruan, G.; Su, Y.; Cao, J.; Su, Y.; Gong, Z.; Hu, X. Position tracking control of permanent magnet synchronous motor based on AHONFTSMC control. J. Electr. Eng. Technol. 2024, 20, 389–401. [Google Scholar] [CrossRef]
- Zhang, W.; Cao, B.; Nan, N.; Li, M.; Chen, Y. An adaptive PID-type sliding mode learning compensation of torque ripple in PMSM position servo systems towards energy efficiency. ISA Trans. 2021, 110, 258–270. [Google Scholar] [CrossRef]
- Hu, J.; He, C.; Li, Y. A novel predictive position control with current and speed limits for PMSM drives based on weighting factors elimination. IEEE Trans. Ind. Electron. 2022, 69, 12458–12468. [Google Scholar] [CrossRef]
- Xu, X.; Lu, S.; Jiang, Y.; Liu, J.; Zhang, L. Driving strategy of unmanned ground vehicle under split-docking road conditions based on improved EKF and PID-modified SMC. Adv. Eng. Inform. 2024, 62, 102830. [Google Scholar] [CrossRef]
- Xiao, H.; Zhen, Z.; Xue, Y. Fault-tolerant attitude tracking control for carrier-based aircraft using RBFNN-based adaptive second-order sliding mode control. Aerosp. Sci. Technol. 2023, 139, 108408. [Google Scholar] [CrossRef]
- Abdelaal, A.K.; Shaheen, A.M.; El-Fergany, A.A.; Alqahtani, M.H. Sliding mode control based dynamic voltage restorer for voltage sag compensation. Results Eng. 2024, 24, 102936.2. [Google Scholar] [CrossRef]
- Shevidi, A.; Hashim, H.A. Quaternion-based adaptive backstepping fast terminal sliding mode control for quadrotor UAVs with finite time convergence. Results Eng. 2024, 23, 102497. [Google Scholar] [CrossRef]
- Truong, T.N.; Vo, A.T.; Kang, H. A model-free terminal sliding mode control for robots: Achieving fixed-time prescribed performance and convergence. ISA Trans. 2024, 144, 330–341. [Google Scholar] [CrossRef]
- Safari, A.; Sorouri, H.; Oshnoei, A. The regulation of superconducting magnetic energy storages with a neural-tuned fractional order PID controller based on brain emotional learning. Fractal Fract. 2024, 8, 365. [Google Scholar] [CrossRef]
- Shiryayeva, O.; Suleimenov, B.; Kulakova, Y. Optimal design of I-PD and PI-D industrial controllers based on artificial intelligence algorithm. Algorithms 2024, 17, 288. [Google Scholar] [CrossRef]
- Sahin, A.K.; Cavdar, B.; Ayas, M.S. An adaptive fractional controller design for automatic voltage regulator system: Sigmoid-based fractional-order PID controller. Neural Comput. Appl. 2024, 36, 14409–14431. [Google Scholar] [CrossRef]
- Tumari, M.Z.M.; Ahmad, M.A.; Suid, M.H.; Ghazali, M.R.; Tokhi, M.O. An improved marine predators algorithm tuned data-driven multiple-node hormone regulation neuroendocrine-PID controller for multi-input–multi-output gantry crane system. J. Low Freq. Noise Vib. Act. Control 2023, 42, 1666–1698. [Google Scholar] [CrossRef]
- Elgezouli, D.E.; Eltayeb, H.; Abdoon, M.A. Novel GPID: Grünwald–Letnikov fractional PID for enhanced adaptive cruise control. Fractal Fract. 2024, 8, 751. [Google Scholar] [CrossRef]
- Wang, Y.; Lu, X.; Gao, Y.; Chen, Y. An anti-swing control method combining deep learning prediction models with a multistate fractional-order terminal sliding mode controller for wave motion compensation devices. Mech. Syst. Signal Process. 2025, 223, 111819. [Google Scholar] [CrossRef]
- Singh, A.P.; Bingi, K. Applications of fractional-order calculus in robotics. Fractal Fract. 2024, 8, 403. [Google Scholar] [CrossRef]
- Gao, P.; Fang, L.; Pan, H. Interdisciplinary education promotes scientific research innovation: Take the composite control of the permanent magnet synchronous motor as an example. Mathematics 2024, 12, 2602. [Google Scholar] [CrossRef]
- Mseddi, A.; Abid, A.; Naifar, O.; Rhaima, M.; Makhlouf, A.B.; Mchiri, L. Investigation of the robust fractional order control approach associated with the online analytic unity magnitude shaper: The case of wind energy systems. Fractal Fract. 2024, 8, 187. [Google Scholar] [CrossRef]
- Tumari, M.Z.M.; Ahmad, M.A.; Rashid, M.I.M. A fractional order PID tuning tool for automatic voltage regulator using marine predators algorithm. Energy Rep. 2023, 9, 416–421. [Google Scholar] [CrossRef]
- Sharma, R.; Rana, K.P.S.; Kumar, V. Performance analysis of fractional order fuzzy PID controllers applied to a robotic manipulator. Expert Syst. Appl. 2014, 41, 4274–4289. [Google Scholar] [CrossRef]
- Li, H.; Cao, J.; Hu, C.; Jiang, H.; Alsaedi, A. Synchronization analysis of nabla fractional-order fuzzy neural networks with time delays via nonlinear feedback control. Fuzzy Sets Syst. 2024, 475, 108750. [Google Scholar] [CrossRef]
- Hua, X.; Wong, P.K.; Zhao, J.; Xie, Z. Adaptive fractional-order nonsingular terminal sliding mode control and sequential quadratic programming torque distribution for lateral stability of FWID-EVs with actuator constraints. ISA Trans. 2024, 150, 208–222. [Google Scholar] [CrossRef]
- Pan, J. Fractional-order sliding mode control of manipulator combined with disturbance and state observer. Robot. Auton. Syst. 2025, 183, 104840. [Google Scholar] [CrossRef]
- Sheng, Y.; Gan, J.; Guo, X. Predefined-time fractional-order time-varying sliding mode control for arbitrary order systems with uncertain disturbances. ISA Trans. 2024, 146, 236–248. [Google Scholar] [CrossRef]
- Li, S.; Lu, H.; Li, J.; Zheng, T.; He, Y. Fractional-order sliding mode controller based on ESO for a buck converter with mismatched disturbances: Design and experiments. IEEE Trans. Ind. Electron. 2025; in press. [Google Scholar]
- Memarzade, S.; Zarif, M.H.; Alfi, A. Observer-based fractional-order dynamic terminal sliding mode control of active shock absorbing prostheses for lower limb amputees. ISA Trans. 2025; in press. [Google Scholar]
- Zhang, Z.; Zhang, H. Fractional-order sliding mode with active disturbance rejection control for UAVs. Appl. Sci. 2025, 15, 556. [Google Scholar] [CrossRef]
- Ullah, S.; Alsafran, A.; Harrison, A.; Hafeez, G.; Hassan, A.; Alghamdi, B.; Kraiem, H. A uniform robust exact differentiator based neuro-fuzzy fractional order sliding mode control for optimal standalone solar photovoltaic system. IEEE Access 2025, 13, 4411–4423. [Google Scholar] [CrossRef]
- Xu, Y.; Kang, S.; Li, T.; Liu, G. Finite-time fractional-order sliding mode force control with time delay estimation and RBFNN compensation: Design and application to cell microinjection. J. Franklin Inst. 2025, 362, 107470. [Google Scholar] [CrossRef]
- Han, J. From PID to active disturbance rejection control. IEEE Trans. Ind. Electron. 2009, 56, 900–906. [Google Scholar] [CrossRef]
- Wang, S.; Gan, H.; Luo, Y.; Wang, X.; Gao, Z. Active disturbance rejection control with fractional-order model-aided extended state observer. ISA Trans. 2023, 142, 527–537. [Google Scholar] [CrossRef]
- Sun, X.; Lin, X.; Guo, D.; Lei, G.; Yao, M. Improved deadbeat predictive current control with extended state observer for dual three-phase PMSMs. IEEE Trans. Power Electron. 2024, 39, 6769–6782. [Google Scholar] [CrossRef]
- Ran, M.; Li, J.; Xie, L. A new extended state observer for uncertain nonlinear systems. Automatica 2021, 131, 109772. [Google Scholar] [CrossRef]
- Hua, X.; Huang, D.; Guo, S. Extended state observer based on ADRC of linear system with incipient fault. Int. J. Control Autom. Syst. 2020, 18, 1425–1434. [Google Scholar] [CrossRef]
- Lyu, S.; Lang, X.; Wang, D. Koopman-based robust learning control with extended state observer. IEEE Robot. Autom. Lett. 2025, 10, 2303–2310. [Google Scholar] [CrossRef]
- Li, Y.; Hu, Y.; Wu, W. Complex-coefficient adaptive extended state observer for position estimation of PMSMs with enhanced robustness to disturbances. IEEE J. Emerg. Sel. Top. Power Electron. 2025; in press. [Google Scholar]
- Chen, Y.; Zhang, J.; Zhang, L. Fixed-time sliding mode trajectory tracking control for uncertain robotic manipulators using high-order extended state observer. Trans. Inst. Meas. Control, 2025; in press. [Google Scholar]
- Zhao, J.; Wang, G.; Zhang, G.; Hao, Y.; Zhao, N.; Hu, Z.; Zhu, L.; Xu, D. Extended flux projection vector observer based position error compensation strategy for sensorless direct torque controlled PMSM drives. IEEE Trans. Power Electron. 2025; in press. [Google Scholar]
- Hong, J.; Lin, X.; Zhang, J.; Xu, Y.; Yan, B.; Li, X. A state feedback control with compensation for permanent magnet synchronous machine drives. ISA Trans. 2024, 150, 232–242. [Google Scholar] [CrossRef]
- Wang, L.; Liu, G.; Xu, C. An improved nonlinear active disturbance rejection controller via sine function and whale optimization algorithm for permanent magnet synchronous motors speed control. IEEJ Trans. Electr. Electron. Eng. 2024; in press. [Google Scholar]
- Guan, W.; Cheng, Y.; Luo, G.; Dou, M. Research on non-linear active disturbance rejection speed synchronisation control of aviation dual motor actuator considering current saturation constraints. IET Electr. Power Appl. 2024, 18, 1796–1806. [Google Scholar] [CrossRef]
- Guo, Z.; Li, J.; Yan, M.; Wang, G. Composite speed control based on an improved gain-adaptive super-twisting sliding mode observer for a permanent magnet synchronous motor. Control Eng. Pract. 2025, 157, 106241. [Google Scholar] [CrossRef]
- Zhao, K.; Liu, W.; Zhou, R.; Dai, W.; Wu, S.; Qiu, P.; Yin, Y.; Jia, N.; Yi, J.; Huang, G. Model-free fast integral terminal sliding-mode control method based on improved fast terminal sliding-mode observer for PMSM with unknown disturbances. ISA Trans. 2023, 143, 572–581. [Google Scholar] [CrossRef]
- Hou, Q.; Ding, S.; Yu, X.; Mei, K. A super-twisting-like fractional controller for SPMSM drive system. IEEE Trans. Ind. Electron. 2021, 69, 9376–9384. [Google Scholar] [CrossRef]
- Li, S.; Zhou, M.; Yu, X. Design and implementation of terminal sliding mode control method for PMSM speed regulation system. IEEE Trans. Ind. Inform. 2012, 9, 1879–1891. [Google Scholar] [CrossRef]
- Zheng, C.; Zhang, J. Finite-time nonlinear disturbance observer based discretized integral sliding mode control for PMSM drives. J. Power Electron. 2018, 18, 1075–1085. [Google Scholar]
- Zhang, Z.; Liu, X.; Yu, J.; Yu, H. Time-varying disturbance observer based improved sliding mode single-loop control of PMSM drives with a hybrid reaching law. IEEE Trans. Energy Convers. 2023, 38, 2539–2549. [Google Scholar] [CrossRef]
- Li, C.; Deng, W. Remarks on fractional derivatives. Appl. Math. Comput. 2007, 187, 777–784. [Google Scholar] [CrossRef]
- Qian, D.; Li, C.; Agarwal, R.P.; Wong, P.J.Y. Stability analysis of fractional differential system with Riemann-Liouville derivative. Math. Comput. Modell. 2010, 52, 862–874. [Google Scholar] [CrossRef]
- Li, W.; Yuan, H.; Li, S.; Zhu, J. A revisit to model-free control. IEEE Trans. Power Electron. 2022, 37, 14408–14421. [Google Scholar] [CrossRef]
- Fliess, M.; Join, C. Model-free control. Int. J. Control 2013, 86, 2228–2252. [Google Scholar] [CrossRef]
- Fliess, M.; Cédric, J. Intelligent PID controllers. In Proceedings of the 2008 16th Mediterranean Conference on Control and Automation, Ajaccio, France, 25–27 June 2008. [Google Scholar]
- El-Sousy, F.F.M. Optimal adaptive ultra-local model-free control based on extended state observer for PMSM driven single-axis servo mechanism system. IEEE Trans. Ind. App. 2024, 60, 7728–7745. [Google Scholar] [CrossRef]
- Zhao, L.; Dai, L.; Xia, Y.; Li, P. Attitude control for quadrotors subjected to wind disturbances via active disturbance rejection control and integral sliding mode control. Mech. Syst. Signal Process. 2019, 129, 531–545. [Google Scholar] [CrossRef]
- Khan, R.F.A.; Rsetam, K.; Cao, Z.; Man, Z. Singular perturbation-based adaptive integral sliding mode control for flexible joint robots. IEEE Trans. Ind. Electron. 2022, 70, 10516–10525. [Google Scholar] [CrossRef]
- Moreno, J.A.; Osorio, M. Strict Lyapunov functions for the super-twisting algorithm. IEEE Trans. Autom. Control 2012, 57, 1035–1040. [Google Scholar] [CrossRef]
- Wang, H.; Chen, X.; Zhao, X.; Dan, H.; Su, M.; Sun, Y. A cascade PI-SMC method for matrix converter-fed BDFIM drives. IEEE Trans. Transp. Electrific. 2021, 7, 2541–2550. [Google Scholar] [CrossRef]
- Gao, P.; Zhang, G.; Lv, X. Model-free control using improved smoothing extended state observer and super-twisting nonlinear sliding mode control for PMSM drives. Energies 2021, 14, 922. [Google Scholar] [CrossRef]
- Gu, J.; You, S.; Kim, W.; Moon, J. Fuzzy event-triggered super twisting sliding mode control for position tracking of permanent magnet synchronous motors under unknown disturbances. IEEE Trans. Ind. Inform. 2023, 19, 9843–9854. [Google Scholar] [CrossRef]
- Gao, P.; Pan, H. Model-free double fractional-order integral sliding mode control for permanent magnet synchronous motor based electric mopeds drive system. IEICE Electron. Express 2023, 20, 20230178. [Google Scholar] [CrossRef]
- Li, H.; Yang, S.; Kong, L.; Wen, T. High-precision angular speed tracking control of gimbal system with harmonic reducer. IEEE Trans. Ind. Electron. 2021, 69, 8168–8177. [Google Scholar] [CrossRef]
- Jung, T.-U.; Jang, J.-H.; Park, C.-S. A back-EMF estimation error compensation method for accurate rotor position estimation of surface mounted permanent magnet synchronous motors. Energies 2017, 10, 1160. [Google Scholar] [CrossRef]
- Li, H.; Song, B.; Chen, T.; Xie, Y.; Zhou, X. Adaptive fuzzy PI controller for permanent magnet synchronous motor drive based on predictive functional control. J. Franklin Inst. 2021, 358, 7333–7364. [Google Scholar] [CrossRef]
- Liu, G.; Fang, L.; Liu, Z.; Chen, Q.; Zhang, J. Active disturbance rejection control of a magnetic screw motor for high tracking performance. IEEE Trans. Power Electron. 2022, 37, 9641–9651. [Google Scholar] [CrossRef]
- Xu, D.; Yao, H.; He, Y.; Zhao, W. Current loop disturbance suppression for dual three phase permanent magnet synchronous generators based on modified linear active disturbance rejection control. Chin. J. Electr. Eng. 2023, 10, 101–113. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Control Strategies | Issue | ||
|---|---|---|---|
| Dynamic Response | Steady-State Response | Robustness | |
| The other control scheme (Like differential SMC, double fractional-order differential SMC) | Less effective | Less effective | Less effective |
| STDFDSMC | Better | Better | Better |
| Control Strategies | ISE | |
|---|---|---|
| 20 Rad | −20 Rad | |
| Differential SMC | 1.7595 | 2.2366 |
| Double fractional-order differential SMC | 0.0231 | 0.0992 |
| STDFDSMC | 0.0013 | 0.0076 |
| Control Strategies | Rise Time (s) | First Fluctuation Value of the Positional Response (Rad) | Second Fluctuation Value of the Positional Response (Rad) |
|---|---|---|---|
| Differential SMC | 0.052 | 9.455 | 5.167 |
| Double fractional-order differential SMC | 0.047 | 8.436 | 4.175 |
| STDFDSMC | 0.045 | 8.151 | 4.026 |
| Control Strategies | Overshoot Value of Position When the External Load Sudden Increase (Rad) |
|---|---|
| Differential SMC | 1.451 |
| Double fractional-order differential SMC | 0.321 |
| STDFDSMC | 0.248 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gao, P.; Zhao, C.; Pan, H.; Fang, L. A Model-Free Fractional-Order Composite Control Strategy for High-Precision Positioning of Permanent Magnet Synchronous Motor. Fractal Fract. 2025, 9, 161. https://doi.org/10.3390/fractalfract9030161
Gao P, Zhao C, Pan H, Fang L. A Model-Free Fractional-Order Composite Control Strategy for High-Precision Positioning of Permanent Magnet Synchronous Motor. Fractal and Fractional. 2025; 9(3):161. https://doi.org/10.3390/fractalfract9030161
Chicago/Turabian StyleGao, Peng, Chencheng Zhao, Huihui Pan, and Liandi Fang. 2025. "A Model-Free Fractional-Order Composite Control Strategy for High-Precision Positioning of Permanent Magnet Synchronous Motor" Fractal and Fractional 9, no. 3: 161. https://doi.org/10.3390/fractalfract9030161
APA StyleGao, P., Zhao, C., Pan, H., & Fang, L. (2025). A Model-Free Fractional-Order Composite Control Strategy for High-Precision Positioning of Permanent Magnet Synchronous Motor. Fractal and Fractional, 9(3), 161. https://doi.org/10.3390/fractalfract9030161